基于OWL的CMM探測系統智能配置方法研究
2022-10-14 01:06:52黃美發劉廷偉唐哲敏羅民宏
機床與液壓 2022年1期
黃美發, 劉廷偉, 唐哲敏, 羅民宏
(1.桂林電子科技大學機電工程學院,廣西桂林 541004;2.廣西制造系統與先進制造技術重點實驗室,廣西桂林 541004)
0 前言
信息技術和制造技術的快速發展使得零件制造誤差的智能化檢驗已成為必然的發展趨勢[1-2]。現階段零件誤差的測量,需要根據零件的功能要求、圖樣標注和技術要求等文本說明,通過人工獲取所標注產品與制造信息(Product Manufacture Information, PMI)的含義即工程語義,依據測量條件作出綜合決策;確定測量設備,選擇測量方法;通過測量設備獲取實測數據,調用評定算法得到測量結果,最后判定其合格性[3]。但是,為保證工程語義在設計與測量中相統一,正確理解工程語義自動推理出合理的探測系統方案是亟待解決的問題。
探測系統是三坐標測量機(Coordinate Measuring Machine, CMM)的重要組成部分,由測頭、測座和探針等組成[4]。由于探測系統方案選擇具有較多不確定性,測量質量嚴重依賴相關人員的水平和經驗,導致零件測量成本增加,并最終影響零件驗收。因此,利用CMM進行智能檢測,實現探測系統的智能配置具有重要意義。
目前,針對公差檢測中的工程語義表示與傳遞、智能決策等問題,主要運用語言模型、范疇論、多屬性決策方法、本體技術和多色集合等5種方法進行研究。
ZONG等[5-6]基于EXPRESS語言和可擴展標記語言等語言模型,構建零件公差表示模型,但此類模型是一種標記性語言,無法滿足語義表示。LU[7]基于范疇論的方法,提出范疇論測量模型,此模型在語法上能正確推理測量設備。ZHAO等[8-9]基于多屬性決策的方法,構建了幾何公差規范設計模型,構造推理規則得到公差項目,但未實現異構系統語義傳遞。目前,以上3種方法均用于公差規范,未實現測量方案的智能推理。QIE等[10-12]基于本體的方法,構建公差語義表示的本體模型,實現公差項目和一致性檢測方法的智能推理,但對異構系統中信息傳遞的研究較少。劉恩福等[13-14]基于多色集合的方法,構建幾何公差信息的語義表示模型,實現在CAD異構軟件中集成,進而實現測頭類型推理,但構建的表示模型未能使計算機理解工程語義。
尺寸與公差信息(GD&T)的有效獲取與正確表達是進行零件語義傳遞的首要工作。許多學者提出了一種由STEP(Standard for the Exchange of Product Model Data)文件向OWL映射的方法,提供了由STEP向OWL映射的詳細規則,但是生成的STEP文件缺失GD&T信息[15-16]。
目前,還沒有一種既能滿足工程語義在異構系統中表示和傳遞的需求又能智能推理出合理的探測系統配置的方法。針對該問題,本文作者采用模型定義(Model Based Definition, MBD)和本體結合的方法,研究工程語義從CAD系統到.owl文本的形式化表示和探測系統的智能配置方案。
