基于無人機可見光影像的毛竹林郁閉度估測方法
2022-10-12 06:45:04王雨陽王懿祥李明哲
浙江農林大學學報 2022年5期
王雨陽,王懿祥,李明哲,梁 丹
(1. 浙江農林大學 環境與資源學院,浙江 杭州 311300;2. 浙江農林大學 省部共建亞熱帶森林培育國家重點實驗室,浙江 杭州 311300;3. 浙江農林大學 浙江省森林生態系統碳循環與固碳減排重點實驗室,浙江 杭州
311300)
林分郁閉度是指林木樹冠垂直投影面積占林地總面積的比例,是反映林分密度的重要指標,在森林資源調查中尤為重要。在傳統的森林資源調查中,獲取林分郁閉度的主要方法為抬頭望法,該方法耗時耗力,獲取的數據精度較低,且只適用于面積小、地勢緩的林地,難以在地理環境復雜的大區域內應用。隨著數字成像技術的發展,HERBERT[1]提出利用魚眼相機拍攝全天空相片進行郁閉度估測,擴大了拍攝的林冠范圍;濮毅涵等[2]基于普通可見光照片中的樹葉、樹干和天空進行分類,將估測結果與抬頭望法結果進行模型比較,得到決定系數(R2)為0.77,但該方法適用于地形平坦的林區,在地形復雜的山地難以應用。為克服地形因子的限制,不少學者基于衛星遙感影像對喬木林林分郁閉度的提取進行了研究。高云飛等[3]基于SPOT 5影像,對各波段的遙感影像像元亮度值進行組合,建立反演模型,最終得到最佳組合模型的R2為0.66;李擎等[4]為提高模型精度,基于高分二號(GF-2)遙感影像,結合光譜信息、紋理特征和地形因子構建郁閉度估測模型,模型精度達89.82%。然而衛星遙感成本高、時效低、靈活性低[5],相比之下無人機可見光遙感在中小型遙感區域作業中能發揮更大的優勢,滿足動態森林資源監測的條件和需求,并提供更多可能性[6-8]。蘇迪等[9]基于無人機可見光影像,利用主成分分析確定模型的主成分變量,建立郁閉度回歸方程,估算精度為83.18%;汪霖[10]結合無人機可見光影像得到的數字正射影像(DOM)和冠層高度模型(CHM),使用閾值法對樹冠區域進行提取并計算郁閉度,平均精度為92.93%。以上關于喬木林分郁閉度遙感估測的研究都取得了一定的成果,能夠滿足林業調查需求,然而,目前基于無人機可見光影像的毛竹林林分郁閉度估測研究為數不多。
毛竹作為中國南方重要的筍、竹兩用竹種,是最重要的森林資源之一。第九次全國森林清查結果顯示:毛竹林面積為467 hm2,占竹林總面積的73%[11]。由于毛竹林的生長特點(擴鞭)[12-13]和經營特點(擇伐),使得林分郁閉度在毛竹林經營中尤為重要,出筍率和采伐結果都將反映在郁閉度上,只有保持適宜毛竹生長的郁閉度,才能提高毛竹生產力。