低頻液體表面波衍射光斑分布研究
2022-09-27 02:22:22王江宏
系統仿真技術 2022年2期
王江宏
(陜西國防工業職業技術學院, 陜西西安 710300)
在激光應用領域里, 光的衍射原理在光學測量方面得到了廣泛應用。最早發現衍射現象的是意大利物理學家格里馬地[1], 其在1665年出版的書中記載了觀察到光線通過棍棒后的強弱分布, 發現光的分布沒有截然的邊界, 不能用當時通行的光的微粒說來解釋。1979年, Weisbuch等[2]首次提出了用液體表面波實現光學衍射光柵, 并以此建立了液體表面波的光學測量方法。人們認為, 平面波形成的衍射條紋在分布中與其正負級數是一一對應的。那么是否所有的衍射條紋都是對應分布的, 衍射條紋的相對光強又遵循哪些規律。由傳統理論結合聲光理論得知, 液體表面波波長遠遠大于激光波長時, 仍可觀察到清晰并且穩定的衍射圖樣[3-5]。
目前國內研究中張曉琳[6-7]等用激光干涉方法證明水下聲信號的可行性。苗潤才團隊運用了激光衍射方法探測水下聲信號, 并在以往的研究中, 對液體表面振幅與激發深度[8-10]、衰減[11-12]、衍射光斑不對稱性[13-14]等物理關系進行了研究。那么聲源在不同深度位置時, 液體表面波是如何分布的。基于以上研究基礎, 本文對實驗系統裝置進行改進, 采用絲桿直線模組來控制聲源入水深度。承托水下聲源部分采用Z字形拖桿, 并與定位器連接, 用來調節聲源入水深度, 定位器調節精度可以達到毫米級。此部分改進裝置提高了測量精度, 在實際應用中具有很強的實踐指導意義。
本文主要研究當水下聲源處于不同深度位置時, 液體表面波的光衍射現象, 以期從獲取的衍射圖樣中判斷其分布特性。
1 水下聲信號探測系統實驗裝置
1.1 實驗系統
實驗裝置圖如圖1所示, 分別為有機玻璃樣品池和液體樣品, 低頻信號發生器和表面聲波激發源, 473 nm藍光激光光源, 水下聲源定位器, 衍射圖樣的采集和數據處理系統。

圖1 水下聲信號探測系統實驗裝置及原理圖Fig.1 Equipment and schematic diagram of underwater acoustic signal detection system
1.2 衍射光強原理
對斜射到表面波的激光束進行調制, 實現聲光衍射。入射光波在有表面聲波存在的介質表面發生反射后在光屏上可以觀察到清晰的衍射圖樣, 激光光斑長軸長度遠小于入射點到光屏的長度, 所以該衍射近似為夫瑯禾費衍射。假設該波紋形狀恒定, 為線性波, 則表面波可表示為

其中A為表面波的振幅,k為表面波波矢量,k=2π/Λ。
由傅里葉光學知識可知, 經表面波調制后的光場分布[15]為
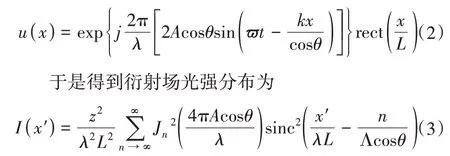
式(3)中,ω為表面波角頻率,z為激光光斑的寬度,x′為衍射光斑位于光屏的坐標,L為光屏到激光入射點的距離,Jn為第一類貝塞爾函數, 其中n為整數, rec(tx/L)為矩陣函數, sinc(x)為特殊函數,Jn2表示為第n級衍射條紋的相對強度, sinc2函數表示第n級衍射條紋形狀及位置。
通過上面的分析可知, 表面波波長決定衍射的空間分布。
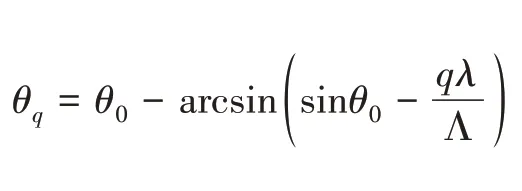
假設以激光作為入射光源, 從空中以一定角度入射到水面, 由光的波動原理和表面聲光效應可知, 其照射到水面后, 在水表面發生聲光衍射現象。為便于討論, 假設接收屏上某一點P, 若P點對應的衍射角為θ, 則相鄰兩狹縫間的光程差為δ, 結合光柵方程, 得出第q級衍射光斑的衍射角為
討論

