一套用于海底油氣分形遷移研究的實驗裝置
2022-10-21 04:09:18霍錦華張舒航秦智鵬謝佳玲李會芬門佳坤張世偉張霄朋黃為良
裝備制造技術 2022年7期
霍錦華,張舒航,秦智鵬,謝佳玲,李會芬,門佳坤,張世偉,張霄朋,黃為良
(廣西大學 機械工程學院,廣西 南寧 530000)
0 引言
隨著防砂完井技術、復合射孔優化新技術、二次儲層完井和完井保護新技術以及智能完井技術的發展[1],深海勘測已經成為人類找尋新化石能源資源的重要手段。從2012年-2018年,全球約50%的新發現的油田,約60%的新發現油氣儲量來自深海水域[2]。因此,進一步完善改進海洋油氣勘測技術對于緩解能源短缺至關重要。目前我國急需探索海底資源,但缺乏對于海床亞層油氣遷徙機理的了解,主要癥結在于不了解海床中碳氫化合流體的遷徙機理。
由于海底亞層結構的復雜性,并且油、氣、固多相流動的流動特性遠比單相流動復雜,多相流相間存在著界面效應和相對速度,所以導致多相流動過程是一個復雜多變量的非線性動態過程,其機理性研究目前還不夠充分。縱觀國內外相關多相流多孔介質方面的研究,主要的研究方向還以管道氣泡流和彈射流為主,無法模擬海底三維平面的復雜性。1979年,OLE HASSAGER研究了黏性牛頓液體中氣體上升體積和形狀的變化狀態[3];1986年TABELING等[4]在前人基礎上研究了在極小間隙下氣體指進狀態的變化,得出指狀的界面不穩定與指進速率有關;2015年,Germán Varas等[5]通過對Hele-Shaw氣體聯通后氣柱邊緣呈拋物線的流化床狀態,得出流化床的寬度隨著速率增加而變大,并且有分散逐漸集中。2019年周彥霞等[6]針對致密油藏用實驗的方法模擬了鹽水的滲析過程;在現有研究中無法直觀看出影響指進現象的因素。
為此,在文獻[7-9]的研究基礎上,設計制作一套能清楚模擬展現海底油氣遷徙過程的實驗裝置。該裝置依靠Hele-Shaw流動模型建立,可調配不同成分的懸濁液以模擬不同海床的沉積巖成分[10],通過注射泵注射氣體,用氣體的逸出過程模擬油氣的遷徙過程,并可以改變氣體流速以獲得不同情況下的實驗結果。實驗可以直觀展示油氣在不同海域海床亞層結構中滲透及遷徙的過程。這對于我國海底油氣資源勘測及開采具有重大意義,同時也對于評估不同海域油氣開發的成本與風險有借鑒意義,以及對國家海底資源“碳封存”有參考意義。
