工業(yè)機(jī)器人實(shí)訓(xùn)平臺(tái)模塊化可重構(gòu)硬件系統(tǒng)研究
2022-10-23 14:16:06陳暉于殿勇梁鳳順鄭陽(yáng)
機(jī)械制造與自動(dòng)化 2022年5期
關(guān)鍵詞:模塊化實(shí)訓(xùn)
陳暉,于殿勇,梁鳳順,鄭陽(yáng)
(1. 福建(泉州)哈工大工程技術(shù)研究院,福建 泉州 362008;2. 哈爾濱工業(yè)大學(xué),黑龍江 哈爾濱 150006)
0 引言
目前,市場(chǎng)上常見(jiàn)的教育機(jī)器人受其構(gòu)形限制,僅能完成單種教學(xué)任務(wù),無(wú)法滿足學(xué)生對(duì)機(jī)器人系統(tǒng)的組成、編程控制、功能實(shí)現(xiàn)、傳感器技術(shù)等較深層次了解與實(shí)現(xiàn)的需求[1]。為了實(shí)現(xiàn)工業(yè)機(jī)器人實(shí)訓(xùn)平臺(tái)多教學(xué)任務(wù)的高頻切換,需要實(shí)訓(xùn)平臺(tái)的物理空間跟隨任務(wù)空間進(jìn)行快速重構(gòu)響應(yīng)。工業(yè)機(jī)器人實(shí)訓(xùn)平臺(tái)模塊化可重構(gòu)的研究需要從機(jī)械結(jié)構(gòu)層、電氣硬件層、嵌入式控制層、上位控制層等多維度展開(kāi)。
首先,利用模糊聚類(lèi)的模塊劃分方法進(jìn)行模塊劃分及評(píng)價(jià),得到最佳模塊劃分粒度和模塊劃分方案。1965年,ZADEH L A教授首次提出了“集合”的概念,經(jīng)過(guò)50多年的發(fā)展,模糊聚類(lèi)理論逐漸在各領(lǐng)域得到廣泛應(yīng)用,并涌現(xiàn)出許多以模糊聚類(lèi)理論為數(shù)學(xué)基礎(chǔ)的聚類(lèi)分析算法,例如遺傳算法(GA)、神經(jīng)網(wǎng)絡(luò)算法(SOM)、模糊C均值聚類(lèi)算法(FCM)等[2]。國(guó)內(nèi)針對(duì)模塊劃分方法也進(jìn)行了一系列的研究,賈松敏等于2016年首次將模塊劃分技術(shù)應(yīng)用在機(jī)器人構(gòu)造領(lǐng)域[3]。
其次,從機(jī)械結(jié)構(gòu)層、電氣硬件層、嵌入式控制層展開(kāi)模塊化、可重構(gòu)設(shè)計(jì),實(shí)現(xiàn)基礎(chǔ)底層的快速重構(gòu)。PIRANFA S提出,模塊化設(shè)計(jì)是一種集產(chǎn)品、過(guò)程、系統(tǒng)為集合的結(jié)果,并在特定的任務(wù)需求條件下,完成對(duì)于系統(tǒng)的參數(shù)化設(shè)計(jì)[4]。模塊化、可重構(gòu)設(shè)計(jì)要求各單模塊單元都應(yīng)該有其獨(dú)有的功能,并且每個(gè)模塊之間均需保持一定的獨(dú)立性,只有這樣才能促使模塊更加專(zhuān)業(yè)化。同時(shí),各單模塊之間的機(jī)械接口和電氣接口不僅要進(jìn)行可靠連接,還要實(shí)現(xiàn)可快速拆換,保持其簡(jiǎn)單性和操作的便捷性[5]。
