機器人關節傳動系統固有特性分析
2022-10-21 07:17:50胡效松楊振寧馮志友周長鵬黃云生
機械傳動 2022年10期
莫 帥 胡效松 楊振寧 馮志友 李 旭 周長鵬 黃云生
(1 天津工業大學 機械工程學院, 天津 300387)
(2 江蘇萬基傳動科技有限公司, 江蘇 泰州 225400)
(3 深圳市合發齒輪機械有限公司, 廣東 深圳 518100)
0 引言
隨著智能制造技術快速發展,機器人的種類以及應用場景也更加廣泛,例如多功能機械臂、教育機器人、服務機器人等。機器人關節作為機器人的核心部件,主要由驅動控制部分和電機-齒輪傳動系統構成。機器人關節所用電機多是無刷直流電機,具有轉速高、轉矩大等特點,在電機拖動齒輪傳動系統轉動時,齒輪傳動系統的動力學特性變得十分復雜[1]。在長時間高轉速、高負載下,可能會出現“掃齒”“斷齒”等故障,有必要對機器人關節中齒輪傳動系統固有特性進行分析。
目前,國內外學者對齒輪傳動系統固有特性進行了大量研究。王均剛等[2]建立風電增速箱多級耦合傳動系統動力學模型,研究了系統的固有頻率和振動模式。Liu 等[3]建立風力發電機多級齒輪傳動系統動力學模型,計算了該系統的固有頻率和主振型。黃孝慈[4]建立混合動力汽車多級齒輪系統動力學模型,分析了阻尼、剛度等參數對系統產生的扭轉振動的影響。Li等[5]對齒輪傳動系統的故障狀態進行模態分析,比較了不同故障形式對齒輪振動特性的影響。張麗娟[6]建立多級齒輪傳動系統微分方程,求解了系統各部件的振動加速度。李楠等[7]建立功率四分支齒輪傳動系統動力學模型,并對該系統的固有特性和動載系數變化進行了分析。Mo 等[8-9]建立齒輪行星系統動力學模型,對該系統的均載特性和固有頻率進行了分析。李國彥等[10]以復合兩級行星輪系為研究對象,分析了裂紋對該系統振動的影響。Lu等[11]建立兩級行星齒輪和多級正齒輪傳動系統的耦合模型,闡明了內外激勵對復雜傳動系統振動特性的影響。Shao 等[12]根據齒輪的實際工況,將支撐齒輪軸作為彈性支撐,研究了其對齒輪傳動系統振動的影響。鮑和云等[13]利用集中質量法建立了直升機傳動系統動力學模型。黃曉冬等[14]建立多級平行軸滾筒齒輪數學模型,分析了系統的動力學特性。王海霞等[15-16]建立船用齒輪箱傳動系統耦合動力學方程,計算了在時變嚙合剛度等條件下該系統的固有特性。胡鵬等[17]建立考慮時變剛度等因素的多級齒輪傳動系統動力學模型,研究了系統運行的平穩狀況。
以往對于小型、小模數齒輪傳動系統的研究較少,而這類系統內部結構更加復雜。機器人關節體型小,內部構件連接更加緊密,電機驅動電路板、無刷電機和齒輪傳動系統在結構上是整體結合在一起的,其動力學特性更是復雜多變。通過對機器人關節進行齒輪傳動系統固有特性分析,可以了解該系統振動情況,為機器人齒輪傳動系統設計提供理論依據。
圖1所示為研究的機器人關節及其傳動結構,主要由外殼、驅動電路板、電機、多級齒輪系統所構成。其中,齒輪傳動系統為4級定軸齒輪機構。本文中針對機器人關節小模數齒輪傳動系統建立動力學模型,進行了系統固有頻率、模態能分析,研究了系統參數對固有頻率的影響,分析了在剛度變化時,系統固有頻率發生的模態躍遷現象。

圖1 機器人關節及其傳動結構Fig.1 Robot joint and its transmission structure
1 動力學模型
為對機器人關節齒輪傳動系統進行研究,基于集中參數法建立了該系統動力學模型,如圖2 所示。系統中齒輪的嚙合、傳動軸的支撐和扭轉用具有一定剛度系數的彈簧表示,用K、C和e配上相應的下標分別表示剛度、阻尼和嚙合誤差。通過分析各齒輪的運動規律和自由度,得到系統的廣義位移矩陣為

