基于憶阻器的隨機(jī)神經(jīng)網(wǎng)絡(luò)的穩(wěn)定性
2022-09-29 10:53:46王芬
工程數(shù)學(xué)學(xué)報 2022年4期
王 芬
(廣東金融學(xué)院金融數(shù)學(xué)與統(tǒng)計學(xué)院,廣州 510521)
0 引言
人工神經(jīng)網(wǎng)絡(luò)是模擬生物神經(jīng)系統(tǒng)的組織結(jié)構(gòu)和系統(tǒng)功能的高度復(fù)雜的非線性動力系統(tǒng),其中突觸是神經(jīng)網(wǎng)絡(luò)中神經(jīng)元信號的傳輸通道,也是人類大腦學(xué)習(xí)和記憶的基本組成單位,合理的突觸仿生是實現(xiàn)神經(jīng)形態(tài)計算的重要基礎(chǔ)[1–2]。在傳統(tǒng)的神經(jīng)網(wǎng)絡(luò)中,一般使用集成電路對突觸進(jìn)行模擬。1971 年,美國學(xué)者Chua 基于電路理論的完備性提出了憶阻器的概念[3],稱其為第四種基本電路元件。2008 年,Strukov 等制造出了固體憶阻,并把他們的結(jié)果發(fā)表在Nature 雜志上[4]。憶阻器是一種具有“記憶”功能的納米級的天然非線性電阻,其阻值能夠跟隨流過器件本身的電流的變化而改變,并存儲電流斷開時的電阻值。憶阻器同時具備低功耗、學(xué)習(xí)和存儲功能,給人工神經(jīng)網(wǎng)絡(luò)中高密度的突觸模擬提供了一種極好的選擇[5]。目前,憶阻神經(jīng)網(wǎng)絡(luò)已經(jīng)在模式識別、智能計算、大數(shù)據(jù)分析、信號處理和圖像處理等方面表現(xiàn)出了良好的應(yīng)用潛質(zhì)。
迄今為止,針對憶阻神經(jīng)網(wǎng)絡(luò)的動力學(xué)行為及其控制的討論還處于起步階段,研究焦點之一是針對憶阻神經(jīng)網(wǎng)絡(luò)的穩(wěn)定性、同步控制等內(nèi)容的分析[6–11]。
另一方面,按照生理學(xué)的觀點,生物神經(jīng)元本質(zhì)上是隨機(jī)的。然而,在隨機(jī)干擾的情況下,神經(jīng)網(wǎng)絡(luò)的動力學(xué)行為變得異常復(fù)雜[12–25]。
2019 年,基于不動點定理和激活函數(shù)的幾何性質(zhì),研究者分析了基于憶阻器的模糊神經(jīng)網(wǎng)絡(luò)的多穩(wěn)定性和多周期性問題[10]。2017 年,Jiang 等利用Lyapunov 泛函法、拓?fù)涠壤碚摚芯苛司哂行孤稌r滯的憶阻神經(jīng)網(wǎng)絡(luò)周期解的全局指數(shù)穩(wěn)定性[11]。2017 年,Rao 等獲取了具有馬爾科夫跳變的脈沖BAM 神經(jīng)網(wǎng)絡(luò)的隨機(jī)穩(wěn)定性的LMI 判別條件[18]。遺憾的是,目前針對基于憶阻器的隨機(jī)神經(jīng)網(wǎng)絡(luò)的研究并不多見。怎樣在隨機(jī)擾動的環(huán)境下研究基于憶阻器的神經(jīng)網(wǎng)絡(luò)的穩(wěn)定性,成為了擺在廣大研究者面前的重要課題。
綜上所述,本文將通過構(gòu)造合適的Lyapunov 泛函,應(yīng)用It?o 微分公式、微分包含和集值映射理論等,以基于憶阻器的隨機(jī)神經(jīng)網(wǎng)絡(luò)為研究對象,分析確保該系統(tǒng)的均方指數(shù)穩(wěn)定的充分判別條件。
符號說明:R 代表實數(shù)域;Rn表示n維歐式空間;R+代表非負(fù)實數(shù)集。
1 模型與預(yù)備知識
考慮如下基于憶阻器的隨機(jī)神經(jīng)網(wǎng)絡(luò)模型

