敵我識別系統對空管監視的需求分析
2022-09-26 04:17:52曾湘洪茍玉玲
數字技術與應用 2022年9期
關鍵詞:信息
曾湘洪 茍玉玲
1.四川九洲空管科技有限責任公司;2.四川九洲電器集團有限責任公司
多傳感器信息融合是敵我識別系統對民用或中立目標進行有效識別的手段,其中空管監視的信息是最重要的輔助信息。本文重點對空管協作監視的優點、限制條件和在敵我識別系統中應用需求進行梳理和分析,并對應用前景進行展望。
1 多屬性識別需求
根據航空數據顯示,由于敵我識別系統未能有效識別到民用飛機,現今為止被誤攻擊而造成的損失及人員傷亡數據巨大[1],這不僅會產生嚴重的人道危機,改變民意和輿論走勢,引發事態發生逆轉,甚至影響當時的政治格局。這使得在局部沖突、熱點區域、敏感空域內,通過多傳感器信息融合來判辨中立或民用目標變得極為迫切。尤其是在沒有完善空管空防一體化系統支撐的獨立系統,以及較易在陌生地域、突發空情或敵方人為干擾等情況下造成裝備操作人員的誤判。
2 敵我識別簡介
民用二次監視雷達(SSR)起源于西方體制敵我識別(IFF),其中民用模式A與軍用模式3具有完全相同的特點,通常稱作3/A模式[2]。美國研制的模式5雖然采用了先進MSK調制技術、擴頻技術、數據鏈路傳輸技術、計算機現代加密技術等,但詢問載頻為1030MHz,應答載頻為1090MHz,仍與空管監視使用相同頻段,兼容二次監視雷達功能(如表1所示);而以俄羅斯為代表的東方體制敵我識別器需根據不同的識別路線和工作狀態使用不同的波段或波段組合,除非特殊要求,一般不兼容空管二次監視雷達(SSR)功能。這使得繼承前蘇聯制式的武器控制雷達對民航目標探測識別具有先天不足;同時在沖突地區的敵我識別設備一般處于無線電靜默狀態,也會對突發的空情屬性進行誤判。
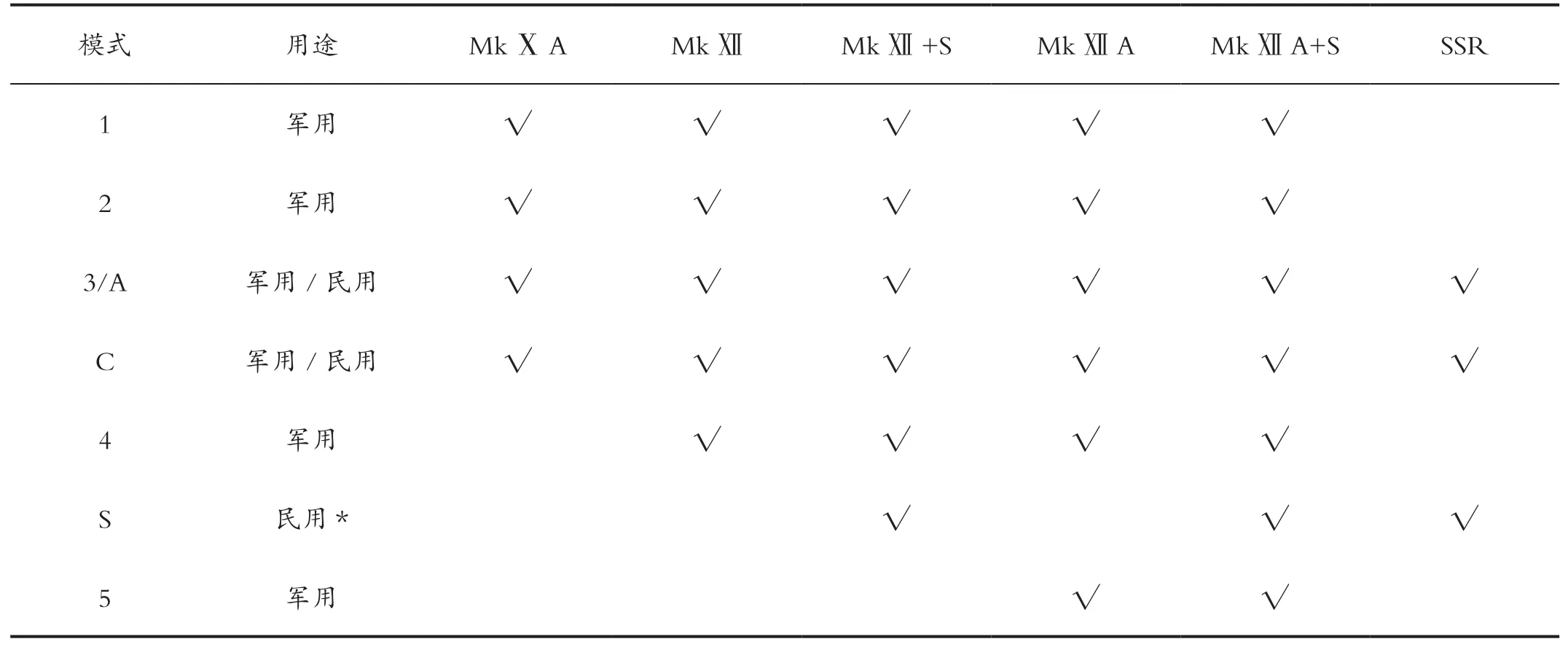
表1 主要西方體制敵我識別器模式對比Tab.1 Comparison of main western IFF modes
3 空管主要監視技術