圖2 機器人關節齒輪傳動系統動力學模型Fig.2 Dynamic model of robot joint gear transmission system

式中,x、y、θ分別為各構件沿坐標軸x、y的平移振動位移和繞中心軸的扭轉振動角度。
2 齒輪傳動系統動力學方程
2.1 嚙合力與嚙合阻尼力求解
圖3 所示為齒輪副平移-扭轉振動模型,顯示了處于嚙合狀態齒輪副的受力情況和相對位置關系。根據嚙合原理進行分析,在齒輪嚙合過程中,齒輪副在嚙合點處會因振動位移和誤差產生微位移,在計算齒輪副的嚙合力和嚙合阻尼力時,需要將每個齒輪的微位移投影到嚙合線上,以獲得齒輪副相對位移。
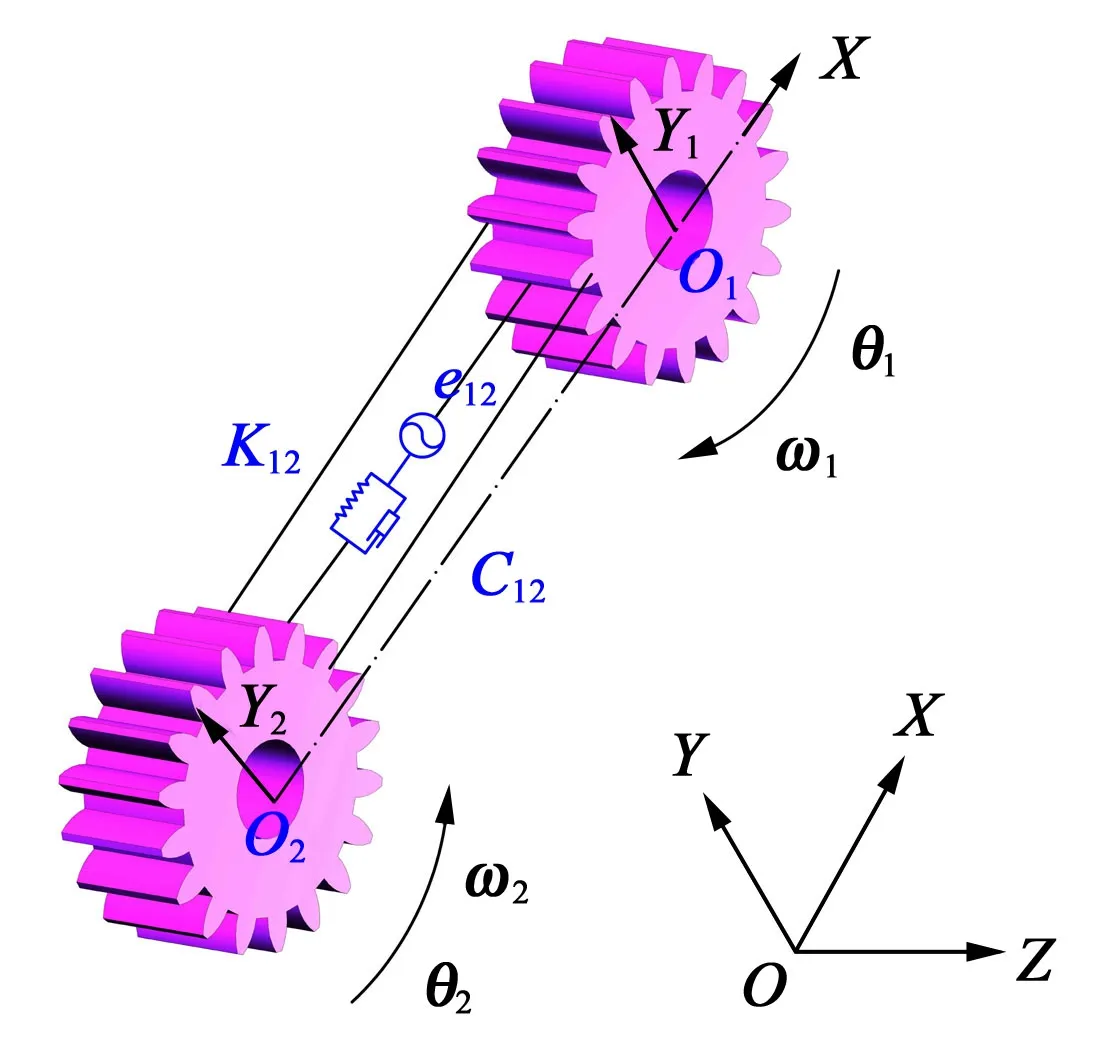
圖3 齒輪副平移-扭轉振動模型Fig.3 Translational torsional vibration model of gear pair
在機器人關節齒輪傳動系統中,各級齒輪副的相對位移δ分別為
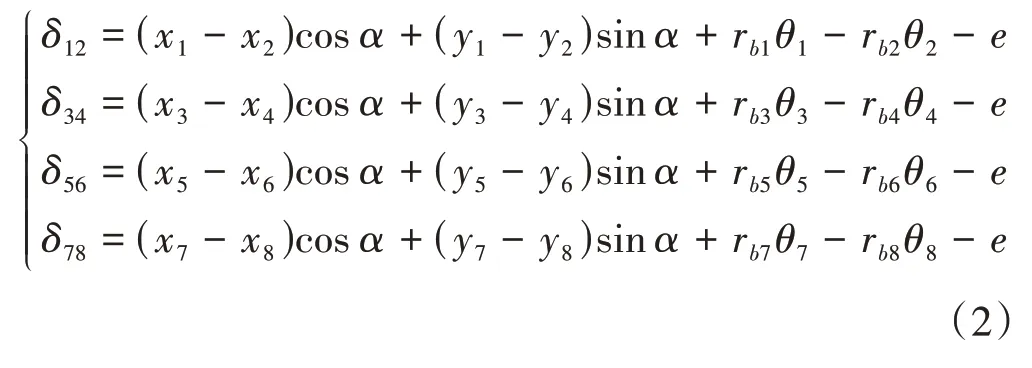
式中,rbi為齒輪i的基圓半徑;α為兩齒之間的壓力角;θi為齒輪i(i=1,2,…,8)的轉角;e為齒輪綜合嚙合誤差。
各級齒輪副的嚙合力和嚙合阻尼力分別為

式中,F12、F34、F56、F78均為齒輪間的動態嚙合力;D12、D34、D56、D78均 為 齒 輪間 的 嚙合 阻尼 力;K12、K34、K56、K78均為齒輪嚙合剛度;C12、C34、C56、C78均為齒輪嚙合阻尼系數。
2.2 動力學微分方程
通過分析各構件的受力情況,根據牛頓第二定律建立各構件的運動微分方程。以下各式中,m表示質量,J表示轉動慣量。
第一級齒輪副u12中主動輪g1和從動輪g2的動力學方程分別為


