X舵水下潛航器改進滑模控制策略研究
2022-10-14 03:04:46段應坤
兵器裝備工程學報 2022年9期
劉 勝,段應坤,張 晶
(1.哈爾濱工程大學, 哈爾濱 150001; 2.中船黃埔文沖船舶有限公司, 廣州 510715)
1 引言
隨著海洋工程的發展,各式各樣的水下潛航器開始被廣泛應用于海洋探索和海洋資源開發。自主水下航行器(autonomous underwater vehicle,AUV)作為重要的海洋裝備,在水下檢測和海洋探索的地位越來越重要。
自主式水下潛航器(AUV)作為獨立的自主智能系統,可以在水下獨立完成各項復雜任務。但由于海洋環境的復雜性,這便要求AUV具有穩定可靠的水下航行性能。X舵AUV由于改進了其尾部操縱面,大大提高流了其在水下的可操作性及水動力性能,X舵AUV其方向舵在AUV的船首和船尾形成X形狀,故稱之為X舵,其4個方向舵可以獨立運行,與傳統的交叉舵相比,具有舵效高、機動性強、噪聲低、抗沉性強等優點,當前正在服役的德國212A型以及瑞典的“哥特蘭”級潛艇均采用的是X形尾舵。隨著軟硬件的發展,X舵AUV開始逐漸應用于科研和民用領域。
由于水下環境的復雜性及任務的多變性,這便要求X舵AUV具有穩定可靠的控制方法。文獻[7]以對角聯動的AUV為對象,以PID為主要控制器,實現了對AUV的有效控制,并進行了湖上及海上實驗。文獻[8]基于AUV模型已知和模型未知情況下設計了改進的滑模控制方法,能夠實現控制量的平滑輸入,控制效果良好。文獻[9]基于滑模控制提出了X舵水下航行器在傳感器失效情況下的最優魯棒軌跡跟蹤,并通過仿真實驗驗證了其有效性。部分研究通過深度挖掘算法及X舵本身的優勢,在一定故障范圍可實現容錯控制,文獻[11]基于設計了在雙舵、三舵及四舵工作模式下的AUV控制體系,能實現執行器在一定故障范圍的容錯控制。本文中研究對象為一種可獨立運動的X舵水下潛航器,首先建立了X舵AUV控制體系并設計改進的滑模控制器,其次對方向舵舵力分析及控制分配算法設計,最后通過仿真實驗驗證改進控制器的有效性。
2 X舵水下潛航器運動控制體系及建模
2.1 運動控制體系結構
X舵水下潛航器是典型的過驅動系統,也即是控制量維數大于被控量維數,因此相對與傳統的十字舵水下潛航器,其運動控制體系結構相對更加復雜,X舵水下潛航器每個舵的操作都會在6個自由度上引起潛航器整體方向信息的變化,因此在在控制體系結構中還需要考慮控制力在方向舵上分配問題。控制分配是控制指令與執行機構之間的映射,根據系統控制要求和約束條件對方向舵進行合理配置。不僅如此,控制分配還可以發揮系統的過驅動的性能,通過發揮剩余方向舵的性能,從而實現容錯控制。X舵水下潛航器運動控制體系結構如圖1所示。

