基于大型UUV的MPC解耦路徑跟蹤控制
2022-09-26 08:04:46詹康怡馬斌
機電信息 2022年18期
詹康怡 馬斌
(中國艦船研究設計中心,湖北武漢 430064)
0 引言
針對大型UUV的大慣性特性帶來的控制響應較慢、控制效果滯后的現象,運動控制算法的選擇須充分考慮對航行器趨勢的預判與反饋修正,同時必須考慮到艉方向舵和螺旋槳的能力有限,不能頻繁改變作用量。本文針對上述要求設計了控制算法和策略。
本文研究的對象是大型欠驅動對象,模型復雜。考慮到其大慣性的特點,當有較為精確的大型UUV模型時,MPC可以提高控制器對大型UUV未來一段時間內運動趨勢的預測能力。為利用MPC預測控制的優點,并避免MPC在求解大自由度非線性系統時容易發散以及計算量大,不能滿足實時計算的問題,針對大多數航行條件下UUV的水平面和深度面之間的弱耦合關系,將問題解耦為水平面控制與垂直面控制。對于水平面控制,進一步簡化為運動學控制和動力學控制。采用基于視線角的虛擬導引法作為運動學控制器,首先在Serret-Frenet坐標系中進行視線角導航,并根據此導航角度設計控制率,最終控制率作為參考值輸入動力學控制器;動力學控制器運用MPC算法,采用二次規劃方法求得最優解。最后,在Simulink模型中使用S函數將這兩部分結合起來,形成完整的控制器,并設計了仿真試驗,仿真結果證明了該算法的有效性。
