數字陀螺羅經驅動方位分羅經黑箱設計
2022-10-18 12:13:24馮愛國
艦船科學技術 2022年18期
關鍵詞:系統
吳 煒,馮愛國,袁 偉
(1. 江蘇航運職業技術學院 交通工程學院,江蘇 南通 226010;2. 江蘇科技大學 自動化學院,江蘇 鎮江 212003)
0 引 言
在過去20年中,陀螺羅經等航海儀器迭代更新較快,數字化程度大幅提升,數據傳輸逐步統一到計算機接口(目前主要為串行通信或CAN總線),采用標準航海儀器交換NMEA報文,以滿足現代雷達、電子海圖、AIS、VDR等信息化設備數據采集,逐步形成高集成度的綜合駕駛臺系統IBS。作為船舶駕駛臺基礎傳感器之一,陀螺羅經或新型首向傳感器如光纖羅經雖然也有羅經航向數值的顯示裝置,但鑒于測方位的需要,數字化的分羅經在駕駛臺兩舷側不能滿足實船應用(方位測量)的需求,而且,大量現役艦船自動舵設備仍然基于給定航向與機電分羅經航向之間的電氣比較,如某型潛艇4207-G型航向自動操舵儀,完全數字化改造成本巨大,施工困難,已有的研究著重于對分羅經電機驅動方式的改進,即對現有分羅經系統全部替換,未見運用中間結構達成與現有分羅經系統兼容的內容,本研究運用中間系統進行數字驅動機電傳動的控制方法,實現中間轉換機構航向虛擬儀表顯示與云臺協議下的自整角機分羅經同步機械表盤傳向。
1 總體結構
1.1 系統主要功能
系統通過全數字化陀螺羅經(如安許茨標準22型陀螺羅經)或捷聯航姿參考系統(AHRS)航向與分羅經反饋航向比較參數自動驅動執行電機轉動,執行電機與機電分羅經發送器(本黑箱以交流同步自整角機為例,步進式原理類似)同軸聯結,分羅經電機同步轉動,分羅經電機轉角信號數字轉換(可以選用羅經傳向數字轉換標準件如CDI-2,也可以在一臺分羅經刻度盤轉軸利用角度傳感器軸聯),黑箱嵌入式板卡提供LED數碼顯示,通過計算機圖形技術編程(GUI+)實現羅經航向虛擬刻度盤顯示。
1.2 系統總體結構
系統由安許茨標準22型陀螺羅經提供本船首向參數與旋回速率參數,系統主體部分包括:數字陀螺羅經、黑箱上位機、下位機(云臺電機+自整角機發送器)、航向機電信號數字轉換模塊CDI-2或軸聯角度傳感器、控制軟件、電源等組成。總體結構如圖1所示。
