變電站智能巡檢機器人巡視路線優化
2022-09-26 09:40:22陳行曉陳群鋒
農村電氣化 2022年9期
楊 杰,楊 曦,陳行曉,陳群鋒
(國網浙江省電力有限公司檢修分公司,浙江 杭州 311232)
隨著機器人制造技術的不斷進步與完善,變電站智能巡檢機器人在變電站日常的設備運維管理中發揮的作用越來越顯著。通過對智能巡檢機器人的合理運用,其在變電站運維工作中的應用主要體現在現場設備各類型巡視、設備的紅外測溫及表計數據抄錄、設備現存缺陷隱患的跟蹤等方面[1]。在500 kV變電站無人值守的深入推進的背景下,為更好的對事故應急狀態下變電站電氣設備的運行狀況進行掌控,運用智能巡檢機器人代替運維人員對故障設備進行先期巡檢,將發揮越來越重要的作用。
智能巡檢機器人系統由計算機監控后臺、通信導航系統、充電電源系統、機器人本體等組成,以機器人技術、電力設備非接觸檢測技術、多傳感器融合技術、模式識別技術、導航定位技術以及物聯網技術等各類技術為支撐,能夠以全自主、本地或遠方遙控模式代替或輔助人工進行變電站巡檢,巡檢內容包括設備溫度、儀表等,具有檢測方式多樣化、智能化、巡檢工作標準化、客觀性強等特點。同時,系統集巡視內容、時間、路線、報表管理于一體,實現了巡檢全過程自動管理,并能夠提供數據分析與決策支持[2]。
1 智能巡檢機器人系統現狀分析
目前,變電站的智能巡檢機器人已實現對全站電氣設備的紅外和可見光的覆蓋,通過預設的巡視任務,對全站不同區域電氣設備進行不間斷的周期性的巡檢,而對于新增的有特殊要求的任務,則須要通過人工進行設置。現場實際勘查中,以事故處理時的需求為導向,通過現場的智能巡檢機器人長期以來的運行狀況數據進行分析整合,并結合模擬故障,對智能巡檢機器人在事故處理時的運行狀況進行檢驗,得出智能巡檢機器人在對設備進行巡視時,按照預定設置的路線,遵循設備間隔順序依次對各設備進行巡檢,若事故處理時,須對特定間隔的特定設備進行快速檢查,但智能巡檢機器人的行進路線并未按照最短路線進行,而是從外圍繞了一圈,這樣就無法滿足事故應急時的快速響應。
2 智能巡檢機器人路線的改進
無人值守變電站內發生電氣設備異常及故障等情況時,由于現場沒有運維人員在第一時間去現場獲取故障設備信息,主站除了通過監控后臺、工業視頻等設備及時了解相關信息,也須通過現場的智能巡檢機器人對故障設備進行更進一步的全面觀測。
在事故應急處理狀態下,須現場的智能巡檢機器人能夠快速高效的到達故障設備所在位置,并獲取現場故障設備的關鍵信息。目前,變電站內的智能巡檢機器人采用感應激光點位的方式進行定位巡檢,智能巡檢機器人沿著事先規劃設置的路徑對設備展開巡視檢查。變電站現場激光點位的設置基本上是按照日常巡視的行進路線進行鋪設,通過觀察機器人對不同區域設備的巡視情況,發現智能巡檢機器人存在著巡視路線不夠合理及繞道等現象,在事故應急過程中,就無法快速到達某些故障設備所在位置,進行現場設備運行狀況的信息采集。
智能巡檢機器人在對變電站現場電氣設備進行巡視檢查時,能否順利到達目標設備,其導航系統在其中扮演了非常重要的角色。導航系統引導智能巡檢機器人到達目標設備,依靠的是場地中巡檢線路上鋪設的激光點位,智能巡檢機器人通過其底盤上安裝的傳感器來接收巡檢線路上的激光點位信息,以此來引導機器人按照相應的巡檢路線到達目標設備所在位置[3]。因此,裝有激光點位的巡檢路線的位置布局如何確定,也將最終影響智能巡檢機器人的路線選擇及事故應急時的處理效率。
