基于GNSS的預制箱梁橋吊裝施工新技術
2022-10-20 01:49:28朱興龍
建材世界 2022年5期
朱興龍,彭 冀
(1.深圳市市政工程總公司,深圳 518000;2.武漢理工大學土木工程與建筑學院,武漢 430070)
近年來,隨著經濟社會的不斷發展與人口總量的持續增長,我國的交通運輸壓力急劇增大。為解決交通擁堵問題,各級政府規劃、新建了大量市政道路與公路[1],這些相關公路的建設也催生了大量新建橋梁的需求。預制箱梁橋作為中小跨徑橋梁建設應用最為廣泛的橋型之一,其現有的施工工藝仍存在著一定的不足,該文對其吊裝施工技術發展現狀與問題進行分析,從施工控制管理與施工監測方面提出基于GNSS的施工監測的技術方案。
1 預制箱梁吊裝施工技術發展現狀
早在20世紀50年代,我國就已經開始研究預應力混凝土技術,并于1956年在隴海線新沂河上建成了國內第一座預應力混凝土鐵路橋,此后,預制混凝土梁在橋梁建設中得到了廣泛的應用[2]。在橋梁的工程建設中,施工技術水平的高低常常起著至關重大的作用,采用合理的施工技術不僅能提高施工效率,降低工程費用,更是實現安全生產的重要保障。因此,許多學者與工程技術人員在工程實踐的基礎上,對預制箱梁的吊裝施工不斷地進行技術創新,主要體現在各類大型機械化運、架梁設備的研究應用上。
現如今,按照架梁施工的工藝類別進行劃分,有針對地上架設、水上架設以及高空架設的各類技術方法,比較常見的如架橋機安裝法、自行式吊車安裝法、跨墩龍門吊安裝法和浮運架設法等。在海面上或深水上修建橋梁時,通常使用可回轉的伸臂式浮吊,配備有大型浮吊船的情況下,其吊裝能力強大、功效高。當橋高有限、架梁孔數多且在線路兩側鋪設吊車行走軌道較為方便時,可選用跨墩門式吊車法進行架梁。架橋機是針對箱梁吊裝施工專門研發出來的起重設備,采用了微調控制結構,其吊裝動作平穩精準,能實現一次落梁到位,并且具有可自行跨孔、不受橋下水深與通行限制等優點,在實際工程中得到了廣泛應用,其缺點是往往需要進行復雜的機械結構組裝施工,對設備及技術工種的需求相對較高。當單片梁架設重量較小且施工場地相對平坦堅實時,自行式吊車架梁法是一種很好的補充方法。自行式吊車本身具有動力,運轉靈活,既能在橋下架梁,也能行駛至已架設的橋段上進行高空吊裝作業,不僅對架設設備、技術工種的需求較低,而且架設速度快、保護交通效果良好,可起到縮短工期的效果。除上述幾類常見的吊裝施工技術外,還有多種靈活的方式可以選擇。日新月異的機械化施工技術也為橋梁工程的發展提供了更為廣闊的空間。
2 現存問題分析與對策
不論采用何種起重機具進行架梁,整個架梁作業通常嚴格按照試吊→起吊→提梁→移梁就位→落梁的工序進行,其總體目標是將主梁平穩、安全、精準地安放到目標梁位,如圖1所示。
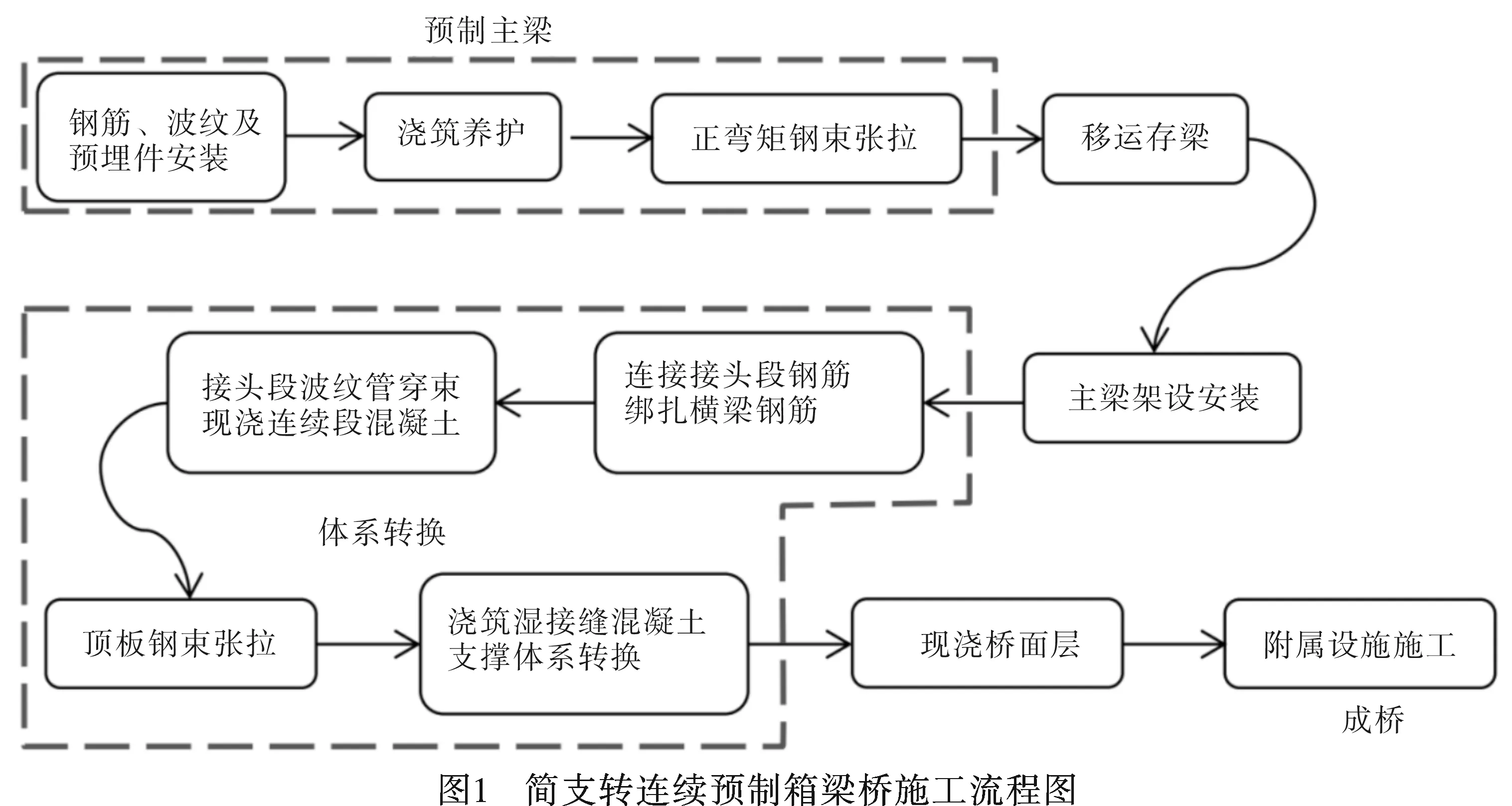