用于民航的空中交通管制(ATC)監視技術手段較多,一般可分獨立監視和協作式監視。獨立監視通常也稱為非協作式監視,一般是指地面設備不依賴空中目標發送的信息進行自主監視,如:航管一次雷達[3]。本文主要對空管的協作式監視在敵我識別中的應用進行討論,空管協作式監視主要通過如圖1所示獲取民航目標的信息。
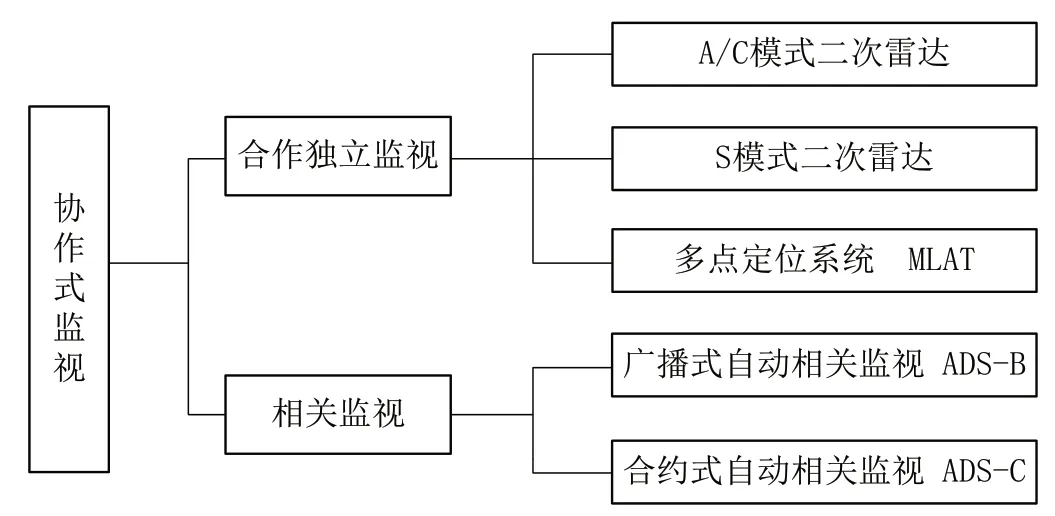
圖1 空管協作式監視主要手段Fig.1 Main means of ATC cooperative surveillance
4 空管協作式監視特點
由于A/C模式、S模式已在西方體制敵我識別器中普遍采用,而ADS-C采用點對點的通訊方式,需航空器直接與管制單位之間建立點到點的通訊連接,一般在其他監視手段不可行的區域提供監視,本文不對上述監視模式或手段進行累述。
ADS-B由機載星基導航和定位系統生成精確的航空器及其他移動目標自身定位信息,通過特定數據鏈和格式進行周期性自動監視信息廣播,并由特定地面站設備和(或)其他航空器進行接收和處理,以實現監視功能[3]。ICAO推薦使用的1090ES數據鏈主要利用S模式的DF17和DF18進行信息傳輸。可以實時獲取目標的主要廣播信息,包括飛機標識、飛機類別、三維位置、三維速度等狀態信息,以及緊急狀態、航跡角、航跡拐點等附加信息[4]。消息廣播間隔時間為0.4~0.6s之間。
MLAT采用到達時間差定位技術,通過測量、處理目標應答信號(A/C/S/1090ES/TCAS等)到達多個基站的時間差來實現目標定位,滿足管制監視需求[3]。分為機場場面多點定位(ASM)系統和廣域多點定位(WAM)系統,對航路目標監視采用廣域多點定位系統。可以獲取飛機的高度、速度等識別信息,同時可以人工設置上報信息的刷新速率[5],一般每秒數據更新一次。
雖然ADS-B和MLAT目標信息刷新率高,目標信息豐富完整,但其探測范圍受視距和地形地物等因素限制。地形地物對無線電信號的反射和遮擋,會直接影響其覆蓋能力,同時MLAT還會受地面站的布局影響。