底層硬件系統(tǒng)的模塊化可重構(gòu)設(shè)計(jì)為上位機(jī)可重構(gòu)軟件系統(tǒng)的開(kāi)發(fā)奠定基礎(chǔ),為實(shí)現(xiàn)工業(yè)機(jī)器人實(shí)訓(xùn)平臺(tái)的快速重構(gòu)功能提供技術(shù)基礎(chǔ)。
1 實(shí)訓(xùn)平臺(tái)模塊劃分及評(píng)價(jià)
模塊化設(shè)計(jì)的主要目的是盡可能地用最少的模塊種類(lèi),完成最多的任務(wù)需求。合理的模塊劃分方案是模塊化設(shè)計(jì)的基礎(chǔ),模塊相對(duì)獨(dú)立性是模塊劃分的基本要求,需要將完成某一特定任務(wù)的實(shí)訓(xùn)平臺(tái)劃分為不可再分的基本模塊,這是一個(gè)粒度劃分和模糊聚類(lèi)的過(guò)程。傳統(tǒng)意義的模塊劃分主要從功能相關(guān)性、裝配相關(guān)性、空間相關(guān)性、信息相關(guān)性四個(gè)方面進(jìn)行劃分[6]:
功能相關(guān)性:兩個(gè)或者多個(gè)模塊的功能屬于同一個(gè)模塊的子功能,說(shuō)明模塊之間存在功能相關(guān)性;
裝配相關(guān)性:兩個(gè)或者多個(gè)模塊所對(duì)應(yīng)的結(jié)構(gòu)之間存在對(duì)應(yīng)的裝配關(guān)系,說(shuō)明模塊之間具有裝配相關(guān)性;
空間相關(guān)性:兩個(gè)或者多個(gè)模塊對(duì)應(yīng)的執(zhí)行結(jié)構(gòu)具有重疊的工作空間或者部分重疊的占據(jù)空間,說(shuō)明具有相同的空間相關(guān)性;
信息相關(guān)性:兩個(gè)或者多個(gè)模塊之間有一定的信息流交換或者信息流傳輸,包括能量、信號(hào)、力等信息流,說(shuō)明兩個(gè)模塊之間存在信息相關(guān)性。
通過(guò)分析并定義兩兩模塊之間的功能相關(guān)性、裝配相關(guān)性、空間相關(guān)性、信息相關(guān)性的依賴(lài)程度值,并構(gòu)造相關(guān)矩陣。可以利用Rij表示模塊之間的相關(guān)度,其計(jì)算公式如下:

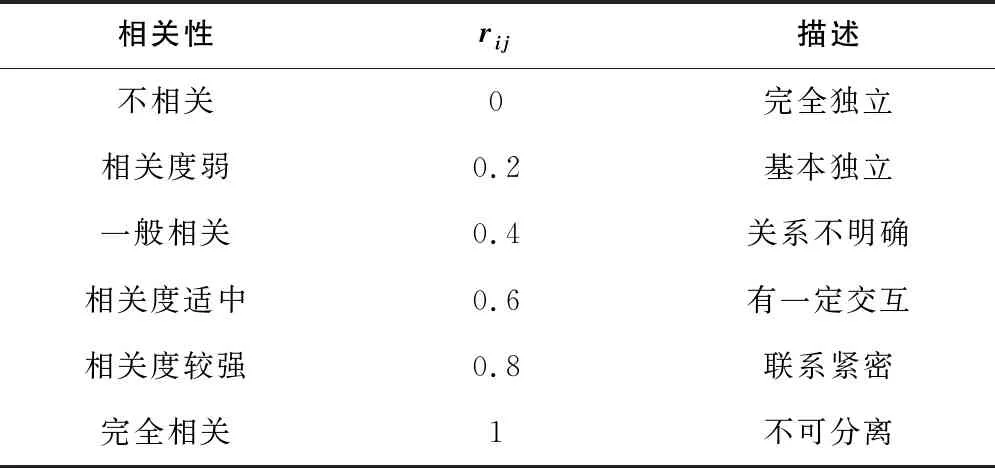
表1 模塊相關(guān)性取值表
