應用SMES的船舶微電網儲能柔性控制系統設計
2022-10-18 12:12:44連廷耀
艦船科學技術 2022年18期
連廷耀
(廣東交通職業技術學院 海事學院,廣東 廣州 510000)
0 引 言
船舶微電網主要由直流母線、電源、負載和儲能4個部分組成,其中利用風能和太陽能為該微電網提供電能驅動,儲能配件則負責存儲多余的風能和太陽能電量。但能量存儲配件受放電電壓影響,導致其負載電阻瞬間變化,使其供電電壓形成較大波動情況。隨著超導磁技術的發展,超導磁(SMES)儲能裝置被應用到船舶微電網內。SMES儲能裝置在正常運轉情況下的電阻數值為0,其自身不會形成焦耳損耗,且其存儲電能容量較大載流密度也較高。但SMES儲能裝置在船舶微電網儲能應用過程中,受磁場力和低溫環境影響,導致超導磁材料的超導態受到影響。因此有必要對其應用在船舶微電網儲能過程中進行柔性控制。目前很多學者致力于研究微電網儲能控制系統,如傅守強等設計的直流配電功率平滑控制系統和季宇等設計的無源-滑模復合控制系統。前者從微電網中壓互聯裝置入手,通過對其進行采樣,使用PI控制器對其暫態功率進行補償后實現微電網儲能控制,后者則依據微電網光伏儲能的隨機特征,利用無源控制方法并結合PBC-SMC復合控制器實現微電網光伏儲能控制。上述2種方法在應用過程中均存在不同程度缺陷,且并未考慮微電網儲能裝置存在擾動時如何對其進行控制。為此,本文設計應用SMES的船舶微電網儲能柔性控制系統,提升船舶微電網儲能效果。
1 船舶微電網儲能柔性控制系統
1.1 系統技術框架
以B/S架構為基礎,設計應用SMES的船舶微電網儲能柔性控制系統,該系統技術框架如圖1所示。
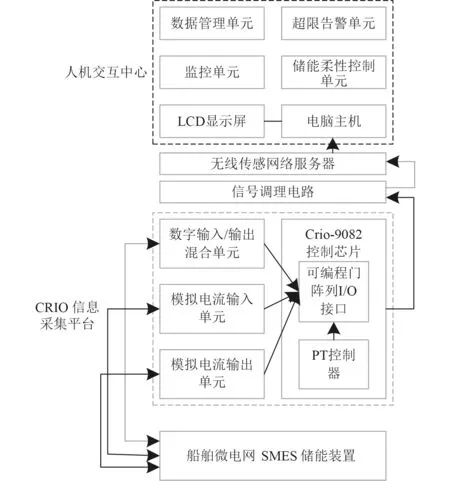
圖1 船舶微電網儲能柔性控制系統技術框架Fig. 1 Technical framework of ship microgrid energy storage flexible control system