第二級齒輪副u34中主動輪g3和從動輪g4的動力學方程分別為

第三級齒輪副u56中主動輪g5和從動輪g6的動力學方程分別為

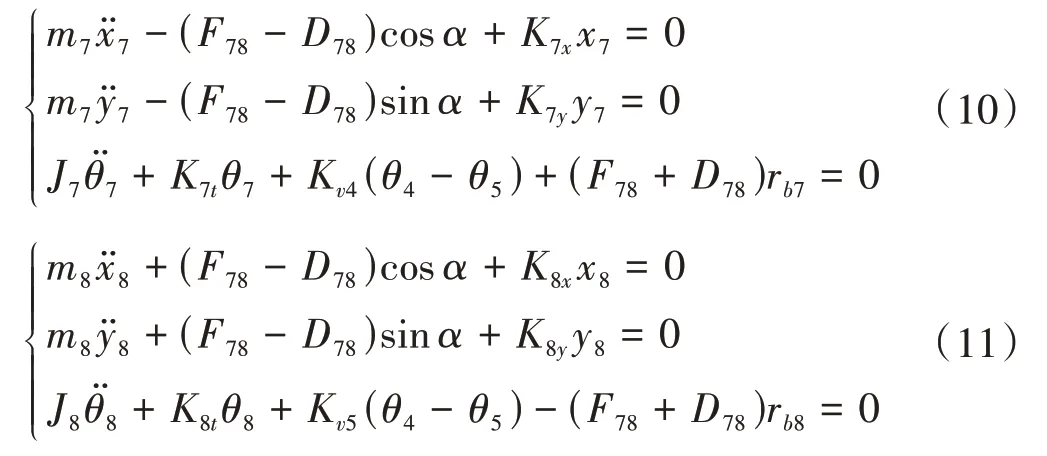
第四級齒輪副u78中主動輪g7和從動輪g8的動力學方程分別為
輸入構件M和輸出構件L的扭轉振動方程為

式中,Kix為齒輪i的x方向支撐剛度;Kiy為齒輪i的y方向支撐剛度;Kit為構件i(i=M,1,2,…,8,L)的切向支撐剛度;Kvj為傳動軸j(1,5 為輸出、輸出軸;2、3、4分別為雙聯軸Ⅰ、Ⅱ、Ⅲ)的扭轉剛度。
3 機器人關節齒輪傳動系統固有特性分析
機器人關節齒輪傳動系統采用4級定軸齒輪結構設計。其多級齒輪系統基本參數如表1所示。
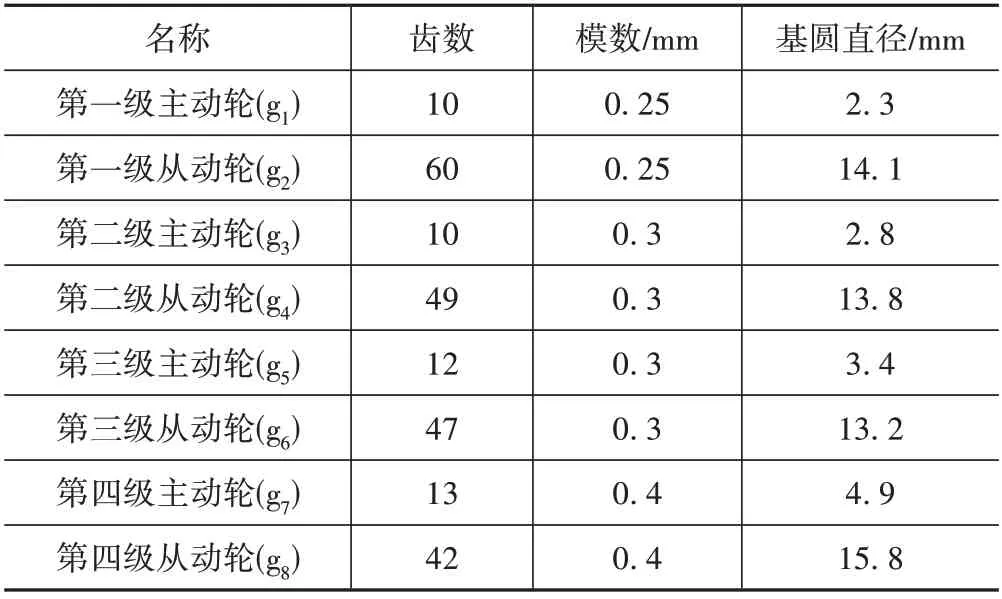
表1 多級齒輪系統基本參數Tab.1 Basic parameters of multi-stage gear system
3.1 固有頻率求解
固有頻率是系統固有特性的反映,只由系統本身決定。在忽略各彈性構件的阻尼以及內、外部激勵后,利用建立的齒輪傳動系統動力學方程,可得到系統無阻尼自由振動方程,其形式為

式中,M為質量矩陣;X為位移矩陣;K為剛度矩陣。

式中,wn為第n階固有頻率;φn為固有頻率n(n=1,2,…,26)對應的振型矢量。
求解式(14),可以得到系統固有頻率如表2所示。
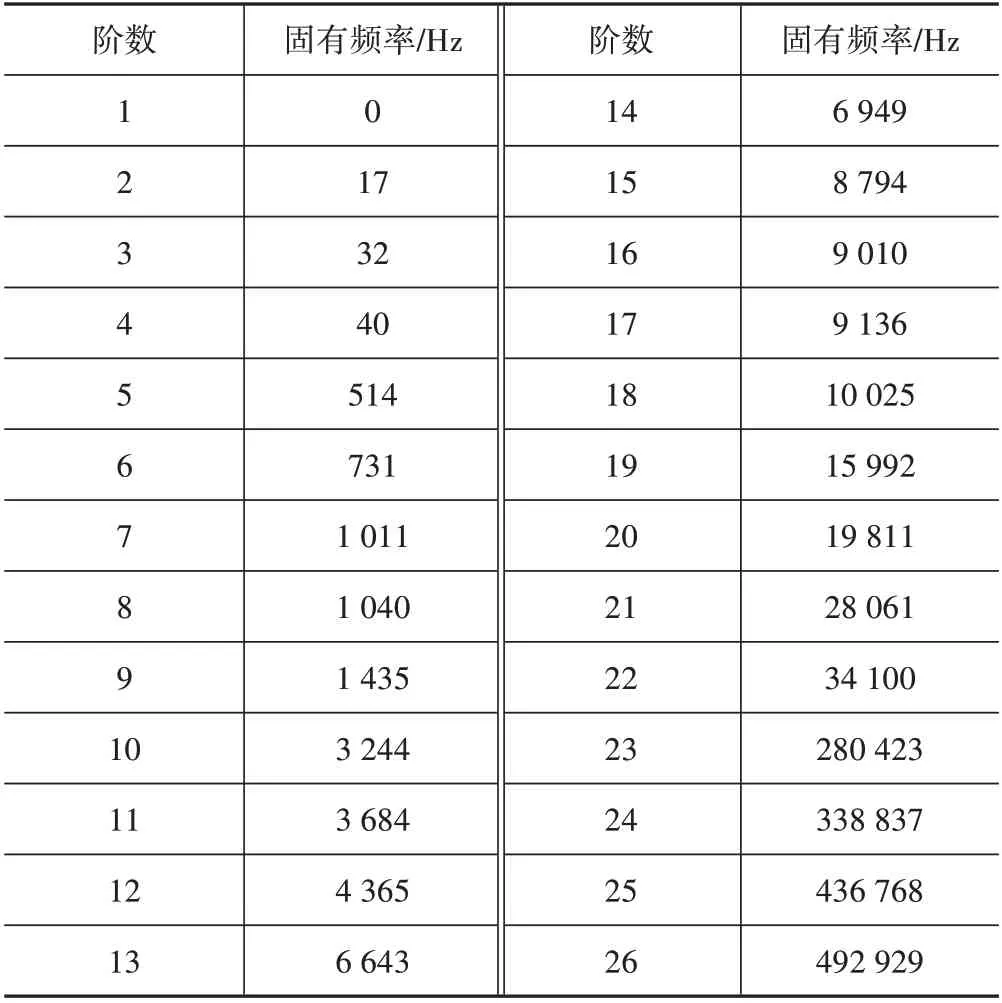
表2 系統固有頻率Tab.2 System natural frequency
3.2 模態能分析
3.2.1 模態應變能分析
模態應變能可以表示齒輪的變形程度。通過對機器人關節齒輪傳動系統進行嚙合應變能和支撐應變能分析,可以得到系統各構件振動以及形變大小,對研究系統的穩定性與可靠性有重要意義。
齒輪副嚙合應變能Uu為

