坐臥式下肢康復機器人的機構設計與仿真*
2022-09-30 08:49:08黎顥宇馮永飛劉國偉牛建業尹東穎
機械制造 2022年7期
關鍵詞:康復
□ 黎顥宇 □ 馮永飛,2 □ 劉國偉 □ 彭 旭 □ 牛建業 □ 尹東穎
1.寧波大學 機械工程與力學學院 浙江寧波 315211 2.唐山海佑機器人科技有限公司 河北唐山 063200 3.燕山大學 機械工程學院 河北秦皇島 066004
1 設計背景
腦卒中是一種常見疾病[1],在人口老齡化背景下,我國目前約有700萬腦卒中患者[2]。研究表明,腦卒中患者經過康復治療后,下肢功能會明顯得到改善[3]。然而,傳統康復訓練需要治療師幫助患者進行一對一治療,治療周期長、成本高[4-5]。下肢康復機器人的出現不僅有效解決了以上問題,而且為腦卒中患者下肢運動功能的恢復提供了新思路[6]。
康復機器人技術在患者康復過程中具有重要意義,近年來,下肢康復機器人成為機器人領域的研究熱點[7]。根據患者的訓練姿態,可以將下肢康復機器人分為站立式和坐臥式兩類。站立式下肢康復機器人以美國Vanderbilt大學設計的下肢康復機器人為代表[8],使用者可以借助前臂支撐拐杖或自動助步器等設備來維持身體平衡,安裝在臂部組件內的充電電池為機器人提供動力[9]。瑞士蘇黎世聯邦理工學院研發的康復機器人同樣是站立式下肢康復機器人[10],將懸掛系統與跑步機結合起來,患者的腿部關節可以通過預先設定的步態運動模式來引導,進而達到康復效果。類似的站立式下肢康復機器人還有日本筑波大學研制的下肢外骨骼式康復機器人[11]。站立式下肢康復機器人通過對人體下肢進行一定形式的固定,帶動下肢進行步態訓練,一般設置有減重設備,以減輕患者下肢對人體自身重力的承受。
相比站立式下肢康復機器人,坐臥式下肢康復機器人更適合腦卒中早期臥床患者。Yan Hao等[12]提出的坐臥式下肢康復機器人采用模塊化設計,能夠進行下肢髖、膝、踝三個關節的獨立訓練,根據預設信息,可以對不同患者自動進行腿長匹配。美國研究人員開發的一款坐臥式下肢康復機器人可以使患者的四肢按照特定的軌跡同時進行運動,但運動軌跡不可調整,并且功能較為單一[13]。這一款坐臥式下肢康復機器人成本較低,可以為患者減輕經濟壓力。坐臥式下肢康復機器人還包括土耳其Yildiz科技大學和Marmara大學聯合研制的下肢康復機器人[14]。當然,現有的大部分坐臥式下肢康復機器人僅能夠滿足患者在矢狀面內的康復需求。
為了恢復患者下肢精細化的運動能力,康復機器人需要對患者進行真實場景下的復雜作業訓練。由于空間多自由度康復機械腿的結構較為復雜,因此理論支撐不足,康復機器人在臨床康復方面還未得到廣泛應用。針對腦卒中早期臥床患者,研究具有冠狀面與矢狀面運動功能的下肢康復機器人具有重要意義。筆者設計了一種新型坐臥式下肢康復機器人,結合旋轉副滑動副平面二自由度機構,通過牽引患者足部,來實現患者下肢髖關節的屈伸與外展內收、膝關節的屈伸、踝關節的跖屈與背屈。
2 結構
所設計的坐臥式下肢康復機器人的結構如圖1所示,主要由底架、座椅升降組件、下肢康復訓練組件組成。下肢康復訓練組件作為主要的執行機構,分為左、右對稱的兩部分,對應患者的左右腿。