1 實驗裝置設計
1.1 實驗原理
本實驗設計的目的是通過實驗定量分析海底油氣遷徙的動力學過程,了解和預測滲透位移和行走趨勢,非固結介質中氣泡的形成和上升的力學機制。即多相流中氣體在固、液混合懸浮液中的流動過程。為達到要求,實驗即實驗裝置需滿足3種需求:
(1)模擬海底油氣遷移的基本環境與條件。由于海床亞層表面是一塊平直,且厚度有幾百米之高的巨型板塊,所以海床板塊間氣體滲透過程,完全可以簡化成一種兩無限大平板間的多相流過程。
(2)模擬呈現油氣在遷徙過程中以孔隙延展分型的形式擴大的過程。油氣在海底以油氣藏的形式儲存,隨著油氣藏的膨脹,頂部油氣壓力增大,最終突破土層的束縛在沉積巖中滲透,油氣在遷徙過程中以孔隙延展分型的形式擴大,該實驗需要模擬此延展分型的過程。
(3)模擬兩相置換過程,即為氣相在平流流動的液相中不斷擴張、置換和演替推進的過程。
因為海床亞層的氣體滲透過程極其緩慢和復雜,無法使用近似模擬的方式與真實海床對比,流體力學中可以根據雷諾數相等的原理將無法模擬的海床亞層按比例縮小,即構建縮小裝置來模擬。關于海床油氣遷徙的推演模擬實驗,目前在油氣遷徙過程模擬領域有兩種主流模型,一是Hele-Shaw cell模型,二是3D cell模型。3D cell是一種三維的模型,通常以樹脂玻璃圓柱體為容器,填充懸濁液后從底部進氣,從而形成三維的孔隙結構,但缺點在于難以觀測到其內部的孔隙分布情況。因此基于Hele-Shaw流動模型設計實驗裝置以及實驗操作步驟。Hele-Shaw流動模型由英國機械工程師Henry Selby Hele-Shaw在1898年提出,是兩個緊密間隔的平行板之間,某相流體在其他流體間的緩慢流動模型,是黏性流動stokes流的一種特例[11-13]。其原理為:假設兩平板面積為無限大,且流體為流速極小的充分發展的定常層流、黏性不可壓縮流體,則在該系統中,流速僅為垂直于板方向位置的函數,壓力僅為平行平板方向位置的函數。研究多相流之間交融現象,由于流體間黏性不同,導致流體形成分叉多行的指狀形狀。此外,在Hele-Shaw模型中,進入兩板間流體的速度滿足拋物線分布,流體的流動有旋[14]。但是由于流體垂直于平板方向的渦量分量為零,所以從平板上方觀察的時候流動是無旋的。粘度較低的相將比粘度較高的相移動或置換得更快,導致界面不穩定,從而導致出現手指狀圖案[15]。
