數據驅動的拖掛房車質心安全域分析
2022-10-20 00:57:48李寶軍高世哲高妍靳春寧胡平
計算機輔助工程 2022年3期
李寶軍,高世哲,高妍,靳春寧,胡平
(大連理工大學 運載工程與力學學部 汽車工程學院,遼寧 大連 116024)
0 引 言
自駕游的興起帶動房車市場的發展,拖掛房車憑借其性價比高等優勢受到越來越多旅行愛好者的青睞。拖掛房車能夠在有限空間內解決旅行者的衣食住行等問題,因此房車中會放置多種必需物品,物品擺放不可避免地具有較大隨意性。房車中通常還會配備多個水箱,在房車行使過程中水會流動,因此拖掛房車的質心位置變化具有較大的不確定性。質心位置變化會影響房車底盤結構的安全性,且通常情況下底盤結構損壞前不易感知、損壞后不易修復,影響拖掛房車的安全性和旅居生活質量。

上述研究表明,車輛質心位置變化不僅會影響行駛安全,而且會影響車輛結構的安全性。研究質心的最佳分布范圍,能夠提升車輛安全性。
1 拖掛房車質心安全域
基于某款額定載質量為1.4 t的拖掛房車,構建質心安全域。安全系數
(1)
式中:為材料的屈服強度;為結構的最大應力。
安全系數越大說明結構越安全。安全域是指底盤結構的安全系數均大于安全系數閾值的區域,可以根據使用者的需求和材料要求進行設定。
拖掛房車質心安全域的構建過程見圖1。首先,構建拖掛房車的有限元模型,通過批量操作設置種工況(=1,2,…,)的參數,改變質心坐標,構建仿真數據集;然后,使用仿真數據集構建神經網絡模型,根據需求設置安全系數閾值和質心采樣點集{}(=1,2,…,),輸入神經網絡并預測安全系數,獲取安全系數=的點集{s,}(=1,2,…,),擬合即可得到安全邊界曲面,將曲面沿軸向下拉伸到平面,即可得到工況下的質心安全域;最后,對種工況下求得的安全域{,,…,}進行布爾求交運算,即可得到拖掛房車的質心安全域及安全邊界。
