基于紅外陣列傳感器的火源定位方法
2022-09-27 02:21:52李向國(guó)梅志千朱燈林
系統(tǒng)仿真技術(shù) 2022年2期
王 洋, 李向國(guó), 梅志千, 朱燈林
(河海大學(xué)機(jī)電工程學(xué)院, 江蘇常州 213022)
隨著經(jīng)濟(jì)不斷發(fā)展, 大型空間建筑物的數(shù)目迅速增多。這類建筑空間結(jié)構(gòu)復(fù)雜, 電氣設(shè)施眾多, 人口聚集, 潛在火災(zāi)危險(xiǎn)性較大, 滅火難度也較高[1]。因此, 大型空間建筑在火災(zāi)早期的自救非常重要, 然而傳統(tǒng)的滅火系統(tǒng)已然無法為其提供較高的保障, 開發(fā)一款可靠的大空間自動(dòng)跟蹤定位消防水炮系統(tǒng)就顯得極為重要。
自動(dòng)跟蹤定位消防水炮系統(tǒng)是一類集火災(zāi)探測(cè)、火源定位、遠(yuǎn)距離自動(dòng)滅火于一體的消防滅火系統(tǒng)[2-4]。近年來自動(dòng)跟蹤定位消防水炮系統(tǒng)迅速發(fā)展[5-10], 大量研究人員對(duì)其進(jìn)行了多方面的深入研究, 取得了豐碩的成果。鄔琳琳等[11]采用窄縫十字定位原理, 通過轉(zhuǎn)動(dòng)消防水炮進(jìn)行全空間掃描, 使位于交叉的十字窄縫處的紅外熱釋電傳感器產(chǎn)生報(bào)警信號(hào)實(shí)現(xiàn)火源定位。這種定位方式操作簡(jiǎn)單, 但是耗時(shí)較長(zhǎng), 定位誤差較大且無法定位火源中心。伴隨著計(jì)算機(jī)技術(shù)與圖像處理算法的不斷進(jìn)步, 基于視覺的火源定位技術(shù)逐漸成為自動(dòng)消防水炮的研究熱點(diǎn)。儲(chǔ)海東等[12]利用紅外圖像處理算法, 對(duì)火災(zāi)所產(chǎn)生的典型特征進(jìn)行檢測(cè), 并依據(jù)雙目視覺定位原理實(shí)現(xiàn)火源定位。基于計(jì)算機(jī)視覺的火源定位精度較高, 可以有效定位大型空間建筑內(nèi)的火源[13]。然而, 它很容易受到強(qiáng)光、其他物體的干擾, 導(dǎo)致錯(cuò)誤識(shí)別, 而且數(shù)字化圖像處理需要消耗大量的時(shí)間, 導(dǎo)致定位性能下降[14-15]。
針對(duì)現(xiàn)有的自動(dòng)跟蹤定位消防水炮系統(tǒng)存在定位時(shí)間長(zhǎng)、定位精度低等問題, 本文提出了一種基于紅外陣列傳感器的火源快速定位方法。該方法在探測(cè)到火源的基礎(chǔ)上, 采用紅外熱成像技術(shù)獲取火源的紅外圖像, 然后在紅外圖像上利用圖像重心算法計(jì)算火源重心坐標(biāo), 并根據(jù)火源重心與圖像中心的偏差對(duì)消防水炮進(jìn)行反饋控制, 實(shí)現(xiàn)火源精確高速定位。
1 火源定位方法設(shè)計(jì)
為了提高火源定位的速度和效率, 增加精確性, 減少定位誤差, 本文設(shè)計(jì)了自動(dòng)跟蹤定位消防水炮系統(tǒng), 其主要采用了MLX90640紅外焦平面陣列傳感器進(jìn)行火源定位。
當(dāng)自動(dòng)跟蹤定位消防水炮系統(tǒng)的火災(zāi)探測(cè)模塊探測(cè)到火災(zāi)后, 系統(tǒng)開始自動(dòng)定位火源。為了提高火源定位效率, 在定位之前先判斷火源是否在MLX90640的視場(chǎng)內(nèi)。通過MLX90640探測(cè)當(dāng)前視場(chǎng)內(nèi)的溫度, 當(dāng)最大溫度值超過了所設(shè)的閾值, 就表明當(dāng)前視場(chǎng)中存在火源。若火源不在當(dāng)前視場(chǎng)內(nèi), 系統(tǒng)將啟動(dòng)自動(dòng)掃描程序, 消防水炮按照設(shè)定的角度和方向進(jìn)行轉(zhuǎn)動(dòng), 直至火源出現(xiàn)在MLX90640的視場(chǎng)內(nèi)。該系統(tǒng)自動(dòng)獲取火源的紅外圖像, 并利用圖像重心算法計(jì)算出火源的重心坐標(biāo)。