船舶微電網儲能柔性控制系統技術框架由4個部分組成,分別是船舶微電網SMES儲能裝置、CIRO信息采集平臺、信號調理電路和人機交互中心。
1.2 硬件配置選取
CRIO信息采集平臺是實現的船舶微電網儲能柔性控制信息采集和接收采集命令的平臺,其可獲取當前舶微電網儲能運行參數并向人機交互中心發送實時信息,完成船舶微電網儲能實時信息上傳和接收人機交互中心發送的采集命令。
1.3 信號調理模塊設計
信號調理模塊負責將CRIO信息采集平臺采集到的船舶微電網SMES儲能實時電壓信息轉換為統一區間的電流信息,其是實現船舶微電網儲能柔性控制的核心步驟。
將電壓信息輸入到接入電路電壓內,其經過負載電阻后輸送到兩級放大器內的負極內,同時將輸入電壓和偏置電壓輸入到兩級放大器正極內,經歷兩級放大器調理后即可輸出同一區間的船舶微電網SMES儲能實時電流信息。
1.4 無線傳感網絡服務器設計
無線傳感網絡服務器是支撐船舶微電網儲能柔性控制系統信息傳輸的基礎,設計無線傳感網絡服務器信息傳輸流程,如圖2所示。
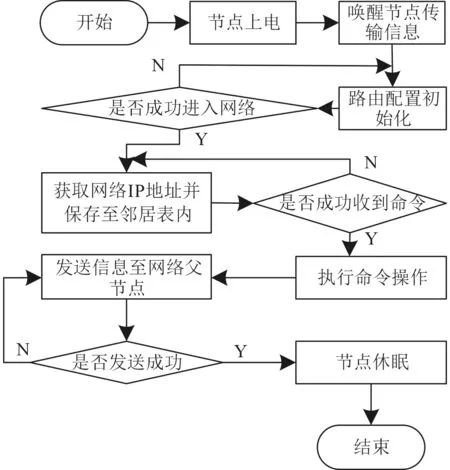
圖2 無線傳感網絡服務器信息傳輸流程Fig. 2 Information transmission process of wireless sensor network server
1.5 系統運行狀態信息收集與控制命令下發回路設計
船舶微電網儲能柔性控制系統運行狀態信息收集和控制命令下發是使系統啟動的關鍵,設計系統運行狀態信息收集與控制命令下發回路。
通過Crio-9 082控制芯片接收船舶微電網儲能柔性控制命令并執行該命令,實現船舶微電網儲能柔性控制過程。
1.6 基于線性自抗擾的SMES儲能裝置變流器設計
船舶微電網儲能柔性控制系統內人機交互中心使用儲能柔性控制單元實現船舶微電網SMES儲能裝置的柔性控制。儲能柔性單元使用自編程軟件形式設計的線性自抗擾的SMES儲能裝置變流器程序完成船舶微電網SMES儲能裝置的柔性控制全過程。線性自抗擾的SMES儲能裝置變流器設計過程如下:
船舶微電網SMES儲能裝置主要由交流側儲能變流器和直流側斬波器組成。
船舶微電網SMES儲能裝置拓撲結構為典型的VSC結構,其交流側和船舶微電網相連,可有效抑制船舶微電網功率不平衡現象。SMES儲能裝置通過斬波和船舶微電網儲能變流器直流側電容連接,實現船舶微電網的充電和放電功能。
依據SMES儲能裝置拓撲結構,設計由跟蹤微分器、線性擴張觀測器和線性誤差反饋控制率組成的線性自抗擾SMES儲能裝置變流器。構建SMES儲能裝置數學模型如下:

式中:表示SMES儲能裝置階數;()表示階數為且時為時,SMES儲能裝置當前儲能充放電數值;表示控制增益;表示船舶微電網總擾動數值;() 表示時刻為時無干擾控制量。
將式(1)內的船舶微電網總擾動數值作為未知狀態變量,使船舶微電網SMES儲能裝置當前數值擴展出新狀態,形成船舶微電網SMES儲能裝置狀態空間,其表達公式如下:
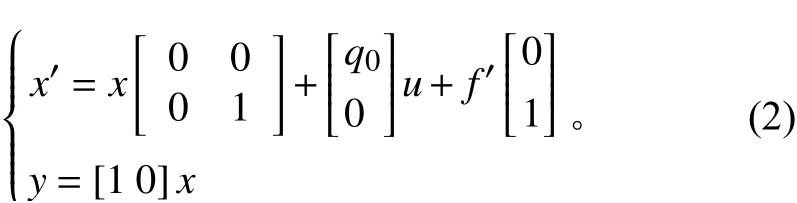
式中:表示變流器交流側輸出數值;表示船舶微電網SMES儲能裝置交流側在軸上的電流和擾動數值集合;表示當前船舶微電網SMES儲能裝置新狀態;表示新狀態下的總擾動數值。
依據式(2)結果建立二階線性擴張觀測器推導公式后并對船舶微電網SMES儲能裝置狀態變量和總擾動數值進行估計,其表達式如下:

式中,σ表示二階線性擴張觀測器跟蹤狀態。
由公式(3)可知,二階線性擴張觀測器作用的關鍵在于對船舶微電網SMES儲能裝置狀態的實時擾動進行估計并加以消除,使補償后的船舶微電網SMES儲能裝置狀態形成線性積分串聯狀態。
將上述過程以軟件自編程形式寫入到人機交互中心的儲能柔性控制單元內,用戶通過啟動該單元即可實現船舶微電網儲能柔性控制。
2 實驗分析
以某船舶微電網為實驗對象,使用本文系統對該微電網SMES儲能裝置進行柔性控制,以驗證本文系統實際使用效果。該船舶微電網架構如圖3所示。