依據(jù)模塊相關(guān)性取值結(jié)果,構(gòu)建模塊相關(guān)性關(guān)系矩陣R=(rij)n×n,對(duì)關(guān)系矩陣進(jìn)行特征值計(jì)算,得出關(guān)系矩陣的特征向量并對(duì)其進(jìn)行歸一化處理。
在構(gòu)造關(guān)系矩陣進(jìn)行判斷時(shí),由于構(gòu)造過(guò)程中帶有的主觀性和影響因素的復(fù)雜性,所以,需要對(duì)模塊劃分結(jié)果進(jìn)行一致性檢驗(yàn),從而得出更具有客觀性的結(jié)果。故繼續(xù)計(jì)算關(guān)系矩陣的最大特征值,判斷關(guān)系矩陣的收斂半徑,通過(guò)定義收斂半徑的有效值區(qū)間來(lái)評(píng)價(jià)關(guān)系矩陣的可信度。
通過(guò)以上模糊聚類(lèi)的模塊劃分和評(píng)價(jià)方法,對(duì)工業(yè)機(jī)器人實(shí)訓(xùn)平臺(tái)進(jìn)行模塊劃分,得到最佳模塊劃分方案如表2所示。
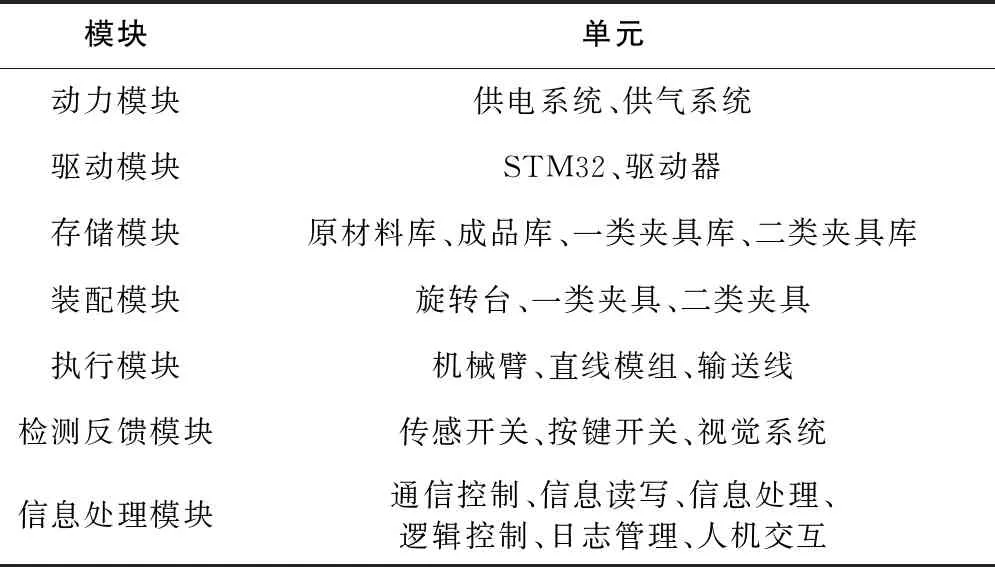
表2 實(shí)訓(xùn)平臺(tái)模塊劃分表
2 實(shí)訓(xùn)平臺(tái)機(jī)械模塊化
機(jī)械模塊作為工業(yè)機(jī)器人實(shí)訓(xùn)平臺(tái)的最基本組成部分,主要由工業(yè)機(jī)器人子模塊、直線模組子模塊、旋轉(zhuǎn)工裝臺(tái)子模塊、夾具庫(kù)子模塊、其他輔助子模塊等組成,總體結(jié)構(gòu)如圖1所示。工業(yè)機(jī)器人子模塊完成工件、工裝以及夾具的移動(dòng),并在旋轉(zhuǎn)工裝臺(tái)子模塊上完成工件的裝配作業(yè);直線模組子模塊輔助完成工業(yè)機(jī)器人的平移動(dòng)作,采用伺服控制和驅(qū)動(dòng),能夠?qū)崿F(xiàn)在直線模組行程范圍內(nèi)的任意位置停靠,從而有效增大工業(yè)機(jī)器人的作業(yè)空間;旋轉(zhuǎn)工裝臺(tái)子模塊包含多個(gè)工裝位,通過(guò)旋轉(zhuǎn)平臺(tái)匹配任務(wù)需求的工裝位置,且可通過(guò)兩個(gè)旋轉(zhuǎn)工裝子模塊中的工裝位組合形成任務(wù)需求的新工裝位置;夾具庫(kù)子模塊涵蓋了所有任務(wù)需求的夾具,工業(yè)機(jī)器人可從夾具庫(kù)中選取任務(wù)需求的夾具,通過(guò)工業(yè)機(jī)器人末端的氣動(dòng)控制閥實(shí)現(xiàn)夾具的快速更換。機(jī)械模塊采用基于構(gòu)件的功能特征、構(gòu)形特征和接口特征實(shí)現(xiàn)子模塊劃分,再利用“搭積木”的思想完成各子模塊的連接[7]。
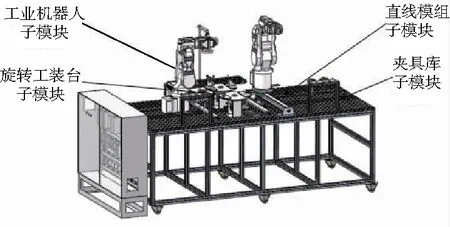