在工程中,本體(OWL)的形式化語言對特征知識進行規范化表示,使語義能夠被計算機所理解并在異構系統共享[10-12]。利用Jane規則的推理機有高效的推理能力,同時能保證相關推理的準確性。
借鑒于本體技術的功能,構建探測系統本體模型,通過調用所設計的生成.owl文件的算法,得到包含個體信息的探測系統本體,再構建Jena規則,智能推理出CMM探測系統方案。最后,通過測量零件,驗證方法的有效性。
1 零件PMI信息的表示
將零件的產品與制造信息[17](Product Manufacture Information, PMI)以數據結構的形式表示,并顯式地給出與公差項目關聯所需的幾何要素和尺寸,所有采用本體形式化語言對零件的PMI信息進行規范化表示。因此,采用數據集的方法來表示基于MBD技術的零件信息。當前,具有特征構造功能的CAD系統支持MBD模型的建立,采用MBD技術建立完整的包含設計與制造信息的零件模型,如圖1所示。
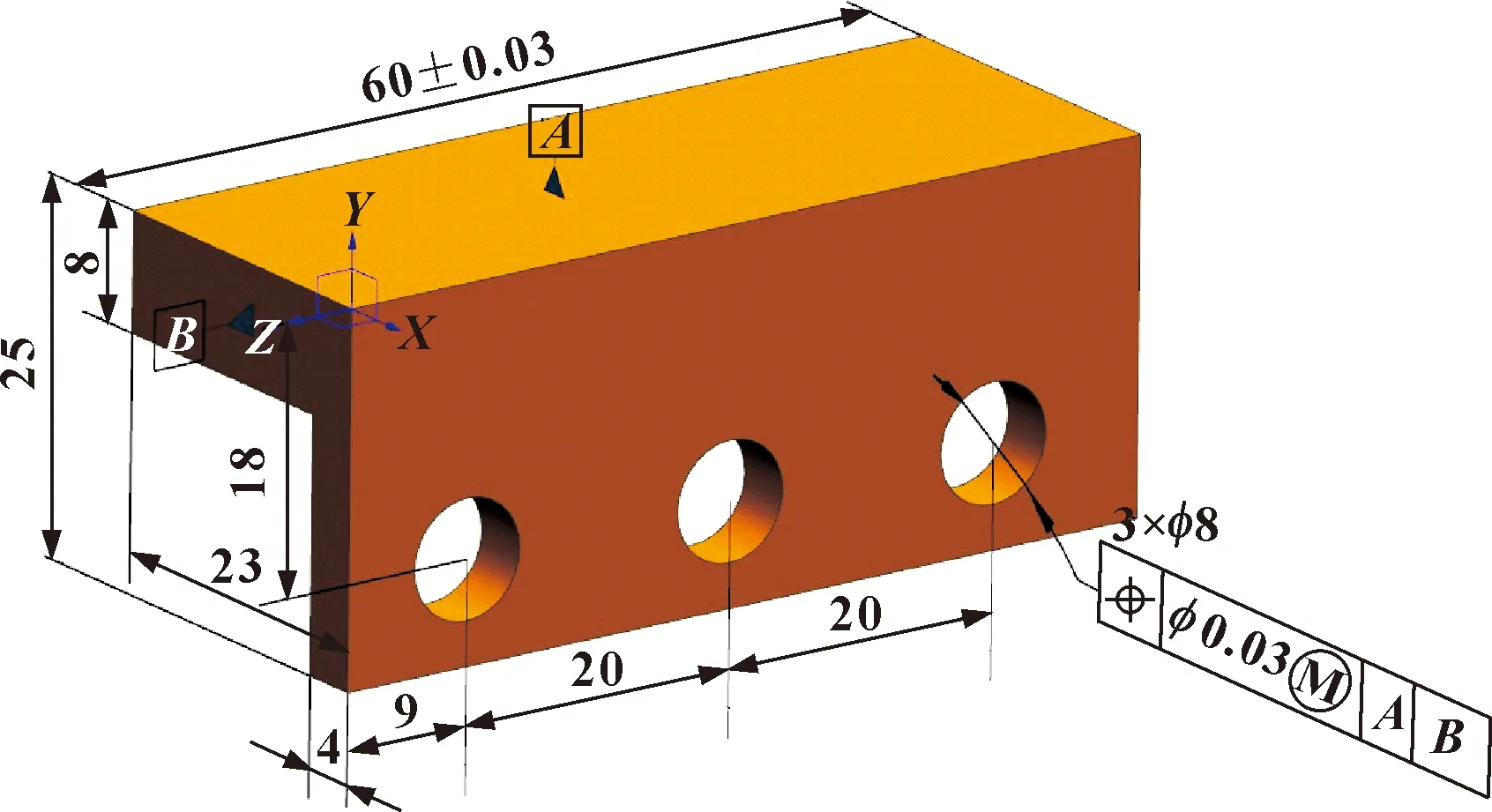
圖1 基于MBD技術的零件模型
此數據集方法就是采用集合的方式來描述三維狀態的GD&T、基準、幾何要素以及零件坐標等零件PMI信息[17],然后采用關系矩陣來表示GD&T信息和幾何要素之間的關聯,以及基準和幾何要素之間的關聯。因此,構成數據集的基本元素可以由幾何特征集Ch、標注集La和坐標集Co等三部分構成,即構成測量零件信息基本元素的集合Pa為
Pa={Ch,La,Co}
(1)
特征集Ch由一個或m個特征構成,其中每個特征由面集Fss、線集Lis和點集Pos等3種要素組成。Fss由1個或n個面構成,包括球面、圓柱面、平面(中心平面)、旋轉面、螺旋面、棱柱面和復合面。Lis由1條或l條線構成,包括素線和中心線。Pos由1個或k個點構成,包括端點和中心點。上述特征到幾何要素的拓撲過程可以表示為公式(2)(3):
Ch={Fs1,Fs2,…,Fsm}
(2)
Fsi={Fssi+Lisi+Posi}i=1,2,…,m
(3)
標注集合La由形位公差項目集合To、尺寸集合Tl和基準集合Da等三部分信息組成,如公式(4)所示:
La={To,Tl,Da}
(4)
其中:形位公差項目集合To由形狀公差TF、定向公差TO和位置公差TLC組成,如公式(5)所示:
To={TF,TO,TLC}
(5)
一個形位公差框圖里最多包括:公差類型FLToType、公差值類型FLToValueType、公差值FLToValue、公差基準Datum、公差值有公差原則FLToVaPrinciple、第一基準有公差原則DaPrinciple_1、第二基準有公差原則DaPrinciple_2、第三基準有公差原則DaPrinciple_3等信息,如公式(6)所示:
TO={FLToType,FLToValueType,FLToValue,FLToVaPrinciple,DaPrinciple_1,DaPrinciple_2,DaPrinciple_3}
(6)
尺寸集合Tl由尺寸類型DiType、尺寸值DiValue、尺寸公差值DiITValue、上偏差UpDeviation、下偏差LoDeviation等五部分組成,如公式(7)所示:
Tl={DiType, DiValue, DiITValue, UpDeviation, LoDeviation}
(7)
基準集合Da表示零件上可以標注一個或n個基準,如公式(8)所示:
Da={Da1,Da2,…,Dan}
(8)
坐標集合Co包括局部坐標和零件坐標,如公式(9)所示:
Co={Co1,Co2}
(9)
根據以上測量零件的數據集構成形式,為生成具有基準的某一公差框圖中公差標注和基準標注的探測系統方案的先后順序,有如下定義:
定義1:根據文獻[11]中總結出的38種具體公差類型,假設將38種不同的公差項目標注在m個不同幾何特征的要素上,則它們相互關聯的映射關系可以用矩陣TMS,m×38表示,而對元素apq(p=1,2,…,m且q=1,2, …,38)有如下定義:如果公差項目與幾何要素存在關聯關系,則apq=1;否則apq=0,如公式(10)所示:
(10)
定義2:假設m個不同幾何特征的要素與n種不同基準的關聯關系可以用矩陣TMP,m×n表示,而對元素Rlk(l=1,2,…,m且k=1,2,…,n)有如下定義:如果基準與幾何要素存在關聯關系,則Rlk=1;否則Rlk=0,如公式(11)所示:
(11)
2 零件PMI信息表示的本體模型
為使計算機能夠理解零件PMI信息表示的工程語義,實現異構CAx系統的知識重用和智能推理,主流的方法之一是采用OWL+[10-12]。因此,本文作者采用OWL+Jena的方法,建立能夠被計算機自動讀取和自動理解的本體模型,即術語模板,為自動生成探測系統方案奠定基礎。
2.1 本體中的內容
零件信息的本體模型即采用基于本體的方法定義要素和標注等信息所需要的術語的本體模型。該模型是特定類(子類)和類(子類)的屬性的有限集合。根據第1節中數據集和關聯關系,可以建立零件信息的本體模型的有限集合。
(1)本體中的類,即表示一元關系的術語。根據公式(1)—公式(3)構建本體模型所需要的類,包括零件類(Part)、幾何特征類(Characteristics)、要素類(Feature)、標注類(Label)和坐標類(Coordinate)。
(2)本體中的子類,即表示參與構成類的術語。根據公式(3)(5)(6)等構建測量零件信息表示的本體模型所需要的子類,如表1所示。
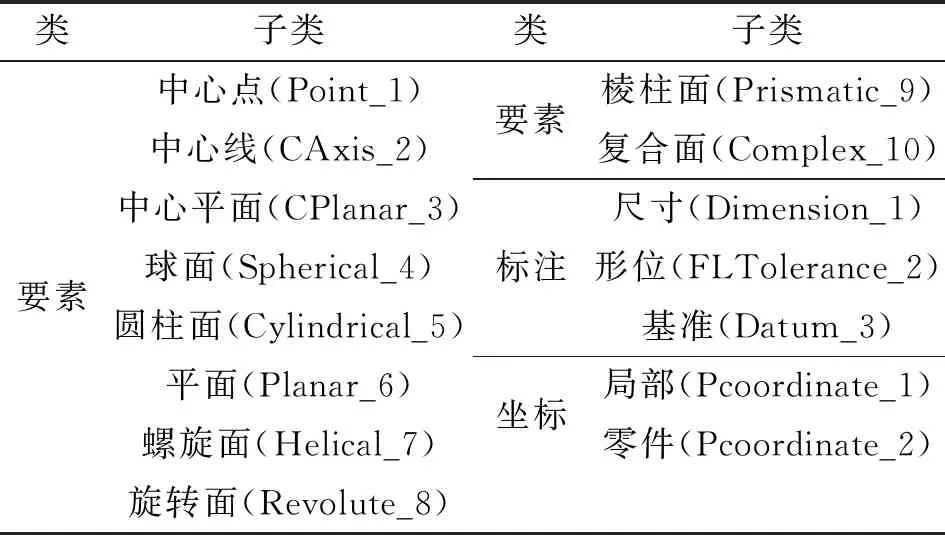
表1 本體的子類