▲圖1 坐臥式下肢康復機器人結構
3 下肢康復訓練組件
下肢康復訓練組件如圖2所示。下肢康復訓練組件的本質是平面二自由度機構。伺服電機通過對應的線性模組驅動滑塊,實現運動。滑塊通過滑塊部旋轉副與方管進行連接,滑塊部旋轉副的軸線與水平面垂直。方管的另一端與腳部旋轉副相連,在腳部旋轉副上方固定有踏板組件。當兩個伺服電機以相同轉速工作時,線性模組上的滑塊帶動兩個滑塊部旋轉副同步向前或向后,進而實現患者矢狀面髖、膝、踝關節的屈曲與伸展運動。當兩個伺服電機的轉速存在速度差時,踏板組件會帶動患者實現髖關節在冠狀面內的外展與內收。

▲圖2 下肢康復訓練組件
為了保證下肢康復機器人在冠狀面內的安全性,在滑塊部旋轉副處設有機械限位,如圖3所示。滑塊部旋轉副開有導槽,與滑塊固定為一體的支撐托板上設有限位螺栓,可以對滑塊部旋轉副的轉動范圍進行限制。

▲圖3 機械限位
踏板組件如圖4所示。踏板通過固定支座與腳部旋轉副連接,通過連接板與固定支座相連。當踏板上受到患者腳部施加的力時,氣彈簧可以伸縮,使踏板繞轉軸5轉動。當踏板帶動患者腳部進行運動時,患者對踏板施加的力將產生變化,通過下肢的姿態變化自動調節矢狀面內的角度。

▲圖4 踏板組件
4 座椅升降組件
座椅升降組件如圖5所示。電動推桿的固定端固定于底架上,移動端固定于連接板1。連接板1與座椅固定連接。兩個直線軸承固定于連接板2,直線軸承的上端固定于連接板1,連接板2與底架連接。座椅的固定由直線軸承與電動推桿共同完成。在座椅升降過程中,通過電動推桿的推力帶動直線軸承在平行于電動推桿升降的方向移動,實現座椅高度的調節。

▲圖5 座椅升降組件
5 速度雅可比矩陣求解
選取左側下肢康復訓練組件作為研究對象,建立連桿模型,如圖6所示。連桿AB、AD分別表示方管1和方管2,S1、S2分別表示線性模組上的滑塊。連桿AB與滑塊S1、連桿AD與滑塊S2均通過轉動副連接。以滑塊S1所在的線性模組軸心建立Y軸,以垂直于Y軸方向建立X軸,以座椅中心在Y軸方向的投影為坐標原點O。設連桿末端點A坐標為(xa,ya),連桿AB、AD的長度分別為l1、l2。連桿AB與Y軸的夾角為θ1,連桿AD與直線ED的夾角為θ2。C1、C2分別代表連桿AB、AD的質心,設C1的坐標為(xC1,yC1),C2的坐標為(xC2,yC2),BC1的長度為R1,DC2的長度為R2。滑塊S1、S2所在軸線之間的距離為m,滑塊S1、S2到X軸的距離分別為y1、y2。

▲圖6 連桿模型
根據桿間約束,可以列出方程:
(1)
對于坐臥式下肢康復機器人,有約束:
(2)
由式(1)、式(2)可以求得點A位置的正解為:
(3)
(4)
(5)
(6)
(7)
(8)
點A位置逆解公式為:
(9)
對式(9)等號兩側求導,可得:
(10)

將式(10)進一步轉換,可得矩陣形式:
(11)
由式(11)可得速度雅可比矩陣J為:
(12)
6 基于輪廓誤差的交叉耦合控制
傳統的控制方法忽略操作空間中的誤差,難以保證機器人在操作空間中的軌跡跟蹤精度。筆者提出基于輪廓誤差的交叉耦合控制,以達到對末端誤差直接進行干預的目的,進而提高坐臥式下肢康復機器人的安全性。
6.1 軌跡規劃
為保證坐臥式下肢康復機器人的訓練軌跡不對電氣設備產生沖擊,需要驗證所設計的訓練軌跡關于時間的位移s、速度v、加速度a等函數曲線是否平滑且柔順。

l(t)=a0+a1t+a2t2+a3t3+a4t4+a5t5
(13)
式中:ai為待求解因數;t為時間。
l(0)=0
(14)
l(tf)=l
(15)

(16)
(17)