圖1 工業(yè)機(jī)器人實(shí)訓(xùn)平臺(tái)
機(jī)械模塊化設(shè)計(jì)的思路體現(xiàn)在各子模塊的可拓展性、可重構(gòu)性設(shè)計(jì)中,例如:工業(yè)機(jī)器人子模塊采用雙工業(yè)機(jī)器人協(xié)作的方式,其中一臺(tái)機(jī)器人底座固定,另一臺(tái)機(jī)器人底座固定在直線模組上,可跟隨直線模組子模塊進(jìn)行平移動(dòng)作,從而實(shí)現(xiàn)機(jī)器人子模塊的作業(yè)空間可依據(jù)實(shí)際的任務(wù)需求而拓展及重構(gòu)。旋轉(zhuǎn)工裝臺(tái)子模塊包含兩個(gè)獨(dú)立控制的旋轉(zhuǎn)工裝臺(tái),每個(gè)旋轉(zhuǎn)工裝臺(tái)上擁有多個(gè)工裝位,每個(gè)工裝位不僅可以獨(dú)立使用,也可以與其他工裝位進(jìn)行組合使用,從而實(shí)現(xiàn)旋轉(zhuǎn)工裝臺(tái)子模塊的工裝位組合可依據(jù)實(shí)際任務(wù)需求而拓展及重構(gòu),旋轉(zhuǎn)工裝臺(tái)子模塊擴(kuò)展如圖2所示。夾具庫(kù)子模塊包含所有任務(wù)所需的夾具,工業(yè)機(jī)器人末端與夾具的之間采用氣動(dòng)閥完成快速取放動(dòng)作。工業(yè)機(jī)器人根據(jù)不同的任務(wù)需求從夾具庫(kù)子模塊中選取所需要的夾具進(jìn)行作業(yè),通過(guò)不同夾具的組合重構(gòu),可拓展更多的任務(wù)需求。同時(shí),夾具定位銷(xiāo)全部通用化設(shè)計(jì),夾具庫(kù)采用模塊化拼裝的裝配,具備更好的拆裝性和可拓展性,夾具庫(kù)子模塊擴(kuò)展如圖3所示。
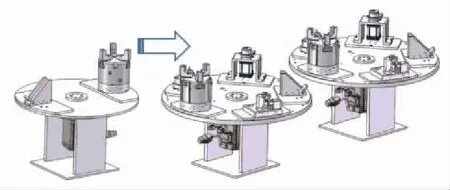
圖2 旋轉(zhuǎn)臺(tái)模塊

圖3 夾具庫(kù)模塊
3 實(shí)訓(xùn)平臺(tái)硬件模塊化
硬件模塊實(shí)現(xiàn)實(shí)訓(xùn)平臺(tái)的通電和通信,采用模塊化設(shè)計(jì)的思路,以電控柜為核心模塊將所有模塊通過(guò)電源系統(tǒng)和通信系統(tǒng)關(guān)聯(lián)在一起。
電源系統(tǒng)的設(shè)計(jì)遵循強(qiáng)弱電分離、驅(qū)動(dòng)電源與控制電源分離的原則,對(duì)設(shè)備各模塊進(jìn)行電源分配,并對(duì)電源系統(tǒng)實(shí)施漏電保護(hù)、過(guò)壓保護(hù)、過(guò)流保護(hù)以及過(guò)溫保護(hù)等保護(hù)措施。