實驗擬通過兩塊透明板形成夾層,將海底土質與油氣相互作用簡化為多孔介質與空氣的相互作用,將復雜三維現象簡化成二維,從而使實驗現象更容易被觀察,而這種夾層以及流動的填充液,恰好能夠構成Hele-Shaw流動狀態的形成條件。實驗所模擬的過程即為Hele-Shaw流動過程。在此基礎上,加入對于懸濁填充液以及氣體流動速率的控制方式,模擬不同環境和條件下的海床亞層氣體遷徙過程。可以實現Hele-Shaw流動過程的儀器被統稱為Hele-Shaw cell。
同時,實驗裝置還需能夠滿足注入填充液,保持氣密性,注射氣體。為此,本實驗裝置對主流的Hele-Shaw cell進行了改良,以實現對海底油氣遷徙狀況的適配性調整:將空氣注入到二氧化硅懸濁液中,氣相流體進入固液混合相,模擬二維平面流體在Hele-Shaw cell中的流動,觀察指進現象,通過添加不同的懸濁液模擬不同海質,以此來體現海底油氣過程的遷徙。
1.2 實驗裝置設計
完整的裝置由Hele-Shaw Cell模塊、電控模塊、監測設備與圖形處理系統組成。
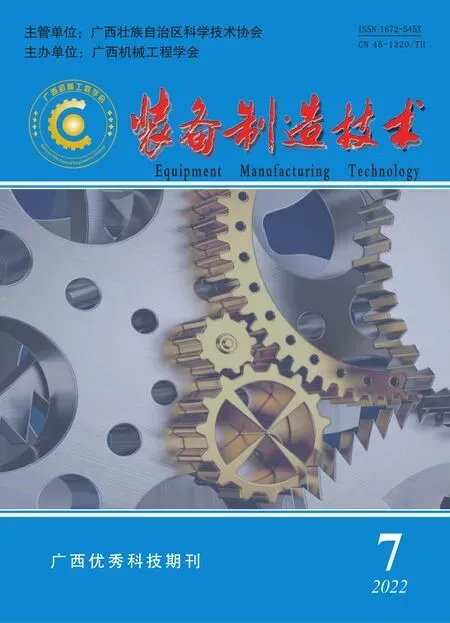
Hele-Shaw Cell模塊主要由兩塊平行的玻璃板組成(圖1)。將兩塊玻璃板(長w=350 mm,寬a=200mm,高h=10 mm)通過玻璃膠粘接在一起。為了控制間隙,兩個厚度受控的硬質塑料間隔件(厚度為1mm)被粘在兩個玻璃板之間。兩塊玻璃板中心形成流體通道,兩玻璃板一端封閉成V字形,另一端打開與大氣壓相通。同時在一層玻璃板的中心線上打通一個進氣口。Hele-Shaw模型被一個鋁框架包圍,鋁框架固定在玻璃板上,硅密封件確保模型的密封性。使用流量計連接壓力緩沖器控制氣體流量,高像素攝像機記錄實驗現象。
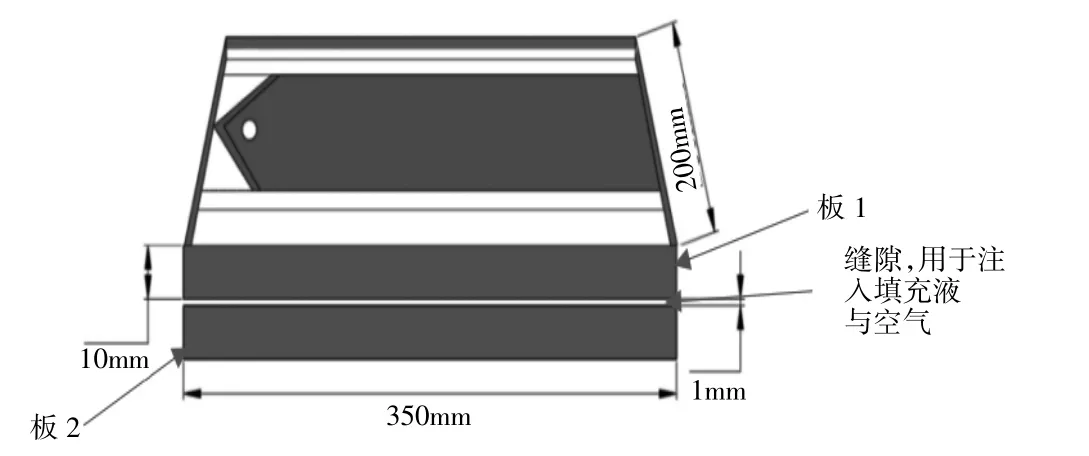
圖1 Hele-Shaw Cell模塊裝配圖