在傳統的施工工藝里,為保證最終落梁位置的準確性,需事先在已驗收合格的蓋梁上對箱梁的安裝邊線、中軸延長線以及梁端線進行放樣并標畫出來,同時在梁端上也標畫出梁體中軸線,待箱梁移運至目標梁位上方后保持懸停,由指揮人員反復校核梁體與標線的重合情況來調整落梁。該方法存在如下弊端:
1)箱梁的吊運安裝主要依靠人工監控指揮,受指揮者所處位置、視角、距離以及現場照明條件的影響,指揮移梁與落梁就位時將不可避免產生一定的偏差。
2)指揮人員與操作人員通過語言溝通合作進行架梁作業,過程中往往需要進行多次、反復調整以保證箱梁準確地安裝到目標位置,施工效率十分低下。
3)在進行吊裝作業時,目標孔跨兩端各需要1個以上的指揮人員,人力成本較高。
4)指揮人員往往需要進行長時間的高空作業,并且作業區域離安裝點位較近,具有很大的安全隱患。
根據住建部發布的《2019年房屋市政工程生產安全事故情況通報》[3]:2019年,房屋市政工程生產安全事故按照事故類型劃分,高處墜落事故占比最高,共發生415起,占事故總數的53.69%;因起重機械傷害造成事故42起,占總數的5.43%。通報對生產安全較大及以上事故也按類型進行了統計,其中因起重機械傷害造成的事故有7起,占比高達30.43%。以上數據也表明,預制構件吊裝是一項危險性較高的施工作業,吊裝指揮人員不僅面臨著較大的高空墜落風險,當發生起重傷害事故時后果也比較嚴重,容易造成較大的人員傷亡及財產損失。
實際上,裝配式橋梁因采用了標準化的設計與工廠化的生產工藝,不僅構件類型齊全,生產質量有保證,而且同一類型的構件外形尺寸固定,內部構造相似,更適合采用信息化的施工方案。近年來,有不少學者開始研究將GNSS定位技術應用于指導吊裝施工,該文在閱讀大量相關文獻的基礎上進行創新,提出建立一套基于GNSS定位技術的施工監測系統來指導實際吊裝施工,以提高施工效率、安全性與準確性。
3 系統方案設計
系統的總體框架設計以實際應用為目標,以功能需求為基礎,結合預制箱梁橋施工工藝的特點,采用動態、直觀、高效的設計原則,形成了基于軟硬件集成的多層邏輯架構,如圖2所示。
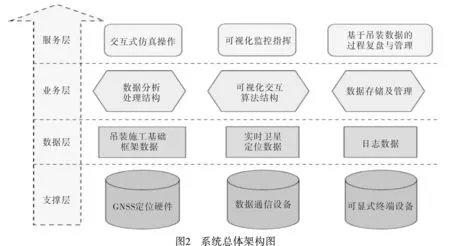
基于總體構架,結合箱梁橋施工階段的整體過程,以及需要的硬件和軟件進行系統的方案分析設計,從而完成基于GNSS定位技術的預制箱梁的吊裝施工過程的方案設計。
3.1 預制箱梁橋施工階段分析
系統主要依靠安裝在梁體上的GNSS定位設備來接收衛星定位數據,結合系統軟件的內部算法計算出梁體的實時空間位置,從而實現對預制箱梁吊裝施工的監控指揮。在確定定位硬件在梁體上的安裝方案后,箱梁吊裝就位時接收機的目標坐標可以在施工定位圖上換算求出,但考慮到箱梁在預制、存梁階段受一期恒載與鋼束預應力的作用會產生形變[4],若僅以其設計尺寸參數來計算接收機的目標坐標,必然會存在著一定的誤差,從而影響到最終的安裝精度。因此,運用有限元方法對預制混凝土箱形梁橋進行施工階段分析,掌握其在各階段的受力變形特性具有重要意義,能夠為后續形成系統的吊裝定位計算理論提供重要依據。施工階段分析主要內容是不同標準跨徑的各類梁片在任意存梁周期下的變形情況。