電源系統(tǒng)以AC220 V電源作為輸入,經(jīng)過(guò)斷路器和穩(wěn)壓模塊后直接提供工業(yè)機(jī)器人驅(qū)動(dòng)、旋轉(zhuǎn)平臺(tái)電機(jī)驅(qū)動(dòng)、直線模組電機(jī)驅(qū)動(dòng)、輸送線變頻器驅(qū)動(dòng)的供電需求。電控柜中的照明燈、電源燈以及散熱風(fēng)扇也由AC220 V電源直接供電。為了滿足控制相關(guān)電路對(duì)低壓直流電源的需求,電源系統(tǒng)還配備了AC220 V轉(zhuǎn)DC24 V的隔離電源模塊,為MCU、交換機(jī)、繼電器、指示燈、限位開(kāi)關(guān)等低壓用電器提供電源。電源系統(tǒng)框架如圖4所示。
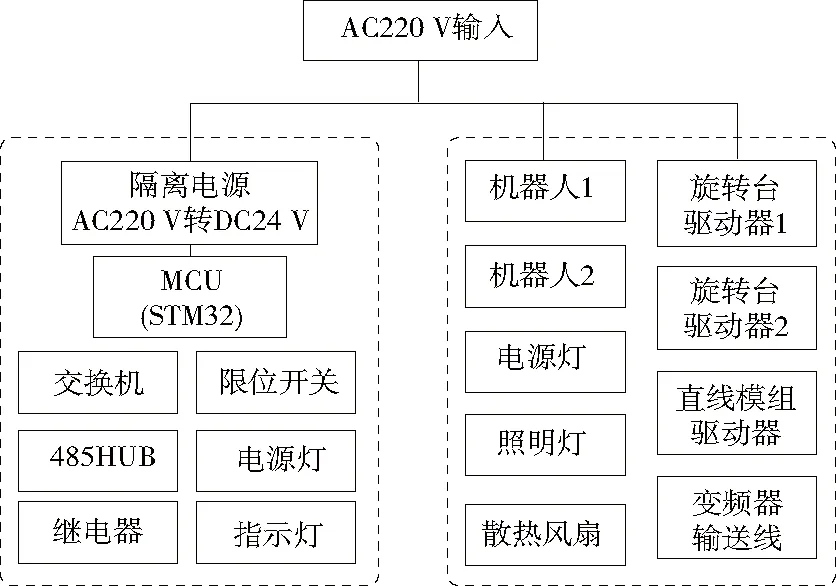
圖4 電源系統(tǒng)框架
各模塊間的網(wǎng)絡(luò)通信以有線網(wǎng)絡(luò)接入多接口的交換機(jī)進(jìn)行網(wǎng)絡(luò)規(guī)劃。工業(yè)機(jī)器人之間的網(wǎng)絡(luò)通信通過(guò)最通用的以太網(wǎng)形式完成。以太網(wǎng)在機(jī)器人設(shè)備之間實(shí)現(xiàn)多通道傳輸,傳輸速度可達(dá)到百兆級(jí)別,為機(jī)器人的快速響應(yīng)奠定了基礎(chǔ)。MCU與伺服電機(jī)、變頻器之間的網(wǎng)絡(luò)通信通過(guò)RS485形式完成,并預(yù)留RS485擴(kuò)展接口。RS485通信可實(shí)現(xiàn)相對(duì)封閉區(qū)域內(nèi)數(shù)十臺(tái)設(shè)備的聯(lián)網(wǎng)集中控制,傳輸速度可達(dá)到十兆級(jí)別,且抗噪聲干擾能力強(qiáng),在非標(biāo)自動(dòng)化設(shè)備的電氣通信系統(tǒng)中應(yīng)用廣泛。網(wǎng)絡(luò)拓?fù)淙鐖D5所示。
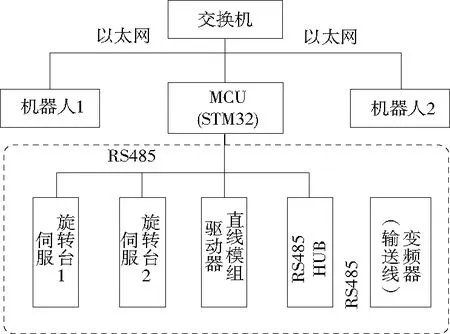
圖5 網(wǎng)絡(luò)拓?fù)鋱D
4 實(shí)訓(xùn)平臺(tái)嵌入式模塊化
基于單片機(jī)系統(tǒng)設(shè)計(jì)的實(shí)訓(xùn)平臺(tái)嵌入式控制系統(tǒng)框如圖6所示,處理器為MCU單片機(jī)處理器(STM32)。MCU負(fù)責(zé)接收上位機(jī)的任務(wù)指令,并向上位機(jī)反饋底層狀態(tài)和故障信息,其在上位機(jī)與執(zhí)行單元之間起到連接橋梁作用[8]。
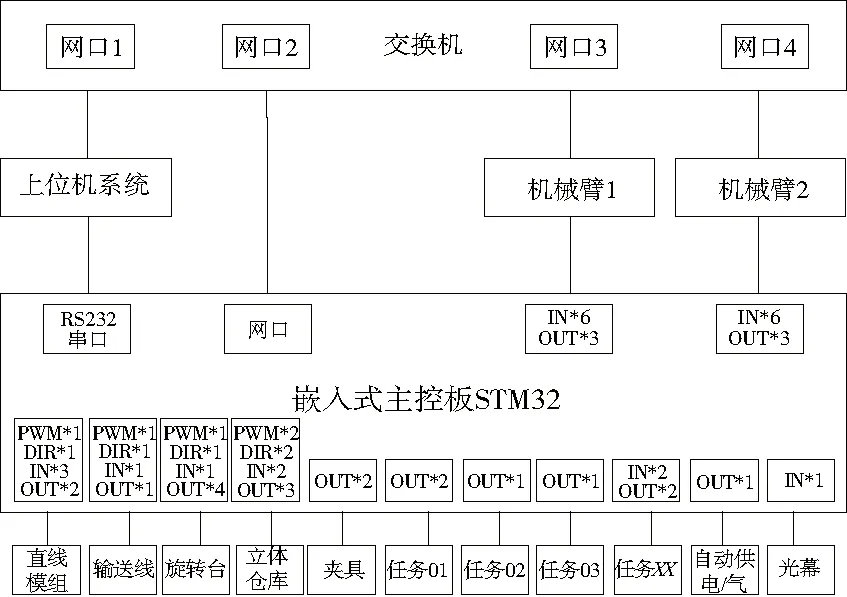
圖6 控制系統(tǒng)框架圖
