基于激光雷達(dá)的移動配送機(jī)器人自主導(dǎo)航研究
2022-10-24 09:31:00施建壯張國偉盧秋紅吳松林
現(xiàn)代計算機(jī) 2022年16期
關(guān)鍵詞:移動機(jī)器人
施建壯,張國偉,,盧秋紅,黃 威,吳松林
(1.上海電力大學(xué)自動化工程學(xué)院,上海 200082;2.上海合時智能科技有限公司,上海 201100)
0 引言
隨著人工智能和物聯(lián)網(wǎng)技術(shù)的不斷發(fā)展,服務(wù)機(jī)器人產(chǎn)品作為智能設(shè)備也在進(jìn)行智能化轉(zhuǎn)型升級,不斷實(shí)現(xiàn)更強(qiáng)大的功能和更豐富的應(yīng)用。作為服務(wù)機(jī)器人的一個分支,室內(nèi)移動配送機(jī)器人,實(shí)現(xiàn)了一鍵配送餐飲功能,代替很多原有的重復(fù)性勞動工作。在國內(nèi)外疫情爆發(fā)情況下,室內(nèi)移動配送機(jī)器人可以避免人員接觸引起的感染,實(shí)現(xiàn)既安全又高效的配送餐飲。并且該室內(nèi)移動機(jī)器人所應(yīng)用的智能導(dǎo)航技術(shù)能夠解決在商場、酒店、餐廳、會議室等不同場所時,遇到地毯或坡面等不平坦道路的運(yùn)行穩(wěn)定性和行走能力問題,環(huán)境或者人為因素發(fā)生改變后的適應(yīng)性問題等。
室內(nèi)移動配送機(jī)器人利用激光雷達(dá)進(jìn)行自主定位和構(gòu)建地圖,再通過導(dǎo)航算法實(shí)現(xiàn)機(jī)器人自主路徑規(guī)劃功能。全局路徑規(guī)劃是移動配送機(jī)器人實(shí)現(xiàn)自主導(dǎo)航的關(guān)鍵技術(shù)之一,路徑規(guī)劃目的是在機(jī)器人獲得所處環(huán)境的全局信息之后,按照一定評價標(biāo)準(zhǔn)(如轉(zhuǎn)彎次數(shù)、時間及代價等),尋找出一條從起始節(jié)點(diǎn)到目標(biāo)節(jié)點(diǎn)的最合適路徑。目前,路徑規(guī)劃算法已經(jīng)非常成熟,使用較多的有A算法、人工勢場法、Dijkstra算法、遺傳算法和蟻群算法等。