各部件作用:數字陀螺羅經(主羅經):通過NMEA接口向黑箱上位機提供羅經航向數據;黑箱:云臺電機:接收黑箱上位機Pelco-D驅動啟、停、正反轉調速指令,同軸帶動傳統自整角機(分羅經發送機)轉動;航向機電信號數字轉換模塊CDI-2:船用標準部件,將自整角機信號轉換為分羅經數字信號向黑箱上位機傳送,提供LED數字航向顯示;分羅經接線箱與自整角機分羅經:船用標準件,實現黑箱對分羅經驅動,使分羅經刻度盤與主羅經同步;黑箱上位機:通過主羅經航向、分羅經航向數據接收模塊、主、分羅經航向數值比較模塊、比較參數轉方位電機驅動指令模塊、控制算法模塊的序列解算,實現控制指令向黑箱云臺伺服電機傳送,實現伺服電機與軸聯自整角機角運動控制。系統中分羅經信號數字轉換也可以在一臺分羅經刻度盤軸聯角度傳感器,并通過單片機編程實現LED顯示與向黑箱上位機分羅經航向反饋數值,方案成本更低,但精度與可靠性略低;系統也可以驅動步進式羅經傳向系統,原理類似。
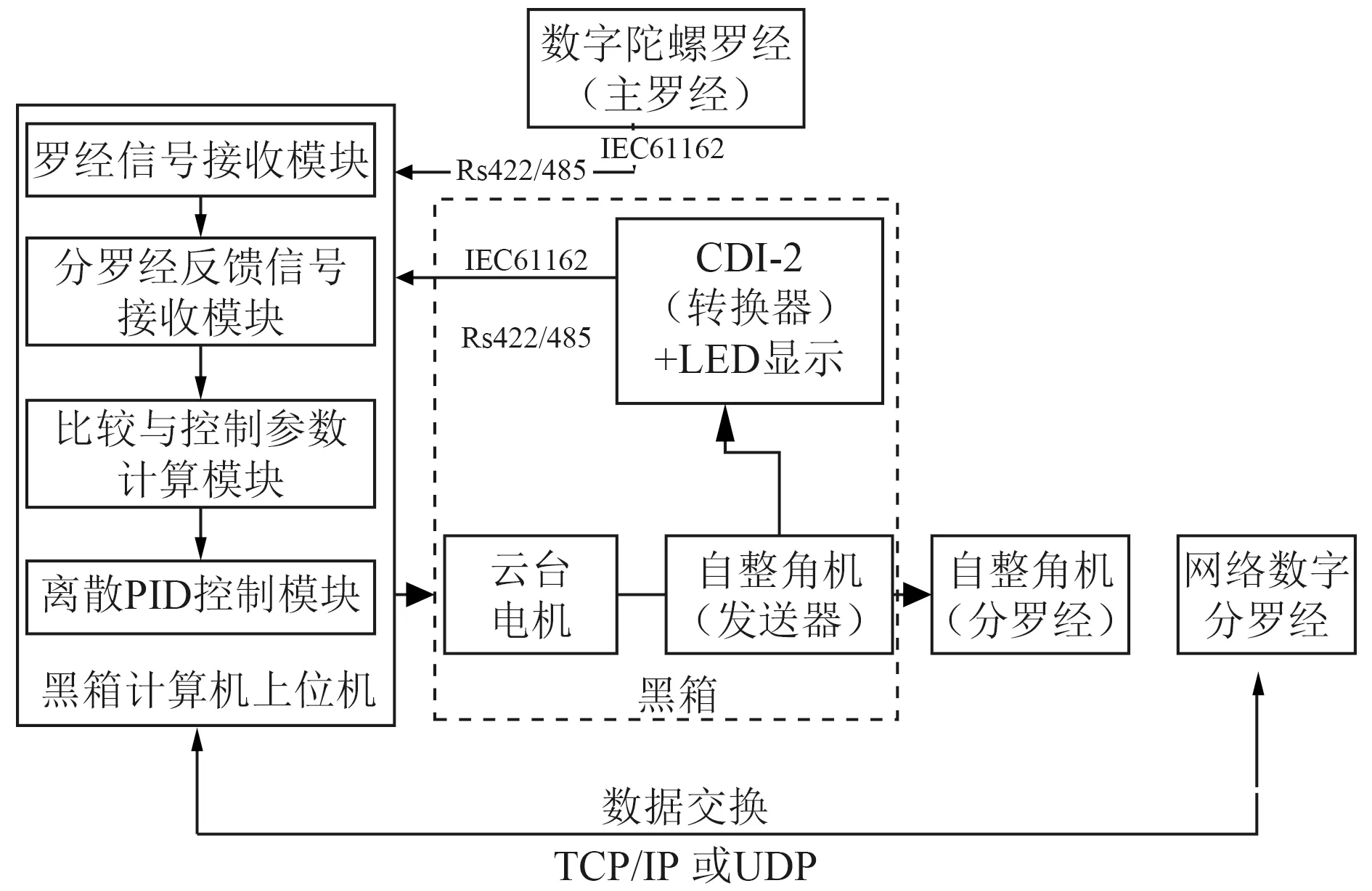
圖1 系統總圖Fig. 1 General layout system
2 系統功能實現的相關技術
2.1 IEC61162協議下的主、分羅經航向參數采集與解碼設計

安許茨標準20/22型陀螺羅經航向數字輸出線路,位于主羅經頂部有3片PCB電路板,其中Connection-PCB NB05-356 板卡CAN1、CAN2可以以CAN總線形式輸出航向信號;B2、B3、B4端子以RS422串口形式輸出NMEA0183標準航向語句,語句為明碼發送。
串口采集流程如圖2。
CDI-2型電羅經模擬信號數字轉換部件,可以將傳統自整角機同步式與步進電機式分羅經信號轉換為與主羅經輸出格式一致的航向數字信號,作為黑箱驅動機電分羅經后的反饋信號,同步式與步進電機式接口連接與配置,除同步與步進選擇開關撥到準確位置外,還需注意不同系列機電分羅經銘牌標注的齒數比。

圖2 航向數據串口采集流程Fig. 2 Process of heading data serial port acquisition
2.2 主、分羅經偏差轉換方位電機控制指令算法
1)航向偏差與執行電機驅動指令關系
由主羅經與分羅經反饋航向偏差計算執行電機驅動指令,設輸入偏差: Δ α=(C-C).其中:主羅經航向為C,分羅經航向為C。若 0 <Δα<180,左轉;Δα>180 , 右轉;若 Δ α<0 , | Δα|>180 , 左轉;|Δα|<180,右轉。
轉動速度參數,由輸入偏差 | Δα|根據PID控制算法計算得出。
2)基于Pelco-D協議的執行電機驅動方法