毛竹林多分布在山地丘陵地區,傳統的實地調查工作量大、效率低、工作周期長、精確度低。隨著無人機技術的發展,無人機林業遙感為實現低成本、高時效、高分辨率、高靈活性的動態森林資源監測提供了技術基礎。基于無人機和圖像識別技術的單木樹冠提取已有一定進展。然而相比其他喬木林,毛竹林竹冠具有特殊性,分為鉤梢與未鉤梢2種形態,且竹冠鮮少呈單個狀態,具有“重疊性”,目前還沒有利用現有方法直接獲取單株毛竹竹冠的研究。本研究對無人機可見光影像的毛竹林郁閉度估測方法進行了分析,以期為快速獲取毛竹林的郁閉度提供參考。
1 研究區概況與研究方法
1.1 研究區概況
研究區位于浙江省湖州市安吉縣(30°23′~30°53′N,119°14′~119°53′E),該區地處長江三角洲腹地,屬于亞熱帶季風氣候,植被類型為亞熱帶常綠闊葉林,年均氣溫為12.2~15.6 ℃,年均降水量為1 100~1 900 mm。研究區內光照充足,雨量充沛,竹資源豐富,竹林總面積達757 km2,占森林面積56.47%,其中毛竹占79.30%,被譽為“中國竹鄉”。
1.2 數據獲取
1.2.1 樣地劃分與地面數據獲取 根據是否鉤梢和郁閉度2個因素選設樣地,共調查36個10 m×10 m的樣地,其中已鉤梢毛竹林樣地24個,未鉤梢毛竹林樣地12個。利用研究區數字正射影像目視解譯獲得毛竹林的郁閉度,未鉤梢樣地為拋荒毛竹林,處于無人經營狀態,郁閉度均大于0.9,故在本研究中不再細分郁閉度等級。樣地基本情況見表1。
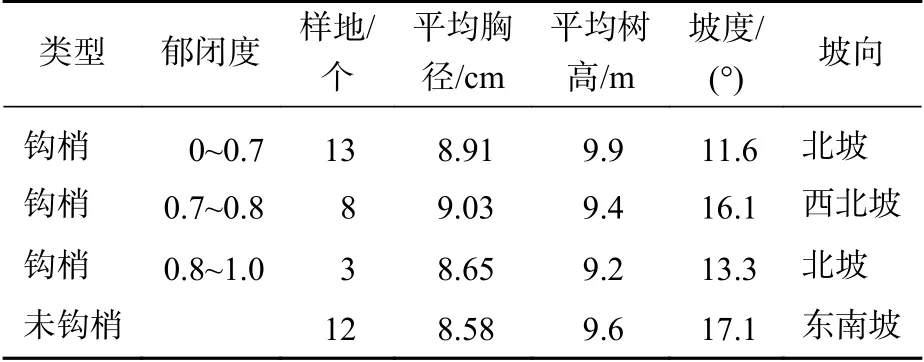
表 1 毛竹林樣地基本情況Table 1 Basic information of plot sites
1.2.2 無人機系統及數據采集 數據采集所用無人機遙感系統為大疆Phantom 4 RTK,飛行系統包括3部分:飛行器、云臺相機和遙控器。飛行器提供多方位視覺系統,可穩定飛行和精準懸停,進行航點飛行作業;機身裝備機載D-RTK,可提供厘米級高精度準確定位,實現更精準的測繪作業。Phantom 4 RTK配備24 mm廣角相機、高精度防抖云臺及圖像傳感器、機械快門,確保成像效果。遙控器的主要功能包括作業設計、遠距離信號傳輸和航拍高清畫面實時監測等。
2020年11月18日14:00—15:00,天氣晴朗、無風、無云,采用大疆Phantom 4 RTK搭載光學相機對選定研究區域進行拍攝。無人機飛行高度為160 m,飛行范圍東西走向為222.82 m,南北走向為106.28 m,航向重疊率為90%,旁向重疊率為80%,飛行路線設計為“S”型路線。拍攝共得原始照片142張,空間分辨率為3.36 cm,照片共3波段:紅波段(R)、綠波段(G)、藍波段(B)。