(18)
(19)
結合式(13)~式(19),對因數ai進行求解,可得點A位移s、速度v、加速度a關于時間t的函數多項式,并沿X軸和Y軸分解,得:
(20)
(21)
(22)
(23)
(24)
(25)
6.2 輪廓誤差模型
輪廓誤差定義為當前實際位置到期望軌跡的最短距離。前文設計的訓練軌跡為直線,由此對直線輪廓的誤差進行建模分析。直線輪廓誤差模型如圖7所示,設訓練軌跡為平面坐標系中的直線OT。直線OT與X軸正方向夾角為θ,點T為點A的目標位置,其坐標為(xT,yT),點P為點A的實際位置,其坐標為(xP,yP)。
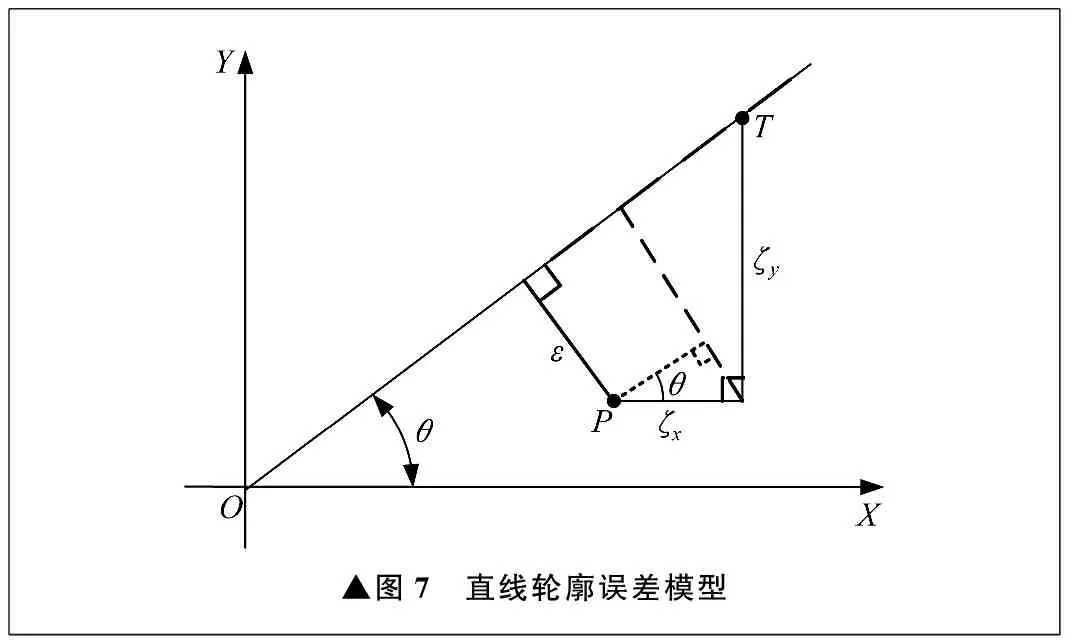
▲圖7 直線輪廓誤差模型
根據直線輪廓誤差模型的幾何關系,可得X軸方向的輪廓誤差ζx為xT-xP,Y軸方向的輪廓誤差ζy為yT-yP。由平面輪廓誤差的定義可知,點A的輪廓誤差ε為:
ε=ζycosθ-ζxsinθ
(26)
6.3 比例微分交叉耦合控制器
傳統比例微分控制結構如圖8所示。傳統的多軸控制各關節多采用傳統比例微分控制,各軸之間獨立進行控制,控制過程中沒有考慮輪廓誤差的大小。交叉耦合控制根據輪廓誤差,結合控制系統的具體結構,按照特定方式將輪廓誤差補償到各軸。
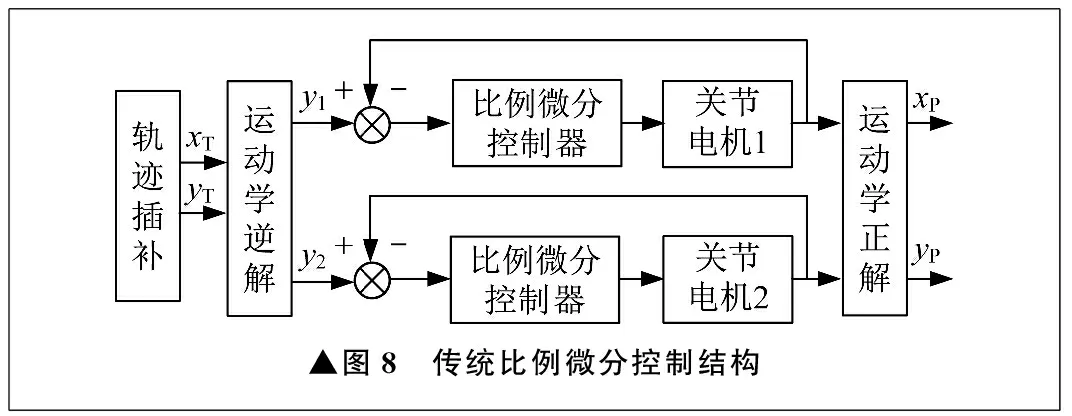
▲圖8 傳統比例微分控制結構