其中xi(t)為加在電容器Ci兩端的電壓;fi(xi(·))為神經(jīng)元的激勵函數(shù);τ為離散時滯;aij(xi(t)),bij(xi(t))(i= 1,2,···,n),d> 0 表示反饋鏈接權(quán)重,其亦可以寫成如下形式

其中Kij和Wij均代表憶阻的憶感。根據(jù)憶阻的特性及其電壓與電流之間的曲線特點,為方便研究,可令

其中切換界值Ti>0(i,j=1,2,···,n);、和都是常數(shù)。ω(t)=[ω1(t),ω2(t),···,ωn(t)]T ∈Rn是n維Brownian 運動,定義在帶有自然域流{Ft}t≥0上的完備概率空間(?,F,P)上。
系統(tǒng)(1)初始條件為x(s)=φ(s),s ∈[?τ,0],其中x(s)=[x1(s),x2(s),···,xn(s)]T為系統(tǒng)在時刻s的狀態(tài)變量;φ(s)=[φ1(s),φ2(s),···,φn(s)]T,φi(s)是有界連續(xù)函數(shù)。
本文中所有系統(tǒng)的解都是在Filippov 的意義下,在這里

通過微分包含和集值映射理論,系統(tǒng)(1)可以描述為


成立。
若不考慮隨機(jī)擾動的影響,則系統(tǒng)(1)可以簡化為

為了獲得主要結(jié)果,接下來給出如下定義和假設(shè)。
定義1[25]如果存在正數(shù)K>1 和α>0,使得系統(tǒng)(1)的解滿足

則稱系統(tǒng)(1)的平衡解均方指數(shù)穩(wěn)定。
定義2[26]如果存在正數(shù)β>1 和α>0,使得系統(tǒng)(4)的解滿足

則稱系統(tǒng)(4)的解全局指數(shù)穩(wěn)定。
引理1(公式)[27]令u=u(t,x1,x2,···,xn)T是定義在[t0,T]×Rn上的連續(xù)函數(shù)且存在連續(xù)偏導(dǎo)數(shù)ut、uxi、uxixj(i,j=1,2,···,n)。若n維隨機(jī)過程x(t)=[x1(t),x2(t),···,xn(t)]T在[t0,T]滿足

則隨機(jī)過程V(t,x(t))=u(t,x1,x2,···,xn)T的隨機(jī)微分為

其中
假設(shè)1激勵函數(shù)fi(·)滿足fi: R→R,fi(0) = 0。同時,存在正數(shù)Fi,使得對于任意ξ ?=0,ξ ∈R,不等式

成立,其中i=1,2,···,n。
假設(shè)2σi: R+×R×R→R 滿足局部Lipschitz 連續(xù)性,并且σi(t,0,0) = 0。同時,存在非負(fù)實數(shù)ui和vi,使得不等式

成立,其中i=1,2,···,n。
2 主要結(jié)論
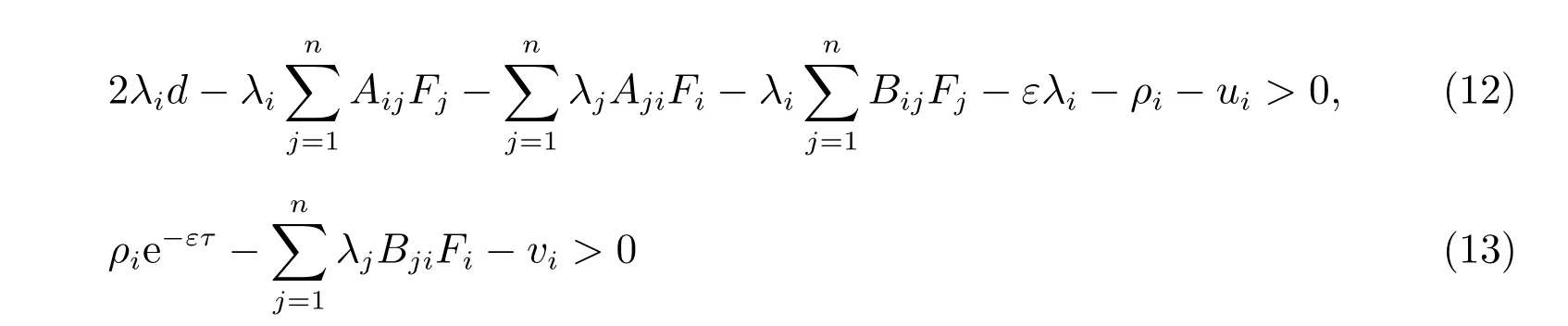
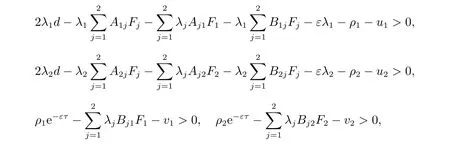
定理1若系統(tǒng)(1)滿足假設(shè)1 和假設(shè)2,且存在正數(shù)ε、λi、ρi(i= 1,2,···,n),使得下列的不等式組