從上述討論中可以看出, 除0級外, 其余衍射級的正負級衍射條紋的衍射角大小不相等, 那么在接收屏上呈現的衍射光斑分布就不對稱。
2 實驗結果與分析
實驗選擇473 nm藍光激光器作為激光光源, 聲源頻率設定為120 Hz, 接收屏與激光入射點的距離為5.5 m, 水池深度尺寸為0.4 m。激光束以1.47 rad入射角斜射到液體表面上, 通過調整角度, 使得激光束通過波形轉換器后照射在液體表面, 在觀察屏上可以看到清晰的衍射圖樣。實驗過程中, 通過調節絲桿直線模塊的定位器旋鈕, 使得水下聲源與水面的距離發生變化, 得到相應的水下深度位置的衍射圖樣。當水下聲源深度離水面6.5 cm時, 用CCD拍攝衍射圖樣, 每次增加1.0 cm聲源深度, 直到聲源深度至10.5 cm位置。圖2是聲源在不同深度位置采集的液體表面波衍射圖樣。可見衍射圖樣中心光斑強度及大小相對穩定, 隨著聲源入水深度的增加, 衍射光斑正負高衍射級光斑強度逐漸減小, 高衍射級光斑逐漸消失。

圖2 聲源不同入水深度的相對光強衍射圖樣Fig.2 Relative light intensity diffraction pattern of sound source at different water depth
從圖2可以看出, 衍射光斑對比度很高, 同時也觀察到衍射光斑的級數及亮度的變化。在聲源入水深度為6.5 cm處時, 可以看到±3級光斑, 逐漸增加聲源入水深度, 在入水深度達到7.5 cm時, ±3級光斑消失, ±2級光斑亮度相對較亮, 繼續增加聲源入水深度到10.5 cm時, ±2級光斑亮度相對減弱。
使用Matlab軟件編輯程序, 并對衍射光斑圖樣進行處理分析, 得到水下聲源深度與相對光強的三維關系圖。相對光強曲線如圖3所示。
(1)通過三維衍射光斑圖對比可知, 在聲源深度變化過程中, 光斑強度隨著聲源入水深度位置的增加而減小, 光斑衍射級數也隨之產生變化。從圖3中可直觀地看出, 聲源入水深度不斷增加, 光斑的亮條紋數在不斷減少, 并且呈不對稱減少。
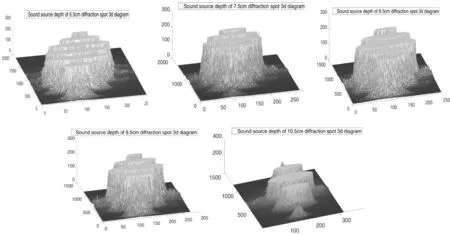
圖3 衍射光斑掃描圖Fig.3 Diffraction pattern
(2)對聲源在不同深度位置時衍射光斑的每一級光斑大小進行分析可知, 0級光斑和±1級光斑的直徑變化趨勢基本穩定, 但是隨著聲源位置深度的不斷增加, ±2級光斑的大小逐漸減小, 如圖4所示。

圖4 衍射光斑大小分析圖Fig.4 Diffraction spot size analysis diagram
(3)由光斑直徑隨著聲源深度的變化關系可知, 聲源深度不斷增加, ±2級光斑直徑逐漸變小, 衍射光斑尺寸像素減小, 并且兩者之間呈非線性關系。對采集的衍射圖樣用Matlab軟件進行分析, 通過對光斑位置的分析, 得到各級衍射光斑的間距值。當水下聲源處于6.5 cm位置時, 得出±1級衍射光斑與0級衍射光斑的相對間距為X+10=25pixle,X-10=24pixle, 同理,X+20≠X-20, 同級光斑的正負衍射級間距差基本在毫米量級, 肉眼觀察不出它的分布不對稱性。當水下聲源深度逐漸增加, 可以看出X+10≠X-10, 同理,X+20≠X-20。這表明各級衍射光斑相對于0級衍射光斑呈現出的不對稱性具有普遍性, 如圖5所示。
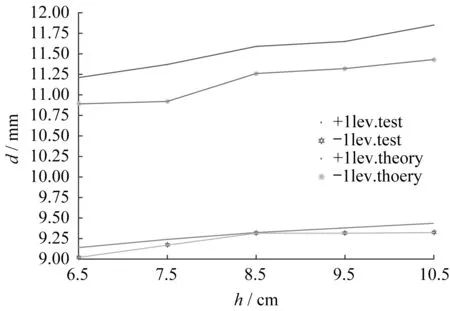
圖5 不同聲源深度的光斑間距Fig.5 Spot spacing at different source depths
3 結 論
根據聲光衍射效應, 水下低頻聲信號探測裝置采用絲桿直線模組來控制移動, 可精確控制聲源入水深度。通過調節直線模組, 改變水下聲源與水面的深度, 在接收屏上得到高清衍射光斑。實驗室環境中, 在低頻液體表面波和入射激光光波波長不比擬的條件下, 觀察到了衍射現象, 并獲得了清晰的衍射圖樣。
當激光斜射到受聲源激勵的液體表面波時, 通過改變聲源入水的深度位置, 用CCD采集獲得一系列不同深度的衍射光斑圖。且衍射光強度隨著聲源深度增加逐漸減弱。通過對衍射光斑大小的分析, 發現衍射光斑大小隨著聲源深度的增加逐漸減小。
分析衍射圖樣位置, 得知衍射光斑在不同水下聲源深度位置, 分布具有不對稱性。通過仿真和實驗數據對比可知, 隨著水下聲源深度的增加, 衍射光斑的級次在減少, 并且級次也表現出不對稱性。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55