靜脈識別系統成像三維優化設計*
2022-10-11 12:33:40羅小燕
傳感器與微系統 2022年10期
關鍵詞:優化
羅小燕, 謝 云
(1.江西理工大學 機電工程學院,江西 贛州 341000; 2.江西省礦冶機電工程研究中心,江西 贛州 341000)
0 引 言
手背靜脈識別技術是一種新興的生物識別技術,具有安全性能高、穩定性好以及非接觸式識別等優點[1]。手背靜脈識別實現的第一步即為采集靜脈圖像,采集工作需要在850 nm的光照環境下進行,所采集靜脈圖像的品質直接影響識別的準確率。在實際應用中,由于單個近紅外發光二極管(LED)的照度不均勻,LED排列不規范,布局不合理,導致LED光源光照不均勻,采集的靜脈圖像存在曝光度不均勻、特征信息顯示不充分等問題,不僅增大了后期圖像處理的工作難度,還減少了所采集圖像中包含的靜脈特征,導致識別系統的識別效率及準確率降低。針對上述問題,需要對LED陣列進行優化,設計一種光照均勻度高的光源。
近年來,為提高適當距離處光源的均勻照度場,光源的二次光學設計得到相關研究人員的廣泛關注,并取得不錯的成就[2,3]。吳飛等人[4]建立光學模型,通過斯派羅法則>對LED的距離進行優化,確定最優距離,構建三角形光源陣列。王加文等人[5]構建均勻度評價函數,采用模擬退火算法對圓形以及4×4和5×5的矩形LED陣列進行優化,分別得到97 %,96 %和95 %的光照均勻度。何果等人[6]采用果蠅優化算法,分別對矩形和圓形LED陣列的三維坐標參數進行優化,通過TracePro進行仿真驗證,分別得到97.4 %和96.0 %的光照均勻度。Wang J等人[7]建立環形光源的照度計算模型,從理論模型出發,得到檢測平面與LED平面距離與照度均勻度之間的數學關系,并求出最優解,得到最佳均勻照度場。
本文建立光源照度模型,采用菌群算法針對LED陣列的坐標參數進行三維空間優化,得到最佳位置參數,最后通過TracePro光學軟件進行仿真,并進行實驗,將LED按優化所得位置排列,獲取優化光源后的手背靜脈圖像。
1 靜脈識別系統中存在的照明問題
靜脈識別系統中,手背上光源分布的均勻性顯得尤為重要。系統中采用的由多個LED組成的近紅外光源在接收平面內產生的照度不均勻。導致采集的靜脈圖像出現下列兩種缺陷:1)接收平面的豎直方向上光照不均勻,容易出現部分位置曝光過度,導致獲取的靜脈圖像出現靜脈顯示不清晰的情況。如圖1(a)所示,在豎直方向上,光照強度強的上半部分靜脈未能顯示。 2)在接收平面的橫向方向上光照效果不均勻,容易出現陰影。如圖1(b)所示靜脈圖像。在傳統LED光源陣列的照射下,由于接收平面右半部分較左邊部分光照弱,導致靜脈圖像右半邊出現陰影,該部分的靜脈未能展現,靜脈的整體特征未能體現。