1.2.3 影像預處理 使用大疆智圖軟件對無人機所獲取照片進行圖像處理,通過三維重建技術,生成帶有空間參考信息的數字表面模型(DSM)和色調自然、無明顯接痕的正射影像圖。圖像處理的主要流程包括:①數據預處理,對照片進行校驗、篩選、對齊,剔除一些無法進行后續合成的照片;②空三加密,通過空三計算得到密集點云和紋理;③生成網格,得到帶空間參考信息的數字表面模型和數字正射影像。
1.3 研究方法
1.3.1 多尺度分割 在毛竹林高分辨率遙感影像中,由于影像信息太多、林間空隙太雜,經常會產生“同物異譜”和“同譜異物”現象,而在分類前執行分割能有效解決該問題[14-16]。
多尺度分割是從任意一像元開始,自下而上進行合并的一種分割手段,其參數設置包括分割尺度、形狀因子和緊致度因子。其中形狀因子的取值為[0,1],它包含了形狀和光譜2個方面的意義,取值越大,表示在同質性標準中形狀因子所占比例越高,光譜因子所占比例就越低,反之亦然。緊致度因子包含緊致度和光滑度,兩者權重之和也為“1”。分割尺度作為各參數中最重要的一項,決定了分割所得的多邊形對象內部的異質性,分割尺度越大,所生成的對象面積就越大,數目就越少,反之亦然[17]。本研究采用eCognition軟件中的Estimation of Scale Paramater 2(ESP2)插件來確定分割尺度,通過設置一系列的參數進行迭代,計算局部方差以及局部方差變化率(ROC)[18-19],ROC=[VL-(VL-1)]/(VL-1)×100。其中:VL表示尺度為L時分割結果中所有對象局部方差值的方差;VL-1表示尺度為L-1時分割結果中所有對象局部方差值的方差。
本研究對不同類型的毛竹林進行不同參數組合實驗,得到不同毛竹林的最優參數組合(表2)。
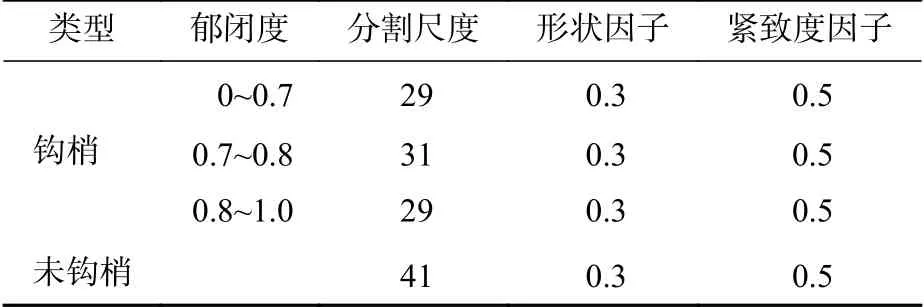
表 2 不同毛竹林的最優參數組合Table 2 Optimal parameter combination of different Moso bamboo stands
1.3.2 分類 ①基于像元的閾值分類(TP)。通過設定不同的特征閾值,將圖像分為若干類。常用的特征值包括2類:直接來自于原始圖像的灰度或彩色特征和由原始灰度或彩色值變換得到的特征值。基于無人機影像的毛竹林竹冠區域閾值分類的關鍵在于選取能有效區分竹冠與非竹冠的最優閾值。通過選取竹冠與非竹冠的樣點,得到各樣點的閾值,統計不同閾值所包含的像元數目,繪成具有明顯峰值與谷值的曲線圖[20-21]。2個峰值對應位置分別為竹冠與非竹冠的典型特征值,谷值為竹冠與非竹冠交界處對應的特征值,也就是最優閾值(圖1)。
