基于平衡流形展開模型的航空發動機健康參數估計
2022-10-13 04:51:12劉碩碩戚萬領王志濤高楚銘
航空發動機 2022年4期
劉碩碩,戚萬領,王志濤,高楚銘
(哈爾濱工程大學動力與能源工程學院,哈爾濱 150001)
0 引言
航空發動機控制系統根據當前飛行條件和油門桿角度(Power Lever Angle,PLA)調節被控參數的設定值,如轉速、壓比等,閉環調節達到目標推力。但是隨著發動機長時間服役,造成葉片積垢、葉尖磨損、高溫蠕變,從而使發動機部件性能退化,PLA與推力等參數的對應關系改變,以至無法實現目標推力。為實現發動機推力恢復,需探究有效的發動機狀態參數估計方法,對部件健康參數進行準確評估。自20世紀80年代以來,國內外基于發動機線性模型和部件級非線性模型開展了多種優化估計算法研究,其中尤以卡爾曼濾波估計算法使用最為廣泛。基于線性狀態空間模型的標準卡爾曼濾波參數估計最早成功使用。在全包線內運行時,通過將設計好的各穩態點卡爾曼增益預先存為矩陣,進行插值調度使用。但由于狀態空間模型為線性化近似模型,對非線性系統動態特性近似有限,當其進行多個健康參數退化估計時,雖能定位到退化部件,但卻存在較大的穩態誤差;而基于部件級模型的非線性卡爾曼濾波參數估計則受限于部件級模型復雜程度,計算量大、實時精度差,早期根本無法作為機載模型使用。平衡流形展開(Equilibrium Manifold Expansion,EME)模型的提出,則可有效彌補線性空間模型以及部件級模型的不足。
EME模型是1個原非線性系統的近似非線性模型,與線性模型相比具有良好的近似性。2011年,趙輝對此模型進行全面分析,界定了與其他模型的聯系與區別之后,基于EME模型開展控制算法研究,并逐漸成為熱點;呂鋮坤、馬欣彤在其后將該模型應用于控制領域,也佐證了該模型具有良好的適用性和較大的應用潛力。然而,EME模型在參數估計方面的應用研究卻鮮有報道。2013年,陳可嘗試用未考慮退化的EME模型代替部件級模型進行氣路故障診斷,但其采用線性卡爾曼濾波器進行估計,忽略了平衡流形模型為非線性模型這一事實;此外,只給出了單個健康參數退化時的估計結果,而對發動機運行過程中最常見的參數退化方式——多健康參數同時退化并未進行討論。
本文基于EME模型采用非線性卡爾曼濾波器進行多個健康參數退化估計。
1 平衡流形展開模型
1.1 平衡流形展開模型建模理論
在飛行條件一定時,航空發動機的非線性系統方程為

式中:x∈R,為狀態向量;u∈R,為控制向量;y∈R,為輸出向量;f和g為連續可微的非線性函數。
定義非線性系統(式(1))的平衡流形為系統平衡點的集合

平衡流形用調度變量α表示為

則將式(1)在由α決定的平衡點( x,u,y)處進行泰勒展開,保留1階項,可得該點的線性化模型族

式中:A,B,C,D為4個雅克比矩陣,Δx=x-x(α),Δu=u-u(α)。
為使式(4)成為非線性模型,需另外建立調度參數α與當前工作點( x,u,y)的聯系,由于y與x和u之間為代數關系,只需建立α與x和u之間的關系式
式(5)實質是建立當前工作點(x,u,y)向平衡流形點(x,u,y)的映射。這一映射的設計具有一定的自由度,其惟一的約束要求是能夠將任意穩態點映射到該穩態點本身,即α=a (x(α),u(α))。
1.2 考慮退化的渦扇發動機平衡流展開模型
在飛行條件為H=0、Ma=0時,選擇如下參數來建立EME模型:
(1)x=[n,n],分別表示低壓軸轉速和高壓軸轉速;
(2)u=[W,A],分別表示燃油量和尾噴管喉道面積;
(3)η=[η,η,η,η],分別表示風扇、高壓壓氣機、高壓渦輪和低壓渦輪的絕熱效率;
為保證數值計算的穩定性,各變量均已做相似歸一化處理,限于篇幅不再詳細闡述。
健康因子的作用等同于輸入參數,則考慮部件性能退化的雙軸渦扇發動機線性化模型族式(4)可以展開為