在實驗時,將空氣通入壓力緩沖器中,用流量計連接壓力緩沖器與模型的進氣口,在流量計與壓力緩沖器之間安裝電控模塊,該模塊是一個可以控制的閥門,用以調節氣體通斷,再將由流量計與數據采集器組成的檢測設備連接傳至電腦。圖像處理系統由相機及其組件和電腦組成,使用分辨率更高的相機,型號為MVXG2500GC-T,2500萬像素的攝像機安裝在距離機身30cm處的框架上,用以固定視野范圍,用LED光源板提供平行光源。攝像機與觸發信號發生器連接,再將觸發信號發生器與流量計連接,通過改變氣體流量的大小觸發攝像機,將Hele-Shaw cell模塊中二氧化硅顆粒通道的形成與變化記錄下來(實驗裝置如圖2所示)。
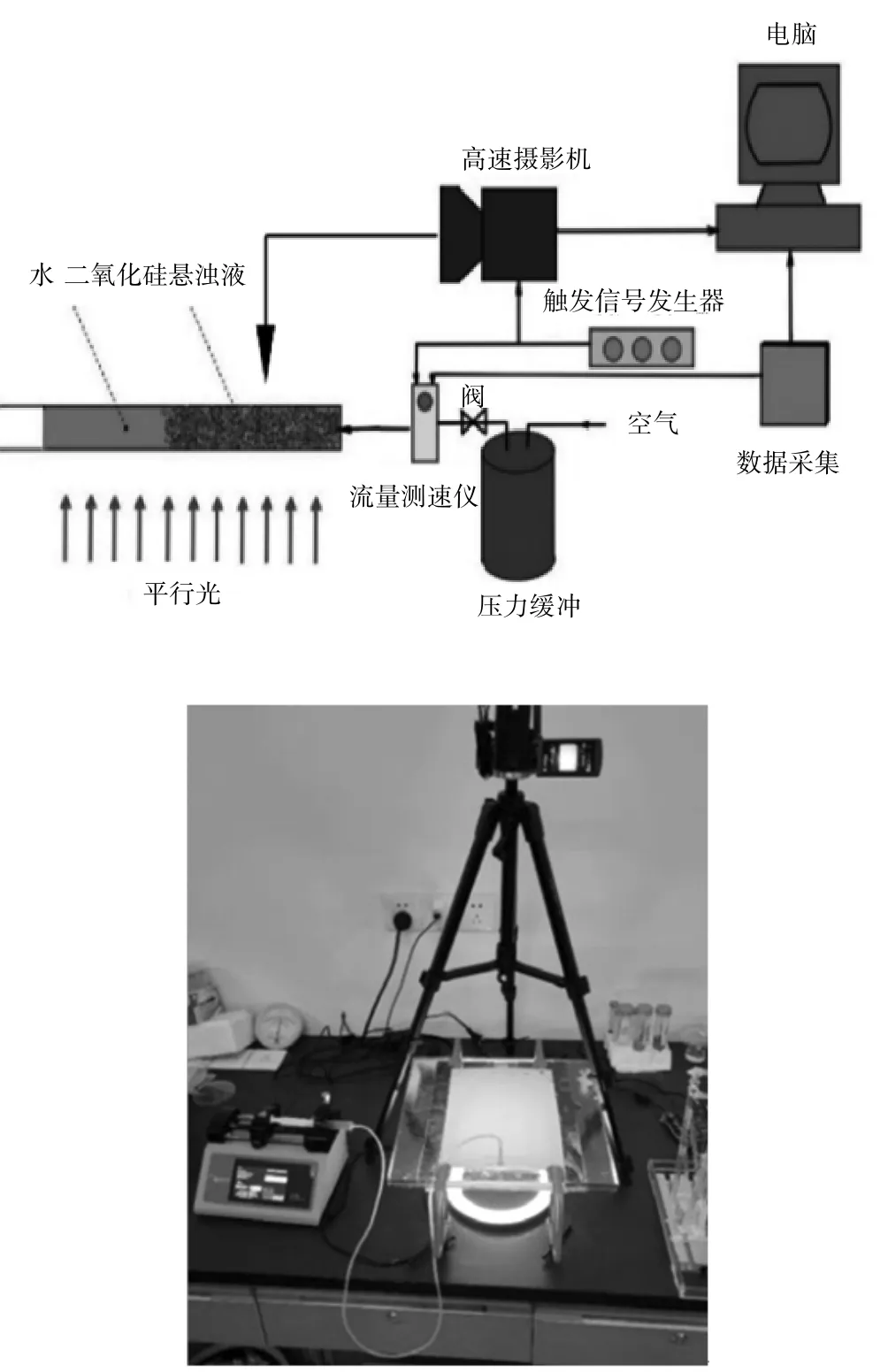
圖2 實驗裝置
使用該實驗裝置模擬不同情況下的海底油氣遷徙過程以及孔隙分布情況并直觀表現,嘗試復現海底油氣孔隙的形態并定性分析部分海床結構特征。由于Hele-Shaw cell模型受到出油孔數目與孔距半徑的影響,氣體排出率隨出油孔數目的增大而增大,隨孔距半徑的增大而降低[16],因此在此做出預測:流速越低,顆粒平均直徑越大,實驗指進現象越明顯。
2 實驗設計與結果
2.1 實驗目的
本實驗的目的是為了觀察氣體在多孔介質下的遷徙狀態,以此來與數值模型進行對比。海床是一個多孔結構,油氣遷徙的過程,本質上就是氣與液在多孔介質中的移動過程。本項目組的實驗利用二氧化硅與鹽水溶液作為填充物模擬海床的多孔結構,注入空氣模擬油氣。通過空氣的在多孔介質的遷徙過程,使油氣與通道介質的動力關系以及油氣在多孔介質中的遷徙路徑可視化。
2.2 實驗設計
由于大部分海域天然氣水合物沉積物的覆蓋層沉積物主要由粘土(<4 μm)和粉土(4~63 μm)和砂(>63 μm)組成,其中粘土、砂占到了70%以上[17],根據前人對于海洋土的研究可以得知海洋土的鈉、鎂離子較多并且普遍含有綠泥石、碳酸鹽砂層[18],所以采用氯化鈉溶液與平均直徑分別為60 μm、100 μm二氧化硅顆粒。因為二氧化硅二氧化硅的的物理性質、抗拉強度、含水率與沙土相同,其顆粒相較于其他顆粒更穩定,更容易獲得,也更經濟,且二氧化硅顆粒與飽和氯化鈉溶液混合時,對比與純凈水、酒精相混合,更容易在氯化鈉溶液中沉降,更容易出現顆粒與溶液分層,形成多孔介質。因此選擇大小可控的二氧化硅顆粒與質量分數為5%氯化鈉溶液混合,來模擬海底巖土層與海水環境。