(3)本體中的個體,代表由一個或多個參數精確定義本體中類或子類的實例。從MBD中直接獲取個體名,如圖2所示,面類Plannar_6有7種個體,分別記為Plannar_6-1、Plannar_6-2,…,Plannar_6-7,其他類也是如此。
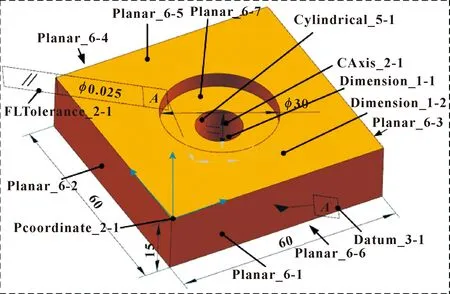
圖2 零件的個體標記
(4)本體中的屬性:對象屬性表示個體與個體之間的二元關系,數據屬性表示個體與數據的關系。例如在圖2中,個體Cylindrical_5-1與個體CAxis_2-1屬于對象屬性,具有關聯關系。
2.2 本體模型的基本結構
根據第1節中構建的信息模型和上述本體的知識,構建面向CMM探測系統智能配置的零件PMI信息本體模型如圖3所示,其各屬性的含義如下:
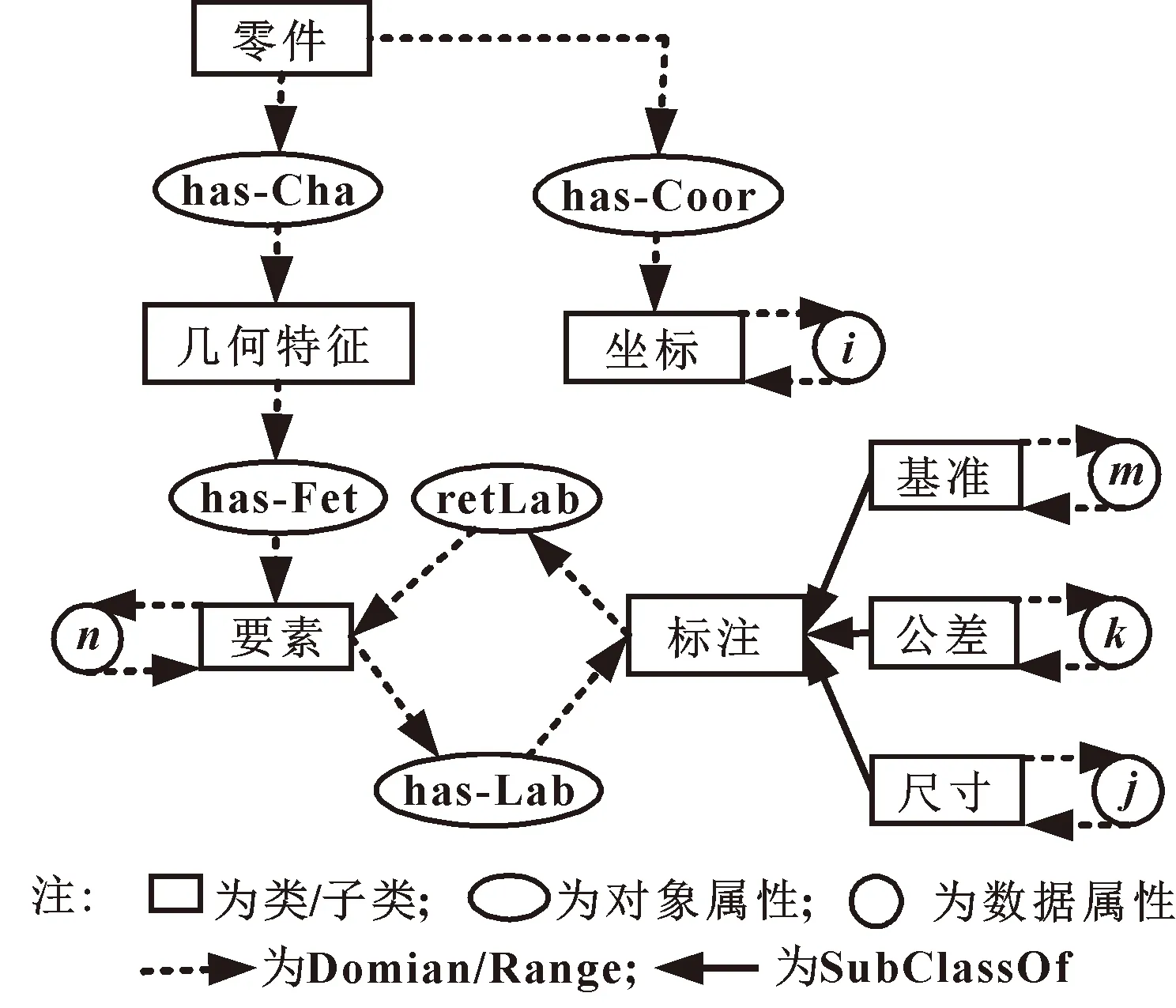
圖3 本體模型的基本結構
(1)根據公式(6)構建數據屬性k=FLToType,FLToValue,Datum,FLToVaPrinciple,DaPrinciple_1,DaPrinciple_2,DaPrinciple_3,分別表示公差類型、公差值、公差基準、公差值有公差原則、第一基準有公差原則、第二基準有公差原則、第三基準有公差原則。
(2)根據公式(7)構建數據屬性j=DiType,DiValue,DiITValue,UpDeviation,LoDeviation,分別表示尺寸類型、尺寸值、尺寸公差值、上偏差、下偏差。
(3)根據公式(8)構建數據屬性m=Datum,表示標注在要素表面上的公差基準。
(4)根據公式(9)構建數據屬性i=Vector_i,Vector_j,Vector_k,分別表示坐標系X、Y、Z軸的位置和指向。
(5)根據公式(2)(3)(10)(11)構建零件PMI信息表示的本體模型所需要的對象屬性,如表2所示。根據定義域和值域的屬性關系,構建斷言公式集,包括:要素和標注之間的從屬關系斷言公式集AA、尺寸標注的斷言公式集AB、形位公差標注的斷言公式集AC和基準標注的斷言公式集AD。構建方法:例如令要素類(Feature)和標注類(Label),對象屬性has_Lab表示要素與標注之間的從屬關系。如圖2所示,當圓柱面(Cylindrical_5)標注公差要求(FLTolerance_2)時,則表示為has_Lab(Cylindrical_5-1, FLTolerance_2-1),斷言公式集AA為要素與標注之間的從屬關系斷言公式的有限集合。
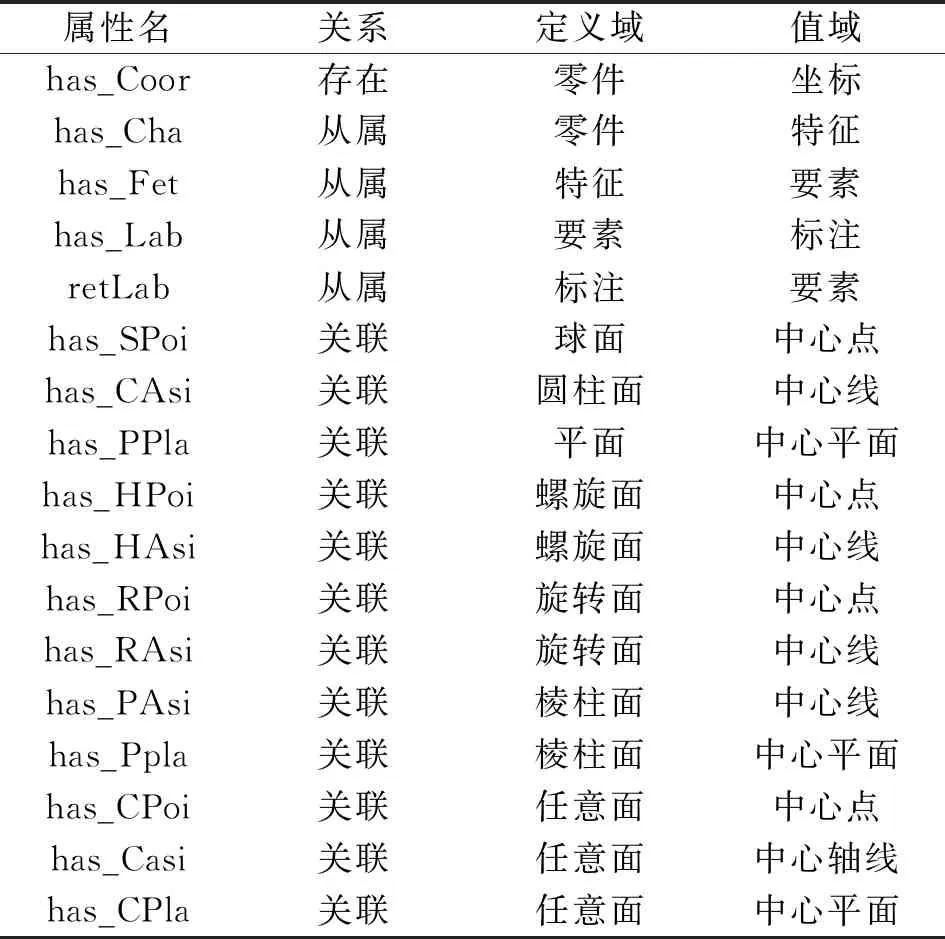
表2 本體的對象屬性
3 探測系統的方案推理
此節根據以上零件PMI信息表示的本體模型,構建探測系統的本體。首先,分析公差框圖中是否有基準,如果有基準,則推理公差要素和基準要素的探測系統方案的生成順序;然后,分析公差指標、幾何要素尺寸與探測系統方案的影響關系,構建探測系統的推理規則;最后,研究探測系統的智能配置方法。