調度參數與輸入參數同維度,取之為、、、、、,映射方程在x ()=x ;u ()=u 中任取6個,本文取為

則聯立式(7)、(8)得到考慮退化的平衡流形展開模型的最終形式

以部件級模型為基礎,采用陸軍等提出的線性擬合法求系數矩陣各元素值,并采用BP神經網絡對平衡流形模型的動態參數、靜態參數進行擬合。
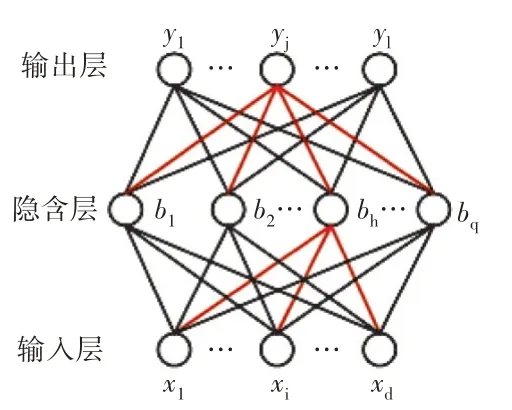
圖1 神經網絡結構
由于參數擬合維度過高,無法可視化展示,限于篇幅,以()矩陣為例,按一定順序列出各點值來展示神經網絡擬合結果,如圖2所示。神經網絡對多維非線性函數擬合具有獨特優勢

圖2 A矩陣神經網絡擬合結果
1.3 模型精度驗證
模型精度直接影響參數估計結果。以最常見的多參數漸變為例,將EME模型和部件級非線性模型的仿真結果進行對比。設置如圖3所示的健康因子退化過程:4種部件效率在第10 s同時開始漸變;經過10 s后,漸變分別降至1.0%、1.5%、2.0%和2.5%;再經過10 s穩定后,漸變再分別降至2.0%、2.5%、3.0%和3.5%,之后保持穩定。

圖3 健康因子退化過程
以高壓軸轉速為例,進行EME模型與部件級模型響應對比,驗證EME模型動態響應,如圖4所示。從圖中可見,2種模型的漸變響應基本重合。所建立的EME模型對原非線性系統具有良好的近似性,可用于健康因子退化估計。

圖4 2種模型高壓軸轉速響應對比
2 卡爾曼濾波參數估計
卡爾曼濾波器又名最佳狀態估計器,本質上是一種最小方差估計方法。通過模型的估計值與實際測量值之間的誤差對狀態不斷更新,使得狀態變量值的誤差方差最小,從而得到最佳估計值。
2.1 擴展卡爾曼濾波器
擴展卡爾曼濾波(Extended Kalman Filter,EKF)是在標準卡爾曼濾波基礎上發展而來的,用于非線性系統參數估計。通過將過程方程和測量方程在某狀態點處進行泰勒展開,求取雅可比矩陣,得到卡爾曼增益后再利用標準卡爾曼濾波算法進行參數估計。
設有噪聲的發動機離散數學模型表示為