特征值的選取對提取精度至關重要,本研究使用ENVI軟件對數字正射影像中的紅、綠、藍波段進行主成分分析,得到紅光和綠光波段包含98%以上的信息量,故選取由紅、綠波段變換得到的歸一化綠紅差異指數(INGRD)為特征值[22-23],在MATLAB中對竹冠區域進行提取,表達式為INGRD=(G-R)/(G+R)。其中R為紅光波段,G為綠光波段。②基于像元的監督分類(SP)。根據已知訓練區提供的樣本,選取并求出特征參數作為決策規則,建立判別函數對各類圖像進行分類的一種方法。本研究建立竹冠區與非竹冠區2種樣本,并在ENVI軟件中選擇最大似然法作為分類算法進行竹冠區域提取,該方法根據訓練樣本的均值和方差,評價待分類像元和訓練樣本之間的相似性進而分類,可同時考慮2個以上的波段和類別。③基于多尺度分割的閾值分類(TM)。與傳統基于像元的分類不同,基于多尺度分割的閾值分類是一種面向對象分類,其分類的基本單元為影像對象,基本內容分為影像分割與影像分類2個獨立模塊。結合了多尺度分割的分類方法,在精確分類的同時,很好地兼顧了地物的宏觀尺度和微觀特征,極大地消除了傳統分類帶來的“椒鹽效應”。在分割的基礎上,本研究使用INGRD對竹冠區域進行閾值提取。④基于多尺度分割的監督分類(SM)。該分類也是在多尺度分割的基礎上,基于對象進行監督分類。本研究通過eCognition軟件進行多尺度分割,并選擇最鄰近值分類法進行分類提取,該方法通過均勻地選擇樣本,建立訓練集,統計樣本的特征信息,通過計算未分類對象與樣本之間的距離進行分類,并提取竹冠區域。
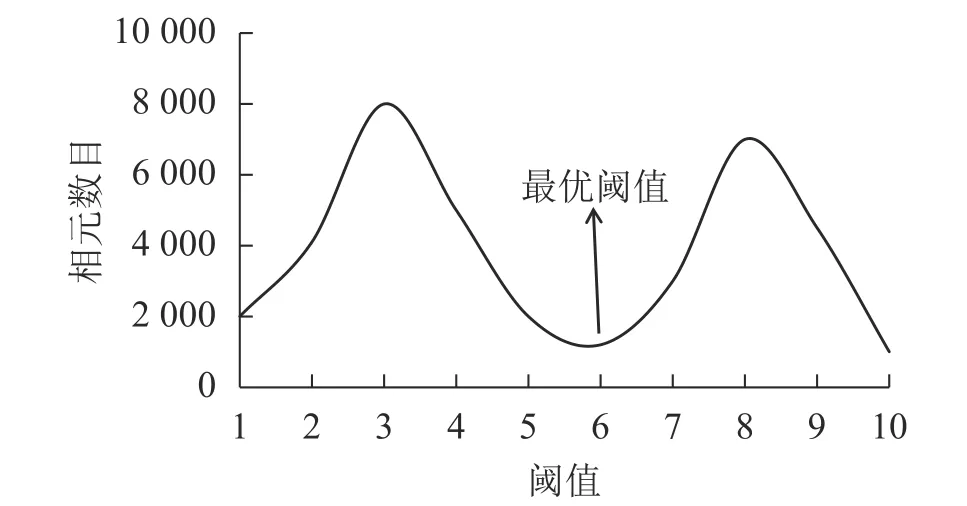
圖 1 雙峰法最優閾值示意圖Figure 1 Schematic diagram of the double peak threshold method
1.3.3 郁閉度計算 郁閉度是指樹冠的總垂直投影面積(m2)與該樣方的總面積(m2)之比,反映林分的密度和林分光能利用程度,是撫育間伐的重要指標,郁閉度=總冠幅/樣方總面積。
1.3.4 精度評價 在無人機影像的基礎上,根據竹冠部分的亮度、紋理和陰影等特征,在ArcGIS軟件中對各個小樣地進行目視解譯,并以目視解譯的結果作為真值對4種方法進行精度評價[24]。分別用正確識別的竹冠總面積(AC,m2)、真實的竹冠總面積(AR,m2)、識別的竹冠面積(AD,m2)、正確識別的非竹冠面積(AN,m2)、樣地面積(AS,m2)、真實郁閉度(RD)、分類結果得到的郁閉度(DC)等7個指標進行精度和誤差的計算。總體精度(OA)=(AC+AN)/AS×100%;用戶精度(UA)=AC/AD×100%;生產者精度(PA)=AC/AR×100%;郁閉度誤差(DE)=|RD-DC|。