為最大限度的發揮其性能,對場地設置及環境都有明確的要求:ADS-B地面站應滿足空域覆蓋、設在開闊地帶,四周無嚴重的地形地物遮擋,同時還要考慮測試信標和合裝設備間電磁影響;MLAT地面站除需滿足對監視區域的精度和覆蓋要求,作用區域內應無嚴重的地形地物遮擋,同時還要考慮詢問區域覆蓋、接收機間同步和合裝設備間電磁影響[6]。以上這些要求限制了兩者在極端環境下的應用,降低系統性能的正常發揮。
5 空管監視在敵我識別中的應用
由于現代戰爭具有突發性、力量非對稱性、任務多樣性等新特點,無法有效依托各國完整的空防空管一體化系統[7],必須依靠裝備自身的偵察監視手段,采用成熟可靠的數據源對目標進行精準識別,適時處置各種空情。敵我識別裝備可配合一次雷達進行可疑目標的屬性識別,與空管監視的目的要求有顯著區別,需對空管監視手段進行優化整合后才能更好的服務于目標識別。
敵我識別器為軍用裝備,對“五性”設計有明確要求。可通過借用空管成熟監視技術和體系,增加軍用監視的成熟度;優化功能(對與目標識別無關的功能進行裁剪),簡化設計,減少器件和組件等數量,降低功耗;采用優化系統架構對L波段進行綜合一體化設計,利用數字化處理技術進行硬件復用,提升設備擴展和升級能力;同時采用人機工程、優化人機交互界面,提高裝備的用戶操作維護體驗。
為提高裝備的生存能力,電磁兼容、抗干擾和反偵收能力也有特殊要求,首先盡量少輻射或不輻射電磁信號,在源頭上減少被偵收的概率,堅持非必要不詢問原則。為降低對電磁環境的額外干擾和被偵收打擊的可能性,地面ADS-B站需采用ADS-B IN工作方式,MLAT需配置為無源系統來提供增強空管監視功能;其次對A/C模式、S模式可采用敵我識別系統常用的牽引工作方式,僅對特定方位的特定目標進行有限的突發詢問,一旦有效識別目標隨即進入靜默狀態。
MLAT對欺騙干擾和飽和攻擊具有很強的抑制能力,同時兼容A/C模式、S模式,并與ADS-B技術相兼容,通過針對性的接收頻段和功能擴展,可對M4、M5和東方體制的應答信號進行無源定位。
敵我識別系統和空管監視系統的數據融合,可獲取相關目標更豐富的特征信息[8],確保做出更優的判決處理,進一步增強目標屬性的識別力,達到裝備高可靠性、信息高置信度、系統高可用度的要求。目標屬性與監視模式對照如表2所示。