式中:和為第1.2節中建立的EME模型的系統方程和測量(輸出)方程;為系統噪聲,為測量噪聲。
假設和都是不相關的高斯白噪聲,則
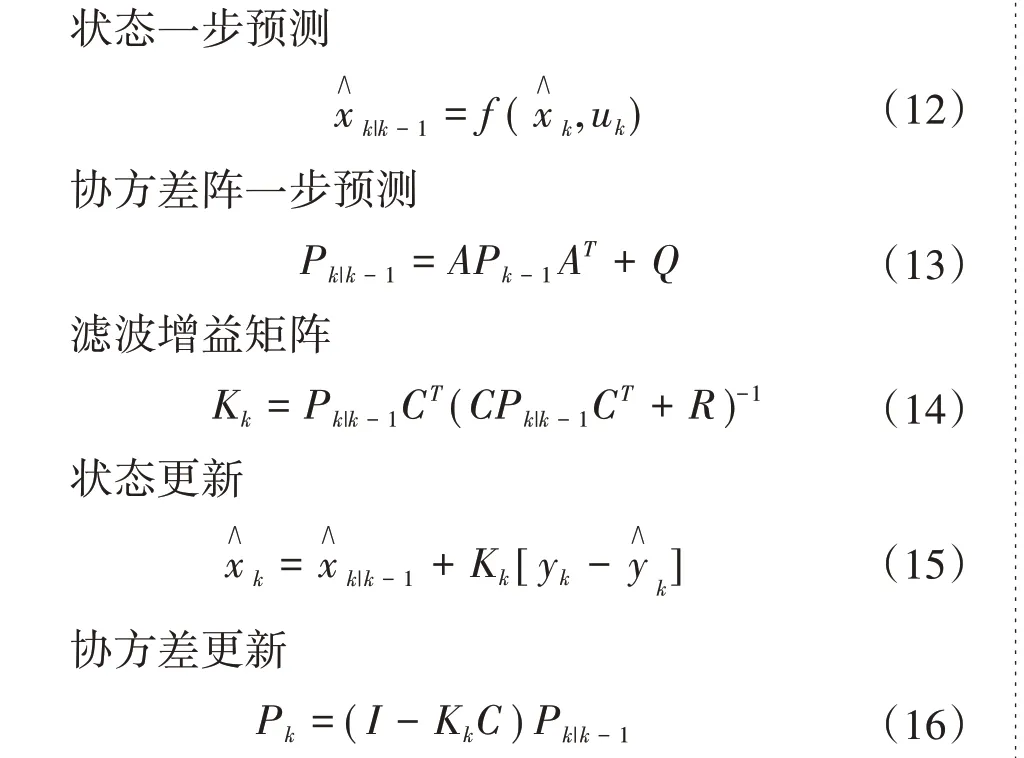
擴展卡爾曼濾波估計方程及預測方程如下:
2.2 無跡卡爾曼濾波器
無 跡 卡 爾 曼 濾 波(Unscented Kalman Filter,UKF)同樣用于非線性系統估計,其基于無跡變換,通過構造1組確定的加權樣本點來對估計參數進行近似。可避免對非線性模型的線性化建模及雅可比矩陣計算。UKF基本算法描述如下:
初始狀態統計特性
式中:W 為均值的權值;W 為協方差的權值。
3 健康因子退化估計
本章對健康因子的多種退化模式進行仿真,限于篇幅僅以多參數漸變、多參數突變為例進行驗證說明,不再贅述單參數漸變、單參數突變這2種參數退化模式。
3.1 多參數漸變估計
對于可測輸出參數,其傳感器標準差約為0.1%~1%,本文假設都為0.2%,因此測量噪聲矩陣R=([0.002,0.002,0.002,0.002])·I,系統噪聲矩陣Q通過試湊法確定,采樣時間為20 ms。無跡卡爾曼濾波參數取值為=0.1 ,=2 ,=0。決定點圍繞均值的分布;用于合并隨機變量分布的先驗知識。
在實際運行中,多個健康因子同時漸變是最常見的退化模式,對此,本文設計了如下的參數漸變模式以驗證參數估計的準確性:4種部件效率退化因子從第10 s起,經30 s后分別漸變至2.0%、2.5%、3.0%和3.5%,之后維持穩定。發動機的真實退化過程遠大于所設定的仿真時間,設置退化時間為30 s,一方面有助于驗證估計的實時精度,另一方面便于仿真模擬。EKF與UKF多參數漸變估計結果分別如圖5、6所示。
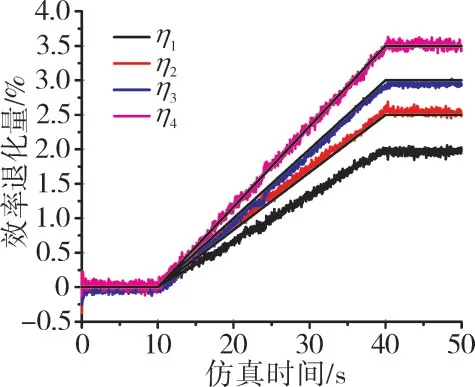
圖5 EKF多參數漸變估計結果
仿真結果表明,對于多參數漸變模式,基于EME模型進行非線性卡爾曼濾波估計結果良好。利用2種非線性卡爾曼濾波器得到的估計結果基本一致。無論是EKF還是UKF,都能極好地跟蹤參數漸變過程,穩態相對誤差絕對值不超過3%。