3.1 公差標注和基準標注探測系統方案的生成順序
同一個公差框圖中,公差標注與基準標注一般在不同要素上,以實現零件形位公差的智能檢測。根據測量原理以及基準優先級[4],推理公差標注和基準標注的探測系統方案的生成順序,有如下定義:
定義3:公差框圖中沒有基準,生成公差要素的探測系統方案;
定義4:公差框圖中有1個基準,如圖2中的平行度,則生成的探測系統方案順序為:先基準平面(A),再公差要素;
定義5:公差框圖中有2個基準,如圖1中的位置度,則生成探測系統方案順序為:先第一基準平面(A),再第二基準平面(B),最后公差要素;
定義6:公差框圖中有3個基準,則生成探測系統方案順序為:先第一基準,再第二基準,其次第三基準,最后公差要素。
3.2 探測系統的配置推理規則
探測系統由測頭、測座和探針等組成。測頭是CMM的關鍵部件,不同測量零件需要選擇不同精度和功能的測頭[4]。接觸式的測頭通常分為接觸式觸發測頭和接觸式掃描測頭。測頭一般通過測座固定,把測頭的信號傳遞到CMM中。為從零件信息推理探測系統方案,在零件PMI信息表示的本體模型的基礎上添加探測系統內容,得到的本體稱為探測系統本體模型。
構建類和子類以及個體。構建方案類(DetectionSystem);構建類的子類:測頭子類(Top)、測座子類(Seat)。把接觸式觸發測頭P20SF、TP7M、TP200、TP800和接觸式掃描測頭SP600系列(SP600、SP600M、SP600Q)、SP25、SP80、TRAX,設為測頭子類的個體。如表3所示,A類表示M8+PAA#PH10M、M8+PAA#PH10MQ、M8+PAA#PH6M;B類表示自動更換測座PH10M、PH10MQ、PH6M;C類表示與測量機主軸直接連接(SP),設A、B、C為測座子類的個體。
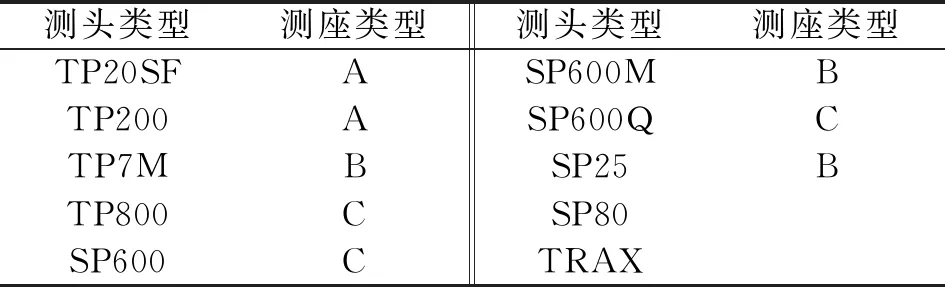
表3 測頭和測座[4]
構建屬性。對象屬性has_Top表示關聯關系,定義域為測頭類、值域為標準類;對象屬性has_Seat表示關聯關系,定義域為測座類、值域為標準類。
構建推理規則。文中使用Jena的語法格式對選擇規則進行編寫和表示。
構建規則1~2。規則1:測量要素的基本尺寸值小于100 mm的零件稱為小型;大于等于100 mm小于300 mm的零件稱為中型;大于等于300 mm的零件,稱為大型。規則2:尺寸公差值T大于IT8級稱為低精度,否則稱為高精度;形位公差值T大于IT8級稱為低精度,否則稱為高精度。例如[rule:(?x :DimensionValue ?a),math:lessThan(?a,’100’)->(?x :DimensionType ‘smallSiz’)].,含義為:測量要素的基本尺寸值小于100 mm的零件,要素尺寸為小型。
構建規則3:根據公式(6)得到一個需要測量的公差框圖中是否有基準,由定義3~6設計公差標注和基準標注的探測系統方案的生成順序,再根據定義1(定義2)得到公差標注(基準標注)對應的要素。