1 控制對象模型
考慮到水下無人航行器在大多數工況條件下,水平面與垂直面的運動耦合性不強,為突出體現算法,簡化模型便于研究,本文僅對所控制對象模型的水平面模型進行研究。在僅考慮水平面的運動時可忽略垂蕩、縱傾、橫搖的相關運動學及動力學特性[1],但為展示整體模型,在本節中仍寫出完整模型,而在算法設計章節中分別展示解耦后的模型。完整運動學模型如下[2]:
式中:η為UUV所有狀態量的值所組成的向量;RT(η)為動系到定系的轉換矩陣;v為狀態量的變化速度;MRB(v)∈R6×6為慣性矩陣;CRB(v)∈R6×6為船體科里奧利向心力矩陣;τRB為UUV所受外力及外力矩所組成的向量。
η和v表達式如下:

式中:x,y,z,φ,θ,ψ為狀態量;u,v,w,p,q,r為狀態量的變化量。
RT(η)的表達式如下:
式中:τH表示流體水動力(流體慣性力、流體黏性力);τP表示靜力(重力、浮力);wH表示海洋環境力;τT表示推進器力;τR表示舵力;X∑,Y∑,Z∑為外力;K∑,M∑,N∑為外力的力矩。
MRB的表達式如下:
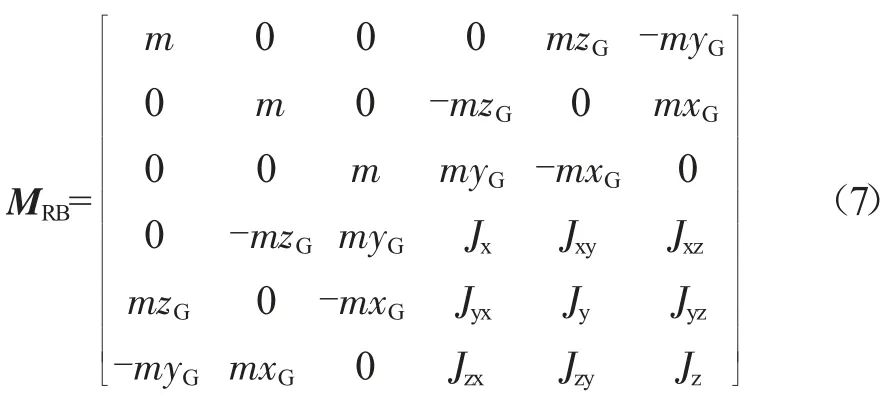
式中:m為UUV的質量;xG,yG,zG為真實位置坐標的向量表達式;J(·)為轉動慣量。
CRB(v)的表達式如下:
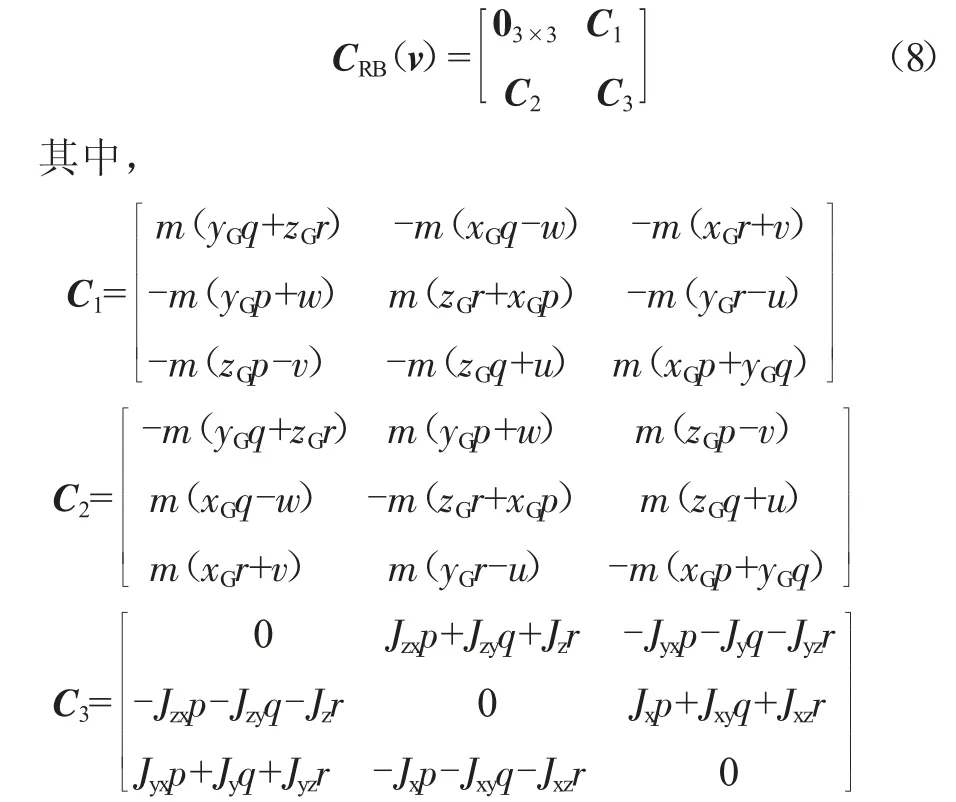
根據所建立的六自由度模型,配合大型UUV水動力系數,得到后續仿真研究所使用的大型UUV數字模型。
2 控制器設計
考慮到在大多數工況下,水下航行器水平面與深度面的控制耦合性不強,針對水平面和深度面可單獨設計控制器,下面僅以水平面為例對本文所設計的方法進行說明。
2.1 控制器架構
本文采用基于LOS的虛擬向導法與模型預測控制相結合,進行水平面控制[3-4]。控制器架構如圖1所示。
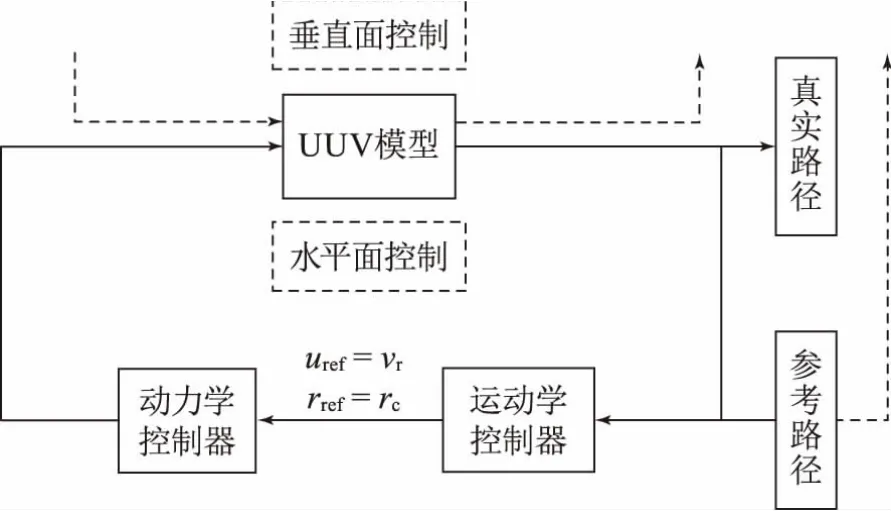
圖1 控制器整體框架
2.2 運動學控制器設計
該部分對解耦后的水平面運動學模型進行控制,在無海流影響下,可得所研究的模型的水平面運動學模型,具體方程如下:
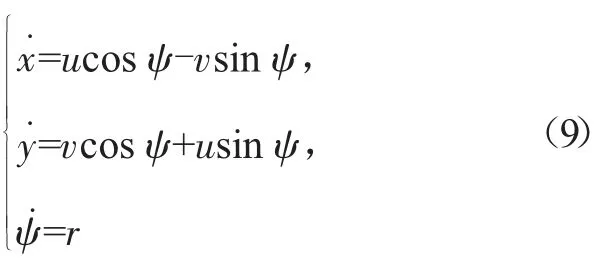
路徑跟隨部分的算法設計分為以下三個步驟:運動學方程轉換、視線角導航、控制率設計。控制率的設計除了x軸方向的參考速度及艏向角的角速度,還增加了一個參考路徑切向速度vr=s˙。相當于在參考路徑上加入了一個虛擬向導,艇的控制中多了一個自由度的控制量。以下是具體的算法設計步驟。
2.2.1 運動學方程轉換
