無人機航空攝影測量影像數據快速處理技術分析
2022-10-08 11:00:12王麗
數字通信世界 2022年9期
王 麗
(山西華澳商貿職業學院,山西 晉中 030600)
無人機航空攝影技術是航空攝影領域中的一項重要手段,具有靈活快速、成本低廉、實時數據傳輸等方面的獨特優勢,現已成為應用較為廣泛的空間數據獲取手段,特別在應急數據獲取和小范圍測繪等方面存在獨特優勢。現階段無人機航空攝影影像數據分析步驟是:首先進行影響配準,其次進行空三計算、平差處理和幾何校準處理等一系列處理,最后進行影像鑲嵌與正射校正處理。該處理方法存在對原始數據要求高、姿態參數精度要求高和控制點數據要求高的特點。在無人機軟件系統的具體應用中,由于無人機對于地面影像獲取可能會受到內部與外界的各種因素影響,因此其處理質量可能會存在某些問題。為避免此類情況的產生,在數據接收與采用處理軟件進行影像數據處理前,研究人員需通過圖像增強、圖像校正等技術進行預處理,以此來確保測量效果[1]。Agisoft Photo Scan軟件為無人機航空攝影影像數據的快速處理提供了可能。采用Agisoft Photo Scan軟件可對數據進行自動快速拼接處理、生成數字正射影像處理和生成數字高程模型處理。本文將對無人機航空攝影測量系統概述和特點,以及影像數據快速處理技術進行分析探討。
1 無人機航空攝影測量系統概述
1.1 硬件系統組成
無人機航空攝影測量硬件系統主要由兩部分組成,分別為機載系統和地面監控系統,詳見表1。

表1 無人機航空攝影測量硬件系統組成及主要功能
1.2 軟件系統組成
無人機航空攝影測量軟件系統主要由兩部分組成,分比為航線設計軟件和數據接收與處理軟件,詳見表2。
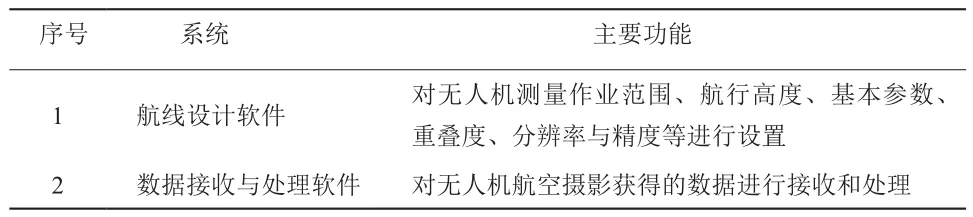
表2 無人機航空攝影測量軟件系統組成及主要功能
2 無人機航空攝影測量技術主要優勢
2.1 時效性強
相較于傳統的人工測量以及衛星測繪技術,無人機航空攝影測量技術在測量中用時更短,可及時提供相應的地理信息。同時,無人機航空攝影測量技術也具有更大的測量范圍,單臺無人機每天可以對數十到數百平方千米的面積進行航空攝影。由此可見,無人機航空攝影測量技術的時效性很強。
2.2 簡單可靠
無人機航空攝影為低空飛行,氣候環境并不會對其產生過大影響,且該技術對于操作場地沒有過高要求,只需確保起降場地平整即可。同時,無人機操作簡單,相關操作技巧容易掌握。由此可見,無人機航空攝影測量技術具備簡單可靠的優勢。
2.3 數據獲取快
通常情況下,無人機上均安裝數碼攝像機等的設備,可實現待測區域地理信息的快速獲取,且具有較高的分辨率。同時,相應的可視化三維地理信息數據也將快速生成,從而有效滿足實際工程測量需求[2]。
2.4 成本低
目前許多無人機航空攝影系統本身價格較為合理,應用和維修較為簡單,加之操作人員有限,不需花費大量的人力資源成本。
3 無人機航空攝影測量影像數據快速處理技術
由目前的無人機航空攝影測量技術應用可知,其影像數據的快速處理主要通過Agisoft Photo Scan軟件來實現。Agisoft Photo Scan軟件中含有自動化三維場景建模技術,通過此項技術,可實現對無人機航空攝影影像數據的良好拼接,同時也可以對EDM模型以及數字化正射影像等三維模型進行建立,從而實現無人機航空攝影作業效率及其影像數據處理效率的顯著提升。Agisoft Photo Scan軟件可以為多種相機獲取的影像數據處理提供支持,包括球面鏡頭、魚眼鏡頭、單幅相機等,且能夠為Python語言提供支持,并以腳本的形式實現自動化作業流程的良好控制[3]。在通過該軟件進行無人機航空攝影影像數據的快速處理中,其主要處理流程包括無人機航拍數據準備、導入并對齊影像、生成密集點云、幾何圖元編輯、生成DEM、生成數字化正射影像以及成果導出七大部分,其主要流程示意圖詳見圖1。

圖1 Agisoft PhotoScan軟件對無人機航空攝影影像數據快速處理的主要流程示意圖
3.1 數據準備
無人機種類繁多和用途各有不同,不同無人機獲取到的POS數據會產生不同的格式,基于此,在通過Agisoft Photo Scan軟件進行無人機航空攝影影像數據的快速處理中,首先需要將POS數據轉換為Photo Scan軟件認可的格式。通常情況下,在無人機航空攝影影像獲取中,其自身攜帶的IMU與GPS將會構成一個POS系統,從而在飛行中實現飛行姿態和WGS-84坐標等的數據獲取,一些無人機航空攝影影像數據將會在拍攝時直接寫入到GPS數據中。通過Photo Scan軟件,可直接在照片EXIF信息中對其位置信息進行讀取。由于無人機飛行姿態數據并非必要數據,不需在影像POS數據中將其導入。
3.2 影像導入與對齊