對于500 kV 變電站常規的AIS 設備,其設備區域的分布特點一般包括500 kV設備區、220 kV設備區、主變及35 kV 設備區,智能巡檢機器人則根據巡檢線路上的激光點位對上述區域展開巡視。依據站內設備布局及智能巡檢機器人的導航方式特點,采用幾何模型進行環境建模[4],將500 kV 變電站內設備環境抽象化為智能巡檢機器人的導航軌跡模型,其典型的軌跡模型如圖1所示。
如圖1 所示模型可知,按照目前的巡視軌跡,能夠滿足智能巡檢機器人對站內電氣設備各個巡視點的覆蓋。智能巡檢機器人按照設定好的的巡視路線對各個間隔設備依次開展巡檢和紅外測溫等工作。

圖1 典型巡視軌跡模型圖
當現場電氣設備發生故障或異常情況時,此時主站須無人值守變電站內的智能巡檢機器人立即啟動應急任務對現場故障設備進行巡檢,由于發生故障或異常的設備存在著隨機性,假設機器人在圖1中的1 號點位,故障或異常設備在220 kV 設備區的2號點位,由圖1的機器人導航軌跡圖可知,智能巡檢機器人行進的最近距離路線是經3 號點位一側到達目標設備,由此可知,此段路線從220 kV設備區一側繞了一段路,并非最優路線,在事故應急時,影響了智能巡檢機器人到達故障設備的時間。
通過對變電站電氣設備所處位置的現場運行環境進行勘察分析,并結合智能巡檢機器人本體的底盤驅動結構特點及其直行轉彎時對周邊空間的要求,發現可以充分利用變電站現場的電纜蓋板及在符合安全及機器人運行條件的位置增設相應巡視路線,以此來擴展智能巡檢機器人巡視軌跡的多樣性和可選擇性。
變電站現場的電氣設備的位置布局比較復雜,而在變電站設計之初,就預留了相應充足的空間給電纜進行布設,因此電纜蓋板所在的路線上基本能夠躲開設備障礙物,符合作為機器人巡視路線選項的條件。
在對變電站現場地理環境及設備布局特點進行深入調查分析后,選取合適的電纜蓋板所在通道或新增部分通道作為智能機器人巡檢線路的補充,可以有效完善機器人的導航軌跡,提高機器人的巡檢效率。現場電纜蓋板設計時一般高于路面水平位置,須在電纜蓋板與巡視路面之間鋪設適合機器人行進的斜坡路。在充分合理利用現場電纜蓋板通道及新增部分通道的基礎上,可將智能機器人的典型巡視導航軌跡模型優化為圖2所示。
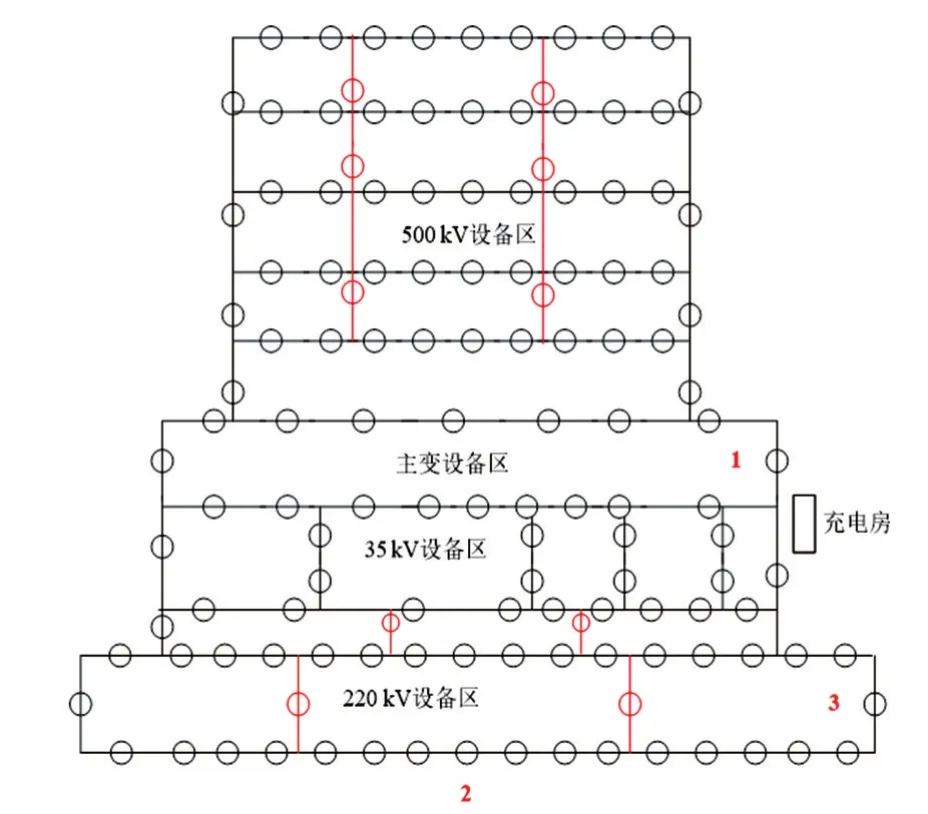
圖2 改進后典型巡視軌跡模型示意圖
由圖2 可知,當智能機器人在充電房中待命或在執行巡檢任務中接收到事故應急響應任務命令時,由于可供選擇的路徑增多,經過設定好的路線規劃方法計算,靈活選擇就近巡視軌跡對目標設備進行巡檢,可有效提高事故應急響應速度。
若能再變電站設計之初,通過統籌協調規劃,引入道路交通路線規劃的可行理念,提前規劃預留智能機器人的巡視路線,可有效提高智能機器人巡視路線的合理性和實用性。
3 結束語
鑒于智能巡檢機器人在變電站實際使用過程中,在執行任務過程中的路徑選擇存在不足,不能實現快速的響應。本文在充分分析產生的原因以及現場實際勘察基礎上,充分利用變電站內的電纜蓋板或增加輔助道路等形式,豐富機器人的路線選擇,當機器人處在靜止或運動過程中接到應急指令時,能夠快速找到就近路線,采用合適的算法進行路線規劃,提高了到達目標設備的實效性。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
汽車維護與修理(2016年10期)2016-07-10 08:17:41
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
河南電力(2015年5期)2015-06-08 06:01:45