構建規則4~6。影響測頭選擇的因素如表4所示,其中:大、中、小表示零件的基本尺寸;高、低表示公差精度等級;對象D為尺寸公差、E為形位公差,“”表示該行測頭的影響因素,當每行滿足所有因素時才選擇對應的測頭。規則4[4]:當測量尺寸、間距或位置,不強調其形狀誤差,而且測量空間狹窄時,應盡量選觸發測頭。規則5[4]:掃描測頭具有高速采集數據的優點,采集的數據不僅可以用來確定零件的尺寸及位置,更重要的是能用眾多點來精確地描述形狀、輪廓,特別適用于對形狀、輪廓有嚴格要求的零件。規則6:當選擇掃描測頭時,其順序為SP600、SP600M、SP600Q,例如[rule: (?x :DimensionType′middleSize′),(?x :PrecisionGrade ′lowPrecision′) -> (?x :has_Top :TP7M)],含義為:測量要素的尺寸時,一般精度且中型尺寸時選用觸發測頭TP7M。
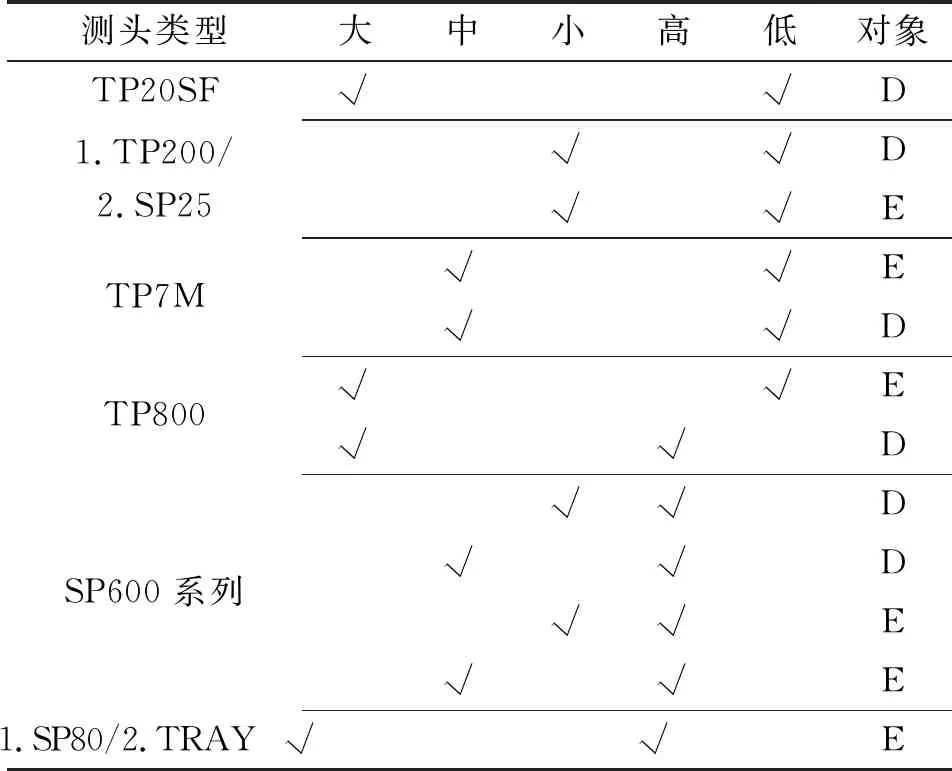
表4 影響測頭選擇的因素
構建規則7:在得到測頭類型后,根據表3信息,推測測頭對應的測座類型。
3.3 探測系統的智能配置方法
利用由CAD系統提取GD&T信息后直接生成.owl文件的算法,依照以上所建立的零件PMI信息表示的本體模型所生成的本體稱為探測系統本體模型。將ontoSTEP本體與探測系統本體模型融合后,可得到包含PMI信息的探測系統本體。每次測量新的公差需要調用探測系統本體模型,實現了模型重用。在調用探測系統本體之前,先生成聲明文本,其中包括命名空間聲明與頭部聲明。
首先,調用探測系統本體模型。在本體中,類和屬性共同組成術語,個體則作為實例。依照之前建立的本體模型定義的類和屬性,獲得的術語集文本可實現重用。其次,生成實例集文本。實例集文本實質上由定義塊組成,這些定義塊可劃分為若干類別。對每一類別進行抽象與剝離,可得到不含個體信息的語塊模板庫。最后,從CAD系統中提取個體信息,與相應的語塊模板進行組裝,便可得到一個完整的定義塊。如圖4所示為圓柱面Cylindrical_5-1對平面Planar_6-1具有平行度公差的測量零件信息提取與轉換過程。
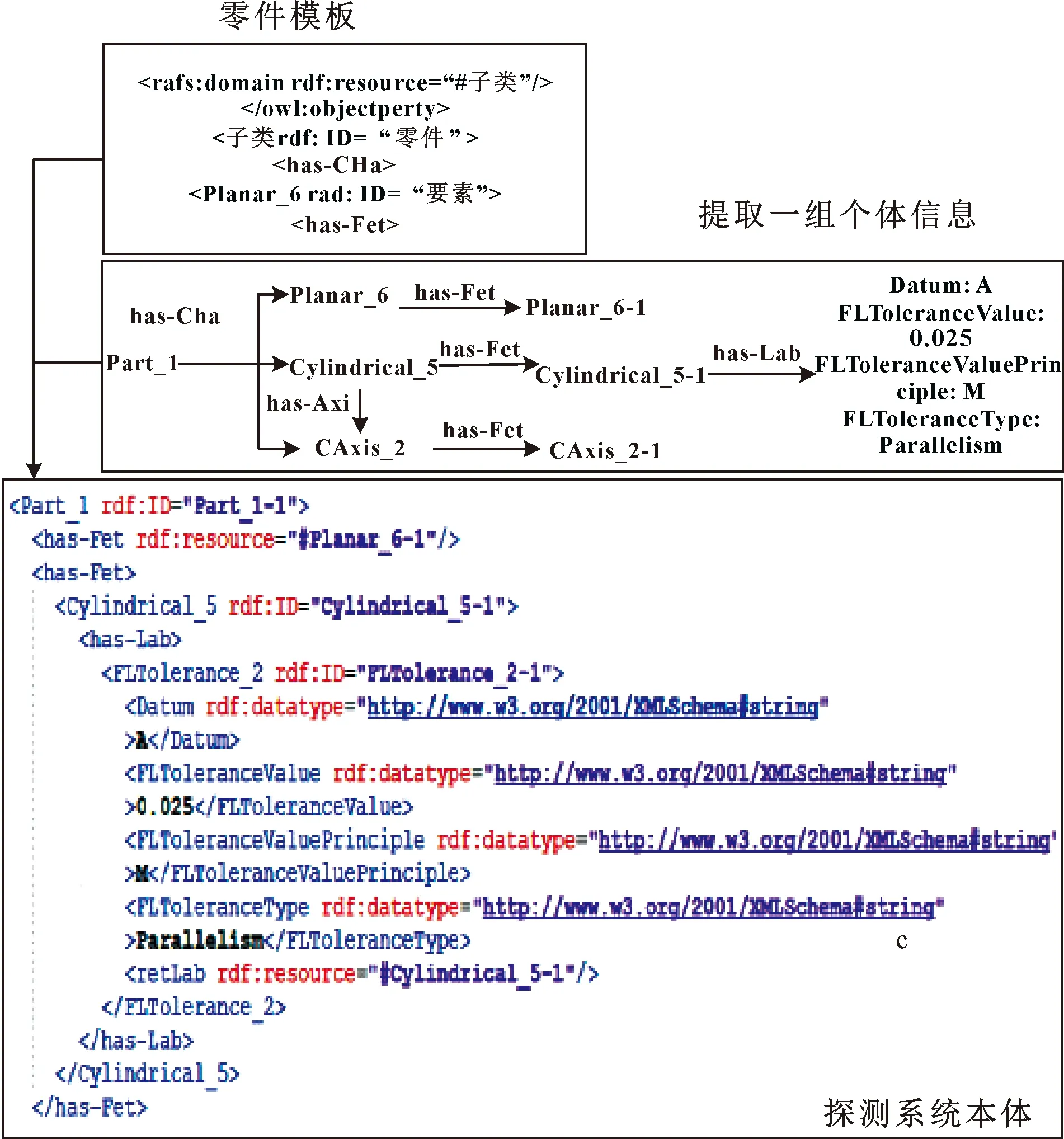
圖4 測量零件信息提取與轉換過程
Apache Jena是一個用于構建語義Web和鏈接數據應用程序的Java框架,它向用戶提供通用規則以進行知識推理,輸出合理推理結果。為實現探測系統方案的推理,則需要將基于本體的結構化知識和基于Jena的規則轉化為Jena通用規則推理機所能理解和推理的知識。因此,本文作者采用Jena通用規則推理機實現探測系統的方案推理。具體推理流程如圖5所示。

圖5 推理的工作流程
(1)設計者基于MBD技術建立零件模型并將它存儲在計算機中;