成立,則系統(tǒng)(1)均方指數(shù)穩(wěn)定。
證明 構(gòu)造如下正定的Lyapunov 泛函

其中

將(9)式和(10)式代入(8)式,可得
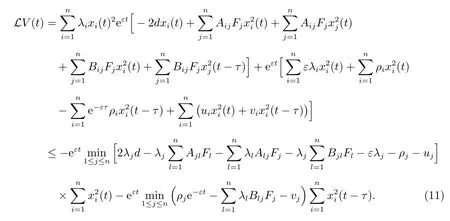
若存在正實數(shù)ε、λi、ρi(i=1,2,···,n),使得下列不等式
成立,則LV(t)≤0。進(jìn)一步,可得

同時,可以知道

因而,可得

注1在文獻(xiàn)[28]中,研究者利用微分包含理論,研究了憶阻遞歸神經(jīng)網(wǎng)絡(luò)的穩(wěn)定性問題。然而,文獻(xiàn)[28]并沒有考慮隨機(jī)擾動的影響。本文在隨機(jī)擾動的環(huán)境下,利用It?o 微分公式、微分包含,綜合考慮了基于憶阻器的神經(jīng)網(wǎng)絡(luò)的均方指數(shù)穩(wěn)定性問題。因而,較文獻(xiàn)[28]有更加廣泛的適用范圍。
注2在文獻(xiàn)[29]中,基于It?o 微分公式、Lyapunov-Krasovskii 泛函,研究者獲得了用線性矩陣不等式表示的具有漏泄時滯的隨機(jī)神經(jīng)網(wǎng)絡(luò)指數(shù)穩(wěn)定的充分條件。然而,文獻(xiàn)[29]并沒有在基于憶阻器的前提下展開研究。本文結(jié)合憶阻器在突觸模擬中的明顯優(yōu)勢,使用憶阻器模擬突觸。因而,本文的結(jié)論為神經(jīng)網(wǎng)絡(luò)在設(shè)計過程中高密度突觸的選擇提供了更加寬廣的理論基礎(chǔ)。
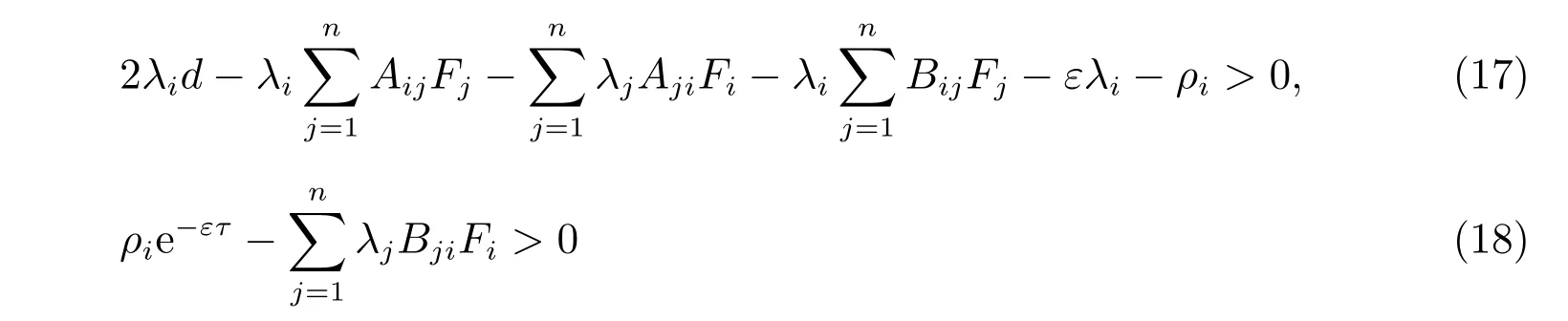
接下來,研究不具有隨機(jī)項的憶阻神經(jīng)網(wǎng)絡(luò)系統(tǒng)(4)的穩(wěn)定性,可以用類似定理1 的證明方法,得到下述推論。
推論1若系統(tǒng)(4)滿足假設(shè)1,且存在正數(shù)ε、λi、ρi(i= 1,2,···,n),使得下列的不等式組成立,則系統(tǒng)(4)全局指數(shù)穩(wěn)定。
注3可以考慮在系統(tǒng)(1)中加入脈沖因子,依據(jù)類似于定理1 的分析方法,研究基于憶阻器的隨機(jī)脈沖神經(jīng)網(wǎng)絡(luò)的均方指數(shù)穩(wěn)定性,更深層次地展開針對隨機(jī)憶阻神經(jīng)網(wǎng)絡(luò)的研究。
3 數(shù)值仿真
例1考慮如下的基于憶阻器的隨機(jī)神經(jīng)網(wǎng)絡(luò)