圖6 UKF多參數漸變估計結果
3.2 多參數突變估計
結合狀態空間模型和標準卡爾曼濾波器進行多參數突變估計時,常由于線性模型近似程度低而使估計結果存在穩態誤差大、退化參數定位不準等問題。本節基于EME模型,設置3種不同退化程度的多參數突變模式(見表1)來進行參數估計仿真,以驗證結合EME模型和非線性卡爾曼濾波器進行參數估計的可靠性。測量噪聲矩陣、系統噪聲矩陣等參數與上文相同。各模式的EKF與UKF估計結果分別如圖7~9所示。
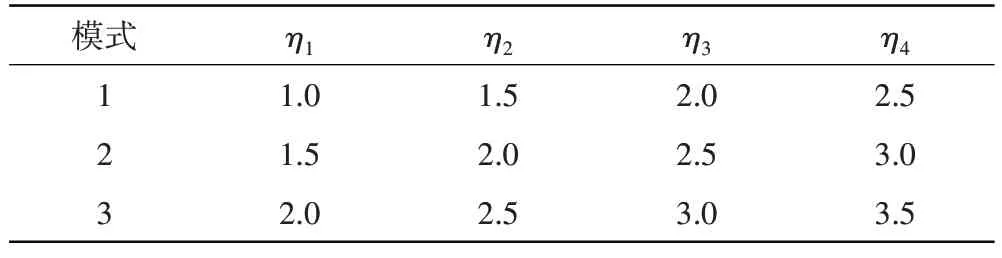
表1 多參數突變退化模式
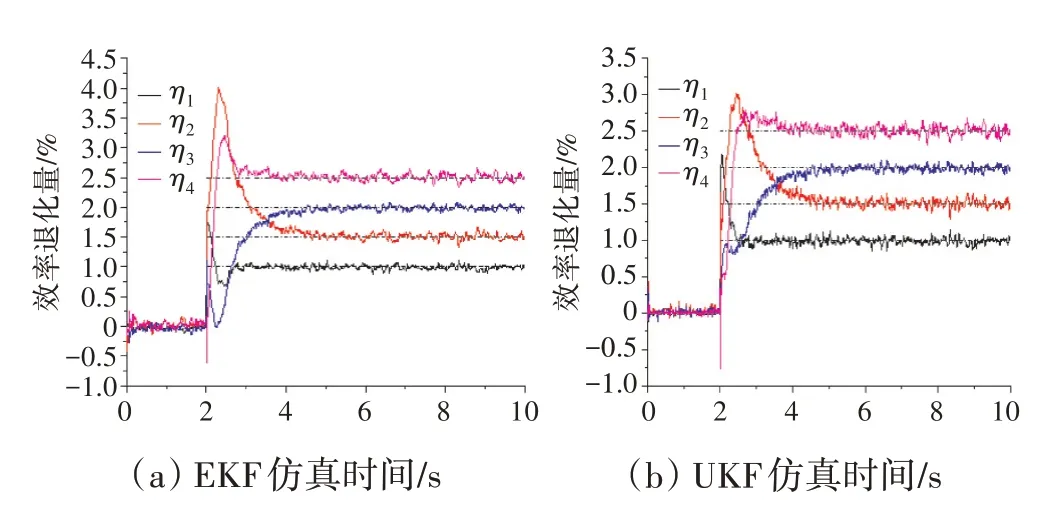
圖7 EKF、UKF參數估計結果(模式1)

圖8 EKF、UKF參數估計結果(模式2)
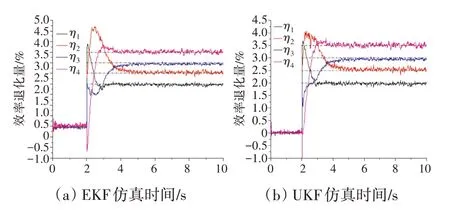
圖9 EKF、UKF參數估計結果(模式3)
從圖7~9中可見,基于EME模型,無論是采用EKF還是UKF都能迅速準確地定位到退化參數,并估計出部件性能退化程度。二者均沒有出現結合線性狀態變量模型和標準卡爾曼濾波估計時所存在的較大穩態誤差,體現出EME模型對原非線性系統良好的近似性。此外EKF與UKF的收斂速度基本一致,均在5 s以內,但UKF的估計參數變化曲線更平穩。考慮到UKF相較于EKF更適用于對強非線性系統進行參數估計,側面佐證了EME模型是原非線性系統的較佳近似模型。可在保證精度的情況下代替部件級模型進行健康參數退化估計。
4 結束語
(1)提出基于平衡流形展開模型結合非線性卡爾曼濾波器的方法進行發動機健康參數估計,驗證了發動機健康參數估計新的模型基礎。
(2)得益于EME模型對原非線性系統良好的近似性,多參數漸變、多參數突變模式參數估計結果準確高效,穩態誤差不超過3%,彌補了線性狀態模型近似性差、部件級模型計算量大等不足。為基于EME模型構建機載自適應模型奠定了方法基礎。
(3)當退化參數較多,并且需建立整個飛行包線內的EME模型時,系數矩陣求解、調度參數擬合等方面工作量大,需進一步探索更為高效的方法。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
汽車與新動力(2015年1期)2015-02-27 12:11:01
電子設計工程(2014年6期)2014-02-27 11:56:54