式中,u表示4級齒輪副。
齒輪振動產生的支撐應變能Uf為

由式(16)可以得到整個系統的第n階固有頻率下的總應變能為
通過研究與示范,核心試驗區內氮磷肥投入量降低20%,化肥利用率提高5個百分點;畜禽糞便減少排放60%以上。技術示范區內氮磷肥投入量降低10%,化肥利用率提高3個百分點,農業面源徑流氮磷損失量減少30%。泥沙流失降低80%,徑流損失降低40%,富營養化物質的流失量控制在臨界值內;面源污染物截納率,總氮為60%、總磷為70%。農業廢棄物資源化回收率達到60%以上。

圖4所示為系統中各階固有頻率下的齒輪副嚙合應變能。可以看出,齒輪副u34在第24 階固有頻率下,齒輪副u56在第18階、第21階固有頻率下,齒輪副u78在第15階、第20階固有頻率下,均有較大嚙合應變能出現;而齒輪副在其他階數所產生的嚙合應變能較小。
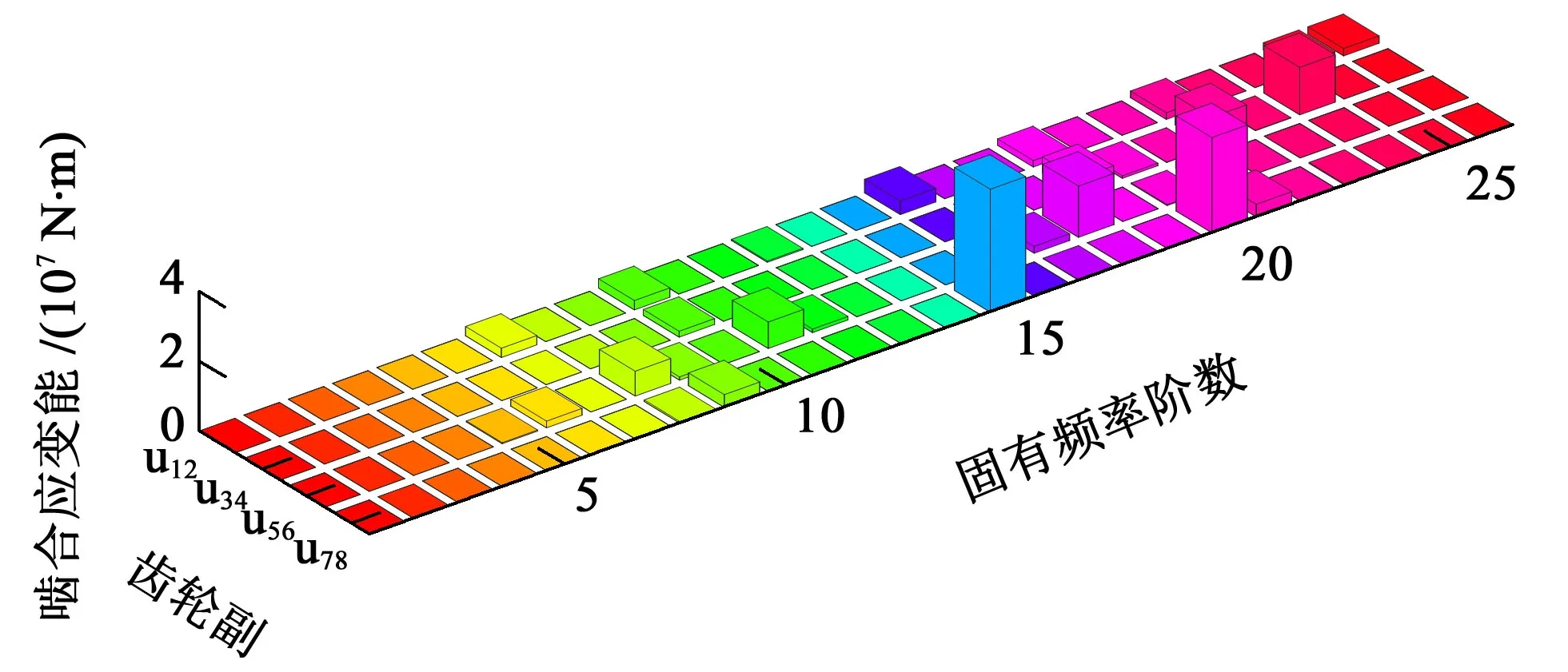
圖4 嚙合應變能Fig.4 Meshing strain energy
圖5所示為系統中各階固有頻率下的齒輪支撐應變能。可以看出,齒輪g1在第25 階、第26 階固有頻率下,齒輪g2在第7階、第10階固有頻率下,齒輪g3在第22 階固有頻率下,齒輪g4在第24 階固有頻率下,齒輪g5在第18 階固有頻率下,齒輪g6在第8 階、第11 階固有頻率下,齒輪g7在第15 階固有頻率下,齒輪g8在第3階固有頻率下,均有較大支撐應變能。