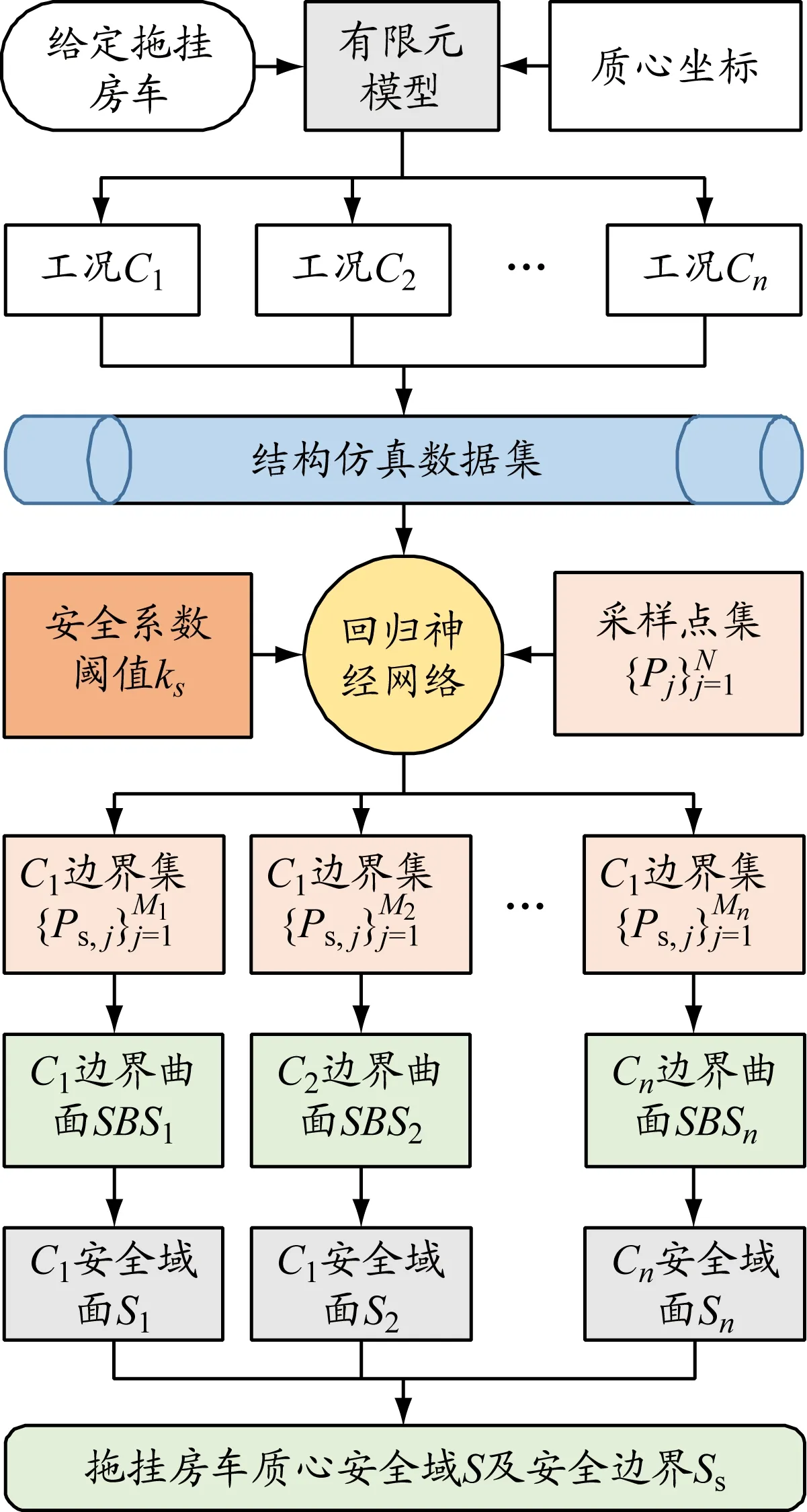
圖1 拖掛房車質心安全域的構建過程
構建拖掛房車質心的安全域,能夠為其空間布局和物品擺放提供指導,保證拖掛房車的使用安全和行駛安全。
2 構建拖掛房車底盤有限元模型
2.1 拖掛房車底盤建模
以車廂地板中心位置作為坐標原點,車輛行駛方向定義為向正方向,車輛行駛方向的左側定義為向正方向,地板上方定義為向正方向,建立拖掛房車的坐標系。將現有某款拖掛房車底盤幾何模型導入HyperMesh中進行前處理,建立有限元模型,并使用OptiStruct進行有限元計算。底盤的縱梁和橫梁均為鋼板沖壓件,采用殼單元進行簡化;車廂內的重物通過質量點模擬,并使用RBE3單元與車廂地板連接。通過施加全局加速度的方式施加載荷,取為9.81 m/s,向量(,,)表示加速度;邊界條件通過約束位移的方式施加。
拖掛房車車廂通常由三明治板組合而成,中間有鋁骨架填充,以提高車廂的強度和剛度。建立車廂骨架有限元模型,并將鋼制底盤與鋁制骨架進行組裝。材料力學性能參數通過金屬拉伸試驗得到,具體見表1。某拖掛房車底盤有限元模型見圖2,因為僅需要對底盤進行應力分析,所以后處理時隱藏車廂骨架。
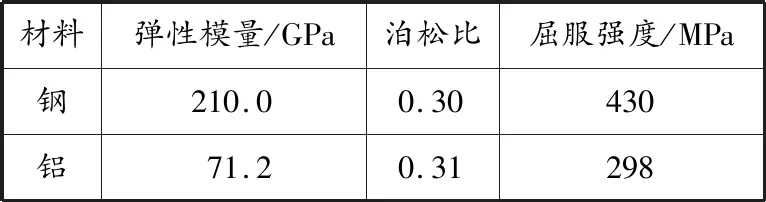
表 1 拖掛房車底盤材料力學性能
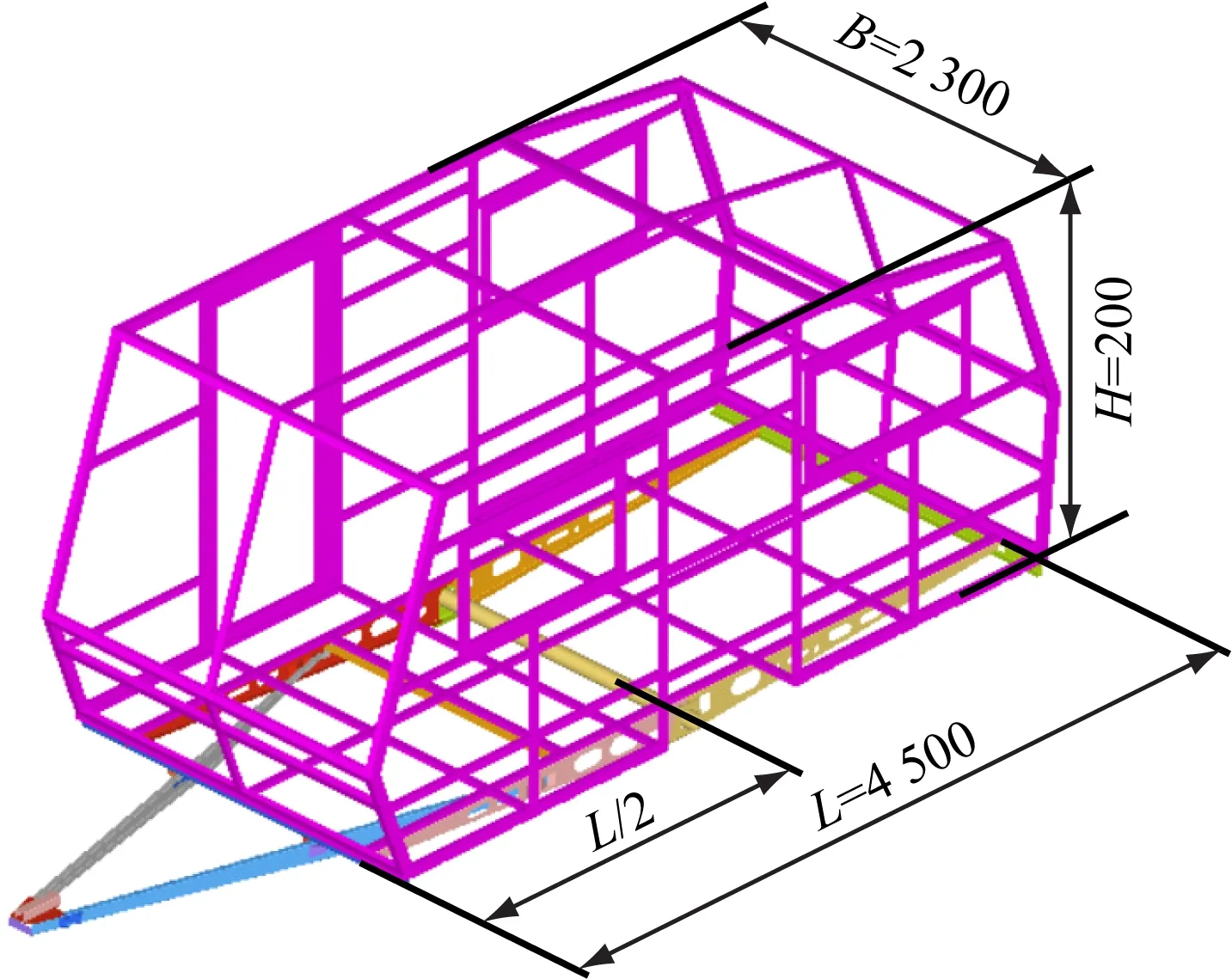
圖2 某拖掛房車底盤有限元模型,mm
2.2 載荷及邊界條件