圖1 X舵AUV運動控制體系結構框圖Fig.1 X-ruderAUV motion control system
2.2 X舵水下潛航器建模
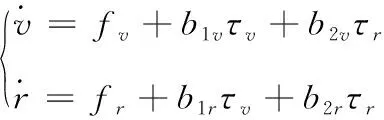
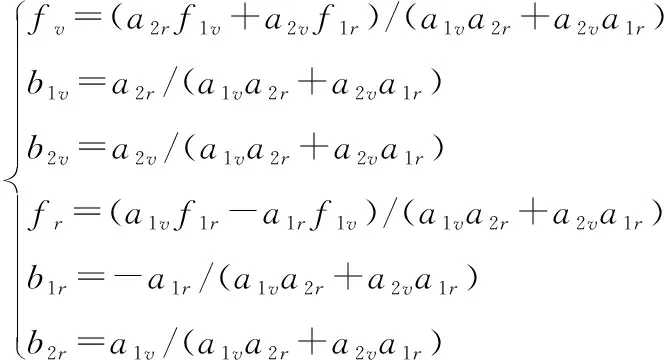
為了便于描述X舵AUV在水下六自由度運動,參考SNAMT和ITTC推薦的坐標系于名詞術語,本文中設計了2個坐標系,分別位隨體坐標系-和大地坐標系-,4個舵位于船尾,且舵軸中心線與AUV中線面之間的夾角為45°,相鄰2個舵之間的角度為90°,4個舵形狀相同且可獨立操控,如圖2所示。文獻[8]將AUV運動學模型解耦成為一個水平子系統和一個垂直子系統,本文中基于該解耦的運動學模型展開研究,其中水平子系統可以描述為:
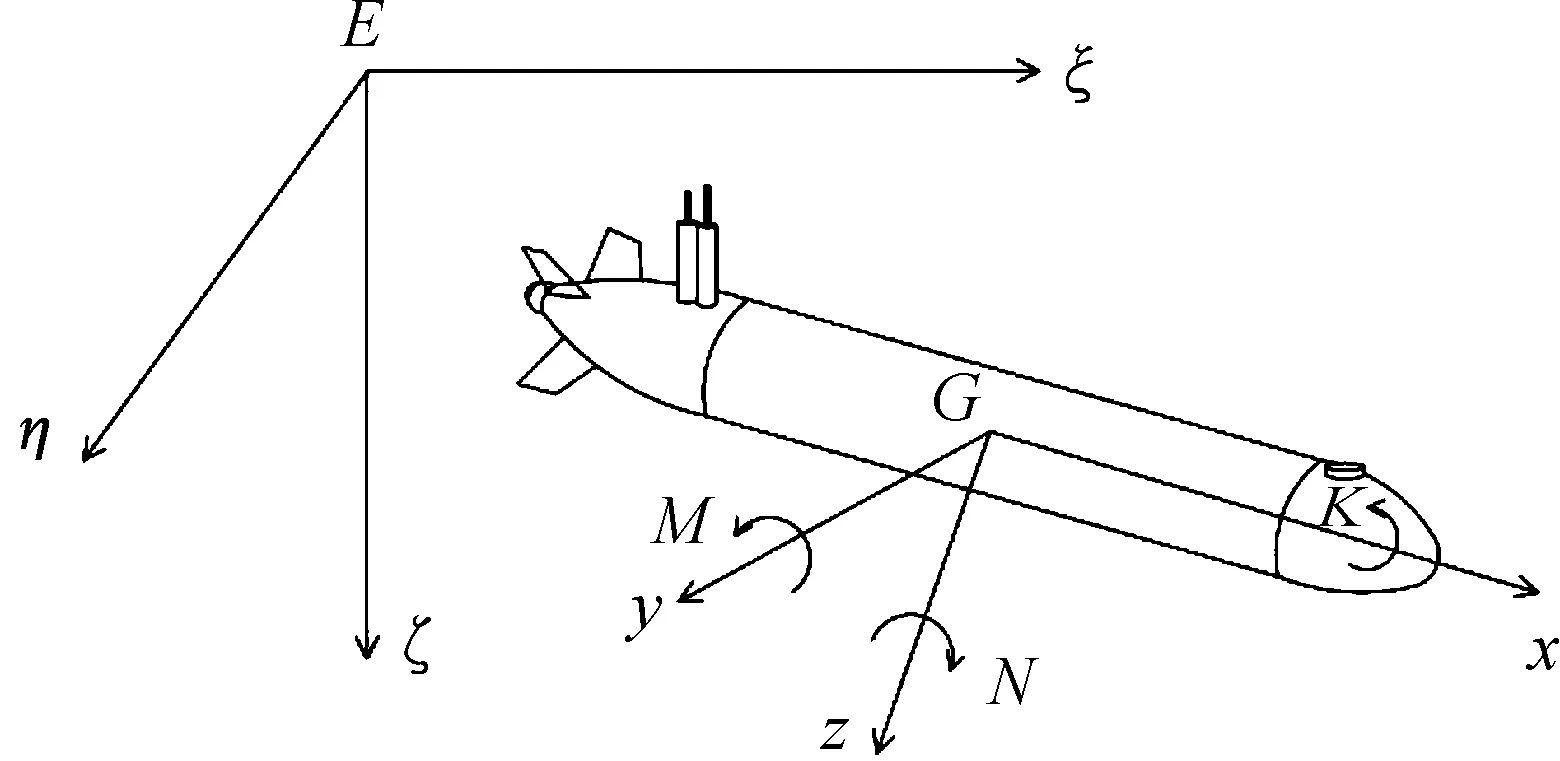
圖2 X舵AUV結構示意圖Fig.2 X-rudder AUV coordinate system definition
(1)
其中


