基于MCGS的刮板鏈條自動(dòng)拆裝控制系統(tǒng)研究
2022-10-23 14:00:32路超超周好斌徐向前
機(jī)械制造與自動(dòng)化 2022年5期
關(guān)鍵詞:設(shè)備
路超超,周好斌,徐向前
(西安石油大學(xué) 材料科學(xué)與工學(xué)院,陜西 西安710065)
0 引言
刮板運(yùn)輸機(jī)作為煤炭開(kāi)采過(guò)程中的主要設(shè)備,其運(yùn)作效率、運(yùn)作模式直接決定了煤礦生產(chǎn)能力。刮板鏈條作為刮板運(yùn)輸機(jī)的重要組成部分,主要用來(lái)進(jìn)行煤炭的運(yùn)輸,其工作狀態(tài)的好壞對(duì)刮板運(yùn)輸機(jī)的工作效率有著重要的影響。然而隨著刮板運(yùn)輸機(jī)的長(zhǎng)時(shí)間運(yùn)行且工作環(huán)境差,導(dǎo)致刮板鏈條出現(xiàn)磨損、斷裂等問(wèn)題,因此需要對(duì)其進(jìn)行維修。隨著近年煤炭市場(chǎng)的不斷發(fā)展,千萬(wàn)噸礦井群煤炭企業(yè)迅速崛起,刮板輸送機(jī)鏈條的消耗日益劇增[1-2],故實(shí)現(xiàn)刮板鏈條的自動(dòng)化拆裝具有重要意義。
目前,就刮板鏈條拆裝而言,國(guó)內(nèi)外均沒(méi)有相對(duì)成熟的刮板鏈條自動(dòng)拆裝設(shè)備,刮板鏈條一直由人工進(jìn)行拆裝,勞動(dòng)強(qiáng)度大,工作效率低且安全性低。賈寧等[3-4]雖然已經(jīng)對(duì)刮板鏈條自動(dòng)拆裝設(shè)備有了一定的研究,但到目前為止,其設(shè)備還存在諸多問(wèn)題尚未給出解決方案,且停留在設(shè)計(jì)研究階段,并未應(yīng)用于實(shí)際。因此,刮板鏈條自動(dòng)拆裝過(guò)程并未實(shí)現(xiàn)真正意義上的自動(dòng)化作業(yè)。
針對(duì)以上問(wèn)題,本課題采用MCGS組態(tài)軟件設(shè)計(jì)了一種刮板鏈條自動(dòng)拆裝設(shè)備控制系統(tǒng),其內(nèi)置編程引擎大大降低了控制系統(tǒng)的程序設(shè)計(jì)難度與程序量。該系統(tǒng)可以對(duì)刮板鏈條拆裝過(guò)程中的上料、輸送、拆卸、組裝以及緊固等各個(gè)過(guò)程實(shí)現(xiàn)自動(dòng)化控制,并對(duì)設(shè)備運(yùn)行過(guò)程進(jìn)行實(shí)時(shí)監(jiān)控,進(jìn)而提升刮板鏈條拆裝的質(zhì)量和效率。