實驗選取了兩個控制變量,分別是二氧化硅的直徑(60 μm、100 μm)與注射速率(10 ml/min、5 ml/min)。二氧化硅直徑取值基于海底沉積顆粒的平均大小上下浮動,注射速率取值源于低雷諾數,即低流速、低密度、低特征長度和高粘度系數的邊界條件,此外后續調整量級變化時只需調整倍數,取值為5、10,以便能夠在制流量和圖形差異的圖像中獲得方形的直觀圖像。驅動氣體遷徙的動力學過程的主要因素是注射流速,理論上存在一個閾值流速,使得在流速閾值范圍內氣體遷徙的指狀形狀和數量存在差異。為了方便后期計算,流速分別取0.5 ml/min、1 ml/min、5 ml/min、10 ml/min。
2.3 實驗步驟
(1)調配懸浮液。懸浮液主要成分是顆粒材料為平均直徑分別為60 μm、100 μm的二氧化硅顆粒與質量分數為3.5%NaCl溶液的混合體(二氧化硅與氯化鈉溶液的質量比為2∶1),根據實驗需要調配體積分數為48%的懸浮液。
(2)充分攪拌混合液,將顆粒與氯化鈉混合物在磁力攪拌儀上攪拌3~5min至充分混合(懸濁液為均勻的乳白色狀)。
(3)添加懸浮液。從進氣口通過注射器引入調配好的懸浮液,直到通道充滿顆粒懸浮液。
(4)注射氣體。注射泵連接注射器并從進氣口注入氣體。注射泵可以調節注射的壓力大小和氣體流量。
(5)通過設定程序定時記錄實驗照片,使用電腦將照片比對觀察不同實驗現象,得出實驗結論。
2.4 實驗現象
第一組實驗選用平均直徑為60 μm的二氧化硅顆粒,調節注射泵注射速度為10 ml/min,實驗裝置在1 min20 s前無明顯變化,在1 min20 s時,注射口出現細小裂紋并不斷擴張,但擴張范圍十分有限,出現高度約4 cm的樹枝分支(圖3),該分支在短時間后與底部斷裂變成氣泡快速浮動上升。

圖3 第一組實驗結果
第二組實驗選用平均直徑為100 μm的二氧化硅顆粒,調節注射泵注射速度為10 ml/min,實驗裝置在2 min20 s前無明顯變化,2 min20 s時,氣體開始打通注射口處多孔介質,出現指進現象,并發展為類似樹枝結構的遷徙通道,隨后該樹枝狀通道現象不斷成長至穩定(圖4),分支多且細小。該結構生長至距離玻璃板頂部約五分之一處停止生長。