由于A算法的可塑性和移植性較強(qiáng),被應(yīng)用于制造業(yè)、倉儲物流等領(lǐng)域。但傳統(tǒng)A算法存在拐點(diǎn)數(shù)量和遍歷節(jié)點(diǎn)較多、尋路時間較長等問題。目前,國內(nèi)外相關(guān)學(xué)者都對移動機(jī)器人全局路徑規(guī)劃方法展開了研究,且獲得一定的成果。本文以上海合時智能科技公司的室內(nèi)移動配送機(jī)器人作為研究硬件平臺,對移動機(jī)器人進(jìn)行室內(nèi)導(dǎo)航的研究。
1 路徑規(guī)劃算法
1.1 環(huán)境地圖的表示
機(jī)器人在路徑規(guī)劃前,要對所處環(huán)境進(jìn)行地圖構(gòu)建。按照維數(shù),可將地圖劃分為二維和三維地圖。三維地圖能夠真實(shí)地展示外部環(huán)境,但也更容易被環(huán)境影響,且計算量大。二維地圖可以分成柵格、幾何地圖等。柵格地圖由Elfes和Moraves最先提出,將外部環(huán)境分成多個單元格,稱為柵格,用概率值表示柵格被占據(jù)的可能性。柵格地圖是對靜態(tài)環(huán)境的近似表征,易于創(chuàng)建和維護(hù),因此本文采用柵格法來構(gòu)建地圖。柵格地圖中路徑規(guī)劃如圖1所示,白色表示可以通行的區(qū)域;黑色柵格表示障礙物。
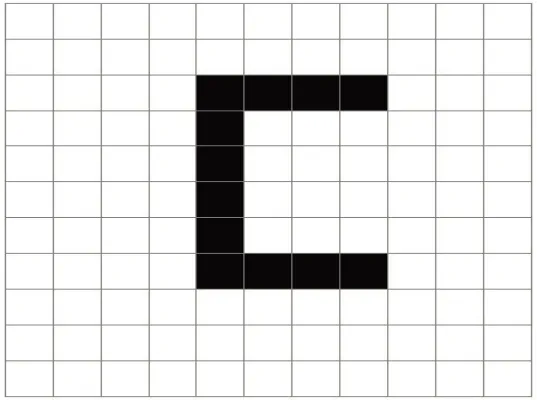
圖1 柵格地圖
1.2 傳統(tǒng)A*算法
A算法是在指定地圖上根據(jù)移動代價來找到最優(yōu)路徑的啟發(fā)式算法。其評價函數(shù)為:

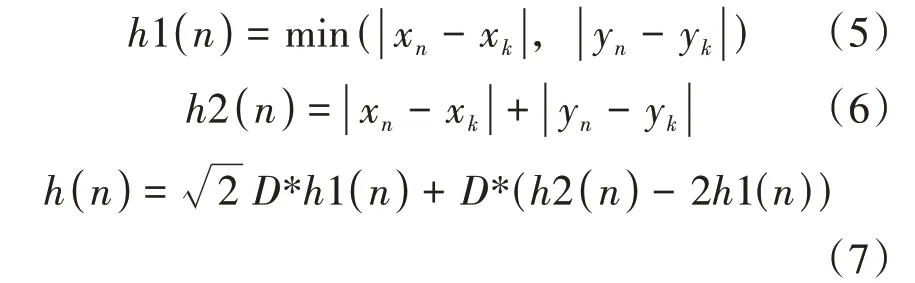
式中,()代表從起始節(jié)點(diǎn)經(jīng)過當(dāng)前節(jié)點(diǎn)到目標(biāo)節(jié)點(diǎn)的估算成本;()代表起始節(jié)點(diǎn)到的實(shí)際成本;()是A算法的啟發(fā)函數(shù),代表當(dāng)前節(jié)點(diǎn)到目標(biāo)節(jié)點(diǎn)的估算成本;在傳統(tǒng)A算法中都會使用歐氏距離計算()和()。