1 刮板鏈條自動(dòng)拆裝控制系統(tǒng)任務(wù)及要求
1.1 刮板鏈條概述
刮板鏈條主要由圓環(huán)鏈、刮板、連接環(huán)和螺栓組裝而成,如圖1所示。隨著我國(guó)煤礦綜采工作面的不斷加長(zhǎng)以及煤炭開(kāi)采量的加大,刮板鏈條的使用與消耗也與日俱增,因此需要頻繁地對(duì)刮板鏈條進(jìn)行拆卸、組裝等工作。
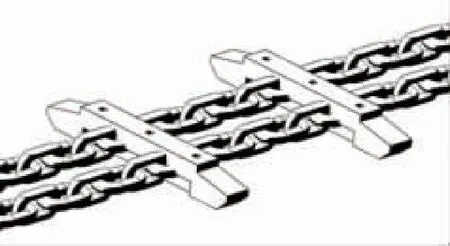
圖1 刮板鏈條結(jié)構(gòu)示意圖
1.2 刮板鏈條拆裝流程
刮板鏈條拆裝時(shí),首先需將刮板之間的連接螺栓進(jìn)行拆卸,使刮板上下部分分離,再將鏈條穿進(jìn)刮板上下部分之間,隨后進(jìn)行螺栓的組裝與緊固,其拆裝流程如圖2所示。

圖2 刮板鏈條拆裝流程圖
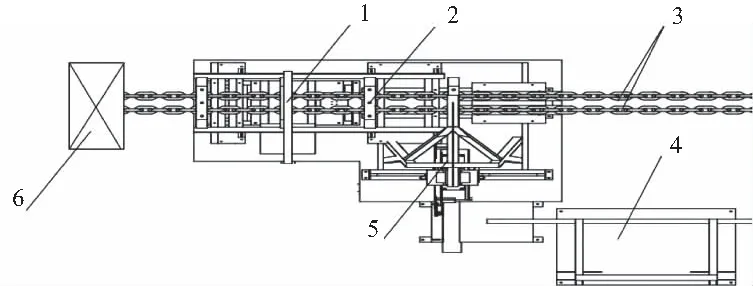
1—緊固工位;2—刮板;3—鏈條;4—上料工位;5—拆裝工位;6—卷?yè)P(yáng)機(jī)。
刮板鏈條自動(dòng)拆裝控制系統(tǒng)需在主控單元的控制下,保證該設(shè)備將刮板以及鏈條送至相應(yīng)的工位進(jìn)行作業(yè)。刮板組經(jīng)上料工位到達(dá)拆卸工位后,由拆裝裝置拆分開(kāi)來(lái),與鋪設(shè)好的鏈條進(jìn)行組裝,再由緊固工位的連接螺栓緊固裝置對(duì)螺栓進(jìn)行緊固,從而完成刮板與鏈條的組裝。
1.3 控制系統(tǒng)任務(wù)及要求
刮板鏈條自動(dòng)拆裝設(shè)備的裝配對(duì)象是大小不一的刮板和鏈條,裝配完成的刮板鏈主要用于刮板運(yùn)輸機(jī)。裝配前,刮板是封裝完整且未拆卸的狀態(tài),需將刮板從刮板堆中取出,將其上下兩部分拆卸分離,隨后,將鏈條與拆卸的刮板進(jìn)行裝配,再進(jìn)行螺栓的組裝與緊固操作。基于刮板鏈條拆裝設(shè)備自動(dòng)運(yùn)行以及工作過(guò)程的穩(wěn)定性、安全性和高效性,提出以下控制要求。
1)運(yùn)行方式:主要包括自動(dòng)運(yùn)行和手動(dòng)運(yùn)行兩種運(yùn)行方式,手動(dòng)運(yùn)行模式下,各個(gè)工位可以獨(dú)立地進(jìn)行手動(dòng)操作,主要用于調(diào)試和檢修工作;自動(dòng)運(yùn)行模式下可以實(shí)現(xiàn)刮板的上料、刮板的拆卸、刮板鏈條的組裝及緊固和刮板鏈條輸送等工序的自動(dòng)化運(yùn)行。