圖1 不均勻光照下的靜脈圖像
后續的靜脈識別過程中,靜脈特征不能完全提取,容易出現識別錯誤,導致識別率降低。嚴重降低靜脈識別系統的魯棒性。通過建立光照模型建模,并進行優化,獲取最佳三維坐標參數。
2 模型建立
2.1 光學模型
針對單顆LED燈珠,將其近似為一個點光源,光線以燈珠芯片為中心,向四周均勻發散,理想的LED點光源的輻射照度滿足余弦函數[8]
E(r,θ)=E0(r)cosmθ
(1)
式中θ為光線與光軸之間的夾角;E(r,θ)為光軸輻照度;m為光源輻射模式,由半功率角θ1/2處的光強決定(該參數由生產工藝決定)。m值與半角θ1/2的關系可由下式確定
(2)
對單個LED燈珠進行分析,將其放置于三維空間點A(X,Y,Z)處, 則在點B(x,y,z)處接收到由該LED燈珠產生的光強為
(3)
在三維空間中將n個LED燈珠進行排列,燈珠的位置參數設定為(Xi,Yi,Zi),考慮到由n個LED燈珠組成的光源是一種非相關光源,空間內某一點的照度為各燈珠在改點照度的線性疊加[9]。則在點B(x,y,z)處由n個LED燈珠產生的總光強為
E(xi,yi,zi)=
(4)
將接收平面近似均勻地分為n份,則平面上每份的平均光照強度為
(5)
為衡量某一平面上光照均勻度,定義光源的照度均勻度μ,μ為光源接收平面上各點照度的平均值與最大值之比
(6)
構建評價函數F對LED的位置參數進行優化,令
(7)
由式(7)可看出,評價函數的自變量為LED燈珠的位置參數,通過優化算法尋找某一特定坐標,使評價函數取得最小值,使靜脈所接收的光照均勻度達到最高。針對評價函數的最小值尋找問題,常采用全局優化算法實現,如遺傳算法、果蠅算法、模擬退火算法等[10~13]。本文擬采用菌群算法對LED光源的三維坐標參數進行優化。
2.2 優化算法模型
為實現LED陣列位置參數的三維優化,本文采用菌群優化算法進行優化。對LED位置參數尋優過程中,通過模擬菌群的趨向機制、聚群機制、繁殖機制以及遷徙機制[14,15],使代表LED的菌群在某一限制范圍內不斷搜索,向最優位置移動。其中,將LED位置參數(xi,yi,zi)設定為菌群的具體位置,以評價函數F作為優化指標。
優化過程中,第i個LED沿某個方向移動一步所產生的解可以表示為
(8)
采用菌群算法對LED陣列位置參數優化的具體步驟如下:
步驟1 初始化操作。將各LED燈珠看作單個細菌,據實際成像距離及面積確定其位置參數的上下限xmin,xmax,ymin,ymax,zmin,zmax。對LED的位置參數進行初始化方法如下
xi(0)=R(xmax-xmin)+xmin
(9)
yi(0)=R(ymax-ymin)+ymin
(10)
zi(0)=R(zmax-zmin)+zmin
(11)
式中xi(0),yi(0),zi(0)為LED的三維初始坐標,R為[0,1]之間的隨機數,種群規模為s,i=1,2,…,s。
步驟2 趨向性操作。每個細菌進行一次趨向性位移后,計算新位置的評價函數,并與上一個位置的評價函數進行比較,若評價函數較上一位置小,則更新位置參數;反之,則位置參數保持不變,記錄新位置Ji(j,k,l)。
步驟3 繁殖操作。分別計算S個細菌在優化過程中各位置的評價函數值總和評價函數總和越大,方差越大,則細菌健康度越低,反之則越高。根據健康度對細菌順序排列,淘汰后sr=s/2個相對不健康的細菌。
步驟4 遷徙操作。每個細菌i=1,2,…,s以一定概率遷徙到達新位置。
步驟5 根據方差值是否為最小以判定尋優是否接受。若結束,則返回最優解(xi,yi,zi);反之,返回至步驟2繼續尋優。
位置參數優化流程如圖2所示,流程圖中Ned,Nre,Nc分別表示遷徙、繁殖和趨向性的執行次數。
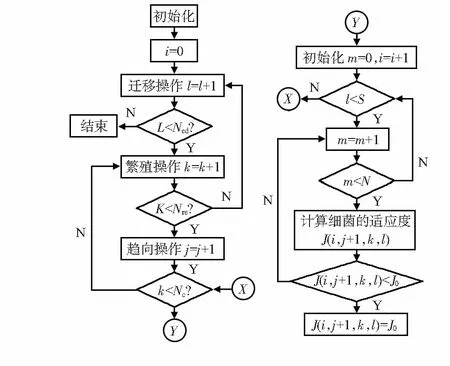
圖2 菌群算法優化程序結構
3 仿真與實驗分析
本文實驗選用的LED芯片尺寸為5 mm×5 mm×0.1 mm,波長為850 nm,每個芯片的軸線方向的光照強度為2 800 mcd,發光面出射光纖數為100 000條。據實際操作情況,在距離光源40 mm處放置一塊半徑為30 mm的接收板,模擬手背靜脈光源接收面。本實驗分別設計矩形和圓形LED陣列,對位置參數進行三維優化,并進行Tracepro仿真和實驗。
3.1 圓形LED陣列優化結果
設計一組由8個LED芯片組成的圓形LED陣列,半徑設置為20 mm,初始LED芯片位置坐標如表1所示。
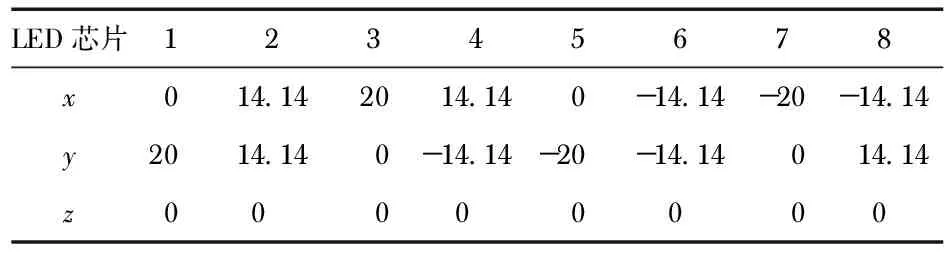
表1 圓形三維LED陣列初始坐標參數
圓形LED陣列的光照強度為
E(x,y,z)=
(12)
式中N=8為LED芯片個數,n為第n顆LED,圓形LED陣列的初始半徑設置為20 mm。
初始狀態下,通過Tracepro光學仿真軟件對光源照度進行分析,得到圓形LED陣列在接收平面的照度分布如圖3所示 ,照度均勻度為75.6 %。