式中,(x,y)是當(dāng)前節(jié)點(diǎn)坐標(biāo),(,)和(x,y)分別是起始點(diǎn)和目標(biāo)點(diǎn)坐標(biāo)。()大小可以決定A算法的搜索效率和搜索路徑的長短,()的估值越小,A需要計算的節(jié)點(diǎn)越多,算法搜索的效率也就越低,當(dāng)()趨于0時,A就變成了Dijkstra算法;但是當(dāng)()估值遠(yuǎn)超()或者()等于0時,A就變成了最佳優(yōu)先搜索(BFS),此時算法只追求速度,不能得到最合適的路徑。
首先,在規(guī)劃路徑前需要定義兩個列表:一個是Openlist列表,用來存放即將要遍歷的節(jié)點(diǎn);另一個是Closelist列表,用來存放已遍歷過的節(jié)點(diǎn)。在尋路過程中,先要挑出Openlist列表中代價最低的節(jié)點(diǎn)添加進(jìn)Closelist列表中,再把代價最低節(jié)點(diǎn)周圍的鄰節(jié)點(diǎn)添加進(jìn)Openlist列表中。與此同時更新起始節(jié)點(diǎn)到各節(jié)點(diǎn)的代價()和各節(jié)點(diǎn)到目標(biāo)點(diǎn)的代價(),依次進(jìn)行迭代,直到目標(biāo)點(diǎn)加入了Openlist列表,尋路完成。傳統(tǒng)A算法尋路如圖2所示,黑色和白色分別表示不可通行和可通行區(qū)域,黑色線段表示路徑;表示起點(diǎn)、表示目標(biāo)點(diǎn),淺灰色區(qū)域?yàn)橐?guī)劃中遍歷的節(jié)點(diǎn)。
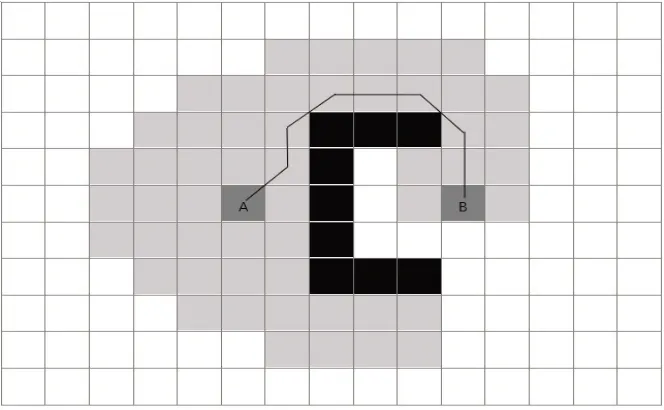
圖2 傳統(tǒng)A*尋路
2 改進(jìn)A*算法
傳統(tǒng)A算法存在遍歷節(jié)點(diǎn)和轉(zhuǎn)折點(diǎn)多,內(nèi)存消耗嚴(yán)重等問題。本文首先提出改進(jìn)啟發(fā)函數(shù)的計算方式,再結(jié)合選取關(guān)鍵點(diǎn)替換傳統(tǒng)A中Openlist和Closelist的兩個列表,剔除多余的冗余節(jié)點(diǎn),尋找出一條更優(yōu)路徑。