(2)由表2中的對象屬性構建要素和標注之間的從屬關系斷言公式集AA;由數據屬性構建尺寸標注的斷言公式集AB、形位公差標注的斷言公式集AC和基準標注的斷言公式集AD;
(3)根據零件模型和探測系統本體模型,調用生成.owl文本的算法,生成包含個體的探測系統本體;
(4)在探測系統本體的基礎上,將推理規則導入到知識庫,選定需要測量的公差項目,推理得到該公差項目所需要的探測系統方案(記為AE),最后保存為本體.owl格式。
4 實例應用驗證
在Eclipse環境下,使用Java語言開發探測系統的智能配置程序。利用某公司的凹模沖壓零件的圓柱面(Cylindrical_5-1)形位公差對探測系統的智能配置進行驗證,如圖2所示。
基于MBD技術在軟件UG10.0中建立零件三維模型,個體和屬性標記如圖2所示。根據零件三維模型和探測系統本體模型,包括:線的個體:CAxis_2-1和CPlanar_3;面的個體:Cylindrical_5-1、Planae_6-1;標注的個體:FLTolerance_2-1,Dimension_1-1,Datum_3-1;測頭的10種個體和測座的3種個體。
斷言公式集AA。根據要素與標注之間的從屬關系以及表2對象屬性,得到要素和標注之間從屬關系的斷言公式集AA:
AA={Cylindrical_5(Cylindrical_5-1), Planae_6(Planae_6-1), FLTolerance_2(FLTolerance_2-1), Dimension_1(Dimension_1-1), Datum_3(Datum_3-1), has_Lab(Cylindrical_5-1, FLTolerance_2-1), retLab(FLTolerance_2-1, Cylindrical_5-1), has_Lab(Cylindrical_5-1, Dimension_1-1), retLab(Dimension_1-1,Cylindrical_5-1), has_Lab(Planae_6-1,Datum_3-1), retLab(Datum_3-1, Planae_6-1)};
由圖2中圓柱面的尺寸標注Tl={zhijing, 12}、形位公差標注To={Parallelism, 0.025, A}、基準A的尺寸標注Tl={xianxing, 60},根據數據屬性得到尺寸標注的斷言公式集AB、形位公差標注的斷言公式集AC和基準的斷言公式集AD:
AB={FLTolerance_2(FLTolerance_2-1), FLToType(FLTolerance_2-1, Parallelism), FLToValue(FLTolerance_2-1, 0.025), Datum(FLTolerance_2-1, A), has_Rla(FLTolerance_2-1, Cylindrical_5-1), Label_Tolerance(FLTolerance_2-1, CAxis_2-1)};