道路行駛工況不斷變化,拖掛房車底盤的受力狀態也會隨之改變。在有限元分析時,根據載荷和邊界約束條件,考慮4種底盤受力工況,即彎曲工況、制動工況、轉向工況和混合工況。
2.2.1 彎曲工況
1975年2月25-28日召開的第一屆印尼語言政策研討會強調,印尼語作為國民語言的功能如下:國民自尊象征;國民身份象征;國民民族團結象征;各民族各地區凝聚的紐帶。該研討會也強調了印尼語作為官方語言的4個功能:國家官方語言;教育機構的教學用語;全國政府部門的行政語言;民族文化及科技發展的官方語言。總之,印尼語在全國各領域處于至高無上的地位。
彎曲工況為拖掛房車滿載且在路況良好水平路面上勻速直線行駛時其底盤的受力狀態,是最常見的工況之一。在該工況下,拖掛房車底盤僅承受豎直向下的彎曲載荷,主要包括車身、車廂內部物品、水箱以及其他附屬部件產生的重力載荷。該工況下的全局加速度(,,)=(0,0,-10),邊界約束條件為前方拖鉤處限制、和方向位移,左、右兩側車輪限制、方向位移。
222 制動工況
制動工況模擬前車發生緊急制動時,拖掛房車底盤的整體受力狀態。在該工況下,底盤不僅會承受垂直向下的載荷,還會承受因制動而產生的縱向慣性載荷,且縱向載荷的大小受整車總質量的影響。汽車的地面制動力可以采用制動力系數表示,制動力系數的最大值稱為峰值附著系數。前車在干燥的混凝土或瀝青路面制動時的峰值附著系數取值范圍為08~09,取前車地面制動力達到最大即=09,則最大制動加速度
==-09
(2)
在該工況下,全局加速度(,,)=(-09,0,-10)。邊界約束條件為前方拖鉤處限制、、方向位移,左、右兩側車輪限制、方向位移。
223 轉向工況