2.1 改進(jìn)啟發(fā)函數(shù)
傳統(tǒng)的A通常是采用歐氏距離計算(),定義移動機(jī)器人是八個方向,因此歐氏距離計算出()的代價值都小于當(dāng)前節(jié)點(diǎn)n到目標(biāo)節(jié)點(diǎn)的實(shí)際代價,從而導(dǎo)致尋路過程中遍歷的節(jié)點(diǎn)較多。
本文采用改進(jìn)曼哈頓距離計算函數(shù),傳統(tǒng)曼哈頓距離是指兩個點(diǎn)在標(biāo)準(zhǔn)坐標(biāo)系上絕對軸距之和,其基本距離公式為:

兩種啟發(fā)函數(shù)仿真結(jié)果對比如圖3所示,歐氏距離函數(shù)遍歷節(jié)點(diǎn)數(shù)為75個,曼哈頓距離函數(shù)遍歷節(jié)點(diǎn)數(shù)是48個,大大提高了搜索效率。
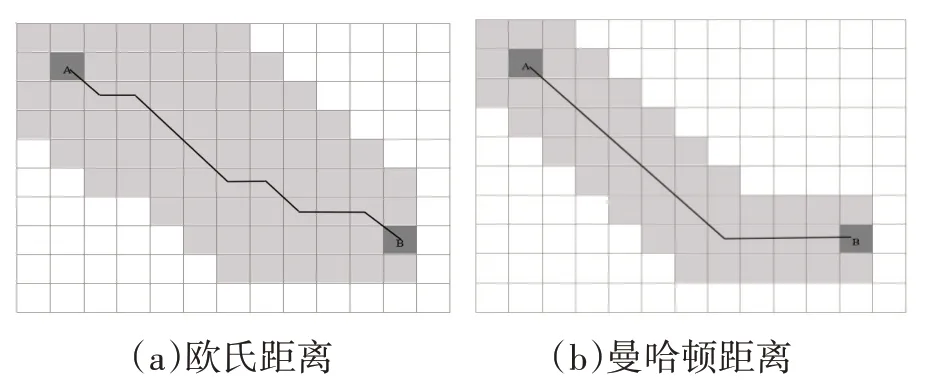
圖3 兩種啟發(fā)函數(shù)仿真結(jié)果
2.2 結(jié)合JPS改進(jìn)A*
在A算法規(guī)劃出路徑前采用JPS算法跳點(diǎn)搜索原理進(jìn)行預(yù)處理,JPS算法尋路可以分成兩個部分:第一是從Openlist列表中取一個最佳節(jié)點(diǎn),從幾個特定方向進(jìn)行搜索,將各個方向得到的跳躍點(diǎn)加入Openlist中;第二部分就是找到一個跳躍點(diǎn)。對于起始點(diǎn)是向所有方向進(jìn)行搜索;對于其它節(jié)點(diǎn),需要看父節(jié)點(diǎn)指向該節(jié)點(diǎn)的方向,再面向所有自然鄰節(jié)點(diǎn)和被迫鄰節(jié)點(diǎn)方向進(jìn)行搜索。
如圖4所示,節(jié)點(diǎn)周圍是無障礙物的,由于從父節(jié)點(diǎn)()出發(fā)到所有灰色擴(kuò)展節(jié)點(diǎn)的移動代價都小于或等于()經(jīng)過再到灰色節(jié)點(diǎn),因此不用計算灰色節(jié)點(diǎn),只用裁剪規(guī)則剪去灰色節(jié)點(diǎn)即可。