圖3 未經優化的圓形陣列照度分布
采用菌群算法對光源位置參數進行優化,將光照強度式(5)代入評價函數,尋找評價函數的最小值,經優化后,得到LED陣列中各燈珠新的位置參數見表2所示。
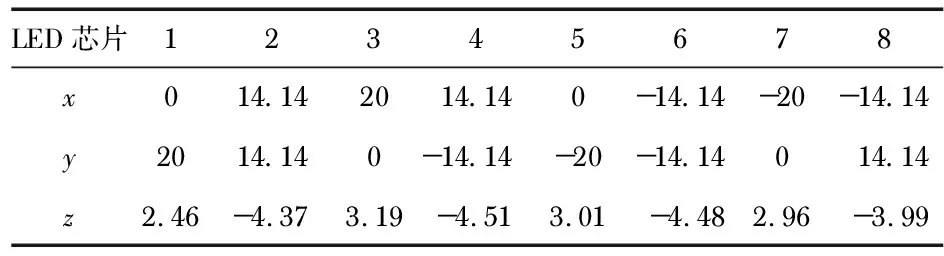
表2 圓形三維LED陣列優化坐標參數
采用光學軟件對優化結果進行仿真測試,測試結果顯示,經三維優化后的圓形LED陣列在接收平面內的照度均勻度為88.58 %,相較于未優化的LED陣列,照度均勻度提高了12.98 %,照度分布如圖4所示。

圖4 優化后的圓形LED陣列照度分布
3.2 矩形LED陣列優化結果
將9只LED按矩形排列,相鄰LED之間的二維距離相等,設定為20 mm,優化過程對LED的的三維坐標進行優化,矩形LED芯片初始位置坐標如表3所示。其光照強度為
(13)
式中N=9,為LED芯片個數,n為第n顆LED。

表3 矩形三維LED初始坐標參數
在初始狀態下,通過Tracepro光學仿真軟件對光源照度進行分析,得到矩形LED陣列在接收平面的照度分布如圖5所示 ,照度均勻度為79.4 %。
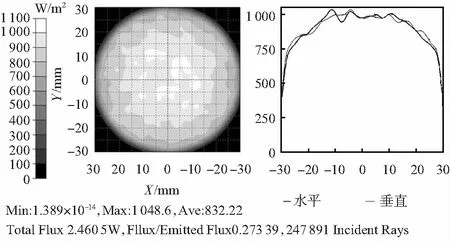
圖5 未經優化的矩形LED陣列照度分布
采用菌群算法對光源位置參數進行三維優化,將光照強度式(5)代入評價函數,尋找評價函數的最小值,經優化后,得到LED陣列中各燈珠新的位置參數見表4所示。
采用光學軟件對優化結果進行仿真測試,仿真結果如圖6所示,測試結果顯示,經三維優化后的矩形LED陣列在接收平面內的照度均勻度為95.8 %,相較于未優化的LED陣列,照度均勻度提高了16.4 %。

表4 矩形三維LED陣列優化坐標參數

圖6 優化后的矩形陣列下靜脈成像
圖7(a)為在優化光源下獲取的手背靜脈圖像,相較于未優化光源下采集的靜脈圖像,圖像的陰影部分明顯減少,靜脈信息與干擾信息之間的區分度極大提高。圖7(b)為在優化光源下獲取的手背靜脈圖像,相較于未優化光源下采集的靜脈圖像,圖像曝光相對均勻,靜脈顯示較為清晰。

圖7 優化后的靜脈成像
4 結 論
本文針對靜脈圖像采集系統中光源照度均勻度較差的問題,分別以圓形LED陣列和矩形LED陣列為研究對象。基于單個LED芯片,對LED光源進行建模,結合菌群優化算法,對兩種LED陣列進行三維優化,獲取照度均勻度最佳時的LED芯片三維坐標參數。通過Tracepro光學仿真軟件對MATLAB的優化結果進行驗證,并進行實驗。實驗結果表明:三維優化后,圓形LED陣列的照度均勻度為88.58 %,較優化前提高了12.98 %;矩形LED陣列照度均勻度為95.8 %,較優化前提高了16.4 %。獲取的靜脈圖像品質得到極大提高,有效改善優化前靜脈圖像存在的曝光過度和陰影問題。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