2)具有故障監(jiān)測(cè)功能:刮板鏈條自動(dòng)拆裝過(guò)程中不需人工干預(yù),電路由漏電斷路器等實(shí)現(xiàn)對(duì)各處以及各電機(jī)的短路、過(guò)載和漏電保護(hù)。設(shè)有故障報(bào)警功能和急停開(kāi)關(guān),防止突發(fā)事故。
3)便捷的人機(jī)交互界面:主要負(fù)責(zé)系統(tǒng)運(yùn)行參數(shù)的設(shè)定以及修改,同時(shí)顯示系統(tǒng)運(yùn)行狀態(tài)以及故障報(bào)警信息等,方便對(duì)系統(tǒng)進(jìn)行實(shí)時(shí)監(jiān)控。
4)運(yùn)行節(jié)拍控制:刮板鏈條的拆裝與緊固作為裝配線整體的核心工位,其拆裝與緊固的速度以及兩工位之間的傳動(dòng)節(jié)拍決定了系統(tǒng)的裝配效率以及裝配的連續(xù)性。
2 控制系統(tǒng)硬件設(shè)計(jì)
根據(jù)刮板鏈條自動(dòng)拆裝控制系統(tǒng)的控制要求,采用昆侖通態(tài)的MCGS嵌入式一體化觸摸屏對(duì)系統(tǒng)進(jìn)行總體控制[5-6]。控制系統(tǒng)硬件結(jié)構(gòu)圖如圖4所示,昆侖通態(tài)觸摸屏MCGS作為主控制單元,通過(guò)I/O控制模塊的輸入/輸出完成對(duì)控制信號(hào)的處理以及電磁閥動(dòng)作控制,同時(shí)利用多軸運(yùn)動(dòng)控制器對(duì)步進(jìn)電機(jī)進(jìn)行控制,各個(gè)模塊之間通過(guò)RS485進(jìn)行通信,完成刮板鏈條自動(dòng)拆裝系統(tǒng)的工藝控制以及相關(guān)參數(shù)的調(diào)整等。礦用刮板鏈條自動(dòng)拆裝系統(tǒng)的硬件主要包括嵌入式觸摸屏、I/O控制模塊、運(yùn)動(dòng)控制器、步進(jìn)電機(jī)驅(qū)動(dòng)器、氣缸、步進(jìn)電機(jī)、減速器、電磁閥以及限位開(kāi)關(guān)和傳感器等。

圖4 控制系統(tǒng)硬件結(jié)構(gòu)
3 控制系統(tǒng)軟件設(shè)計(jì)
3.1 系統(tǒng)軟件設(shè)計(jì)
刮板鏈條自動(dòng)拆裝控制系統(tǒng)采用昆侖通態(tài)MCGS嵌入式一體化觸摸屏作為主控制單元,基于MCGS組態(tài)軟件設(shè)計(jì)完成的。通過(guò)設(shè)計(jì)的組態(tài)界面,不僅實(shí)現(xiàn)了刮板鏈條拆裝過(guò)程中每個(gè)步驟的協(xié)調(diào)控制以及整體拆裝過(guò)程的自動(dòng)化作業(yè),也能對(duì)系統(tǒng)運(yùn)行狀態(tài)進(jìn)行實(shí)時(shí)監(jiān)控。控制系統(tǒng)的組成如圖5所示。