圖5 支撐應變能Fig.5 Support strain energy
圖6 所示為系統中各階固有頻率下的構件總應變能。總結可知,在系統正常運行過程中,第15 階頻率下的總應變能最大,此時齒輪傳動系統整體變形最大。
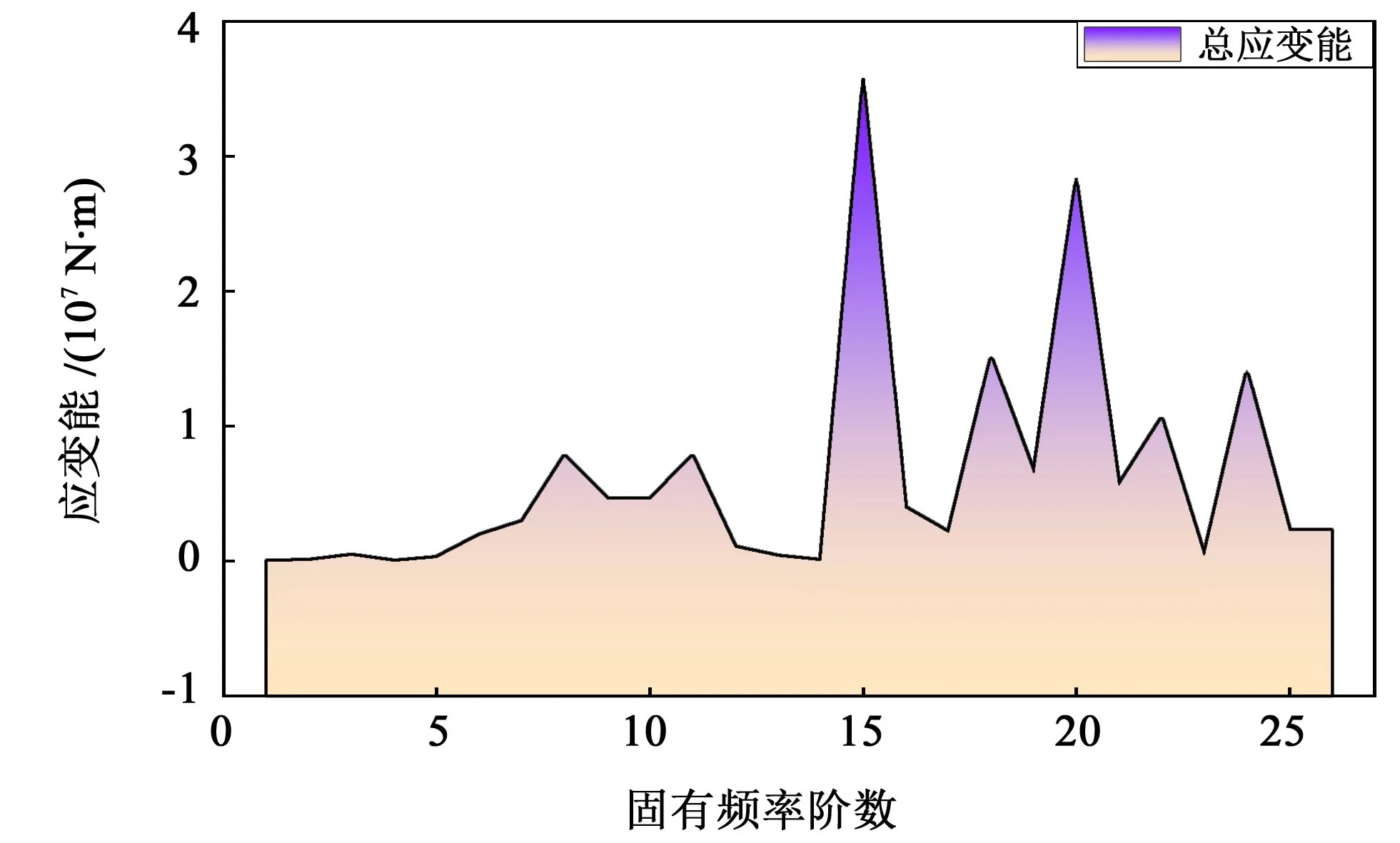
圖6 系統總應變能Fig.6 Total strain energy of system
3.2.2 模態動能分析
模態動能可以表示齒輪振動的劇烈程度,由扭轉動能和平移動能組成。
齒輪振動產生的扭轉動能Eia為

式中,λi為特征值。
齒輪振動產生的平移動能Eib為


圖7所示為齒輪傳動系統扭轉動能在各階固有頻率下的分布狀態。可以明顯看出,構件g3在第25階、第26 階固有頻率下,構件g4在第12 階固有頻率下,有很大的扭轉動能。

圖7 扭轉動能Fig.7 Torsional kinetic energy
圖8所示為系統中各階固有頻率下構件的平移動能。可以看出,構件g4在第23 階、第24 階固有頻率下有很大的平移動能。