轉向工況模擬前車牽引拖掛房車轉向時拖掛房車底盤的受力狀態。在該工況下,拖掛房車底盤不僅承受垂直向下的重力載荷,還承受由于轉向產生的側向慣性力載荷。根據道路設計標準,當車輛在道路上以70 km/h的車速轉向時,道路的轉彎半徑為90 m,則拖掛房車受到的側向加速度

(3)
式中:為行駛速度;為轉彎半徑。
在該工況下,全局加速度(,,)=(0,-043,-10)。邊界約束條件為前方拖鉤處限制、、方向的位移,左、右兩側車輪限制、方向的位移。由于邊界約束條件對稱,左轉工況和右轉工況類似,因此只選取右轉工況進行研究。
224 混合工況
3 基于神經網絡的結構安全性預測
3.1 構建仿真數據集
使用HyperMesh對有限元模型進行前處理,生成求解文件,批量修改求解文件中的質心坐標等參數并進行有限元計算,即可得到用于神經網絡訓練的仿真數據集。對4種工況分別設定加速度向量,通過改變質心坐標構建4個仿真數據集。采用均勻采樣的方法,有限元模型的參數及其取值范圍和采樣間隔見表2。每個數據集有4 911組數據,4個數據集共19 644組數據。
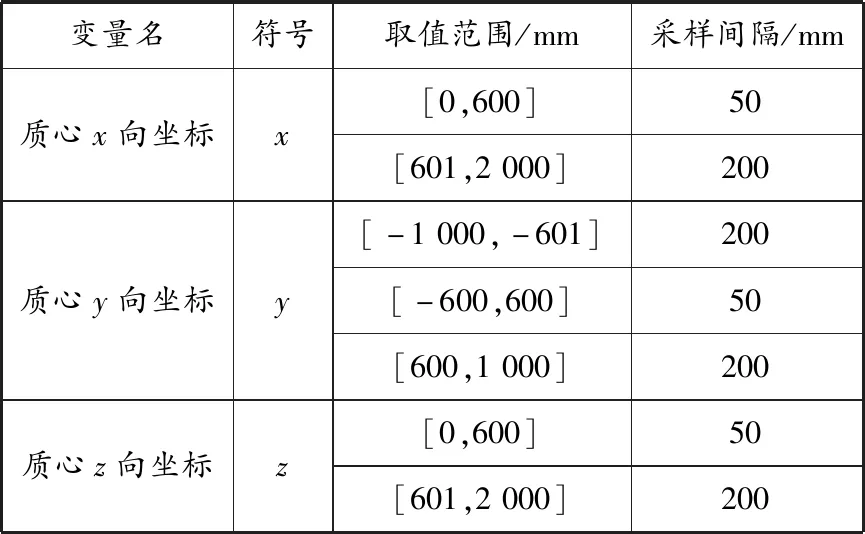
表 2 有限元模型變量的取值范圍及采樣間隔
3.2 構建回歸網絡
BP神經網絡由輸入層、隱含層和輸出層組成,預測精度高、容錯性佳。BP神經網絡的思想是將輸入數據正向傳播,將誤差反向反饋以修改網絡,如此不斷迭代直至網絡精度達到要求。BP網絡模型的輸入為質心坐標(,,),輸出為底盤結構的安全系數。數據集按照7.0∶1.5∶1.5的比例劃分為訓練集、測試集和驗證集。為提高神經網絡性能,使用雙隱含層的BP神經網絡。隱含層神經元個數

(4)
式中:為輸入層神經元個數;為輸出層神經元個數;為1~10之間的任意常數。