AC={Dimension_1(Dimension_1-1), DiType(Dimension_1(Dimension_1-1, zhijing), DiValue(Dimension_1(Dimension_1-1), 12)};
AD={Datum_3(Datum_3-1),Datum(Datum_3-1, A)};
智能推理探測系統配置。首先在探測系統本體模型上調用生成.owl文本的算法,得到包含個體的探測系統本體;然后,將推理規則添加到知識庫;最后,推理得到測頭和測座的可選類型。測量Cylindrical_5-1時的推理結果,如圖6所示。先得到基準平面(A),再公差要素,即AE(Planae_6-1,Cylindrical_5-1)={has_Top(1.TP200), has_Top(2.SP25), has_Seat(A), has_Seat(B)}。根據推理結果可知:測量Cylindrical_5-1時,1.TP200表示優先選用觸發測頭TP200,2.SP25表示其次選用掃描及觸發兩用測頭SP25;TP200對應的測座為A類(M8+PAA#PH10M,M8+PAA#PH10MQ,M8+PAA#PH6M);SP25對應的測座為B類(自動更換測座PH10M,PH10MQ,PH6M),最后生成.owl文件。由此可知,本文作者從10種測頭和7種測座中智能選擇合適的2種測頭和其對應的測座。
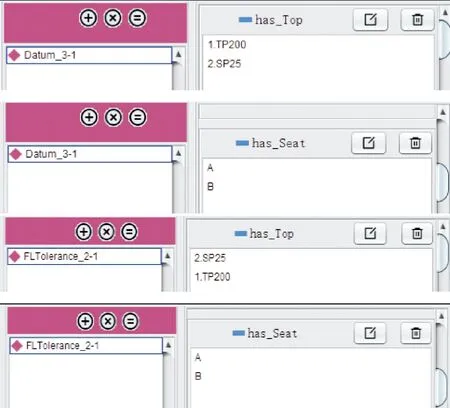
圖6 推理結果
相同條件下,將基于多色集合理論的方法用于此實例[14],在2種接觸式測頭的類型中選擇1種合適的測頭,得到的測頭型號為SP25。
考慮成本和滿足測量要求的情況下,相比于掃描式測頭,應優先選用接觸式測頭[4],則此實例中優先選用接觸式測頭(TP200)、其次選用掃描式測頭(SP25)的結果更合理。因此,本文作者通過構建基于本體技術的知識庫系統,不僅使零件信息工程語義能被計算機理解,實現語義傳遞,而且能夠從多種探測系統配置中智能推理出合理的測頭和測座。
5 結論
(1)本文作者研究了探測系統方案自動生成,其特征在于構建能被計算機理解的工程語義的探測系統本體模型;設計生成.owl文件的算法得到探測系統本體,構建探測系統方案選擇的規則。
(2)以某公司零件為例,推理得出若干種可以采用的方案,與多色集合的方法相比,既能實現零件工程語義表示與傳遞,又能從多種探測系統的方案中智能推理出更合理的測頭、測座方案供用戶選擇。
(3)進一步的研究可以從以下兩方面著手:一是增加非接觸式測頭選擇的本體;二是探測測頭可達性分析。首先,應建立數學庫,計算測量點數、點的位置和探針直徑;然后,設計探針的數量、位置和方向;最后,分析測量某點的測頭是否可達。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03