1.3.5 單因素方差分析 使用SPSS 25.0對各樣地的總體精度、用戶精度、生產者精度、郁閉度誤差進行統計分析,采用單因素方差分析法(one-way ANOVA)進行顯著性檢驗,采用LSD法進行多重比較分析(P=0.05),文中數據為平均值±標準差。
2 結果與分析
2.1 毛竹林竹冠區域提取
從圖2可見:無論是在鉤梢毛竹林還是未鉤梢毛竹林中,基于像元的閾值分類法的結果存在較多錯分和漏分的情況,且提取結果存在“碎片化”情況。基于像元的監督分類法的漏分情況較少,但存在較多的錯分且提取結果呈“碎片化”;基于多尺度分割的閾值分類法提取的樹冠存在較嚴重的錯分和漏分情況;基于多尺度分割的監督分類法基本解決了樹冠提取結果“碎片化”的問題,提高了所提取樹冠的整體性,減少了錯分和漏分的情況。從表3可以看出:基于多尺度分割的監督分類法的總體精度、生產者精度和用戶精度都顯著高于其他3種方法(P<0.05);基于多尺度分割的監督分類法郁閉度誤差最小,為0.004,顯著低于其他3種方法(P<0.05),表明使用基于多尺度分割的監督分類法提取毛竹林郁閉度的結果明顯優于其他3種方法。
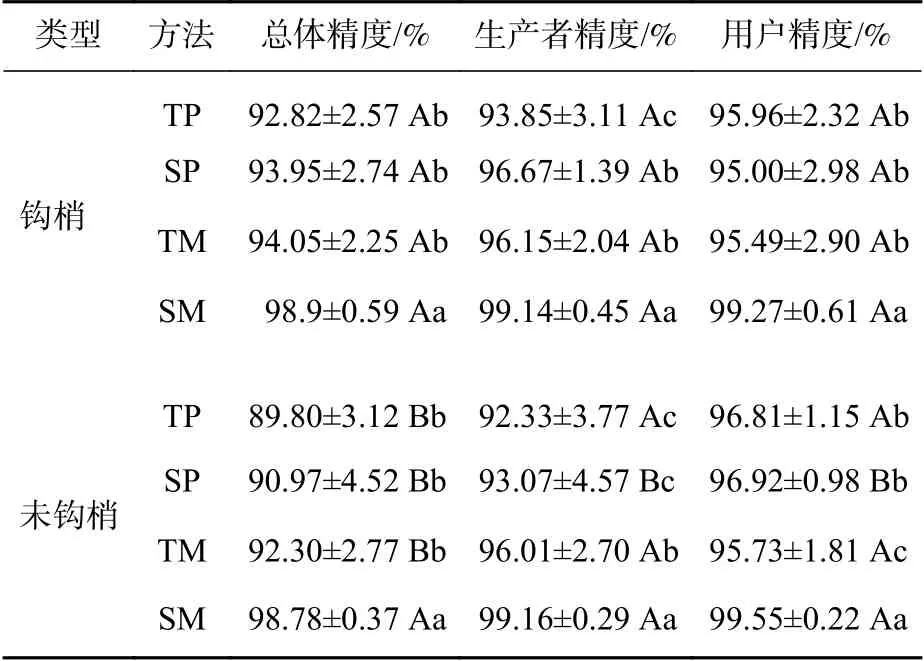
表 4 4種方法下鉤梢和未鉤梢毛竹林竹冠區域的提取精度Table 4 Extraction accuracy of the four methods with truncation and non-truncation

圖 2 不同方法提取竹冠效果對比示意圖Figure 2 Comparison of the bamboo crown extraction results with different methods

表 3 不同方法的毛竹林竹冠提取精度及郁閉度誤差對比Table 3 Bamboo crown extraction accuracy and canopy density error of different methods
2.2 鉤梢與未鉤梢對毛竹林竹冠區域和郁閉度提取精度的影響
如表4所示:在基于多尺度分割的監督分類法中,是否鉤梢對總體精度均沒有顯著影響,說明基于多尺度分割的監督分類法對鉤梢和未鉤梢毛竹林均適用;在其他3種方法中,鉤梢毛竹林總體精度顯著高于未鉤梢毛竹林,說明這3種方法更適用于鉤梢毛竹林。無論是鉤梢林分,還是未鉤梢林分,基于多尺度分割的監督分類法的總體精度均顯著高于其他3種方法(P<0.05)。