對各個神經元取值個數進行誤差分析可知,當隱含層神經元個數=12時誤差最小。
4 結果討論
4.1 神經網絡準確性分析
采用測試集數據的均方根誤差和平均絕對誤差對神經網絡的準確性進行分析。
均方根誤差能夠反應樣本的離散程度,表現預測值與真實值之間的差異,均方根誤差值越小,表示預測值越接近真實值,其計算公式為
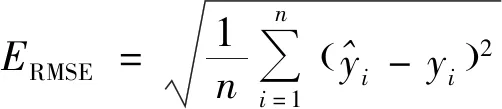
(5)

根據式(5),4種工況下神經網絡的均方根誤差分別為0001 9、0002 0、0002 9和0003 3。
平均絕對誤差表示預測值與真實值之間絕對誤差的平均值,其計算公式為
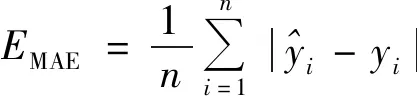
(6)
根據式(6),4種工況下神經網絡的平均絕對誤差分別為0001 1、0007 9、0001 4和0001 3。
由此可知,4種工況下測試集的均方根誤差和平均絕對誤差均較小,說明神經網絡的準確性較高。
4.2 構建拖掛房車各工況安全域
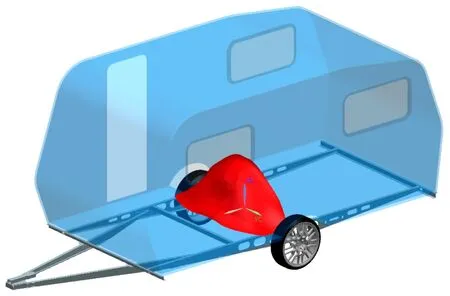
在不同工況下,拖掛房車所受到的載荷不同,因此其安全域也存在差別。取該拖掛房車的額定載質量為1.4 t計算安全系數,綜合考慮該拖掛房車的行駛工況和工作環境,安全系數閾值取=1.2,即安全系數計算結果大于1.2的區域為安全域。4種工況下拖掛房車的質心安全域見圖3。在彎曲工況下,底盤僅承受垂直向下的載荷,因此安全域較大,且能夠涵蓋其他3種工況的安全域;在制動和轉向工況下,底盤除承受垂直載荷外,還需要承受縱向和側向的載荷,是在彎曲工況的基礎上添加載荷,因此這2種工況的安全域均小于彎曲工況;混合工況是彎曲、制動和轉向工況的混合,其安全域最小。