Serret-Frenet坐標系是以參考軌跡上的點為原點,以該點引出軌跡的切向方向為x軸的坐標系,該坐標系的應用可簡化側漂角以及視線角的表達。該坐標系中運動學方程的建立,需要將慣性坐標系中的運動學方程進行轉換,即左乘旋轉矩陣,該旋轉矩陣為慣性坐標系到Serret-Frenet坐標系的矩陣,圖2為模型在Serret-Frenet坐標系中的示意圖。
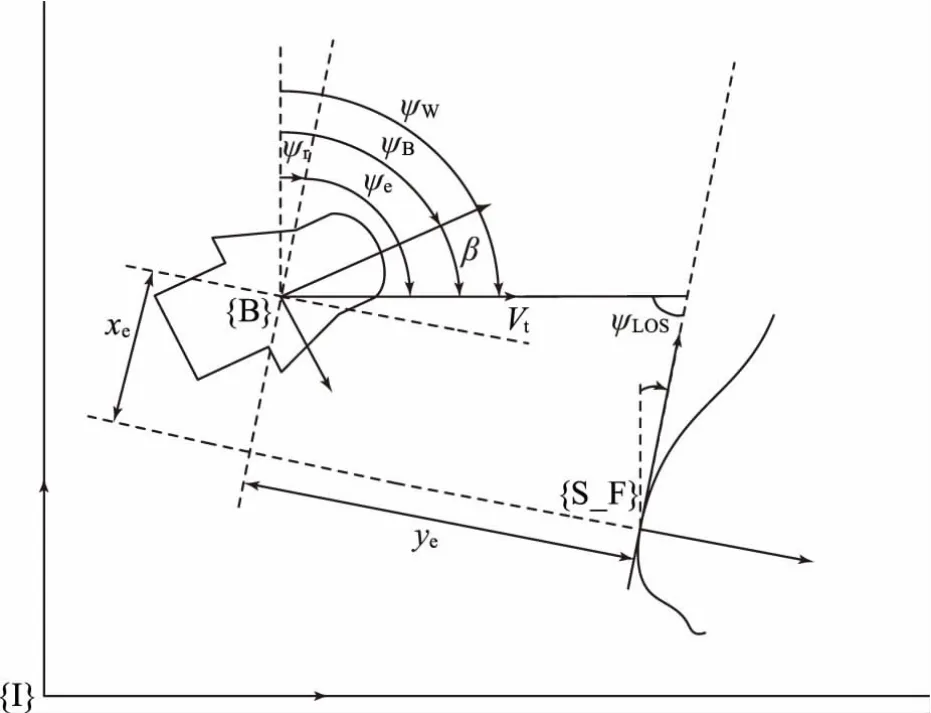
圖2 模型在Serret-Frenet坐標系中的示意圖
得到模型在Serret-Frenet坐標系中的誤差模型表達式如下:

式中:RIBF為簡化模型的轉化矩陣;pr為參考值組成的向量。
式(10)可具體寫成:
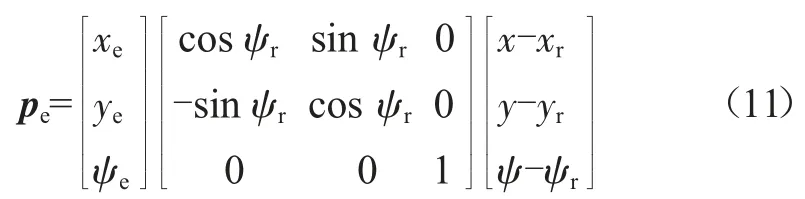
式中:pe為誤差值組成的向量;xe,ye,ψe為誤差值;xr,yr,ψr為參考值。
誤差模型的一階導數可寫成如下公式:
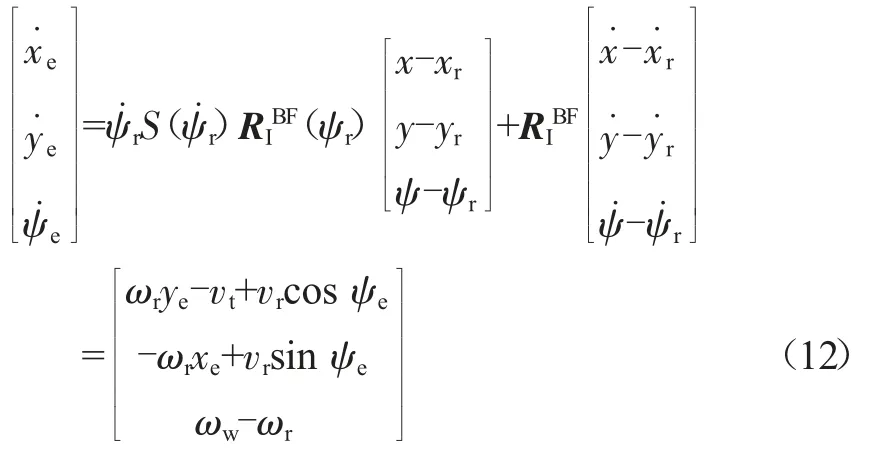
式中:ωr為參考角速度;ωw為實際艏向角速度;vr為UUV橫向速度參考值;vt為合成速度
2.2.2 視線角導航
這部分主要用于計算在Serret-Frenet坐標系中視線角的表達方法,圖3為Serret-Frenet坐標系中視線角的表達。
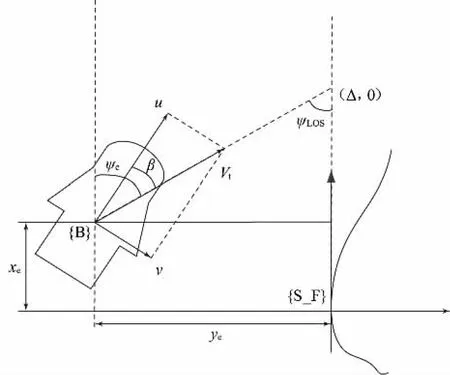