+||||+||||
1=++||||+||||
垂直子系統可以描述為:
(2)
其中


+||||+||||
1=++||||+
||||-sin
式中:代表潛航器質量;、、代表線速度;、、代表角速度;、分別表示橫擺力和偏航力矩;、垂蕩力和俯仰力矩,其他參數可通過仿真軟件直接或者間接測得水動力系數。
針對X舵潛航器的控制問題,潛航器的方向舵以及其控制分配問題的研究也是非常必要的,因此有關方向舵的建模及受力分析在第四節進行詳細闡述。
3 X舵水下潛航器控制策略設計
滑模控制作為應用較為普遍的控制策略,具有結構簡單,響應速度快,魯棒性強等優點。本文中基于滑模控制策略本身固有的高頻抖振問題,設計一種改進的趨近律來逼近滑模面,利用飽和函數代替符號函數減小其對控制效果帶來的不利影響,在此基礎上設計趨近律來調節運動點在不同區段到達滑模面的速度,以提升整體控制策略的控制效果。


(3)
其中 為期望的航向,設計滑模函數為:
(4)
其中為正常數,對所設計滑模函數求導可得:

設計改進的冪次趨近律為:

(5)

定義Lyapunov函數為:

則

根據Lyapunov穩定性理論,設計控制律為:

(6)
進一步地,驗證所改進滑模控制器的穩定性:
(7)



(8)
4 X舵水下潛航器控制分配設計
4.1 X方向舵舵力及控制效率矩陣分析
X舵水下潛航器4個方向舵位于船尾,且舵軸中心線與潛航器中線面之間的夾角為45°,相鄰兩方向舵之間的角度為90°,4個方向舵形狀相同且可以獨立操作,其配置形式如圖3所示。如果方向舵偏轉方向與圖中所示方向相同,則表示方向舵偏轉角度為正,相反則為反。為了方向舵的舵力分析,假設控制指令與執行機構的輸出之間的映射為線性,且不考慮方向舵與潛航器及舵與舵之間的耦合問題。
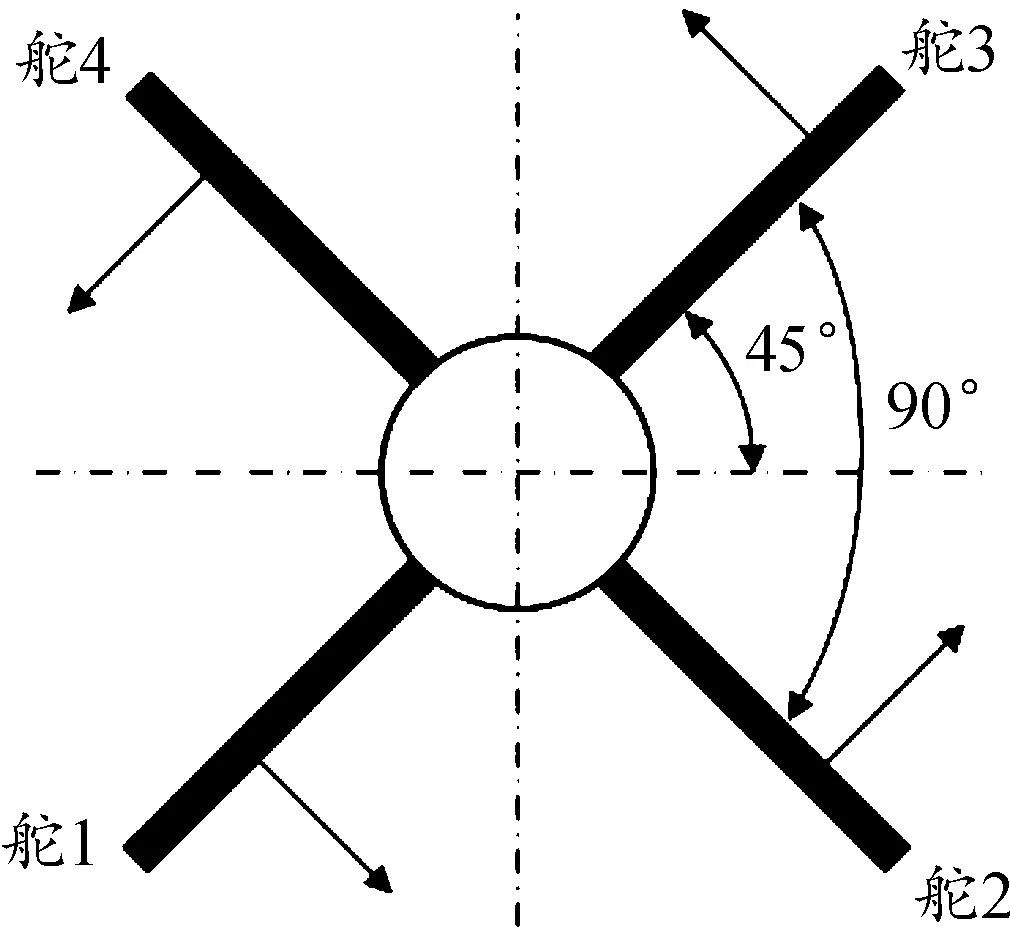
圖3 X方向舵的配置形式示意圖Fig.3 The configuration of the X-rudder
因此由文獻[10]中舵升力計算公式為:
(9)
式中:為升力系數;為流體密度;為舵的受力面積;為水流速度。其中升力系數與方向舵的舵角近似線性關系,因此可以導出方向舵的力矩表達式為:

(10)
為實現舵潛航器俯仰和艏向控制,因此可得相應的橫向力矩和垂直向力矩為:
(11)
最終可得舵水下潛航器期望的控制力矩與方向舵輸入指令之間的映射關系為:=,也即是:

(12)

其中為舵葉的偏航力矩系數,為舵葉的俯仰力矩系數。
4.2 X舵水下潛航器控制分配
X舵水下潛航器作為一種過驅動控制系統,控制分配技術是必不可少的。控制分配技術即是在考慮執行器約束條件下,以控制分配精度和控制能耗為目標函數,以達到最優的控制分配效果。文獻[14]提出一種基于L’evy flight理論的控制分配算法,取得不錯的控制分配效果,文獻[15]提出一種基于改進的二次規劃算法智能控制分配算法,減少了算法迭代時間,提高了控制分配效率。本文中采用文獻[8]中的二次規劃算法對該問題進行描述:
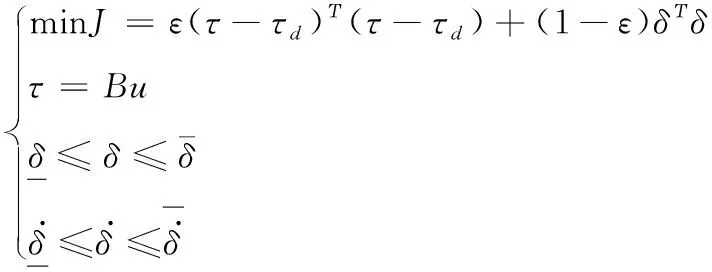
(13)