圖8 平移動能Fig.8 Translational kinetic energy
總結可知,在該系統中,構件g3、構件g4有明顯的應變能增大現象,應注重改善其振動情況。
圖9所示為機器人關節齒輪傳動系統中各階固有頻率下的構件總動能。可以看出,在第24 階固有頻率下的系統總動能最大,齒輪傳動系統在該固有頻率下的振動最為劇烈。
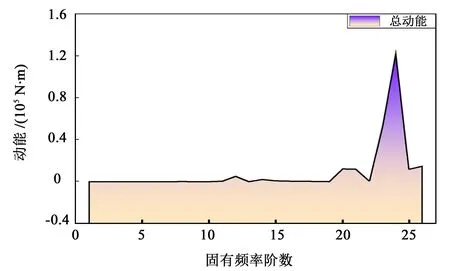
圖9 系統總動能Fig.9 Total kinetic energy of the system
4 系統參數對傳動系統固有頻率的影響
分析機器人關節齒輪傳動系統參數對固有頻率的影響,可以了解系統振動的特性,為設計機器人關節、改善齒輪傳動系統穩定性提供依據。系統的剛度和構件質量對系統固有頻率影響較大。因此,通過改變嚙合剛度、支撐剛度和構件質量,分析系統固有頻率的變化。
4.1 嚙合剛度對固有頻率的影響
通過改變系統各級齒輪副之間的嚙合剛度,保持系統中其他參數不變,觀察系統固有頻率的變化。圖10 所示為四級齒輪嚙合副固有頻率隨嚙合剛度改變而產生的變化。

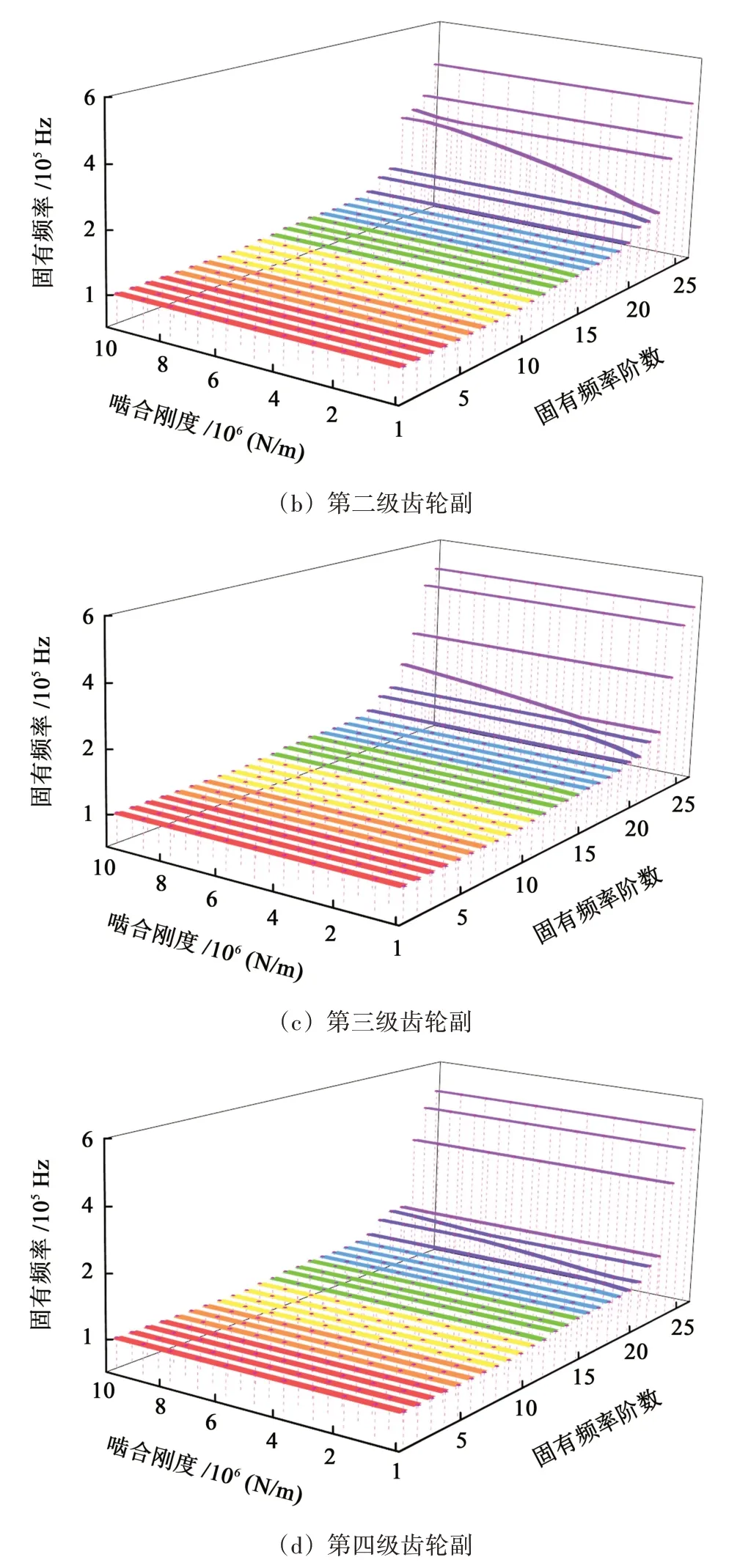
圖10 齒輪副嚙合剛度對固有頻率的影響Fig.10 Influence of meshing stiffness of gear pair on natural frequency
從圖10 中可以看出,在該系統中,第20 階至第26 階固有頻率,受齒輪副嚙合剛度變化影響明顯,個別階數下的固有頻率會出現增大現象。如圖10(a)中的第23 階、第24 階固有頻率,圖10(b)中的第23階固有頻率以及圖10(c)中的第23 階固有頻率,都出現了明顯的大幅度增大。
總結可知,在機器人關節齒輪傳動系統中,隨著齒輪副嚙合剛度增大,高階固有頻率受嚙合剛度變化影響較大,低階固有頻率受影響較小。
4.2 支撐剛度對固有頻率的影響
通過改變系統傳動軸支撐剛度,設置支撐剛度從1×106N/m 增加到1×107N/m,保持系統中其他參數不變,觀察系統固有頻率的變化。
圖11所示為傳動軸支撐剛度對固有頻率的影響。可以看出,在傳動軸支撐剛度變化時,高階固有頻率受影響較大,低價固有頻率受影響較小。其中,前兩個傳動軸固有頻率受支撐剛度影響較為明顯。由圖11(a)中可以看出,隨著輸入軸支撐剛度增加,第22 階和第23 階~第26 階固有頻率都會增大,其余階數固有頻率受影響較小。由圖11(b)中可以看出,隨著雙聯軸Ⅰ支撐剛度增加,第22 階和第25 階固有頻率增幅較為明顯;其余階次的固有頻率受影響較小。