從表5可見:基于多尺度分割的監督分類法所得到的郁閉度誤差最小,在鉤梢林分中僅為0.003,在未鉤梢林分中僅為0.004,顯著低于其他3種方法(P<0.05)。在基于多尺度分割的監督分類法和基于多尺度分割的閾值分類法中,是否鉤梢對郁閉度誤差沒有顯著影響;在基于像元的監督分類法和基于像元的閾值分類法中,鉤梢毛竹林的郁閉度誤差顯著低于未鉤梢毛竹林(P<0.05)。
2.3 郁閉度對毛竹林竹冠區域提取精度的影響
從表6可見:4種方法對不同郁閉度毛竹林的總體精度均沒有顯著影響,說明這4種方法在不同郁閉度的毛竹林中均適用。

表 5 4種方法下鉤梢和未鉤梢毛竹林的郁閉度誤差Table 5 Canopy density error of the four methods with truncation and non-truncation
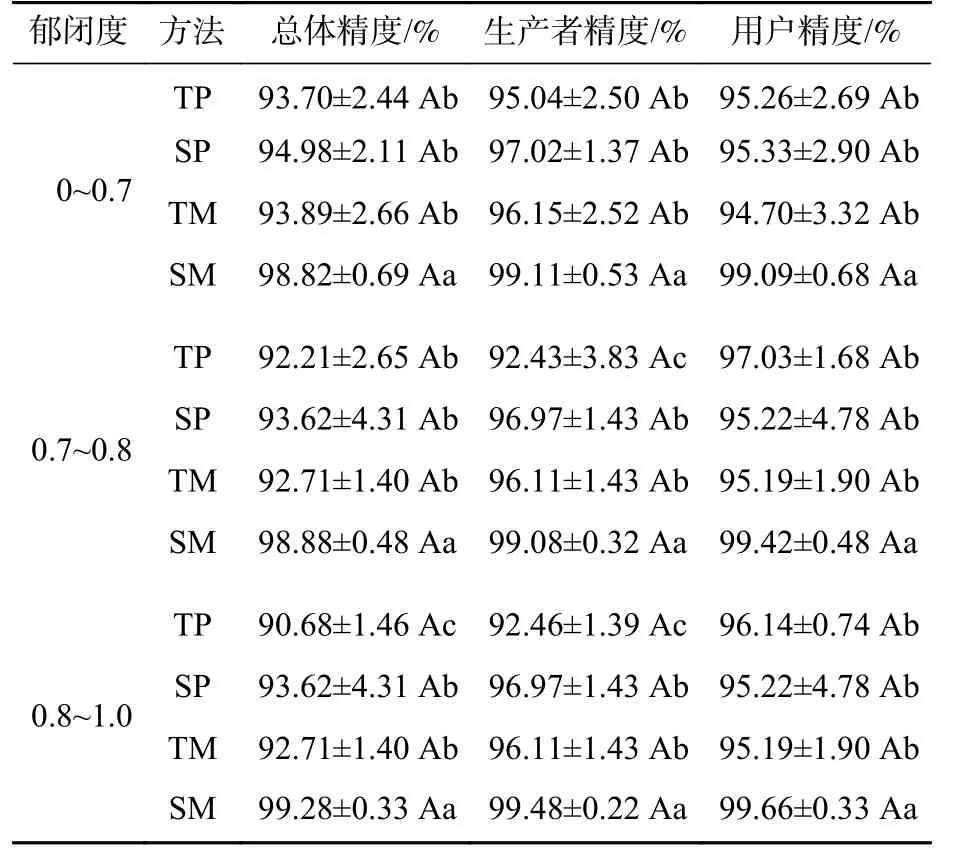
表 6 不同方法下郁閉度對毛竹林竹冠提取精度的影響Table 6 Effect of canopy density on the extraction accuracy under different methods
3 討論
本研究4種方法提取的毛竹林竹冠區域精度均在90%以上,而汪霖等[25]通過提取單個樹冠面積,得到提取樹冠區域的總體精度為93.09%,高于本研究基于像元的閾值分類法和基于像元的監督分類法,但低于基于多尺度分割的閾值分類法和基于多尺度分割的監督分類法,證明在分類前執行分割能有效提高提取精度。4種方法在竹冠區域提取精度上,基于像元的提取精度小于基于多尺度的提取精度。可能是相比于喬木林,毛竹林由于其擴鞭生長的特殊性,竹冠部分難以單個呈現,具有很強的整體性,使用傳統基于像元的提取方法難以達到對整體性的要求。基于多尺度分割的監督分類法表現最好的原因是在保證對象內部同質性最大的基礎上進行的分類,且結合了光譜、紋理等信息進行分類,分類依據更全面;而相較于基于多尺度分割的監督分類法,基于多尺度分割的閾值分類法由于分類規則只基于光譜信息,較為單一,故精度較低。
在基于像元的閾值分類法、基于像元的監督分類法和基于多尺度分割的閾值分類法中,是否鉤梢對竹冠區域提取的影響存在較大影響。其一是由于未鉤梢毛竹林郁閉度過高,林隙較小且顏色與竹冠接近,導致光學影像的飽和度增高,對特征量的敏感度隨之下降,造成誤差[26-27];其二是由于未鉤梢毛竹林一般處于無人經營狀態,存在毛竹倒伏現象和新老竹之間的光譜差異,造成誤差。但是,基于多尺度分割的監督分類法則不受毛竹林是否鉤梢的影響,其原因是多尺度分割得到內部同質性最大、外部同質性最小的斑塊,很好保留了分類必需的有效信息,且避免了高分辨率影像中過于豐富的光譜與紋理信息所帶來的干擾,減少錯分與漏分的情況,基于此進行的監督分類能在保證竹冠整體性的前提下,通過訓練樣本分別提取鉤梢與未鉤梢毛竹林的特征參數,從而提取毛竹林竹冠區域。
