基于NURBS的模塊化三體船總體設計和優化
2022-10-18 12:06:32周陳炎
艦船科學技術 2022年18期
陳 玲,孟 巧,周陳炎
(南通理工學院 電氣與能源工程學院 船舶教研室, 江蘇 南通 226002)
0 引 言
三體船型是目前船舶領域的一種熱門船型,相對于常規船型,三體船型的興波阻力更小,在惡劣的風浪條件下具有更高的穩定性,這些特點使得三體船的設計、制造成為船舶行業研究的熱點,并在護衛艦、巡航艦、軍民兩用船等船舶類型上展開應用。我國在三體船型的研發和設計上處于世界先進水平,在三體船水動力理論、試驗、船型設計等方面投入了大量的時間和物力。
本文的研究方向是基于模塊化設計理念的三體船總體設計和優化,首先介紹模塊化設計理論的現狀,以某高速三體船為研究對象,采用NURBS曲線進行型線的擬合設計,基于型線設計進行三體船的特征曲面設計研究,最后結合流體動力學特性分析對基于模塊化設計的三體船特性進行了建模和仿真測試。
1 模塊化設計理論基本研究
模塊化設計理論最早是20世紀50年代歐美一些國家提出的,在產品大型化和快速化生產、裝配過程中,基于模塊化設計理論的產品不論是在生產效率、通用性和設計合理性方面,還是在產品的成本方面都具有顯著的優勢。
模塊化設計理論體系的基本原理如圖1所示。
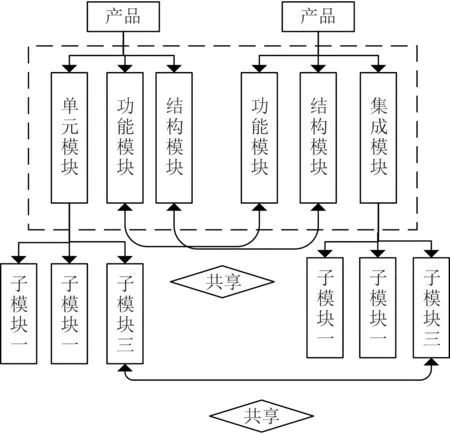
圖1 模塊化設計理論體系的基本原理Fig. 1 Basic principles of modular design theory system
模塊化設計理論可以根據產品開發過程大致分為以下4個階段:
1)模塊化總體設計
總體設計是指在模塊化設計的過程中對系統進行總體的策劃,模塊化總體設計的第1步是進行外部分析,整理來自外部的輸入條件和需求,確定模塊化總體設計的目標;第2步是進行模塊化方案設計,在承接內部和外部的需求前提下,對方案進行決策。
2)模塊化劃分設計
模塊化劃分設計環節是模塊化設計的核心環節,基于系統的總體功能特征,將系統進行不同功能和特性的分類和組合,結合系統的分析形成系統的宏模型, 將其劃分為若干個功能單元模塊。在劃分階段,不能局限于功能本身,要考慮設計、制造不同階段可能面臨的問題,需要權衡利弊得到最優模塊的劃分解決方案。
3)模塊化重組設計
模塊化重組設計是指模塊化創建與組合設計,模塊化重組設計是模塊化設計的第3個關鍵階段,其目標在于將總體設計過程中產生的方案、子系統等內容進一步細化與重組,形成一個可以實際應用的方案。但產品的重組設計在設計過程中不強調每個具體的產品特性,而是強調大量產品所構成的產品系列特性。重組設計模塊化設計的關鍵環節,主要流程包括確定子系統性能參數、幾何尺寸、結構布局、模塊接口、可靠性分析等,如圖2所示。
4)模塊化產品設計
產品設計是模塊化設計理論的落腳點和最終目標,也是模塊化設計的最后一個環節。
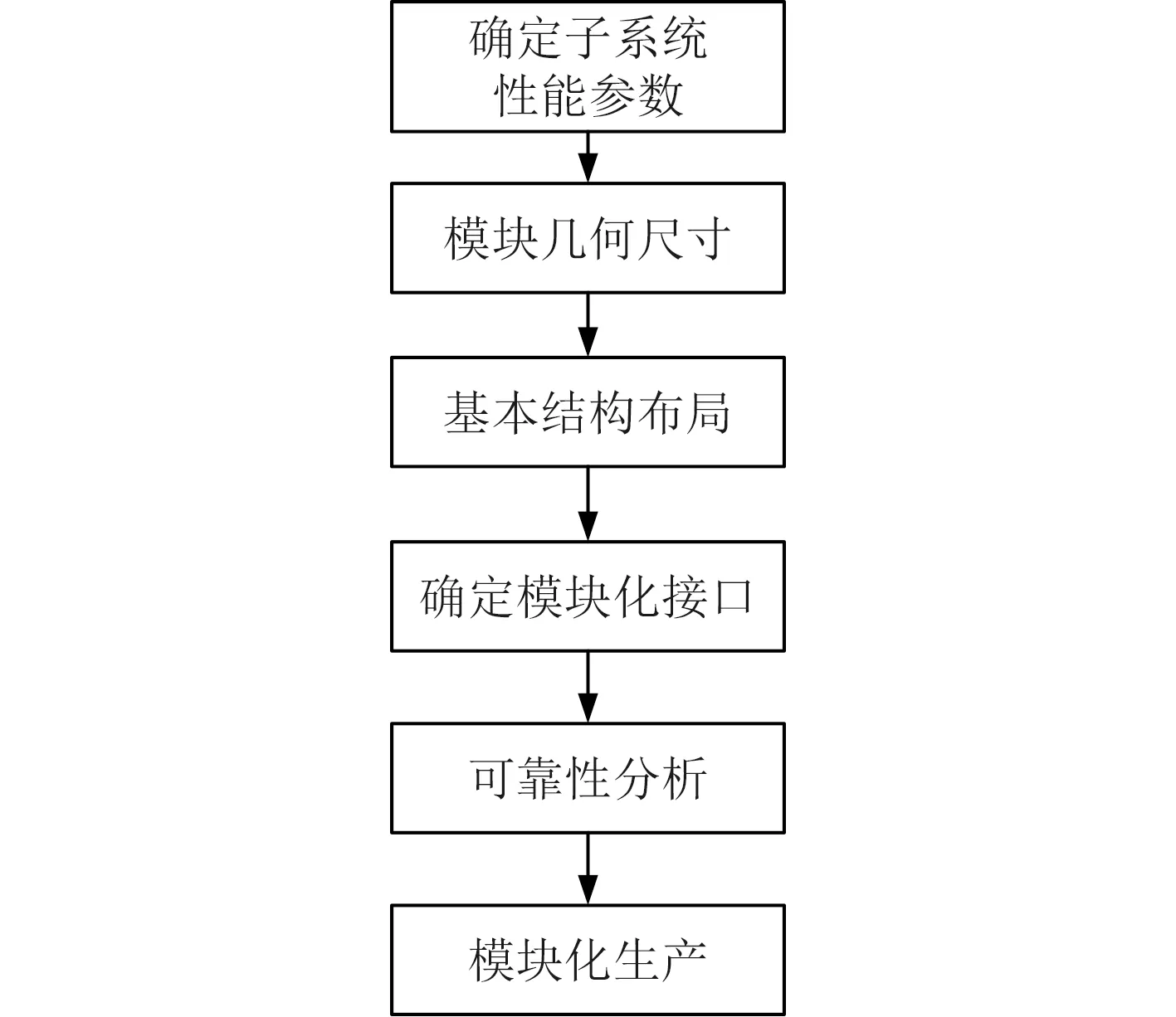
圖2 模塊化重組設計的流程圖Fig. 2 Flowchart of modular restructuring design
2 基于NURBS的模塊化三體船總體設計與優化
2.1 三體船的特征曲面設計
由于三體船的外型結構和流體力學特性相對于傳統船舶更加復雜,因此在三體船的特征曲面優化時需要綜合考慮大量的特征參數和曲面建模,其中,型線參數比如輪廓線、設計水線等,是決定三體船流體動力學特性的關鍵。
基于模塊化設計思路,將三體船劃分為不同的區域,每個區域的特征曲面按照由點到線、由線到面的設計思路,在型線設計時采用NURBS曲線進行型線的擬合設計
NURBS曲線模型用下式表示:
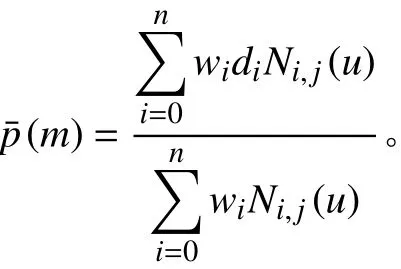
NURBS曲線的擬合過程用圖3表示。
基于模塊化設計思路的三體船曲面設計分為下述4步:
1)確定特征點元素