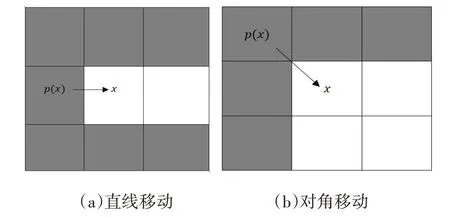
圖4 無障礙鄰節(jié)點(diǎn)
直線移動:

斜線移動:

如圖5所示,當(dāng)節(jié)點(diǎn)的相鄰節(jié)點(diǎn)有障礙物時,就不能修剪灰色節(jié)點(diǎn)。如果每一條從()出發(fā)經(jīng)過節(jié)點(diǎn)后到達(dá)節(jié)點(diǎn)的路徑都比不經(jīng)過節(jié)點(diǎn)的路徑短,那么節(jié)點(diǎn)就是強(qiáng)制鄰節(jié)點(diǎn),強(qiáng)制鄰節(jié)點(diǎn)的公式為:

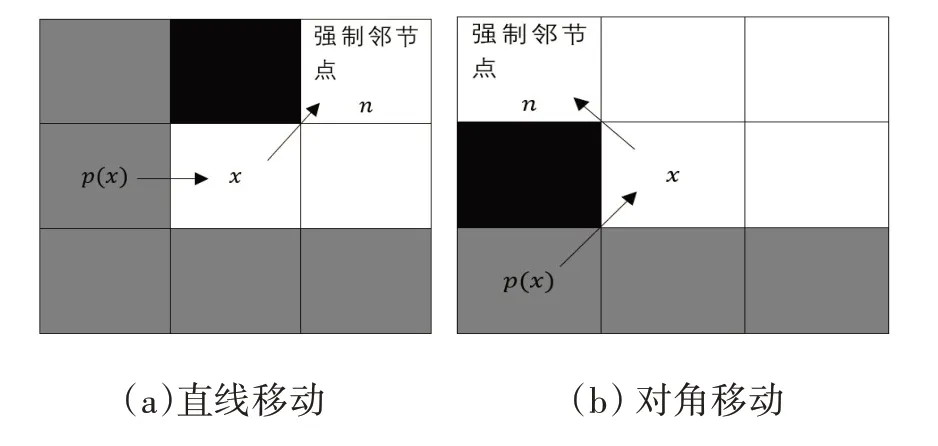
圖5 障礙鄰節(jié)點(diǎn)
一個節(jié)點(diǎn)是否為跳點(diǎn)可以從三個方面來判斷:①節(jié)點(diǎn)是起點(diǎn)或終點(diǎn);②節(jié)點(diǎn)在當(dāng)前搜索方向的前提下有強(qiáng)迫鄰居;③當(dāng)前搜索方向是斜向,且在節(jié)點(diǎn)處經(jīng)過該斜向的水平分量或垂直分量方向移動可以找到跳點(diǎn),那么當(dāng)前節(jié)點(diǎn)是跳點(diǎn)。
3 仿真分析
在柵格地圖上模擬公司環(huán)境搭建仿真地圖,將前臺設(shè)置為室內(nèi)移動機(jī)器人的起點(diǎn),收到送咖啡指令后將咖啡送到會議桌和展廳等不同的目標(biāo)點(diǎn)。在柵格地圖上通過采用改進(jìn)前后的A算法進(jìn)行對比,在CPU為i7-8565U@1.80Ghz的電腦上對其搜索路徑的效果進(jìn)行驗(yàn)證。從圖6所示的仿真結(jié)果可以看出,改進(jìn)后的A算法拐點(diǎn)數(shù)量和尋路過程中遍歷的節(jié)點(diǎn)數(shù)都大大減少,并且在尋路時間上也有所改善。
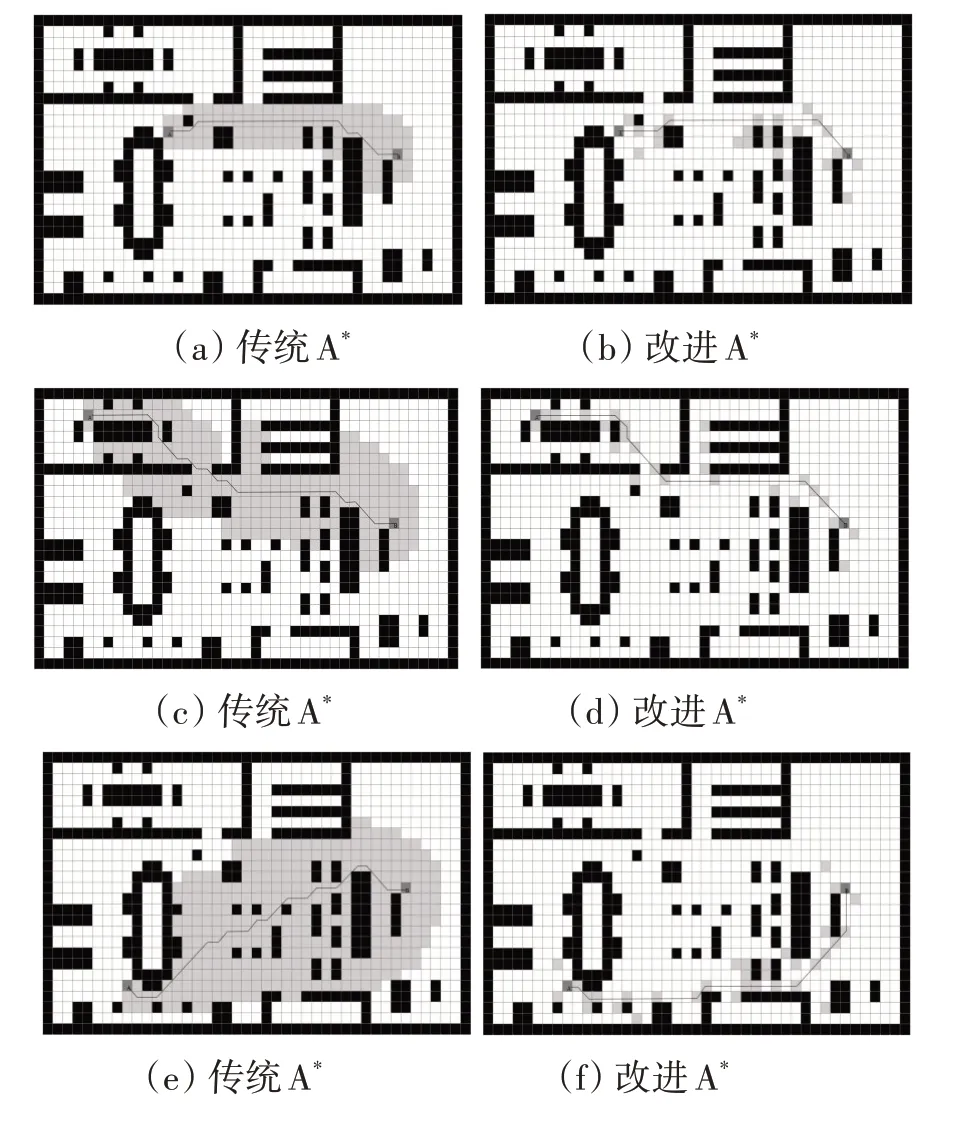
圖6 改進(jìn)A*前后仿真結(jié)果