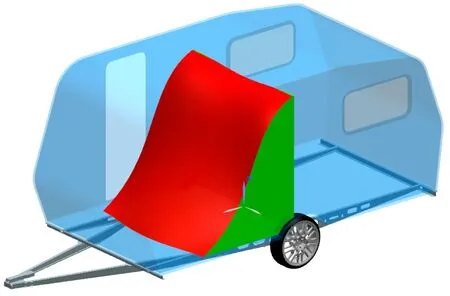
(a) 彎曲工況
4.3 構建拖掛房車整體的質心安全域
對上述4個安全域進行布爾求交,即可得到=1.2時拖掛房車整體的質心安全域及其對應的邊界曲面,本文選擇雙三次B樣條曲面。安全系數取值不同時質心安全域及其邊界曲面示意見圖4。混合工況是其他3種工況的混合,因此混合工況的安全區域與其他3種工況安全區域的交集基本一致,邊界曲面中的小平面區域由制動工況和混合工況求交得到。與制動工況相比,混合工況存在側向載荷,底盤受到的總載荷發生偏轉,其前部結構的受力狀態得到改善,因此在局部出現混合工況安全域大于制動工況安全域的情況。
4.4 安全域內、外質心點有限元仿真驗證
分別選擇安全域內、外的質心點進行有限元分析測試,驗證安全域的準確性。
(a1) 質心安全域
取位于彎曲工況安全域外的一點,質心坐標(,,)=(900,0,800),使用OptiStruct進行有限元分析,底盤應力云圖見圖5。最大應力出現在車軸處,為374.0 MPa,安全系數為1.15。有限元計算結果與預測結果一致。
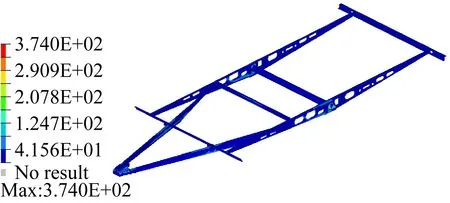
圖5 彎曲工況安全域外取值時底盤的應力云圖,MPa
取位于彎曲工況安全域內且制動工況安全域外的一點,質心坐標(,,)=(500,0,300),使用OptiStruct進行有限元分析,其應力云圖見圖6。彎曲工況下最大應力為184.9 MPa,安全系數為2.33;制動工況下最大應力出現在車軸處,為410.9 MPa,安全系數為1.05。有限元計算結果與預測結果一致。