其中
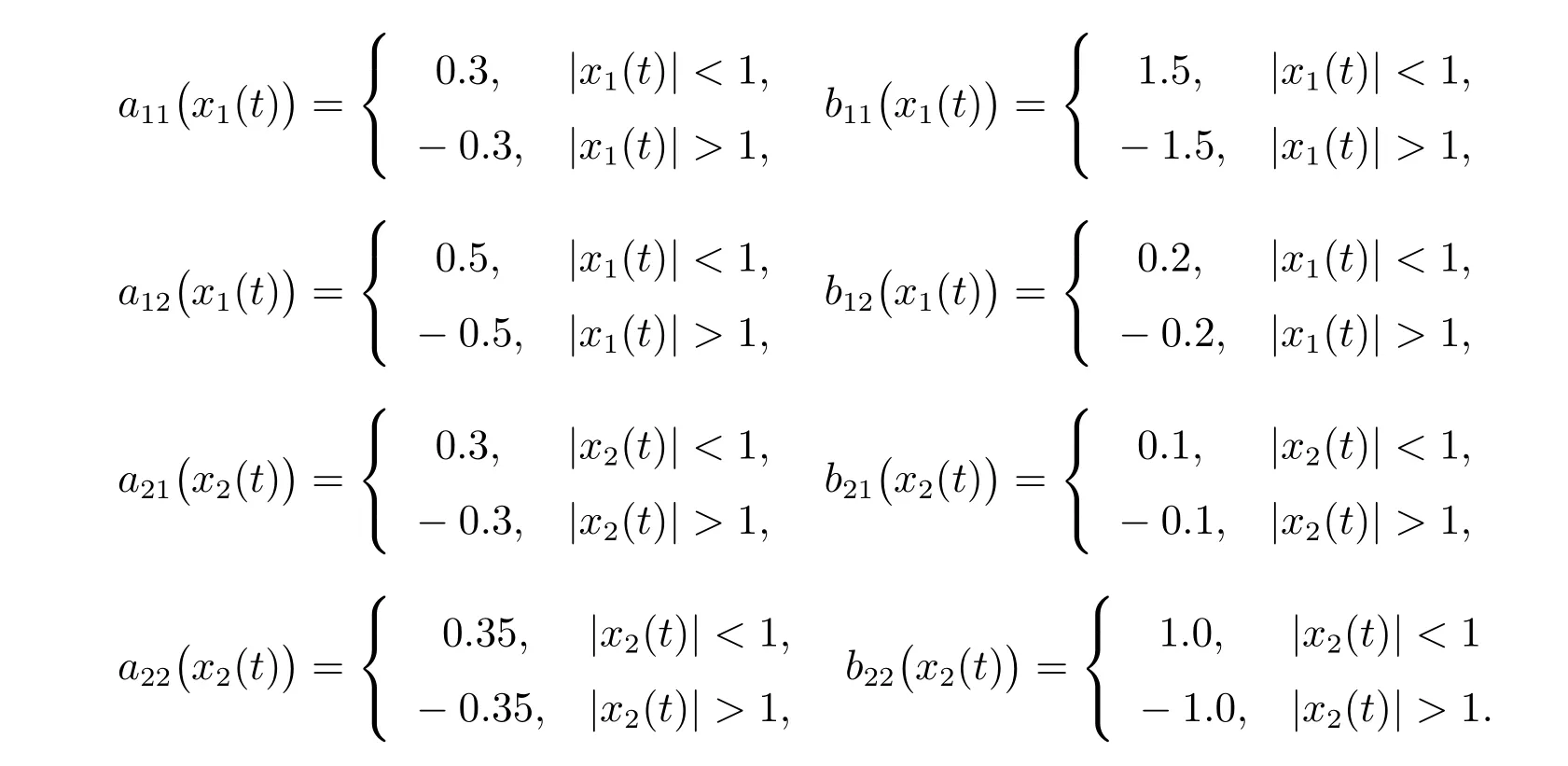
再由
易知
取λ1=λ2=2,ρ1=ρ2=10,ε=1,經(jīng)過簡單的計算可得
則由定理1 可得,系統(tǒng)(19)均方指數(shù)穩(wěn)定。