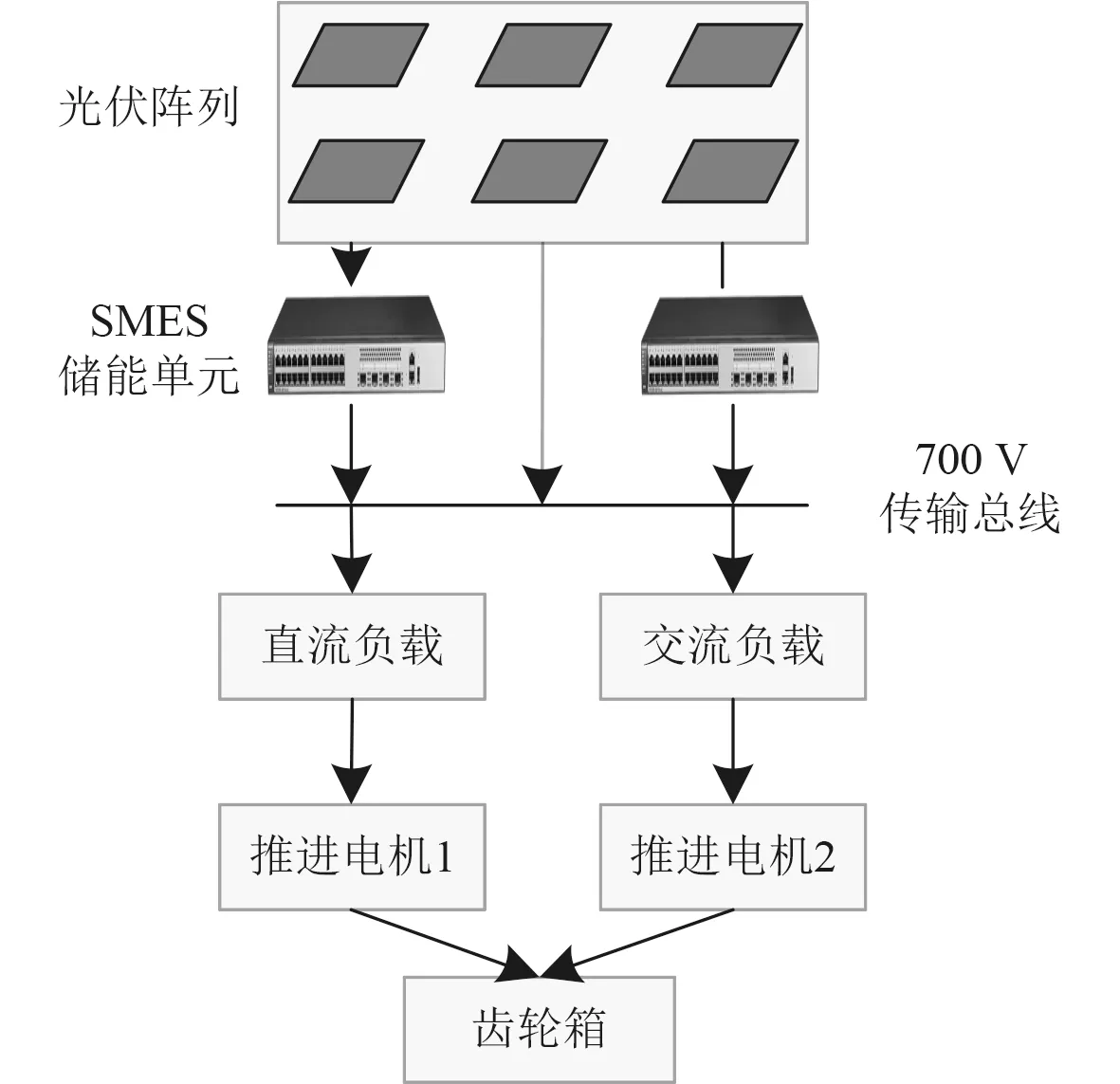
圖3 船舶微電網架構Fig. 3 Architecture of ship microgrid
2.1 可靠性測試
系統運行可靠性的量化指標是其在運行周期內平均無故障運行時間,以其為衡量本文系統可靠性指標,設置5個運行周期每個周期為30天,統計10個運行周期內本文系統運行中斷時間。
本文系統在5個運行周期內僅在第1個和第3個運行周期時分別出現1次中斷情況,中斷持續時間分別為0.2 min和1 min,其總中斷持續時間為1.2 min。該數值說明本文系統在運行周期內平均無故障時間較長,具備良好的可靠性。
2.2 儲能信息采集測試
給出本文系統對該船舶微電網SMES儲能裝置進行采樣界面,如圖4所示。
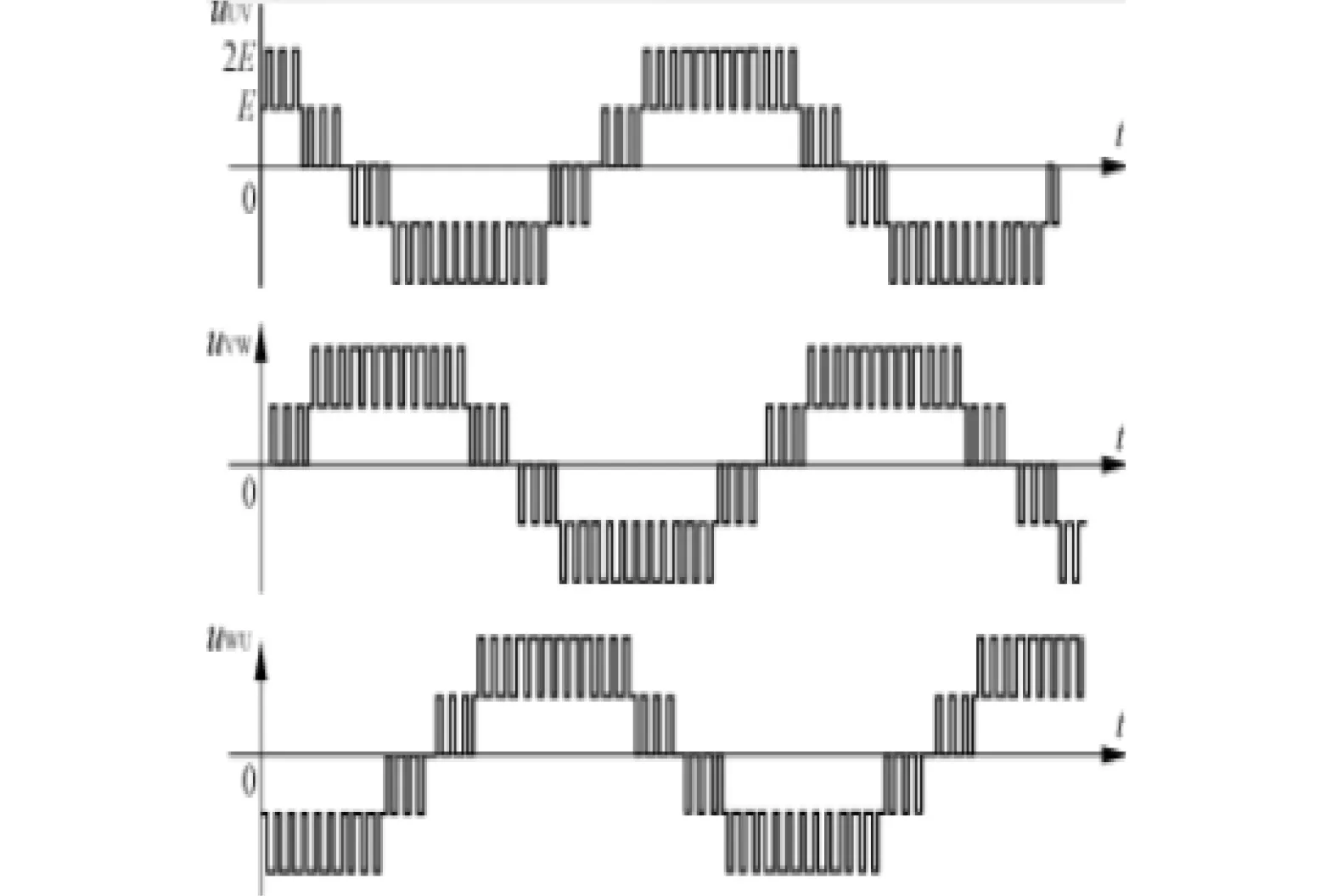
圖4 儲能信息采集測試Fig. 4 Energy storage information acquisition test
可知,本文系統在采集船舶微電網SMES儲能信息時,可通過設置不同采樣點數值和采樣頻率采集不同時段或不同狀態下的儲能數據。也可從該畫面觀察到當前儲能裝置輸出和輸入電流波形。說明本文系統在采集舶微電網SMES儲能信息時具備較好的可控性,信息采集能力較為全面。
2.3 儲能柔性控制效果測試
以船舶微電網儲能輸出母線電壓為實驗對象,應用本文系統對該輸出母線電壓進行柔性控制,結果如圖5所示。

圖5 船舶微電網儲能輸出母線電壓柔性控制效果Fig. 5 Flexible control effect of ship microgrid energy storage output bus voltage
可知,船舶微電網儲能輸出母線電壓在未對其進行柔性控制前,其母線電壓波動區間在-0.3~1.3之間,而應用本文系統對其進行柔性控制后,其電壓波動區間僅為0.6~0.9之間,且輸出電壓最大數值和最小數值之間差值得到有效降低,大大抑制了母線輸出電壓波動。說明本文系統可有效對船舶微電網儲能輸出母線電壓進行柔性控制,使其輸出電壓數值波動區間較小。