圖11 傳動軸支撐剛度對固有頻率的影響Fig.11 Influence of transmission shaft support stiffness on natural frequency
總結以上規律可知,在機器人關節齒輪傳動系統中,高速級齒輪傳動軸相較于低速級振動情況更為劇烈。
4.3 質量對固有頻率的影響
機器人關節齒輪傳動系統中構件的質量對系統固有頻率影響較大。圖12所示為齒輪g1、齒輪g2、齒輪g3和齒輪g4質量增大時,系統固有頻率的變化規律。
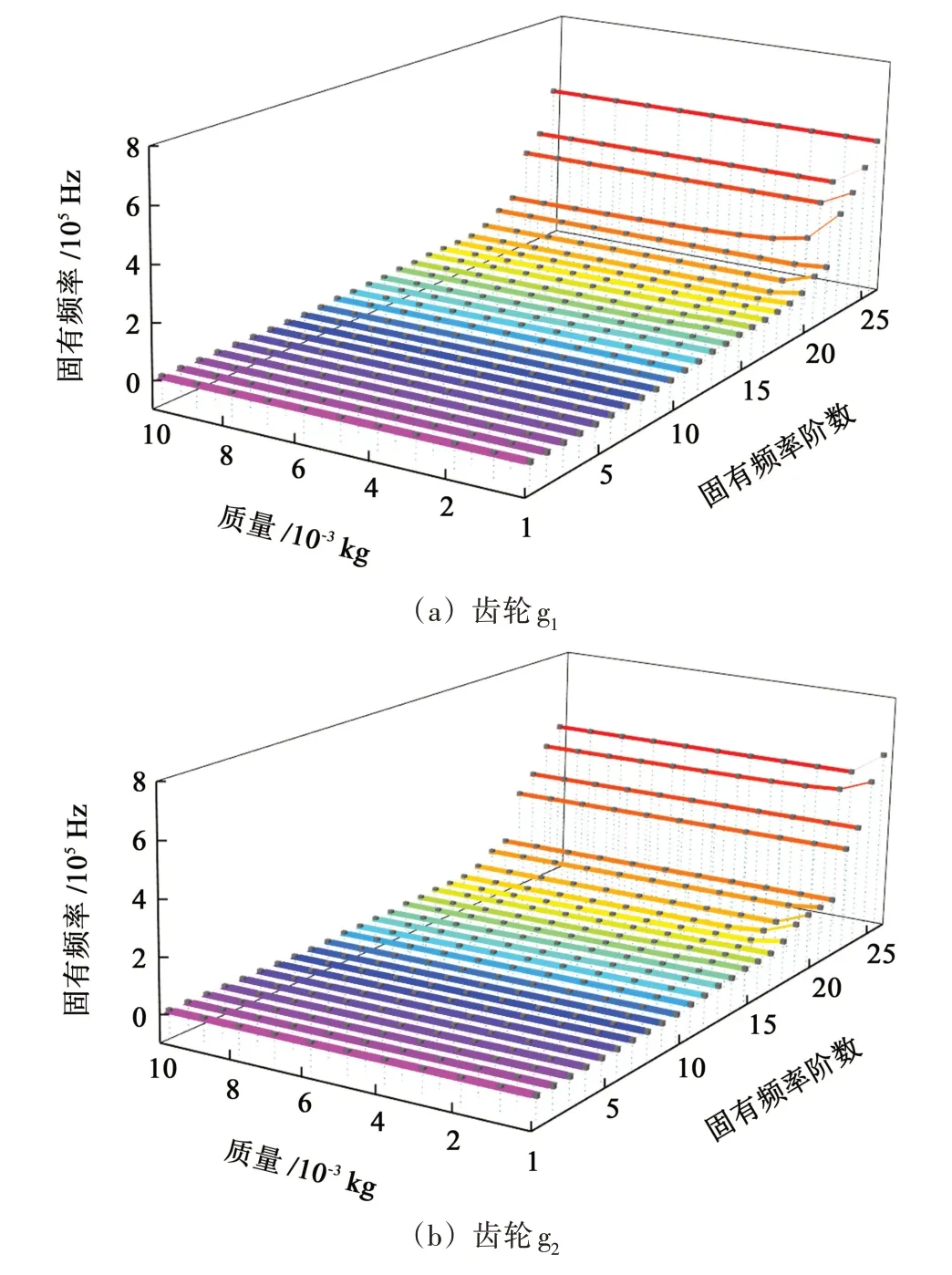
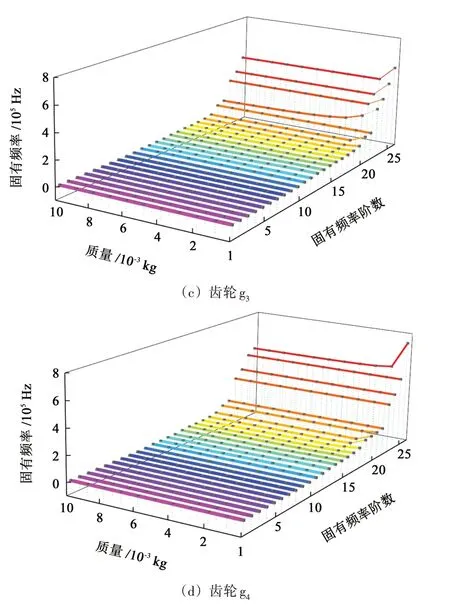
圖12 齒輪質量對固有頻率的影響Fig.12 Influence of gear mass on natural frequency
可以看出,隨著系統中齒輪質量增大,齒輪g1在第20 階~第25 階固有頻率,齒輪g2在第18 階、第19階、第20 階、第21 階、第25 階和第26 階固有頻率,齒輪g3在第20 階、第21 階和第23 階~第26 階固有頻率,齒輪g4在第18階~第19階和第26階固有頻率,均會出現前期迅速減小,減小到一定程度后基本不變的現象。
由圖12 中總結可知,構件質量對系統高階固有頻率影響較大,對低價固有頻率影響較小,而且部分高級固有頻率隨著構件質量增加,前期會迅速減小到一定程度,后面基本不再變化。
4.4 模態躍遷現象
從系統固有頻率隨剛度增加得到的變化規律曲線,可以看到模態躍遷現象。模態躍遷是指隨著系統參數的變化,固有頻率軌跡曲線會先慢慢接近,然后在某點附近又以比較大的曲率快速分離的一種現象[18]。
對于機器人關節齒輪傳動系統,隨著系統參數剛度的增加,低價固有頻率受影響較小,高價固有頻率受影響較大。因此,通過分析系統第21 階~第26 階固有頻率隨著齒輪副嚙合剛度和傳動軸支撐剛度增加,觀察系統固有頻率軌跡曲線變化,分析模態躍遷現象。
如圖13(a)所示,系統固有頻率隨著第一級齒輪副嚙合剛度不斷增大,第23 階、第24 階固有頻率曲線在點A1、點B1附近,第24 階、第25 階固有頻率曲線在點C1、點D1附近都是漸漸接近,然后以比較大的曲率快速分離,這均為模態躍遷。
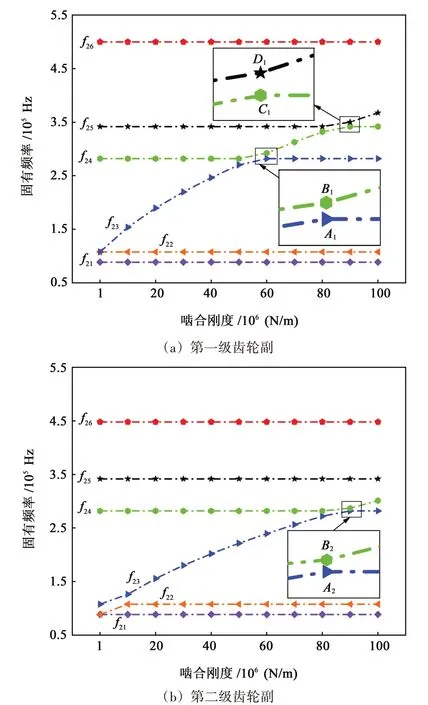
圖13 系統固有頻率隨嚙合剛度的變化規律Fig.13 Variation law of natural frequency of system with meshing stiffness