利用離散數字式PID控制算法實現主羅經與分羅經機電傳向,考慮實現航向平滑傳遞,在分羅經航向反饋基礎上加入了主羅經ROT(轉向速率),以擾動信號疊加,由于機電傳向自身阻尼特性較好,控制系統中慣性環節考慮省略。控制系統回路設計如圖3所示。
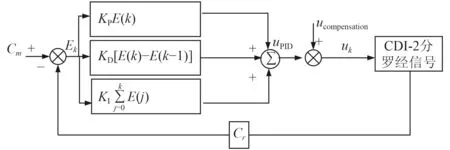
圖3 云臺控制系統回路Fig. 3 Loop of gimbal control system
利用計算機設計數字PID控制器,主羅經航向值與分羅經反饋值之差構成系統偏差輸入,運用角位置PID控制得控制器輸出和增量控制法的系統輸出分別如下:


增量式控制算法的優點是誤動作小。系統角位置跟蹤采用增量PID控制,故在較大偏差范圍內電機方位速度指令給出最大值時,能快速給出傳向動作使本系統機電分羅經與主羅經同步,經調試,系統設計在航向偏差超過30°時,Pelco-D給出最大轉速執行指令,在航向偏差30°以內,設時刻第次采樣給定主羅經航向參數C, CDI-2分羅經航向采樣反饋C,偏差輸入()=(C-C)/30=Δα/30,PID控制輸出為(),云臺控制指令十進制數據為:()×64,十進制轉十六進制即為云臺方位電機速度指令,以免主、分羅經接近同步時超調震蕩。系統直接給出明碼動作指令。
2.3 航向刻度盤虛擬儀表顯示與航向記錄
用C# SerialPort類接收羅經航向報文,經CRC校驗后,再利用“split”拆分并解析報文全句獲得航向值句塊,為達到與傳統機電式機械刻度盤分羅經等效的表達效果,采用計算機圖形技術實時繪制平面儀表圖形,利用循環繪制了十度刻度線與一度刻度線,將“000”“010” …“350”字串label1(i)控件數組計36個倒序為350,340…文本,打印在對應屏幕位置,實現了虛擬羅經刻度盤顯示。
黑箱上位機采集到主羅經與分羅經航向數據實時航向數據庫,存儲策略為“先入先出”,設計含時間、主航向、分顯航向字段的數據表,運用SqlConnectionstring構建系統與SQLServer的數據庫連接,運用SQL語句實現數據庫操作,運用SqlDataAdapter及DataTable實現數據綁定顯示。采用計算機圖形技術繪制基于時間軸的主羅經航向變化曲線。
3 安裝、校調及測試結果驗證