圖3 Serret-Frenet坐標系中視線角的表達
2.2.3 控制率設計
給定參考路徑s以及前向運動速度ud,跟蹤誤差pe=
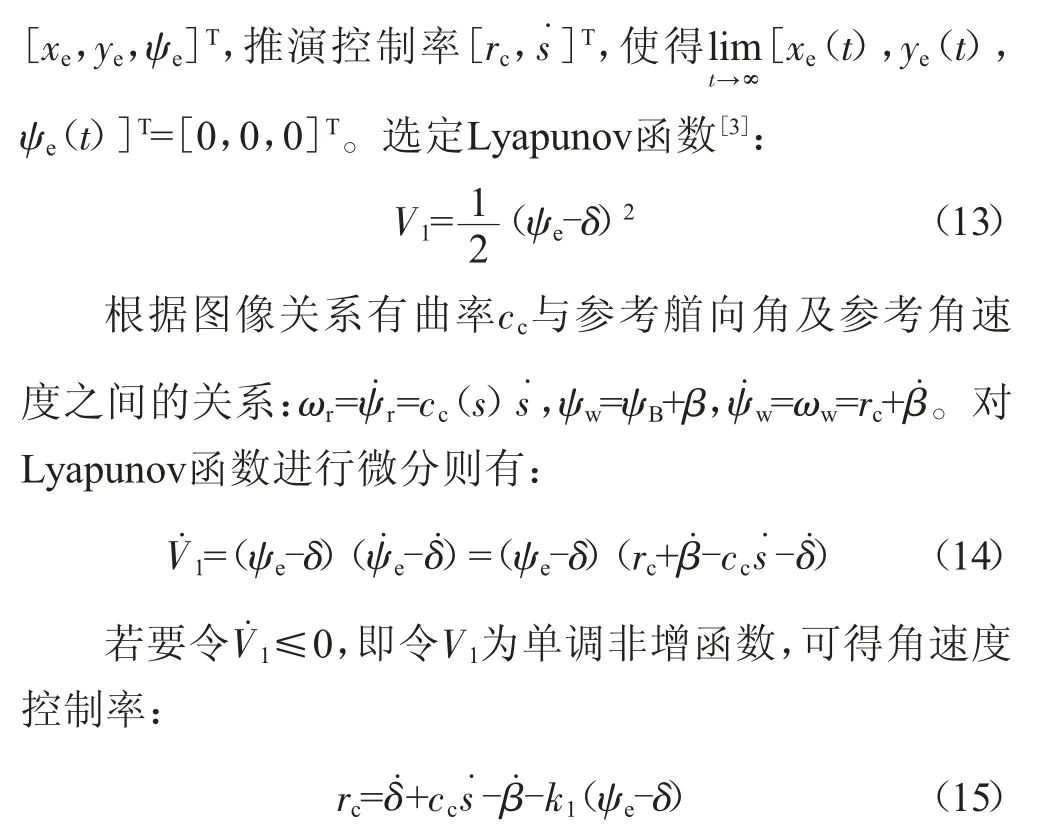
式中:k1為正系數。
再選定另外一個Lyapunov函數:

對該函數進行微分:

式中:ψw為合成速度vt與固定坐標系x軸的夾角;vr為UUV橫向速度參考值。
同理,若要令V˙2≤0,即令V2為單調非增函數,可得速度控制率:

式中:k2為正系數。

綜上,運動學控制率為:
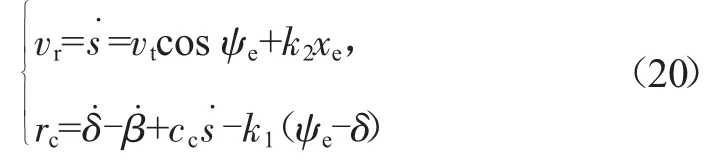
式中:vr為速度控制率,可將其視為路徑上“虛擬向導點”的速度,會根據無人航行器與參考路徑的位置關系即xe的值調整其自身數值大小,以引導無人航行器加速或減速運動。
2.3 動力學控制器設計
航向控制部分運用模型預測算法。對于該部分的控制器設計,需假設在此之前的軌跡跟隨控制器可以實現一個“完美”的跟蹤控制,令uref=vr,rref=rc,即將vr、rc作為參考值輸入航向控制器。
該部分對解耦后的水平面動力學模型進行控制,將水平面動力學方程解耦出來,X2=[u,v,r]T為被控量,U2=[n,dr]T為控制量,有如下形式的動力學關系:
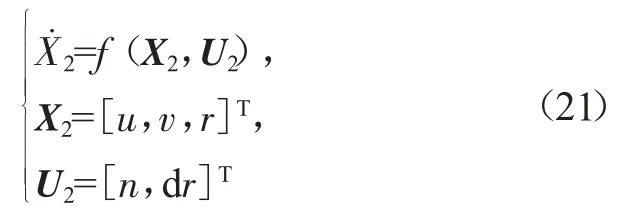