以信號調理電路輸出船舶微電網儲能電流波形為實驗對象,測試本文系統對船舶微電網儲能柔性控制效果,結果如表1所示。
可知,船舶微電網儲能電流在未應用本文系統進行柔性控制時,其初始電流數值呈現波浪狀起伏趨勢,且起伏跨度較大。而經過本文系統對其進行柔性控制后,電路數值起伏趨勢與初始電流完全相同,但控制后的船舶微電網儲能電流數值較初始電流數值低2.17 A。該結果說明本文系統在控制船舶微電網儲能電流方面同樣具備較高的性能,其應用效果較好。
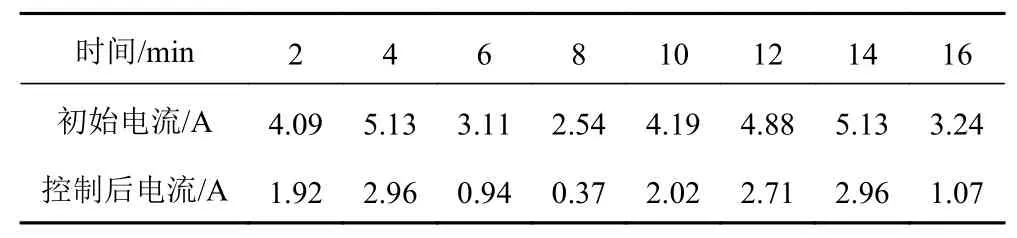
表1 信號調理電路輸出前后電流數值Tab. 1 Current values before and after signal conditioning circuit output
3 結 語
本文設計應用SMES的船舶微電網儲能柔性控制系統。該系統分析SMES儲能裝置拓撲結構,有針對性地設計了基于線性自抗擾的SMES儲能裝置變流器,并以軟件自編程形式將其寫入到系統人機交互中心內的儲能柔性控制模塊內,通過啟動該模塊內控制器程序,實現船舶微電網儲能柔性控制。經過實驗驗證:本文系統運行時周期內平均無故障時間較長,可靠性較高;可有效降低船舶微電網儲能輸出母線電壓波動區間。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中華手工(2017年2期)2017-06-06 23:00:31
中國船檢(2017年3期)2017-05-18 11:33:09
中外會展(2014年4期)2014-11-27 07:46:46
航海(2005年4期)2005-04-29 00:00:00
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