圖4 第二組實驗結果
第三組實驗選用平均直徑為60 μm的二氧化硅顆粒,調節注射泵注射速度為5 ml/min,實驗裝置在2 min20 s前無明顯變化,在2 min20 s時,注射口出現細小裂紋并不斷擴張,擴張范圍相比2.2 ml/min情況下更明顯,但經過短時間擴張后,擴張達到極限,分支停止衍生,經過5 s后分支與裝置頂部空氣聯通。該組產生的樹枝分支面積較少,分支直徑較大(圖5)。
圖5 第三組實驗結果
第四組實驗選用平均直徑為100 μm的二氧化硅顆粒,調節注射泵注射速度為5 ml/min,實驗裝置在2 min20 s前無明顯變化,2 min20 s時,氣體開始打通注射口處多孔介質,出現指進現象,并發展為類似的樹枝結構通道,隨后該樹枝狀通道現象不斷成長,形成兩個大小幾乎一樣的樹枝結構,分支多且細小。左側結構生長至距離玻璃板頂部約二分之一處停止生長,而右側結構成長至聯通裝置頂部(圖6),整個聯通過程約18 s。
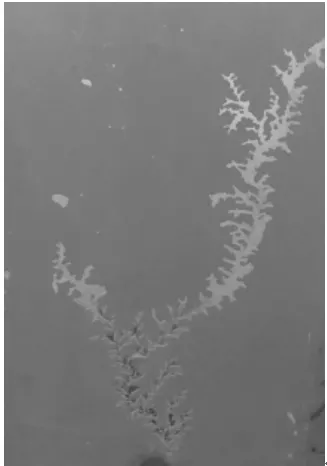
圖6 第四組實驗結果
2.5 實驗結果與分析
注射空氣,觀察空氣在填充物中的演變過程。注入的空氣以一種緩慢的、準連續的指進現象變化,在這個過程中,指進通道側向分支和隨機生長方向產生了一個樹形結構(圖7)。由前進界面匯編而成的壓實顆粒前緣沿整個前緣可見為一條狹窄的暗帶。由于樹枝結構內部的空氣壓力與界面上的摩擦力之間的力平衡,會出現一個特征樹枝寬度。
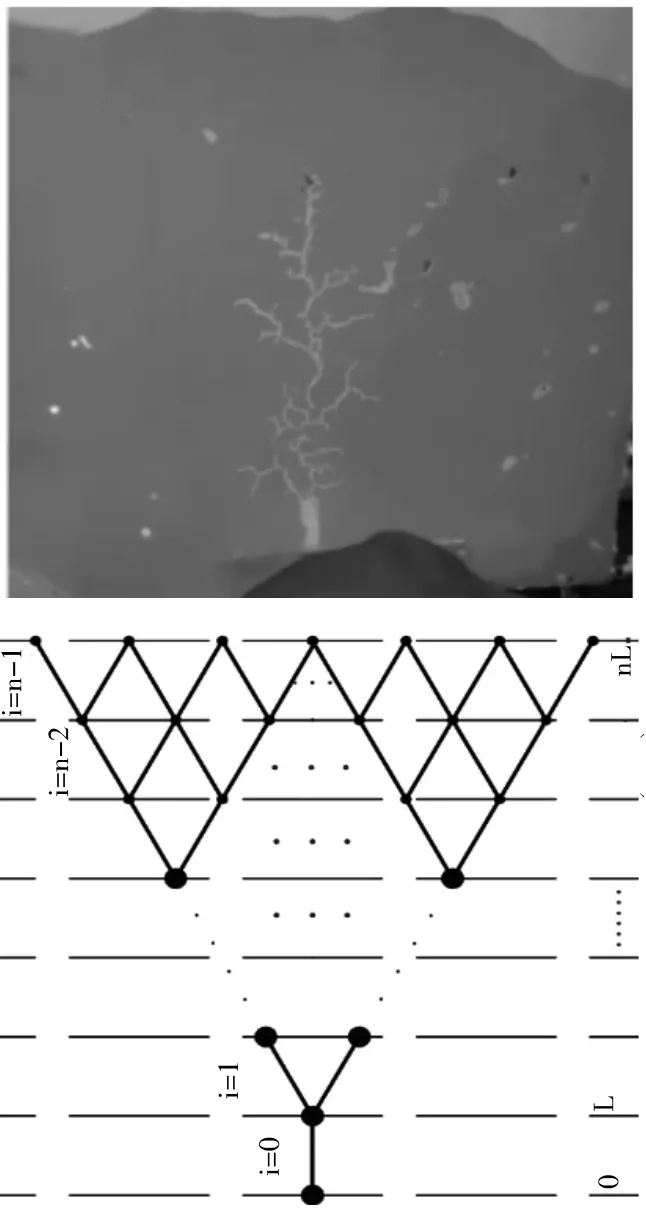
圖7 樹狀分形形態
在不同條件下進行了多次對比實驗,使用不同的填充液去模擬不同的海床亞層結構,得到的油氣遷徙路徑都具有相似的樹狀結構。以不同的注射速率進行實驗,得到的樹狀通道雖然在寬度上有差異,但在形狀上都為樹狀。同時,不同實驗條件下樹狀結構整體與局部上具有相似性。再者,為了避免由于操作人員的主觀性與事件偶然性對實驗結果的影響,獨立進行了大量實驗,得到的結果都為相同。由此可以看出,油氣遷徙的樹狀結構遷徙通道不受空間和時間的約束,符合分形理論[19]中的標度不變性原則,證實了該實驗模型的準確性和可行性。