MCU連接上位機(jī)與執(zhí)行單元的模式分為兩種。一種是伺服控制模式,上位機(jī)將任務(wù)指令發(fā)送至MCU中,MCU處理后將運(yùn)行速度、位置增量等信息通過(guò)RS485、CAN、CANopen等通信方式發(fā)送至伺服驅(qū)動(dòng)器,從而控制旋轉(zhuǎn)工裝臺(tái)或直線模組電機(jī)作動(dòng)。同時(shí),MCU定時(shí)查詢驅(qū)動(dòng)器的狀態(tài)和故障信息,并將信息反饋至上位機(jī)。MCU通過(guò)IO控制實(shí)現(xiàn)對(duì)氣動(dòng)閥門(mén)、急停開(kāi)關(guān)、限位開(kāi)關(guān)等傳感設(shè)備的監(jiān)控,并將狀態(tài)信息反饋至上位機(jī)。另一種是DI/DO控制模式,上位機(jī)將任務(wù)指令發(fā)送至MCU中,MCU處理后將氣動(dòng)閥門(mén)開(kāi)關(guān)指令、指示燈開(kāi)關(guān)指令通過(guò)DO控制模式下發(fā)。MCU采用DI采集模式獲取限位開(kāi)關(guān)、面板控制開(kāi)關(guān)等傳感信息,并進(jìn)行5 ms軟件濾波,保證DI不受干擾,處理完成后反饋至上位機(jī)。上位機(jī)根據(jù)工業(yè)機(jī)器人和嵌入式底層控制器的狀態(tài),逐步運(yùn)行工件裝配的工藝流程步驟,每步都需要滿足相應(yīng)的條件才可執(zhí)行下一個(gè)流程步驟。
STM32單片機(jī)具備高能效存儲(chǔ)擴(kuò)展接口以及各種通信接口[9]:板載光耦隔離輸入,最大可支持56路輸入信號(hào);板載繼電器輸出,最大可支持35路輸出信號(hào); 板載4路帶隔離RS485通信接口、2路帶2 500 V磁隔離CAN通信接口、1路RS232通信串口接口;板載2路24 V電壓輸出、支持8~28 V寬電壓輸入等,并以百兆以太網(wǎng)通信。在設(shè)計(jì)過(guò)程中將IO接口和通信接口進(jìn)行模塊化分,并預(yù)留擴(kuò)展接口,在底層嵌入式層面實(shí)現(xiàn)模塊化可重構(gòu)設(shè)計(jì)。
5 運(yùn)行測(cè)試
基于底層硬件系統(tǒng)搭建完成的實(shí)訓(xùn)平臺(tái)開(kāi)展試運(yùn)行測(cè)試工作,主要測(cè)試內(nèi)容分4個(gè)步驟:首先,完成旋轉(zhuǎn)工裝臺(tái)、直線模組、工業(yè)機(jī)器人、傳感器等單模塊通電試運(yùn)行,不發(fā)生機(jī)械干涉,信號(hào)反饋正常;其次,完成電控系統(tǒng)整體通電和通信試運(yùn)行,各模塊與電源之間通電正常,各模塊與MCU之間通信和控制信號(hào)正常;然后,通過(guò)串口通信逐步下發(fā)任務(wù)指令,使各模塊順利協(xié)作完成簡(jiǎn)單的工件裝配作業(yè),過(guò)程中機(jī)械定位準(zhǔn)確,通信正常,執(zhí)行反饋正常;最后,根據(jù)理論分析的最佳模塊劃分結(jié)果,進(jìn)行模塊重構(gòu)新的執(zhí)行任務(wù),順利完成新裝配任務(wù),試運(yùn)行測(cè)試成功完成。