算法迭代過程如下:
1選擇優化變量和Hessian矩陣的初始狀態;
2求解QP子問題,選擇迭代點;
3基于更新優化變量和;
4以拉格朗日形式計算目標函數;
5判斷是否收斂,如果是,跳轉步驟6,否則,重復步驟2~5;
6算法結束。
5 仿真驗證
為了驗證所設計控制體系的有效性,本文中以X舵水下潛航器為對象,采用文獻[14]中的潛航器參數,完成俯仰和航向控制仿真,并與未改進滑模和PID控制器進行對比。其中控制器參數=05,===1,=05,=2,初始俯仰角為0°,目標俯仰角設置為60°,初始航向角為0°,目標航向角設置為-10°;為進一步驗證改進滑模控制策略的有效性,對AUV進行定深路徑跟蹤仿真,初始點設置為(-1 000,-3 000,60),路徑點設置為(3 000,1 000,60),(2 000,2 000,60),(-2 000,-2 000,60),(-3 000,-1 000,60),(1 000,3 000,60),方向舵最大舵角設置為30°,最后給出路徑跟蹤過程中方向舵的控制輸入變化曲線。
如圖4和圖5為X舵潛航器航向和俯仰控制仿真曲線。可以看出,3種控制方法都能使潛航器平穩的接近所需的航向角和俯仰角,并最后達到穩定狀態。但相比于未改進的滑模和PID控制方法,改進的滑模控制方法有著更快的收斂速度,表明該方法在航向和俯仰控制方面性能更加突出;控制過程平穩未出現振蕩和波動,且超調更小,削弱了系統臨近穩態時的高頻抖振的不足,驗證了前文中對改進滑模控制策略的優勢分析。
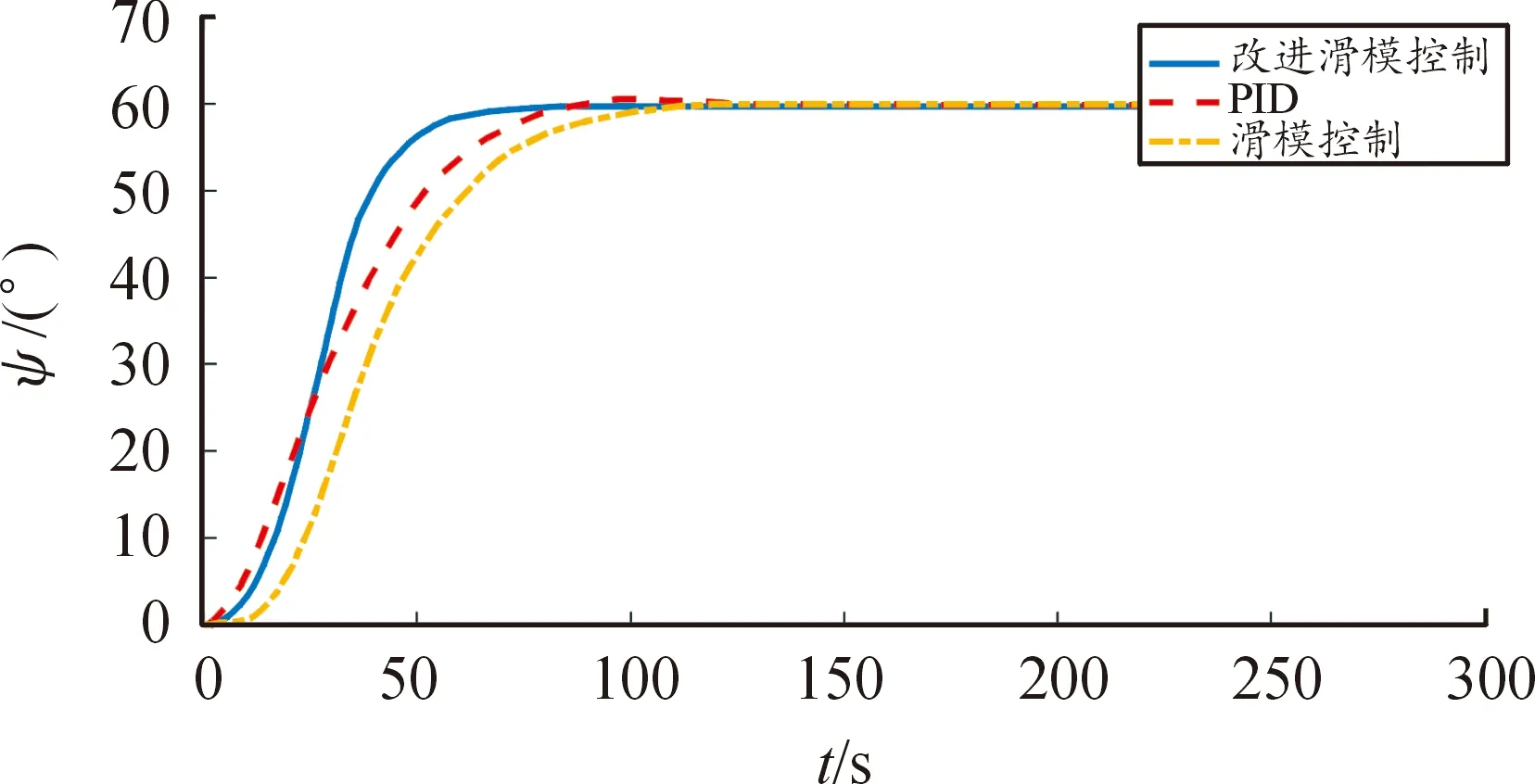
圖4 航向控制仿真曲線Fig.4 Heading control simulation diagram