取系統(tǒng)的初始條件為x1(t) = 50,x2(t) =?20,經(jīng)過Matlab 仿真可以得到系統(tǒng)(19)中的x(t)的狀態(tài)曲線,如圖1 所示。
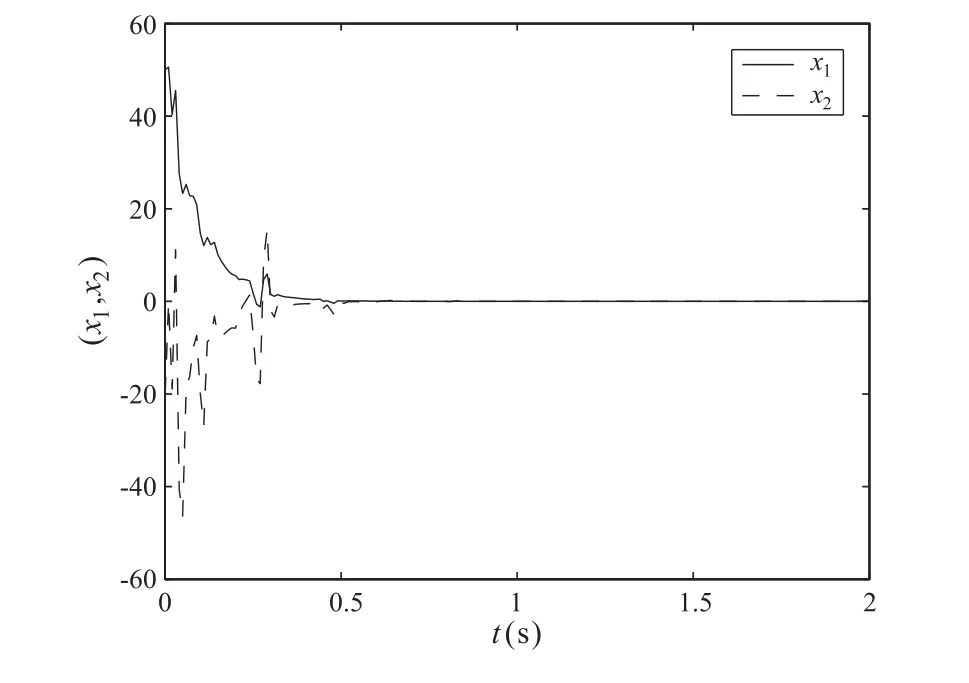
圖1 系統(tǒng)(19)中的x(t)的狀態(tài)曲線圖