在4種方法中郁閉度對竹冠區域的提取均不存在顯著影響,說明4種方法對不同郁閉度的毛竹林竹冠提取都有較好的適用性。原因是不同郁閉度的毛竹林遙感影像的光譜與紋理特征差別不大,這4種方法都足以從影像中提取穩定的特征量對竹冠區域進行提取。
就郁閉度估測結果而言,4種方法提取的郁閉度誤差都小于0.04,其中基于多尺度分割的監督分類法的誤差最低,郁閉度誤差僅為0.004,說明基于無人機的可見光影像可以用于毛竹林的郁閉度提取,具有很高的應用價值。蘇迪等[9]基于冠層高度模型數據進行主成分確定自變量建立郁閉度模型,通過檢驗得到模型精度為83.18%,低于本研究的估測精度,說明基于影像提取的郁閉度優于建模所得的郁閉度。嚴羽[28]使用標記控制分水嶺算法對樹冠區域與非樹冠區域進行分割,基于分割得到的樹冠區域面積與實測面積對比,得到郁閉度估測誤差為2.33%,高于本研究基于像元的閾值分類法、基于像元的監督分類法和基于多尺度分割的閾值分類法,但低于基于多尺度分割的監督分類法。
4 結論
在提取毛竹林竹冠區域和郁閉度的中,本研究基于像元的閾值分類、基于像元的監督分類、基于多尺度分割的閾值分類、基于多尺度分割的監督分類等4種方法都達到了較高精度,其中基于多尺度分割的監督分類法的提取結果精度最高,竹冠區域總體精度為98.86%,郁閉度誤差為0.004,顯著優于其他3種方法,而且是否鉤梢對于基于多尺度分割的監督分類法提取竹冠區域沒有影響。在4種方法中,郁閉度對竹冠區域的提取均不存在顯著影響。總體上,低廉輕便的無人機搭載可見光相機節省了大量的調查時間與精力,提高了調查效率與精度,可以用于大面積毛竹林竹冠區域和郁閉度的提取。
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
人大建設(2020年4期)2020-09-21 03:39:12
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
人大建設(2017年2期)2017-07-21 10:59:25
人大建設(2017年9期)2017-02-03 02:53:31
少兒科學周刊·少年版(2015年3期)2015-07-07 21:00:00
浙江人大(2014年5期)2014-03-20 16:20:28