如圖13(b)所示,系統固有頻率隨著第二級齒輪副嚙合剛度不斷增大,第23 階、第24 階固有頻率曲線在點A2、點B2附近逐漸靠近后又以不同的曲率分離,發生了模態躍遷現象。
在圖14(a)中,系統固有頻率隨著輸入軸支撐剛度不斷增大,第21 階、第22 階固有頻率曲線在點A3、點B3附近逐漸靠近后,又迅速發生分離,這是出現了模態躍遷現象;第22 階固有頻率在點C3、點D3附近和第23 階固有頻率曲線漸漸接近,隨后又快速分離,這是再次發生了模態躍遷現象;而第25階、第26 階固有頻率曲線在點E3、點F3附近逐漸靠近后以不同的曲率分離,發生了模態躍遷現象。
在圖14(b)中,系統固有頻率隨著雙聯軸Ⅰ支撐剛度不斷增大,第21階、第22階固有頻率曲線在點A4、點B4附近逐漸接近后迅速分開,發生了模態躍遷現象。
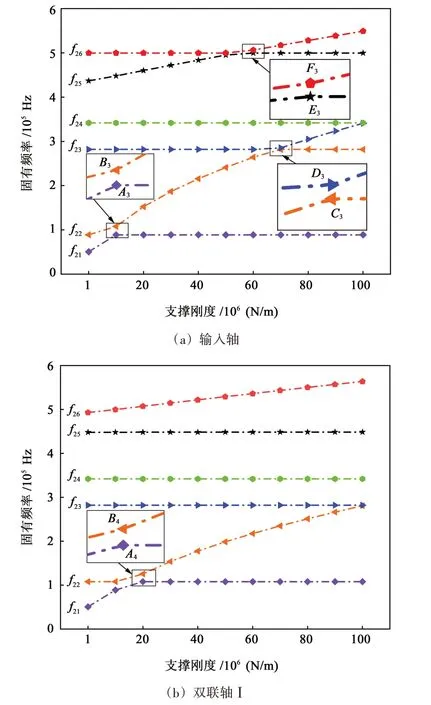
圖14 系統固有頻率隨支撐剛度的變化規律Fig.14 Variation law of natural frequency of system with support stiffness
通過對系統剛度變化過程中振動模式的對比分析,發現出現模態躍遷現象時兩組固有頻率對應的模態振型會發生交換,之后維持不變,遇到頻率接近欲相交的情況,再次躍遷。在進行機器人關節齒輪傳動系統動態設計及傳動特性的研究中,應該注意模態躍遷對其傳動性能的影響。
5 結論
為研究機器人關節齒輪傳動系統,文中首先采用集中參數法建立了動力學模型和運動微分方程,對系統的固有頻率、模態能以及系統參數對固有頻率的影響進行了分析。結論如下:
(1)針對系統模態能進行分析,可以看出在系統正常運行時,第15階固有頻率下的總應變能最大,此時齒輪傳動系統整體變形最大;在第24 階固有頻率下系統總動能最大,齒輪傳動系統在該固有頻率下的振動最為劇烈。
(2)通過改變系統的剛度和質量等參數,可以看出系統高階固有頻率受到影響較大,低階固有頻率受影響較小。支撐剛度對固有頻率的影響主要集中在系統高速級齒輪傳動軸上;質量對固有頻率的影響表現出,系統固有頻率在前期會迅速減小,到一定程度后不再變化。
(3)系統的剛度變化會使系統出現模態躍遷現象,并且在出現模態躍遷現象時兩組固有頻率對應的模態振型會發生交換,之后維持不變,遇到頻率接近欲相交的情況,會再次躍遷。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