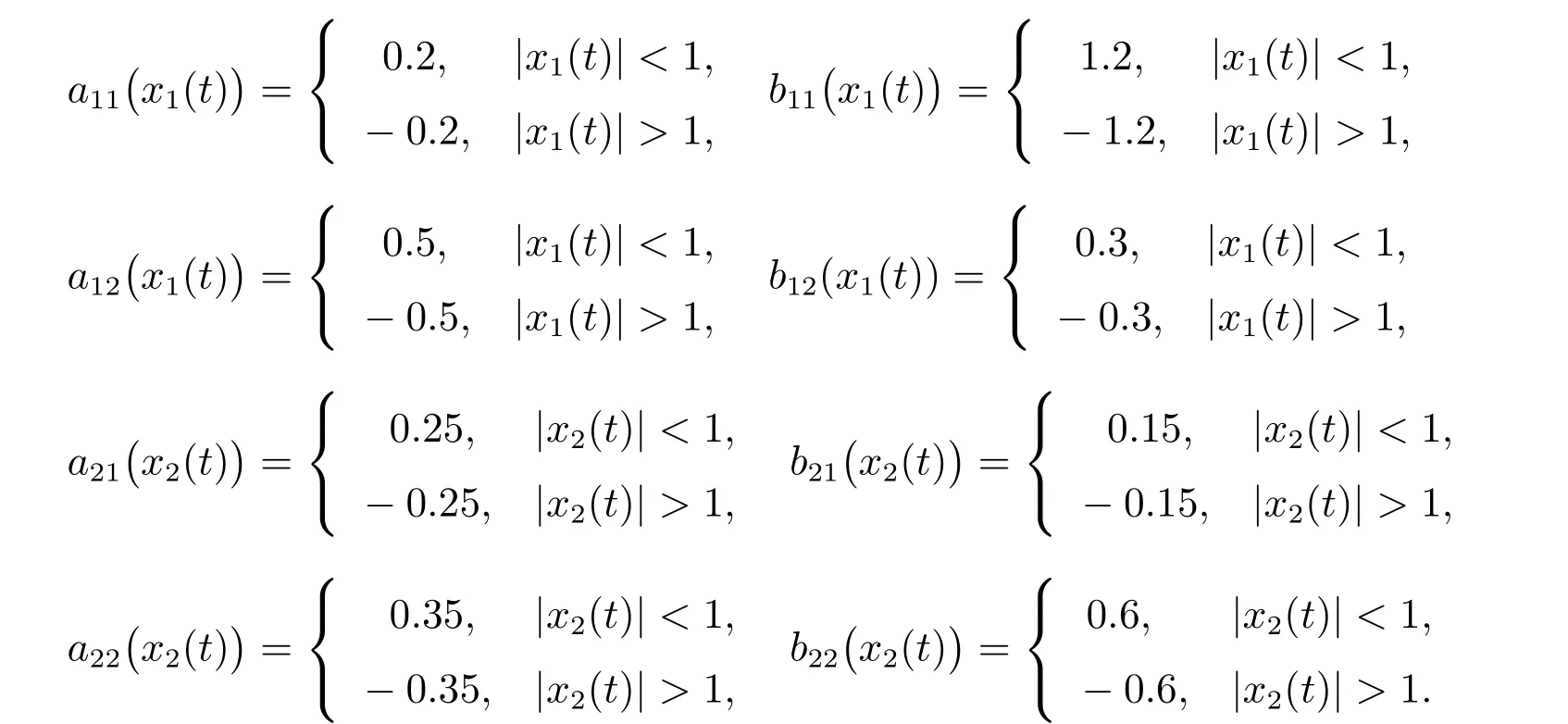
例2考慮如下的基于憶阻器的神經(jīng)網(wǎng)絡(luò)
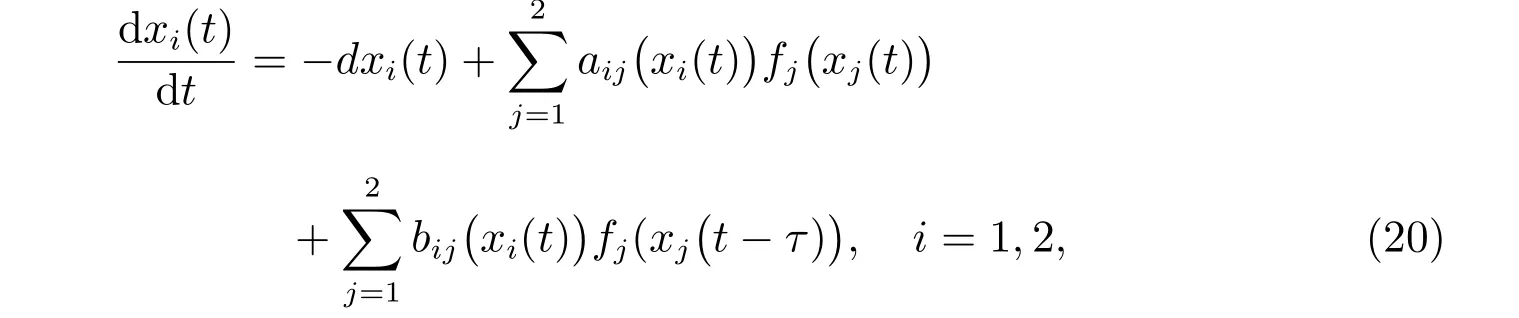
其中
另有