以紅外圖像的中心為原點(diǎn)建立坐標(biāo)系, 設(shè)原點(diǎn)坐標(biāo)為(x0, y0), 像素點(diǎn)的坐標(biāo)為P(i, j), 對(duì)應(yīng)的溫度為Tij, 則火源重心在紅外圖像上的坐標(biāo)(xc, yc)如下所示:
根據(jù)火源重心的坐標(biāo)距離圖像中心的偏差(Δx, Δy), 計(jì)算消防水炮需要轉(zhuǎn)動(dòng)的方向和角度。通過轉(zhuǎn)動(dòng)消防水炮, 使火源重心位于紅外圖像的中心, 從而實(shí)現(xiàn)火源的定位。
采用上述方法定位火源時(shí), 首先需要明確消防水炮轉(zhuǎn)動(dòng)角度與紅外圖像像素值之間的對(duì)應(yīng)關(guān)系。消防水炮轉(zhuǎn)動(dòng)角度與紅外圖像像素值的轉(zhuǎn)換系數(shù)可通過以下標(biāo)定算法來計(jì)算。
(1)計(jì)算火源重心在紅外圖像上的位置P(i0, j0);
(2)消防水炮水平方向轉(zhuǎn)動(dòng)一個(gè)角度γ0, 豎直方向轉(zhuǎn)動(dòng)一個(gè)角度δ0;
(3)計(jì)算火源重心在紅外圖像上的位置P(i1, j1);
(4)計(jì)算消防水炮轉(zhuǎn)動(dòng)角度(γ0, δ0)與紅外圖像像素值的轉(zhuǎn)換系數(shù), 如下所示:
式(3)、(4)中, εγ為水平方向上的轉(zhuǎn)換系數(shù);εδ為垂直方向上的轉(zhuǎn)換系數(shù)。
由于消防水炮在工作時(shí)存在較大的外部擾動(dòng), 以及由于傳感器分辨率低及εγ、εδ計(jì)算不精確造成的誤差, 導(dǎo)致整個(gè)控制系統(tǒng)的控制精度受到影響。因此, 單次調(diào)整后的紅外圖像中心與火源重心仍可能存在一定的偏差。為了提高定位精度, 利用調(diào)整后的紅外圖像中心與火源重心的偏差值對(duì)消防水炮進(jìn)行反饋調(diào)節(jié)。
為了減小電機(jī)自身控制精度對(duì)火源定位精度的影響, 根據(jù)紅外圖像中心與火源重心的偏差值來選擇合適的電機(jī)轉(zhuǎn)速, 當(dāng)偏差值較大時(shí)選擇較大的電機(jī)轉(zhuǎn)速, 當(dāng)偏差值較小時(shí)則選擇較小的電機(jī)轉(zhuǎn)速。電機(jī)的轉(zhuǎn)速可通過改變脈沖頻率來調(diào)節(jié), 脈沖頻率越高則電機(jī)轉(zhuǎn)速越高。當(dāng)水平偏差值和垂直偏差值分別為Δx和Δy時(shí), 水平電機(jī)和垂直電機(jī)的脈沖頻率分別為
式(5)、(6)中, Pimax為紅外陣列i方向的最大像素值;fmax為最大脈沖頻率;Pjmax為紅外陣列j方向的最大像素值。
火源定位過程中電機(jī)反饋控制流程如圖1所示。首先計(jì)算火源重心與紅外圖像中心的偏差值, 然后計(jì)算水平電機(jī)和垂直電機(jī)的實(shí)際脈沖頻率fi、fj, 最后轉(zhuǎn)動(dòng)消防水炮, 當(dāng)火源重心與紅外圖像中心的偏差值小于等于ε時(shí), 火源定位完成。
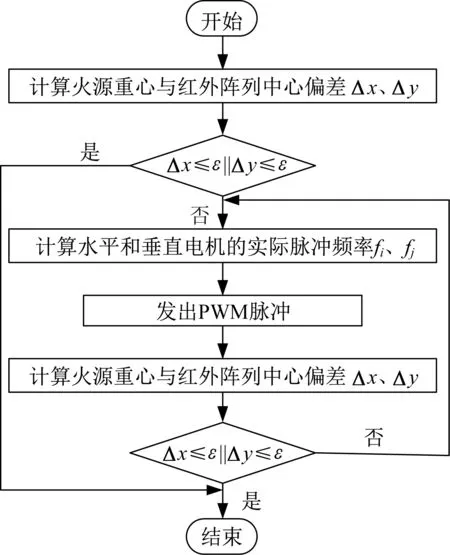
圖1 電機(jī)反饋控制流程圖Fig.1 Flow chart of motor feedback control
2 火源定位方法實(shí)驗(yàn)驗(yàn)證
搭建如圖2所示的實(shí)驗(yàn)平臺(tái)。在測(cè)試之前先對(duì)消防水炮旋轉(zhuǎn)角度與像素坐標(biāo)之間的轉(zhuǎn)換系數(shù)進(jìn)行標(biāo)定。首先通過MLX90640獲取火源的紅外圖像并利用上述的重心算法計(jì)算出火源在紅外圖像中的重心坐標(biāo), 得到火源重心坐標(biāo)值P(i0,j0)為(19.24, 15.39)。然后控制水平電機(jī)與垂直電機(jī)分別調(diào)節(jié)30個(gè)脈沖值, 獲取當(dāng)前視場(chǎng)內(nèi)的火源紅外圖像, 計(jì)算出該圖像中火源重心坐標(biāo)值P(i1,j1)為(27.83, 21.35)。最后計(jì)算出轉(zhuǎn)換系數(shù)。