將無人機航空攝影影像添加到Photo Scan中,若航空攝影區域具有較大的面積,則需要分區處理,各個區域內的航空攝影照片不需要太多數量,便可實現計算機性能的充分利用,并實現航空攝影影像處理效率的進一步提升。若位置信息已經寫入了航空攝影影像數據內,則不需要將影像POS數據導入,否則需導入。在照片導入之后,可對影像進行設置,包括相機精度、標尺精度、標記精度、坐標參考系等。之后是照片對齊處理,對齊精度可以按照五個級別進行劃分,越低精度的照片,對其處理的速度也就越快。通過該軟件中的三維多視圖重建技術,便可對照片的姿態、位置等進行自動計算,并在此過程中實現影像的絕對定向、相對定向以及內定向處理。
3.3 密集點云生成
在具體處理中,Photo Scan軟件可以相機位置作為依據,對其深度信息進行計算,并將其合并成單一形式的密集點云。密集點云的生成質量也可以按照五個等級進行劃分,越高質量的密集點云處理速度就會越慢。在具體處理中,可根據實際需求來合理選擇點云質量。比如,在進行災害區域的應急航空攝影過程中,便可將點云質量適當降低,以此來提升其處理速度。對于部分點云數據,也可以按照實際需求對其進行剪裁或刪除處理。若最終獲得的模型結果需要一個三維多邊形,則需要進一步做好網格構建,可借助于軟件中的稽核員編輯功能;若最終獲得的結果只需要是DEM以及正射影像形式,則不需構建網格[4]。
3.4 幾何圖元編輯
在網格生成之后,可借助于軟件中的幾何圖元編輯功能將不需要的一些面元素刪除。若無人機航空攝影獲取的原始影像數據不具備足夠的重疊度,網格模型可能會出現孔洞。對于孔洞,可通過Photo Scan將其關閉。對于獲得的多邊形模型,也需通過Photo Scan軟件來生成相應的紋理。
3.5 DEM生成
DEM是以網格模型或密集點云為基礎所生成的數字化高程模型。由于網格模型的生成步驟并非必須,且為了實現DEM精度的有效提升,在具體的DEM生成中,通常會將點云數據原作為其元數據,并根據實際需求來進行DEM分辨率的合理設置。在此過程中,需要將加密成果與自動化技術作為依托,在檢測區域內形成立體模型,并做好相應的參數確定,保障區域內存在核線影像。在對此類數據進行采集時,可直接自動生成數據點和視差曲線,并根據實際處理需求編輯好曲線間隔,使其準確切入測量出地面信息,完整呈現出被測區域內的地理與地貌狀態。在DEM模型的建立過程中,若需要將加密技術結合應用到測量區域中,則需要確定加密點,獲得加密數據并生成相應的三角網,將特征點、特征線和特征面數據作為依據,可有效確保三角網的準確性。通過這樣的方式,便可實現DEM模型的有效生成。
3.6 數字化正射影像生成
在通過無人機航空攝影測量技術進行測量的過程中,數字正射影像的生成是其影像數據快速處理中的一項主要內容。一般情況下,在數字化正射影像的生成過程中,需要將DEM模型用作其表面。對于數字化正射影像的具體尺寸,在具體處理中可將無人機航空攝影獲取的影像原始分辨率平均值作為依據來確定。按照所選表面區域的面積和像素尺寸輸入值,便可科學計算出數字化正射影像的生成尺寸,讓數字化正射影像得以科學生成。
3.7 成果導出
在無人機航空攝影測量中,成果導出就是DEM模型的導出以及數字化正射影像的導出。在DEM模型的導出中,可根據實際需求來選擇合理的像素大小以及地理投影。若DEM模型具有較大的范圍,導出時占用的系統內存可能較大,可能會對其導出效果產生一定程度的不良影響。為有效避免發生這一問題,在導出過程中可采用非很快導出的方式來進行處理。通常情況下,只需采用繪制圖形的方式將DEM的具體導出范圍指出。在數字化正射影像的導出中,其設置方法與DEM模型導出十分相似。通過Agisoft Photo Scan軟件的應用,可導出多種無人機航空攝影影像處理數據格式,包括World Wind Tiles格式、MBTileS格式、Goole Map Tiles格式、Goole KMZ格式、PNG格式以及JPEG格式等。對于Goole KMZ格式的結果,可添加到Goole Earth中進行查看[5]。通過這樣的方式,便可實現無人機航空攝影測量高清影像的有效獲取,且此類影像幾乎能夠達到無縫重疊效果。
4 結束語
無人機航空攝影測量技術是地理測量工作中的一種主流技術形式,該技術具有時效性強、簡單可靠、數據獲取快和成本低等應用優勢。本文對無人機航空攝影測量系統概述和特點進行分析,同時通過分析無人機航空攝影測量影像技術的數據處理方式,提出使用Agisoft Photo Scan軟件可實現影像數據的快速準確處理。Agisoft Photo Scan軟件主要流程包括無人機航拍數據準備、導入并對齊影像、生成密集點云、幾何圖元編輯、生成DEM、生成數字化正射影像以及成果導出等內容,該技術可以提高無人機航空攝影測量影像數據處理效率。■
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03