表1列出了三組仿真結(jié)果中各項(xiàng)指標(biāo)的對比,改進(jìn)前后兩種算法路徑長度基本一樣,三條路徑的拐點(diǎn)數(shù)量相較于傳統(tǒng)A依次減少了50%、64%和60%,可以解決咖啡機(jī)器人運(yùn)送過程中拐彎次數(shù)多的問題;遍歷的節(jié)點(diǎn)數(shù)依次減少了75%、89%和89%,可以很大程度提高算法的搜索效率和內(nèi)存的占用率。
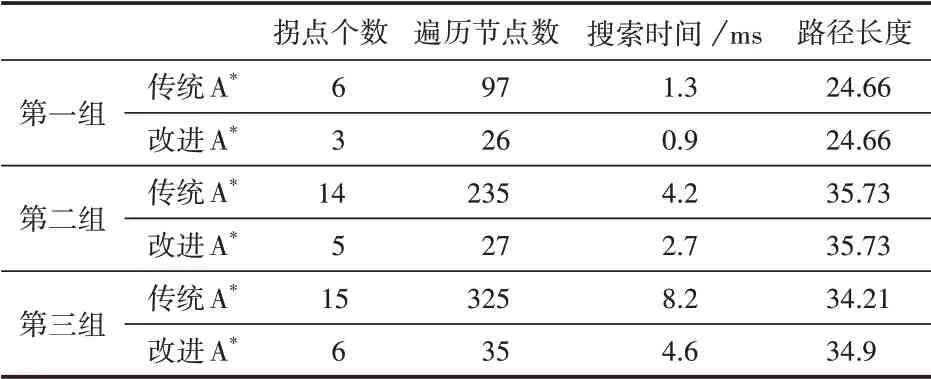
表1 仿真結(jié)果指標(biāo)對比
4 結(jié)語
針對傳統(tǒng)A算法在室內(nèi)移動配送機(jī)器人中存在轉(zhuǎn)折點(diǎn)和遍歷節(jié)點(diǎn)過多等問題,通過使用改進(jìn)曼哈頓作為啟發(fā)函數(shù),即在傳統(tǒng)曼哈頓距離函數(shù)中允許對角移動,這樣既可以解決歐氏距離的路徑最短但運(yùn)行時間長和傳統(tǒng)曼哈頓距離搜索時間短但路徑不是最短的問題,再結(jié)合跳點(diǎn)搜索改進(jìn)A算法轉(zhuǎn)折點(diǎn)過多的問題,避免運(yùn)送過程中咖啡灑落和機(jī)器多次轉(zhuǎn)彎發(fā)生電機(jī)堵轉(zhuǎn)的問題,提高了室內(nèi)移動咖啡機(jī)器人導(dǎo)航中的路徑搜索效率,符合室內(nèi)移動機(jī)器人的實(shí)際運(yùn)用。
猜你喜歡
北京航空航天大學(xué)學(xué)報(2022年6期)2022-07-02 01:59:12
四川輕化工大學(xué)學(xué)報(自然科學(xué)版)(2021年3期)2021-08-30 06:37:02
制造技術(shù)與機(jī)床(2017年3期)2017-06-23 08:11:21
智能系統(tǒng)學(xué)報(2015年4期)2015-12-27 09:38:35
中國海洋大學(xué)學(xué)報(自然科學(xué)版)(2014年8期)2014-02-28 12:21:31
中國海洋大學(xué)學(xué)報(自然科學(xué)版)(2014年7期)2014-02-28 12:21:19