將試運(yùn)行測(cè)試過(guò)程中所有測(cè)試履歷及數(shù)據(jù)記錄進(jìn)行系統(tǒng)合理性分析,并整理歸檔。
6 結(jié)語(yǔ)
通過(guò)對(duì)工業(yè)機(jī)器人實(shí)訓(xùn)平臺(tái)模塊化可重構(gòu)硬件系統(tǒng)的研究,完成了實(shí)訓(xùn)平臺(tái)模塊劃分和評(píng)價(jià)方法的定義,并搭建實(shí)訓(xùn)平臺(tái)基礎(chǔ)底層硬件系統(tǒng),實(shí)現(xiàn)了實(shí)訓(xùn)平臺(tái)底層硬件系統(tǒng)的模塊化可重構(gòu)功能。同時(shí),順利完成了實(shí)訓(xùn)平臺(tái)底層硬件系統(tǒng)的測(cè)試、軟件的調(diào)試、整體設(shè)備的試運(yùn)行測(cè)試、模塊化可重構(gòu)方法的驗(yàn)證測(cè)試,積累了實(shí)訓(xùn)平臺(tái)底層硬件系統(tǒng)的設(shè)計(jì)經(jīng)驗(yàn)和實(shí)測(cè)數(shù)據(jù)。針對(duì)底層硬件系統(tǒng)的模塊化可重構(gòu)設(shè)計(jì)不足之處,明確了后續(xù)優(yōu)化方向,為后續(xù)上位機(jī)可重構(gòu)軟件系統(tǒng)的開(kāi)發(fā)奠定基礎(chǔ),為實(shí)現(xiàn)工業(yè)機(jī)器人實(shí)訓(xùn)平臺(tái)的快速重構(gòu)功能提供技術(shù)基礎(chǔ)。
猜你喜歡
海洋信息技術(shù)與應(yīng)用(2022年1期)2022-06-05 07:38:22
裝備制造技術(shù)(2021年2期)2021-07-21 05:38:44
現(xiàn)代裝飾(2020年5期)2020-05-30 13:01:56
裝備制造技術(shù)(2020年12期)2020-05-22 09:25:38
福建教育學(xué)院學(xué)報(bào)(2019年4期)2019-06-12 08:39:10
中國(guó)核電(2017年2期)2017-08-11 08:00:56
計(jì)算機(jī)測(cè)量與控制(2017年6期)2017-07-01 16:23:53
流程工業(yè)(2017年4期)2017-06-21 06:29:52
流程工業(yè)(2017年4期)2017-06-21 06:29:50
電子制作(2017年8期)2017-06-05 09:36:15