圖2 消防水炮實(shí)驗(yàn)平臺(tái)Fig.2 Fire water monitor experimental platform
水平方向轉(zhuǎn)換系數(shù)為

垂直方向轉(zhuǎn)換系數(shù)為

標(biāo)定完成后開始對(duì)火源定位算法進(jìn)行測(cè)試。圖3為火源初始紅外圖像, 以圖像的中心為原點(diǎn)建立坐標(biāo)系, 原點(diǎn)坐標(biāo)為(16, 12)。根據(jù)圖像中的火源重心坐標(biāo)值(27.83, 21.35), 計(jì)算出火源重心與紅外圖像中心的水平偏差值和垂直偏差值分別為11.83和9.35, 然后依據(jù)偏差值計(jì)算出水平電機(jī)和垂直電機(jī)所需調(diào)節(jié)的脈沖值。
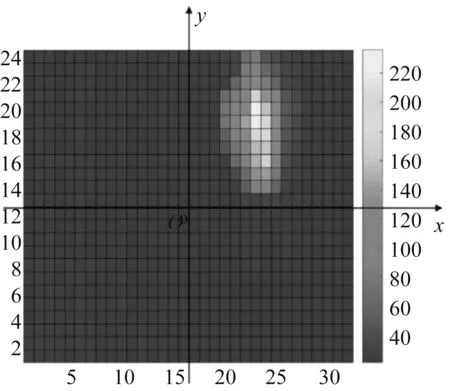
圖3 火源初始紅外圖像Fig.3 Initial infrared image of the fire source
水平電機(jī)調(diào)節(jié)脈沖值為

垂直電機(jī)調(diào)節(jié)脈沖值為

調(diào)整消防水炮對(duì)準(zhǔn)火源, 獲得調(diào)整后的紅外圖像如圖4所示。從圖4中可以看出此時(shí)圖像中心與火源重心仍存在一定的偏差, 經(jīng)計(jì)算可得水平偏差為0.52, 垂直偏差為0.38。
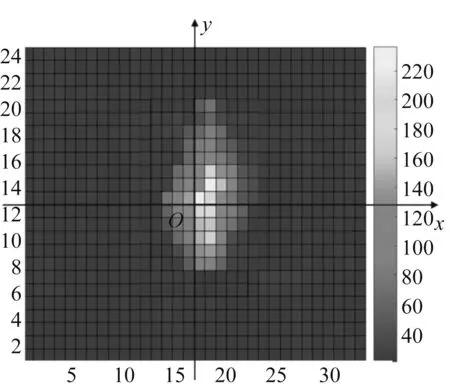
圖4 調(diào)整后的紅外圖像Fig.4 Adjusted infrared image
從上述結(jié)果可以看出單次調(diào)整后的紅外圖像中心與火源重心仍存在一定的偏差。于是采用反饋算法進(jìn)一步調(diào)整消防水炮姿態(tài), 得到如圖5所示的結(jié)果。從圖5中可以看出利用反饋算法調(diào)整后的紅外圖像中心與火源重心的偏差值明顯降低, 達(dá)到了更好的火源定位精度。
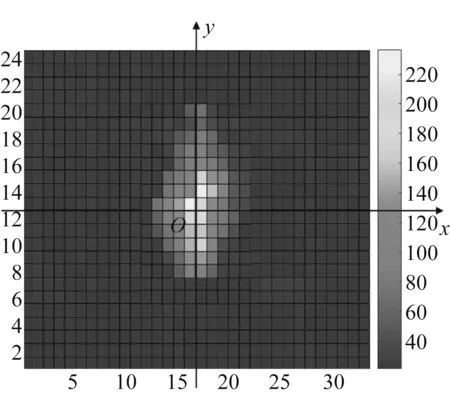
圖5 基于反饋算法的實(shí)驗(yàn)結(jié)果Fig.5 Experimental results based on feedback algorithm
3 結(jié) 語(yǔ)
本文提出了一種基于紅外陣列傳感器的火源探測(cè)及快速定位方法。在探測(cè)到火源的基礎(chǔ)上, 采用紅外熱成像技術(shù)獲取火源的紅外圖像, 在紅外圖像上利用圖像重心算法計(jì)算火源重心坐標(biāo), 并根據(jù)火源重心與圖像中心的偏差對(duì)消防水炮進(jìn)行反饋控制, 實(shí)現(xiàn)火源精確高速定位。實(shí)驗(yàn)結(jié)果表明本文提出的方法可有效提高消防水炮火源定位的效率和精度。該定位方法不僅適用于室內(nèi)大空間消防水炮系統(tǒng), 對(duì)其他的視覺跟蹤應(yīng)用亦具有良好的參考價(jià)值。