3.2 系統硬件設計
硬件是整個系統得以運行的基礎與支撐,主要包含GNSS定位硬件,必要的數據通信設備以及具有交互接口的可顯示用戶終端。其中硬件的集成方案與GNSS定位設備在梁體上的安裝布置方案是研究的關鍵。為保證系統指揮吊裝施工的時效性與精度,采用了GNSS RTK實時動態定位技術,因此定位硬件中既包含了安裝于梁體上的流動站接收機,也包括安裝在施工現場的基準站接收機來提供實時差分信號。系統配備了3臺流動站接收機并分置于梁體的固定安裝點位上,通過實時解算接收機天線構成的非共線基線矢量來確定梁體的吊裝姿態[5]。最后將所有的硬件設備通過數據鏈路聯系在一起集成為系統的硬件子系統。
3.3 系統軟件設計
系統開發的預期效果是:施工人員在操作大型起重機械時,能夠根據系統所反饋的實時監控信息調整自己的操作,以便讓預制構件能夠平穩、安全、精準地移運到目標位置。因此,監控信息如果太過于復雜和數據化,反而會影響施工人員原本的操作,系統的實用性就會大打折扣。故在硬件監測系統的基礎上,開發一款與之相適應的動態仿真軟件,軟件內部核心算法能夠對所獲取到的實時定位數據進行快速分析,然后通過仿真界面以圖形化的形式直觀地向施工人員提供操作指引。同時,軟件具有直觀、簡潔、人性化的用戶圖形界面與操作模塊,用戶可以方便地定義必要的施工參數并進行實時仿真操控,輕松獲取有效的施工信息。
4 結 語
預制箱梁橋的廣泛應用為我國公路建設與橋梁事業的發展提供了巨大推力與保障,其施工技術也在實踐中得到不斷創新。但現有的吊裝施工技術中仍存在著一定的不足,仍依賴于人工實時觀察與指揮,不僅效率低下,而且存在著較大的安全隱患。該文創新式地提出一套基于GNSS監控系統來指揮架梁施工的新技術,通過對預制箱梁橋施工階段的整體過程的分析,建立包含GNSS定位硬件和關聯系統軟件的研究,對基于此方案的新型吊裝技術進行了完整的闡述。此項新技術及其實施方案將極大地改進現有箱梁橋的吊裝技術,促進更加安全精確的吊裝方案的發展。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
建材發展導向(2021年14期)2021-08-23 00:57:42
建材發展導向(2021年9期)2021-07-16 07:11:36
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
建筑科技(2018年6期)2018-08-30 03:41:12
鐵道學報(2018年5期)2018-06-21 06:21:22
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34