取λ1=λ2=2.5,ρ1=ρ2=10,ε=1,經(jīng)過簡單的計算可得

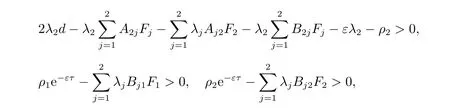
則由推論1 可得,系統(tǒng)(20)全局指數(shù)穩(wěn)定。取系統(tǒng)的初始條件為x1(t) =?35,x2(t) =35,經(jīng)過Matlab 仿真可以得到系統(tǒng)(20)中的x(t)的狀態(tài)曲線,如圖2 所示。
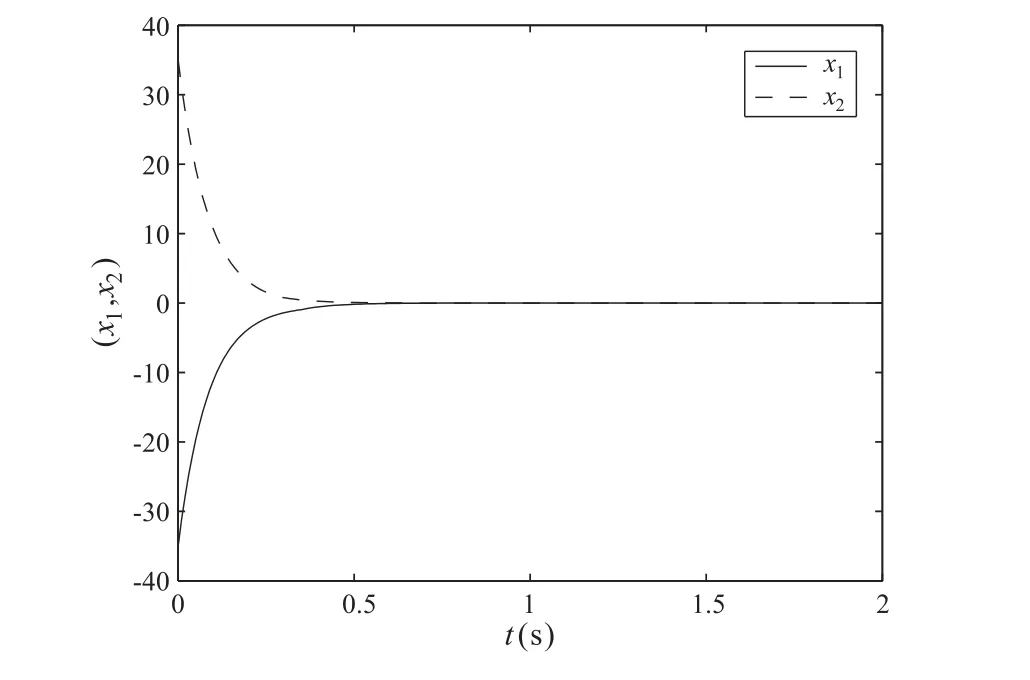
圖2 系統(tǒng)(20)中的x(t)的狀態(tài)曲線圖
4 結(jié)論
本文以隨機(jī)擾動下的憶阻神經(jīng)網(wǎng)絡(luò)為研究對象,應(yīng)用Lyapunov 泛函、It?o 微分公式和不等式技巧,得到了該系統(tǒng)均方指數(shù)穩(wěn)定的充分判別條件。最后,通過兩個仿真例子,說明了所得結(jié)論的有效性。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
體育科技文獻(xiàn)通報(2022年3期)2022-05-23 13:46:54
天津外國語大學(xué)學(xué)報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
科技傳播(2019年22期)2020-01-14 03:06:54
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
民用飛機(jī)設(shè)計與研究(2019年4期)2019-05-21 07:21:24
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34