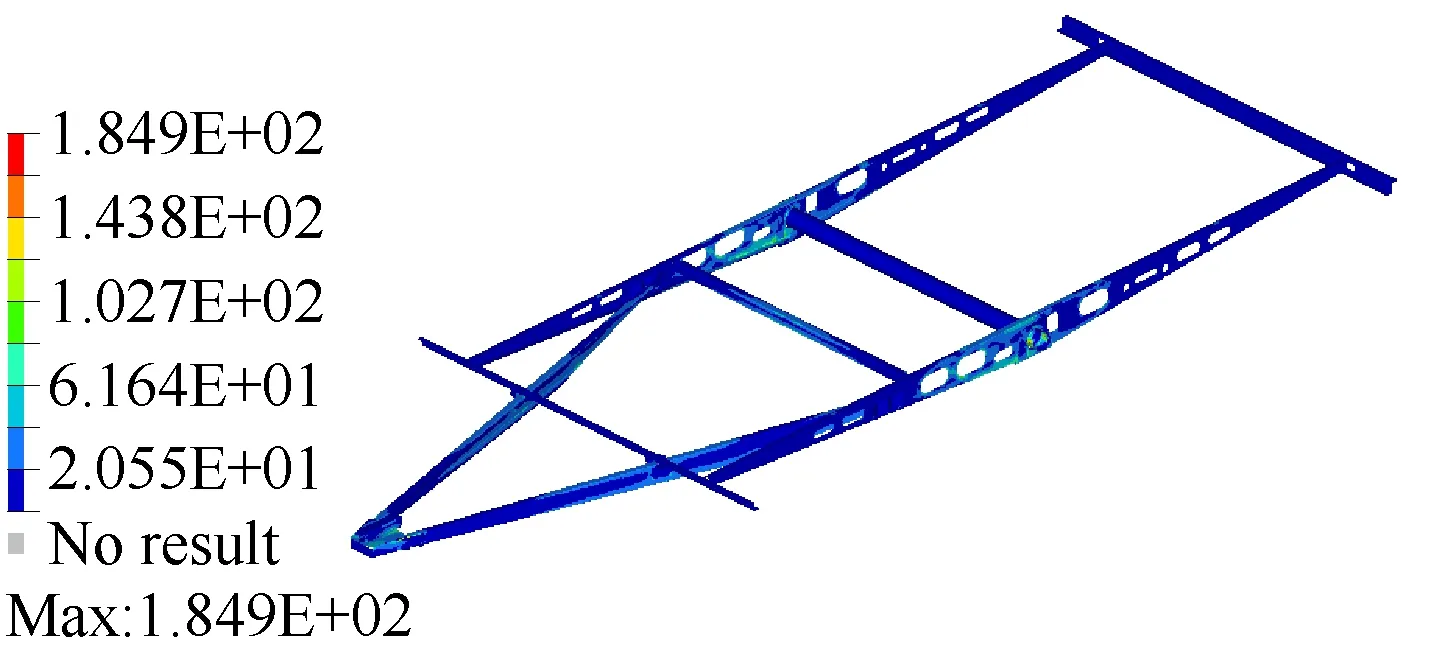
(a) 彎曲工況
取位于整體質心安全域內的一點,質心坐標(,,)=(200,0,300),使用OptiStruct進行有限元分析,其應力云圖見圖7。彎曲工況下最大應力為102.0 MPa,安全系數為4.22;制動工況下的最大應力為269.0 MPa,安全系數為1.60;轉向工況下最大應力為262.4 MPa,安全系數為1.64;混合工況下的最大應力為272.4 MPa,安全系數為1.58。有限元計算結果均處于安全域內,與預測結果一致。
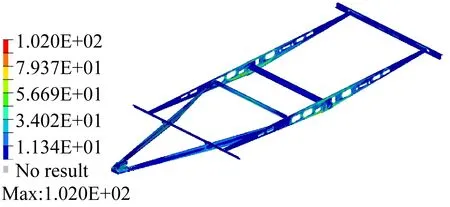
(a) 彎曲工況
5 結 論
通過對拖掛房車底盤有限元模型批量化處理,構建仿真數據集,使用神經網絡擬合質心坐標與拖掛房車底盤結構安全性之間的關系,計算拖掛房車在彎曲、制動、轉向和混合工況下的質心安全域,并對各安全區域進行布爾求交,得到整體的質心安全域及其邊界曲面。BP神經網絡測試集的均方根誤差和平均絕對誤差均較小,可認為BP網絡的準確性較高,能夠根據質心坐標和工況預測結構的安全系數。使用OptiStruct分別在安全域內、外取值進行計算,驗證安全域的準確性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
上海節能(2020年3期)2020-04-13 13:16:16
裝備制造技術(2019年12期)2019-12-25 03:06:00
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24