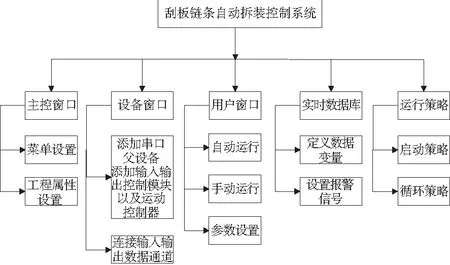
圖5 刮板鏈條自動(dòng)拆裝控制系統(tǒng)的組成
為實(shí)現(xiàn)TPC與各個(gè)控制模塊的正常通信與通道連接,在設(shè)備窗口添加設(shè)備通信設(shè)置。本設(shè)計(jì)觸摸屏TPC類(lèi)型為T(mén)PC1061 Ti,控制模塊包括SRND-CM系列I/0控制模塊與五豐系列多軸運(yùn)動(dòng)控制器,通過(guò)串口父設(shè)備將各個(gè)設(shè)備進(jìn)行連接并實(shí)現(xiàn)通信;在設(shè)備編輯窗口內(nèi),為每個(gè)設(shè)備設(shè)置不同的設(shè)備地址并添加相應(yīng)的設(shè)備通道及通道變量。通道變量設(shè)置完成后,根據(jù)實(shí)際需求為合適的通道選擇適當(dāng)?shù)淖兞窟M(jìn)行連接;在實(shí)時(shí)數(shù)據(jù)庫(kù)中定義所需的數(shù)據(jù)變量及限位報(bào)警信號(hào),在用戶窗口動(dòng)畫(huà)組態(tài)過(guò)程中將其與相應(yīng)的操作進(jìn)行連接;在運(yùn)行策略窗口中可建立相應(yīng)的運(yùn)行策略以便系統(tǒng)穩(wěn)定運(yùn)行。至此,用MCGS組態(tài)軟件完成TPC的組態(tài)界面設(shè)計(jì)[7]。調(diào)試界面組態(tài)如圖6所示。

圖6 調(diào)試界面組態(tài)圖
3.2 運(yùn)行模式設(shè)計(jì)
刮板鏈條自動(dòng)拆裝控制系統(tǒng)包括手動(dòng)拆裝和自動(dòng)拆裝兩種運(yùn)行模式。根據(jù)各個(gè)工位的裝配流程,通過(guò)使用邏輯控制、脈沖輸出以及定時(shí)、延時(shí)等指令對(duì)每個(gè)工位進(jìn)行手動(dòng)、自動(dòng)運(yùn)行控制,同時(shí)參考各動(dòng)作之間的干擾條件以確保控制系統(tǒng)的安全性、可靠性。兩種運(yùn)行模式可通過(guò)點(diǎn)擊自動(dòng)運(yùn)行按鈕及手動(dòng)運(yùn)行按鈕進(jìn)行界面切換,實(shí)現(xiàn)了各個(gè)窗口之間的互鎖保護(hù)。