本文運用S-function將控制器與模型建立關系,可隨時間變化不斷將更新的控制量的值送入被控對象模型,同時再把模型的值輸出到控制器,達到迭代更新的效果。
具體的動力學MPC控制器設計如下[4]:
首先對動力學關系式進行泰勒級數展開,忽略高階項只保留一階項,即對非線性模型線性化:

式中:f(Xr,Ur)為參考點處的值,Xr為狀態量參考值,Ur為控制量參考值;X為狀態量實際值;U為控制量實際值。
將上述兩式相減得線性化的誤差模型:
根據線性化的誤差模型公式,運用前向歐拉法進行離散化處理:

式中:A、B為雅克比矩陣。
為便于轉化為標準二次型需要對式(24)進行適應化修改,如下:
經過推導,可得預測的輸出如下:

式中:Y(t)為預測輸出值;ψt、θt為系數及參數組成的矩陣。
接下來進行目標函數的設計,為便于對每個采樣周期里的增量進行控制,在傳統二次規劃函數中添加約束ρε2,可將目標函數寫成如下形式:
式中:Np為預測步長;Nc為控制步長;ΔU為控制量的變化值。
轉換為標準二次型形式如下:

接下來進行約束條件設置,需要考慮的是控制量的表達式與控制增量的表達式,實際情況可以寫成如下形式:
由于目標函數中沒有關于控制量本身的計算,只有關于控制量增量的計算,因此需要將控制量約束轉變成增量的約束,即需要對式(29)進行轉換,因為存在如下關系:

可令:

式中:1Nc為行數是Nc的列向量;?為克羅內克積(Kronecker product)。
綜合上述分析,可將式(29)轉換為如下形式:
本文中設計的約束條件為:

3 仿真驗證
本節針對設計的控制器及特定的大型航行器被控對象,分別設計了正弦曲線及直線為參考路徑進行仿真,以驗證本文算法的有效性。
3.1 正弦曲線
參考軌跡如下,式中β為側漂角,可利用上文中的側漂角計算模塊來計算。
圖4、圖5為具體的正弦路徑跟蹤仿真圖,由圖可知,本文所設計的算法與MPC全控算法都能跟上參考軌跡,但可以觀察到,MPC全控算法的誤差較大,特別是在路徑轉彎處偏離最大,而本文所設計算法誤差更小,且相對于MPC全控算法能較快收斂至參考軌跡;所設計控制器的兩個控制量的變化基本也同狀態量趨勢一致,艉方向舵穩定后呈周期變化,轉速穩定后為定值,而艏向角也能迅速反應并呈周期變化。
圖4 正弦曲線跟蹤效果圖
圖5 本文算法控制量變化曲線
3.2 直線
參考軌跡設定如下,設定一起點不為零的斜線。
圖6、圖7為具體的直線軌跡跟蹤仿真圖,由圖可知,本文所設計的算法與MPC全控算法都能跟上參考軌跡,但可以觀察到,本文所設計算法收斂速度較快,與參考軌跡的誤差較小,而MPC全控算法收斂速度相比較來說更慢,且在初始運動時與參考軌跡偏差較大;所設計控制器的兩個控制量的變化基本也同狀態量趨勢一致,都在穩定后收斂于定值,與參考軌跡相符。