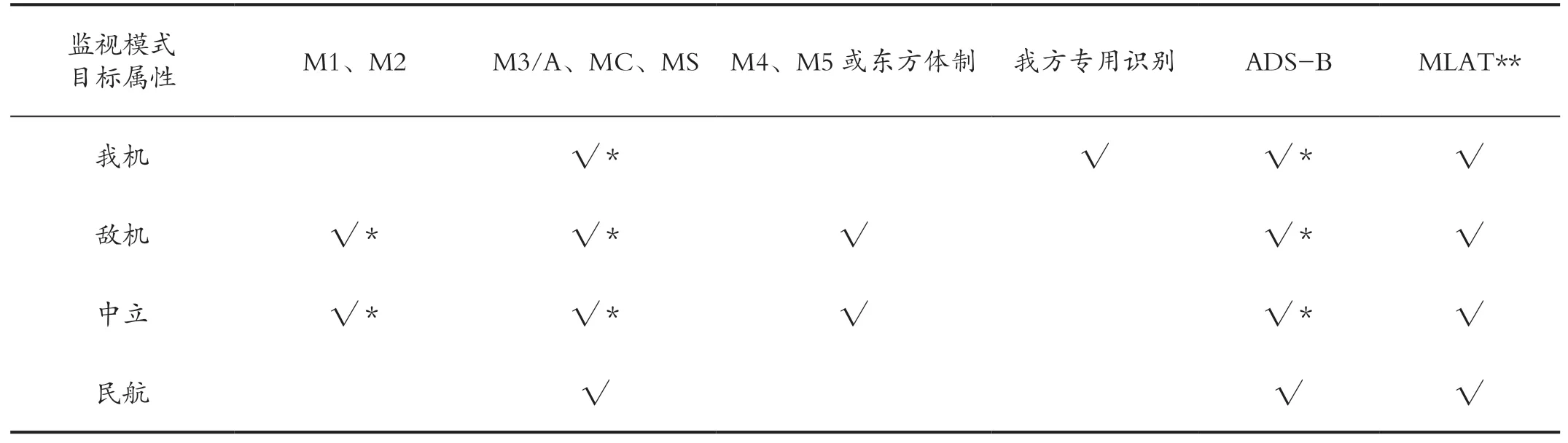
表2 目標屬性與監視模式對照表Tab.2 Comparison between target attribute and surveillance mode
6 結語
空管協作式監視是敵我識別的有力補充,不僅減少由于誤識別導致的對民用或中立目標的誤傷,同時也極大地提高了敵我識別的準確性。但空管監視站點的架設對陣地有較高要求,一般機動裝備由于地形和隱蔽需要很難全面達到架設要求,在一定程度上限制了設備性能的充分發揮。如針對具體關注目標和區域適當調整陣地,就能發揮較高效能,其提供的無源、連續和實時的空中交通態勢感知能力,可對敵我識別系統識別能力進行必要的補充。具有空管協作式監視能力的敵我識別系統,能進行多傳感器信息融合,更好地提供空中目標監視識別、實時動態空情掌握,保證空中交通順暢有序,有效提升防空作戰快速反應能力。該系統將在使用中不斷改進完善,具有更強的生命力,更廣闊的應用場景。
引用
[1] 魏岳江.如何識別民用與軍用航空目標[J].江蘇航空,2014(4): 45-47.
[2] 張尉.二次雷達原理[M].北京:國防工業出版社,2007.
[3] 張召悅.空管監視技術[M].北京:國防工業出版社,2017.
[4] MH/T 4036:1090MHz擴展電文廣播式自動相關監視地面站(接收)設備技術要求[S].2012.
[5] MH/T 4037.2:多點定位系統通用技術要求 第2部分:廣域多點定位系統[S].2017.
[6] MH/T 4003.2:民用航空通信導航監視臺(站)設置場地規范 第1部分:監視[S].2014.
[7] 程季锃,程健,何福京.空防空管一體化運行體系能力需求分析[J].中國民航飛行學院學報,2012(7):15-18+22.
[8] 曹曉蓓.綜合敵我識別方法研究[J].電訊技術,2011,51(12):1-3.
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