圖3 NURBS曲線的擬合過程示意圖Fig. 3 Schematic diagram of NURBS curve fitting process
根據三體艦船的區域特性,建立特征點控制方程如下式:其中: ψ(,,) 為 三體船的剖面曲率參數;()為三體船的寬度系數;()為 三體船的長度系數;F()為三體船的高度系數。
2)由特征點建立三體船的特征型線
根據三體船的長度系數()與剖面曲率參數ψ(,,),建立縱向特征型線如下式:
其中:k為曲線的曲率參數;α為船舶龍骨的縱傾角。結合寬度系數()和 高度系數F(),建立三體船舶的橫剖面曲線如下式:
3)三體船的型線優化
使用NURBS曲線函數對三體船的特征曲線進行優化,首先建立海水流場的物面條件:
式中:τ為法向量,即表面不可穿透。定義海水的波動方程為(,,)=0,則船體的型線優化模型如下式:
式中:,,分別為3個坐標軸方向的縱向特征系數;v,v,v分別為三個坐標軸的橫剖面特征系數。
4)由三體船型線建立三體船的特征曲面
由線到面的設計過程借助三維軟件SolidWorks完成,以特征點為坐標原點,在選定的型線上建立參考基準面,然后通過型線與基準面的平移、旋轉、縮放、掃略等變換,生成三體船的特征曲面。圖4為基于SolidWorks產生的三體船特征曲面。