▲圖9 比例微分交叉耦合控制器結構
(27)
滑塊S1、S2的輪廓誤差εy1、εy2通過比例微分控制器進行處理,將處理后的結果作為各軸比例微分控制器輸入的一部分。
6.4 仿真
規定訓練軌跡起始坐標為(-10 cm,45 cm),終點坐標為(5 cm,90 cm),可以得到訓練軌跡的位移、速度、加速度多項式為:
l(t)=0.474 3t3-0.071 2t4+0.002 8t5
(28)
(29)
(30)
為了更直觀地判斷訓練軌跡是否平滑且柔順,通過MATLAB軟件繪制笛卡爾空間位移、速度、加速度曲線,依次如圖10、圖11、圖12所示。由圖10~圖12可以看出,X軸、Y軸方向上的位移、速度、加速度均滿足平滑且柔順的要求。

▲圖10 笛卡爾空間位移曲線▲圖11 笛卡爾空間速度曲線▲圖12 笛卡爾空間加速度曲線
滑塊S1、S2的位移、速度、加速度曲線依次如圖13、圖14、圖15所示。由圖13~15可以看出,經過規劃的直線軌跡在滑塊S1、S2處的位移、速度、加速度均平滑連續。

▲圖13 滑塊位移曲線▲圖14 滑塊速度曲線▲圖15 滑塊加速度曲線
為了驗證比例微分交叉耦合控制器的正確性,進一步以該直線軌跡作為參考軌跡,分別以傳統比例微分控制和比例微分交叉耦合控制作為控制策略,以前文建立的連桿模型作為控制對象,進行仿真分析。直線輪廓誤差和直線輪廓誤差絕對值仿真結果分別如圖16、圖17所示。由圖16和圖17可以看出,以直線軌跡作為參考軌跡時,比例微分交叉耦合控制產生的輪廓誤差明顯小于傳統比例微分控制。

▲圖16 直線輪廓誤差仿真結果▲圖17 直線輪廓誤差絕對值仿真結果
7 結束語
筆者設計了一種新型坐臥式下肢康復機器人,可以使患者在冠狀面與矢狀面內運動。通過建立連桿模型,進行運動學分析,并求解速度雅可比矩陣。針對腦卒中早期臥床患者,規劃一條直線軌跡,建立輪廓誤差模型,結合傳統比例微分控制,設計基于輪廓誤差的比例微分交叉耦合控制器,并進行仿真分析,驗證相比傳統比例微分控制的優越性。未來筆者將深入分析這一坐臥式下肢康復機器人的臨床安全性與有效性。
猜你喜歡
康復(2023年11期)2023-11-20 07:45:54
康復(2023年14期)2023-11-20 06:04:54
中老年保健(2021年4期)2021-08-22 07:08:14
護理與康復(2021年2期)2021-03-05 08:10:44
家庭醫學(下半月)(2020年1期)2020-05-11 02:05:46
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
反射療法與康復醫學(2017年7期)2017-01-16 01:11:02
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45