實驗發現,樹枝結構不斷演化的過程中隨著前端空氣被恒定的、緩慢的活塞驅動所壓縮,空氣壓力線性增加。隨著壓力的增加,前緣最薄弱的地方最終屈服,壓縮空氣在徑向擴張之前通過狹窄的頸部迅速侵入。前端空氣減壓后,膨脹會減慢并停止。堆積在界面上的顆粒狀物質沉淀下來,并逐漸壓縮成一個堵塞的前端,在這里,最薄弱的地方再次決定了下一個氣泡的位置。在不斷前進、代替、壓縮、破裂過程中,空氣在填充物中不斷樹狀型前進(如圖8所示)。這主要是因為壓力差為遷徙驅動力,壓力下降最快的方向為遷徙的優先方向,豎向遷徙趨勢大于橫向遷徙趨勢[20]。
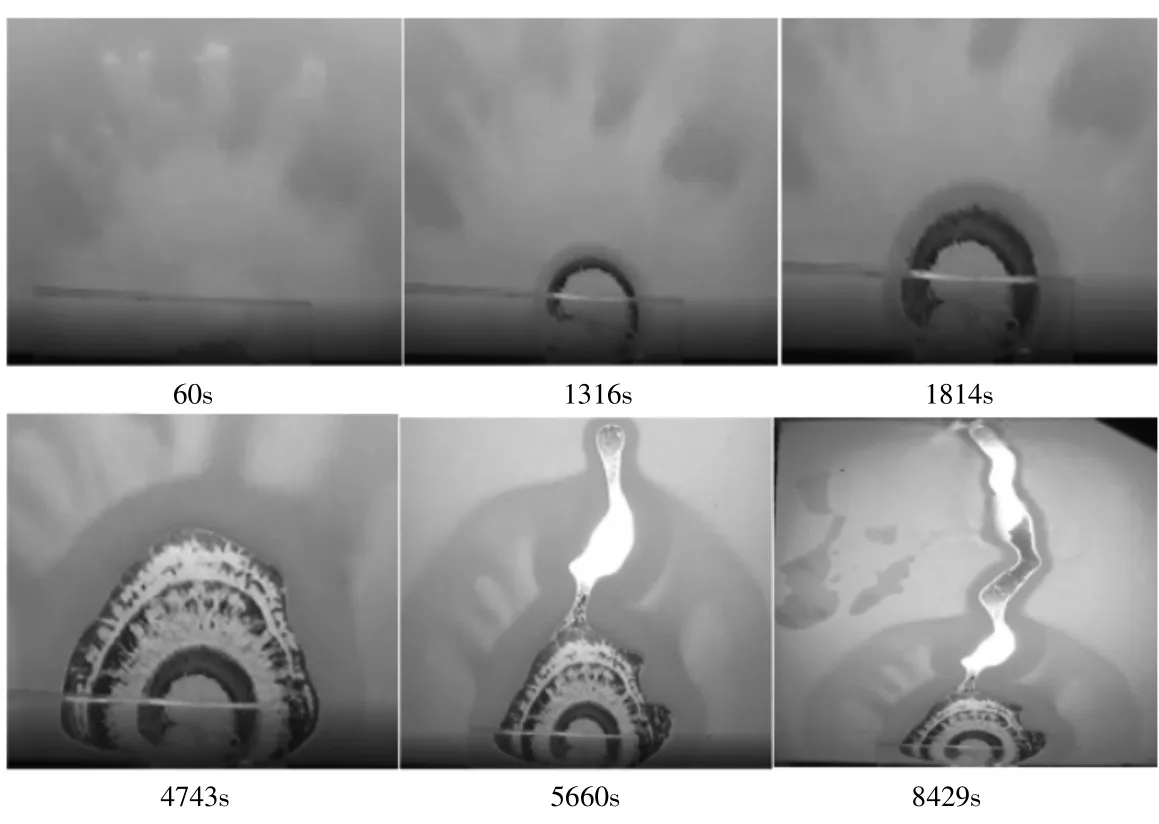
圖8 隨時間演化的粘性指狀結構
在真實的油氣遷徙過程中往往以低速率進行,低速率意味著靜態過程,樹枝周圍環境的影響可以忽略不計,從而有效地將樹枝與周圍環境隔開。因此,特征指標與通道寬度無關,僅受到表面張力和材料屈服應力的影響。屈服應力和摩擦流體都分別受與屈服應力和靜摩擦相關的閾限動力學控[21]。
2.5.1 注射速度對指進現象的影響
在相同二氧化硅平均直徑的條件下,注射速度越慢,出現指進現象所需要的注射量越少,在注射速度過快的情況下,甚至無法出現明顯指進現象,僅僅是在注射口出現短暫細小的指進現象,之后便成為一個個獨立的氣泡擴散。將空氣注射速度增加到一個閾值以后,動態會發生顯著變化,出現不同的形態(圖9)。界面的發展不再緩慢和連續,相反,它的運動變得高度間歇性,前端在很長一段時間內保持靜止,隨后,粒狀流體混合物突然被氣泡形狀的空氣爆發所取代,位移繼續逐泡前進。
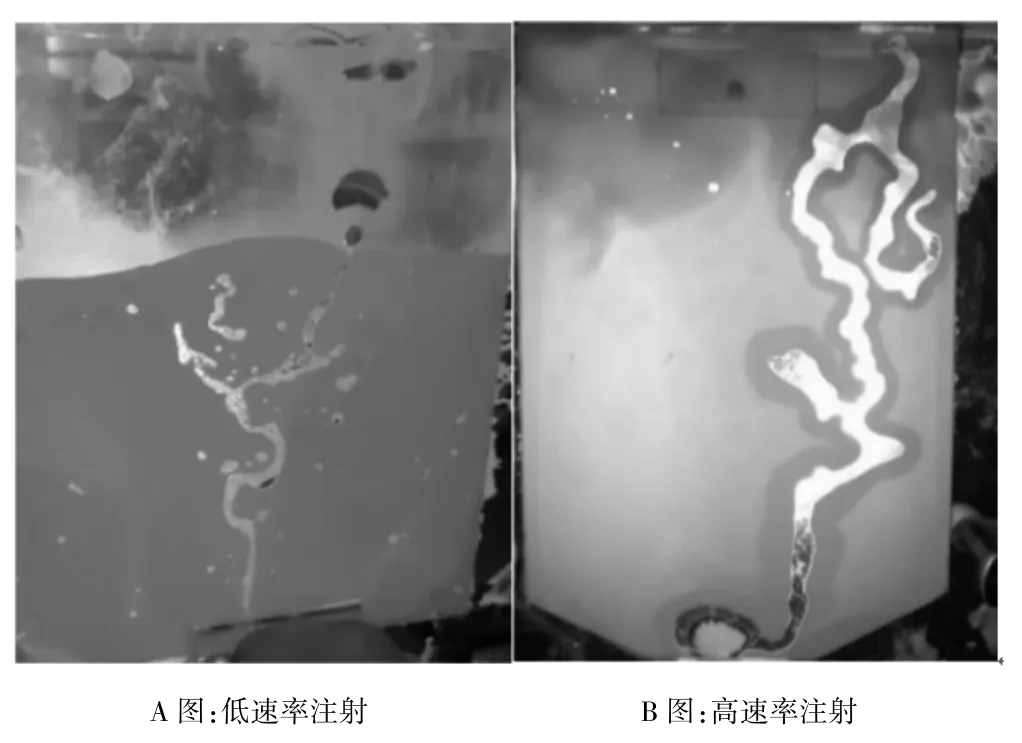
圖9 蠕蟲形態
通過分析得知注射速度越大,氣體內部的壓力越大。壓力增大,使氣體打破內部壓力平衡,達到多孔介質的屈服壓力,克服二氧化硅顆粒的摩擦力,克服毛細管力與邊緣粘滯力所需要的時間更短從而使樹狀結構發生改變。
2.5.2 二氧化硅直徑對指進現象的影響