圖4 基于SolidWorks產生的三體船特征曲面Fig. 4 Three body ship feature surface based on solidworks
2.2 三體船流體動力學特性分析
在型線設計的基礎上,對三體船的阻力和流體動力學性能進行數學建模和仿真分析,建立三體船的運動坐標系如圖5所示。
圖5 三體船的運動坐標系Fig. 5 Trimaran motion coordinate system
如圖,運動坐標系選取速度方向為OX正向,OY與左舷方向重合,OZ垂向向上,在該坐標系下建立三體船的速度勢ψ方程為:

建立三體船的運動模型為:

式中:u,u分別為運動速度分量;F為三體船受到的慣性合力。
在流體特性分析時,海水和空氣兩種流體視為不相容,假設三體船附近的海水和空氣流體計算域分別為和, 定義函數三體船的界面函數α (,)為:

式中:∈(,,) , α (,)滿足:

使用流體的VOF函數φ積分可得流場()的表達式:
ρ為流體的密度。
2.3 三體船流體動力學特性仿真
使用仿真平臺Matlab對三體船的流體動力學特性進行仿真,仿真的輸入信號包括三體船的型線方程、運動模型和海浪波形函數。其中,輸入的海浪波形函數如下:

式中:ψ 為幅值;為 頻率;k為周期波數;ε為相位角。三體船仿真模型參數如表1所示。
表1 三體船仿真模型參數表Tab. 1 Parameter table of trimaran imulation model
圖6為三體船優化時設計前后的模型興波阻力曲線對比。
3 結 論
三體船作為一種水動力特性更好的新型船舶,目前已經成為工業領域的熱點研究。本文結合模塊化設計理念,針對三體船的總體設計進行研究,重點利用NURBS曲線完成三體船的型線優化設計,基于型線設計完成了三體船的特征曲面設計,并對三體船的流體動力學分析進行深入研究。

圖6 三體船優化時設計前后的模型興波阻力曲線對比Fig. 6 Comparison of wave making resistance curves of trimaran models before and after design
猜你喜歡
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
裝備制造技術(2021年2期)2021-07-21 05:38:44
現代裝飾(2020年7期)2020-07-27 01:27:42
現代裝飾(2020年5期)2020-05-30 13:01:56
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中國核電(2017年2期)2017-08-11 08:00:56
海峽姐妹(2017年7期)2017-07-31 19:08:17
流程工業(2017年4期)2017-06-21 06:29:52
流程工業(2017年4期)2017-06-21 06:29:50