自動(dòng)控制模式下,各個(gè)工位按照裝配流程有序運(yùn)行。采用順序控制原則,根據(jù)執(zhí)行機(jī)構(gòu)的動(dòng)作要求以及該工位的動(dòng)作條件,通過(guò)主控制器進(jìn)行統(tǒng)一運(yùn)行控制,實(shí)現(xiàn)刮板的上料、刮板的拆卸、刮板鏈條的組裝及緊固和刮板鏈條輸送等工序的自動(dòng)化。當(dāng)觸摸屏上的“自動(dòng)運(yùn)行”按鈕變成綠色時(shí),表明自動(dòng)運(yùn)行模式正在運(yùn)行,自動(dòng)運(yùn)行流程圖如圖7所示。
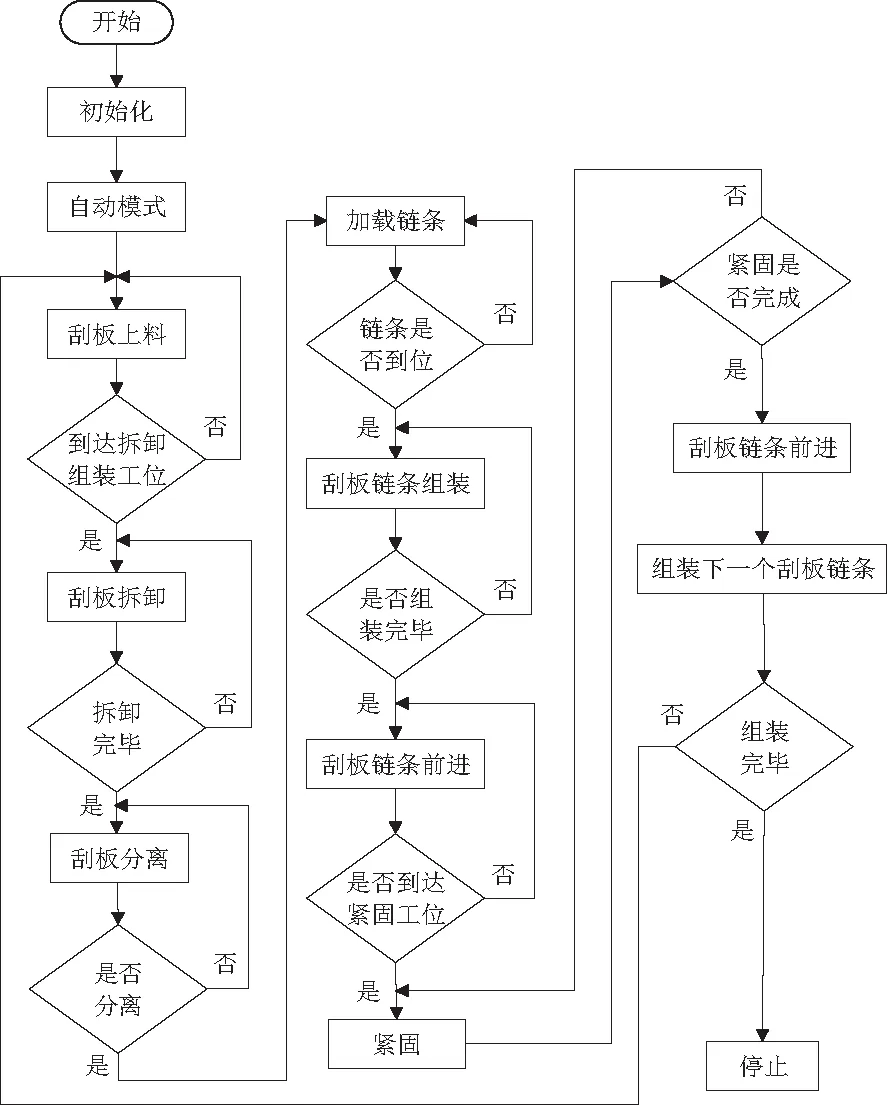
圖7 自動(dòng)運(yùn)行工作流程圖
手動(dòng)拆裝運(yùn)行模式下,各個(gè)工藝階段的開(kāi)啟與關(guān)閉都需要手動(dòng)點(diǎn)擊觸摸屏上的對(duì)應(yīng)按鈕,因此用戶可以通過(guò)點(diǎn)擊觸摸屏上相應(yīng)的操作按鈕對(duì)其進(jìn)行單一操作。同時(shí),也可以通過(guò)點(diǎn)擊參數(shù)輸入框?qū)ο到y(tǒng)運(yùn)行參數(shù)進(jìn)行修改,如電機(jī)運(yùn)行速度。
4 結(jié)語(yǔ)
本設(shè)計(jì)采用MCGS嵌入式一體化觸摸屏進(jìn)行刮板鏈條自動(dòng)拆裝工藝流程的控制,現(xiàn)場(chǎng)應(yīng)用結(jié)果表明:該系統(tǒng)實(shí)現(xiàn)了各個(gè)工位運(yùn)行的連續(xù)性與高效性,滿足刮板鏈條自動(dòng)拆裝控制系統(tǒng)控制要求的同時(shí),簡(jiǎn)化了控制系統(tǒng)結(jié)構(gòu),提高了刮板鏈條拆裝的自動(dòng)化程度;證明了由MCGS組態(tài)軟件設(shè)計(jì)的刮板鏈條自動(dòng)拆裝控制系統(tǒng)更加便于人員操作,并且增加了系統(tǒng)運(yùn)行的穩(wěn)定性和可靠性。
猜你喜歡
中國(guó)特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
當(dāng)代工人(2020年13期)2020-09-27 23:04:20
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(shù)(2017年11期)2017-12-20 08:10:57
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00
IT時(shí)代周刊(2015年8期)2015-11-11 05:50:37
汽車(chē)維修與保養(yǎng)(2015年1期)2015-04-17 03:25:28
設(shè)備管理與維修(2015年12期)2015-04-09 06:57:00