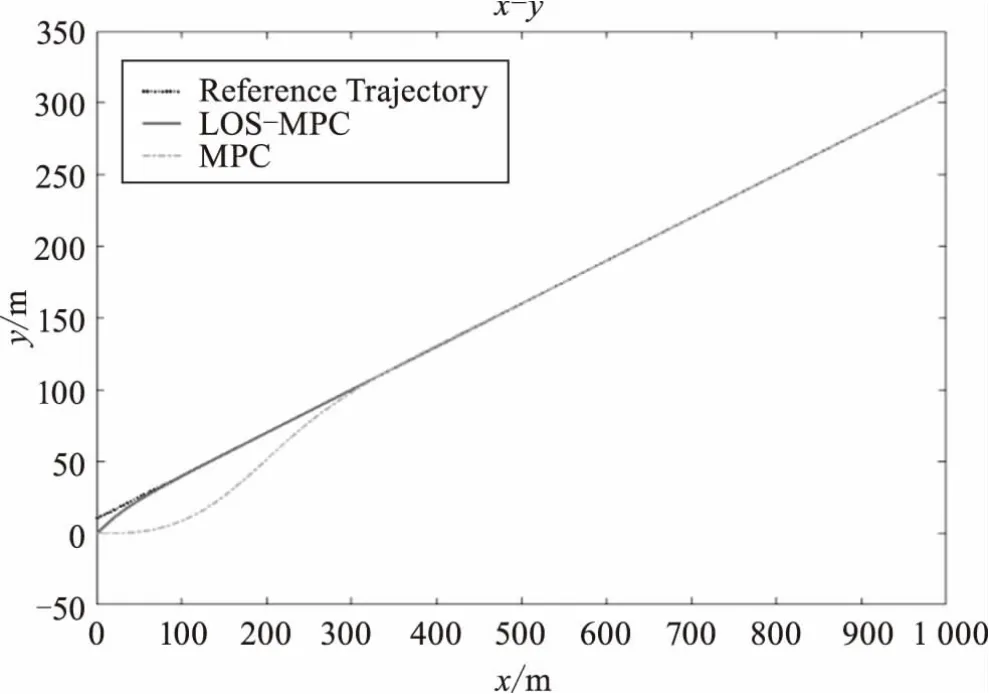
圖6 直線跟蹤效果圖
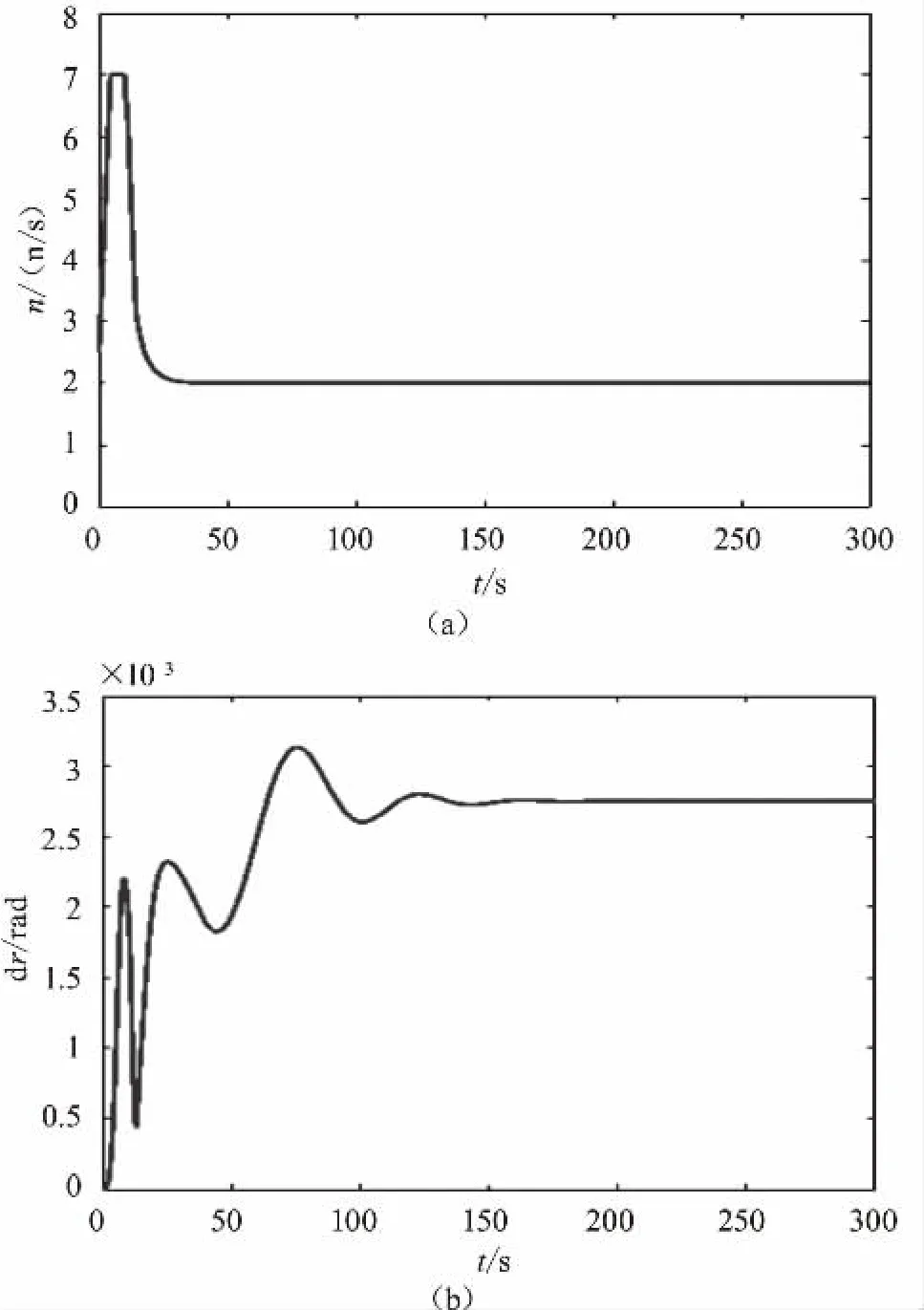
圖7 本文算法控制量變化曲線
下面對比了本文算法與MPC全控算法每輪計算的時間,設計仿真實驗分別統計了兩種算法的計算時間,圖8為具體仿真圖。
由圖8可以發現,本文所設計的算法每輪計算時間平均在0.005 s左右,而MPC每輪計算時間平均在0.015 s左右,由此驗證本文算法在節省計算時間上的確有較明顯的優勢。
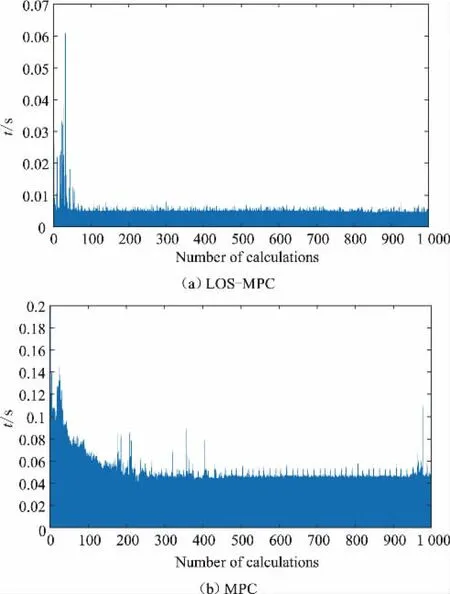
圖8 本文算法與全MPC算法每輪計算時間對比
4 結語
本文針對大型欠驅動UUV設計了一種軌跡跟蹤算法。首先對復雜問題進行分解,在大多數導航條件下只分析水平面。然后,將該問題解耦為運動學控制和動力學控制問題。對于運動學控制器,采用基于在Serret-Frenet坐標系中進行LOS角導航的虛擬制導方法;對于動力學控制器,采用模型預測方法設計水平路徑跟蹤控制器。通過與全MPC的控制效果比較,發現控制效果及計算時間均得到了改善。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03