黑箱樣機由微型工控機、云臺控制器、云臺PAN電機軸聯自整角機、CDI-2羅經信號轉換模塊,3路RS422串口(主羅經、分羅經、云臺控制器)卡座、電源端子與自整角機分羅經接線端子(R1,R2,S1,S2,S3)組裝成型,正面開孔嵌入工控顯示屏與數碼顯示屏,并提供工業以太網及WiFi類型網絡平面分羅經顯示。
黑箱前端配置安許茨STD22型數字陀螺羅經,通過黑箱與4 207-G型航向自動操舵儀(原航海—Ⅲ型電羅經配套),并與同類110 V/50 Hz供電BS—404A型(360X)自整角機式分羅經連接(通過分羅經接線箱可拖動12個)。
接通黑箱云臺電機電源、110 V/50 Hz自整角機分羅經激磁供電電源、CDI-2模塊電源,打開黑箱上位機自動運行控制程序,為滿足一機多用需求,控制程序可置于后臺運行,用機械手柄匹配分羅經刻度盤航向與主羅經航向一致,設置CDI-2初始航向值與主、分羅經讀數一致,啟動上位機同步運行鍵,主羅經通過萬向輪底座改變航向,假設艦船航行速度忽略,分別模擬平正狀態與輕微搖擺狀態(航向搖擺角幅值為6, 周期為7 s;縱搖角幅值為8,周期為5 s;橫搖角幅值為10,周期為8 s),進行勻速轉向、變舵角轉向、突停等模擬測試。測試結果如圖4和圖5所示。結果表明,反應靈敏度 < 0.3,偏差< 0.3,響應速度< 1 s。

圖4 勻速轉向一周主分羅經航向值與偏差Fig. 4 Heading value and deviation of the main division compass in a uniform turning cycle
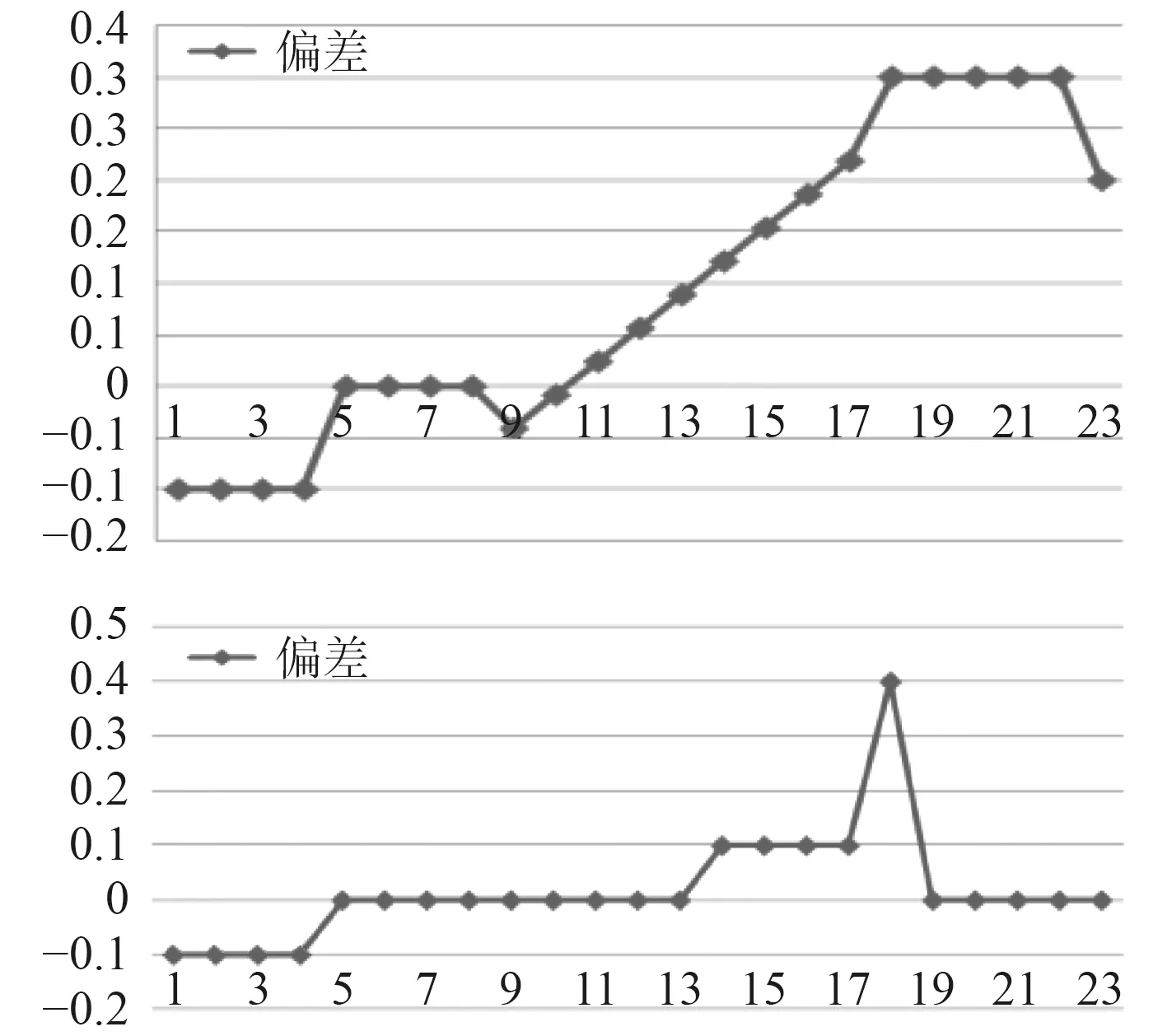
圖5 變速轉向一周與轉動突停主分羅經航向偏差Fig. 5 Variable speed steering round and rotation stop main compass heading deviation
4 結 語
本文介紹一種羅經數字航向信號驅動機電分羅經的黑箱系統,能解決羅經航向數字化顯示與機械表盤式方位分羅經配備要求之間的矛盾。解決方案同樣適用于步進式分羅經系統傳向,對磁羅經傳感器數值也能實現機械表盤傳向。系統分羅經航向反饋亦可采用角度傳感器與一臺分羅經軸聯,然后利用嵌入式板卡處理實現,進一步降低成本。系統對解決航海儀器數字化升級后與現有裝備之間向下兼容問題有較高的實用性,具有數模雙態支持的靈活性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