圖5 俯仰控制仿真曲線Fig.5 Pitch control simulation diagram
表1給出了3種控制方法在航向和俯仰控制穩定到達穩態值的調節時間,改進的滑模控制在航向和俯仰控制到達穩態值的時間更短,響應更加快速;表2給出了滑模控制改進前后在航向和俯仰控制的定量,數據表明改進的滑模控制均方誤差更小,進一步證明了改進控制方法的優越性。
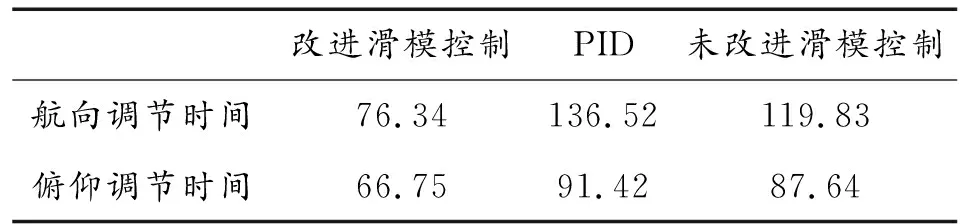
表1 航向和俯仰控制調節時間/sTable 1 Heading and pitch control adjustment time

表2 航向和俯仰控制定量Table 2 Quantitative comparison of heading and pitch control
圖6為潛航器定深情況下的期望路徑曲線和跟蹤路徑曲線,結果可以看出,潛航器可以沿著所需的路徑移動,每次轉彎時都會偏離期望軌跡,但在控制器干預下很快返回路徑。圖7為路徑跟蹤過程中方向舵的控制輸入曲線,可以看出航向變化過程中舵角最后能以平滑的姿態趨于穩定,有效緩解了滑模控制的抖振問題。
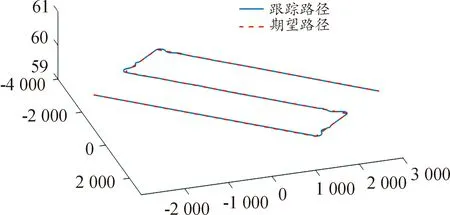
圖6 定深情況下的期望路徑和跟蹤路徑仿真曲線Fig.6 Depth-fixed path tracking simulation diagram
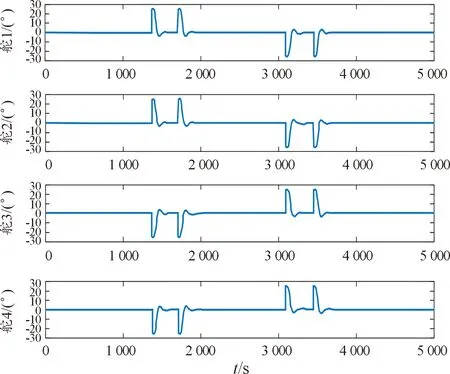
圖7 路徑跟蹤過程中方向舵控制輸入曲線Fig.6 Rudder control input during path following
6 結論
1) 航向控制仿真中,與未改進滑模控制相比,航向調節時間減少了43.49 s;俯仰控制仿真中,與未改進滑模控制相比,俯仰調節時間減少了20.89 s。
2) 通過定量比較,在航向和俯仰控制過程中,改進的滑模控制策略的均方誤差為16.532 3和1.932 5,與未改進滑模控制策略相比更小,表明了改進滑模控制策略優越。
3) 在定深路徑跟蹤過程中,潛航器在控制器下干預下能夠跟蹤期望路徑,舵角輸出平滑且最大舵角未超出30°,表明控制器的有效性且減輕了滑模控制的抖振。
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
鐵道通信信號(2020年9期)2020-02-06 09:15:22
山東冶金(2019年3期)2019-07-10 00:54:04
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
消費導刊(2018年10期)2018-08-20 02:57:02
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16