通過對比多組實驗現象,最終發現平均直徑為100 μm的二氧化硅比平均直徑為60 μm的二氧化硅更容易產生更大的樹枝結構。通過電鏡觀測多孔介質結構并分析多孔介質顯微成像圖(圖10),得知增大二氧化硅顆粒大小,會導致多孔介質中的空隙增大,較大的空隙更有利于空氣突破顆粒間的摩擦力,有更多的路徑能夠被輕易打破平衡,從而形成更多的樹枝狀分支。并且由于產生的樹枝分支數量多、面積大,氣體內部壓力的增大不容易打破分支內部壓力與外部張力、毛細管力之間的平衡,有利于分支結構成長發展壯大,且不會使得通道突然斷裂形成氣泡。
該實驗對我國南海北部神狐海域天然氣儲藏海床結構進行了模擬并與該海域實際勘測的地震資料圖[22]進行了對比。對比結果如圖11所示。
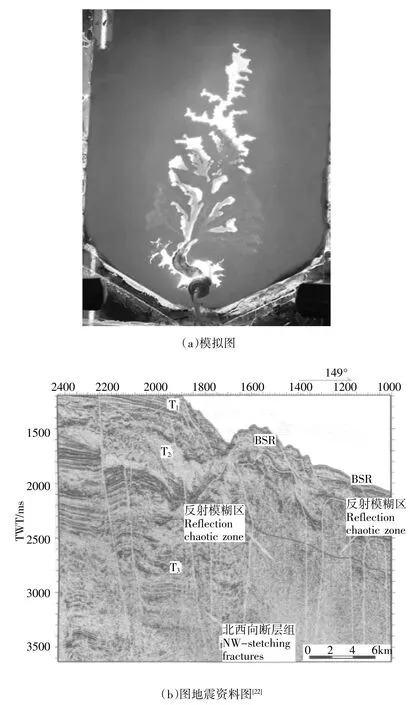
圖11 神狐海域結構
從地震資料圖可以看出地震剖面上呈直立的、上小下大的煙囪狀通道,局部橫向擴張呈囊狀、樹枝狀,底部結構刺穿各沉積層最后聯通表面釋放油氣。通過實驗模擬得到了與之相符合的結構,實驗所得的樹枝狀結構,從底部開始發育經歷縱向、橫向發展的過程,最后與上部聯通形成上小下大的油氣遷徙通道。綜合對比,該模型成功模擬了此海域的油氣遷徙過程以及該海域的海床亞層結構。
3 結語
本實驗裝置根據氣體和流體在兩平板間的流動特性,在Hele-Shaw模型和分形理論的基礎上設計制作,能模擬不同情況下的海底油氣遷徙過程以及孔隙分布情況并直觀表現。實驗表明:(1)該裝置能成功復現海底油氣遷徙孔隙的形態,如:樹狀形態、蠕蟲形態、粘性指形態等。(2)通過改變控制參數,該裝置能模擬不同海域不同海底亞層結構狀態下油氣遷徙的路徑及發展,實驗結論對于我國海底油氣資源勘測及開采具有參考意義。(3)該實驗能為后續對于油氣遷徙過程的分析研究提供理論研究依據和實驗設計思路,具有一定的實用意義和推廣價值。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中成藥(2018年2期)2018-05-09 07:19:43
天津農學院學報(2016年2期)2016-12-01 05:40:05
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:40