帶式輸送機糾偏裝置的設計及模擬應用
2022-09-25 03:56:52王曉梅
機械管理開發
2022年8期
王曉梅
(山西潞安郭莊煤業公司,山西 長治 046100)
引言
帶式輸送機作為一種連續運輸設備,不僅可以輸送煤炭、礦石等散裝物料,還可以輸送整體物料[1],具有結構簡單、輸送量大且運輸距離長、輸送物料種類多、適應性強[2]等優點。目前,隨著帶式輸送機運行速度、輸送距離、負載的持續增加,導致輸送帶跑偏的現象越來越明顯,而輸送帶跑偏指的是輸送帶位于帶長方向的中心線與輸送機機架中心線偏離的現象,且跑偏現象已經成為帶式輸送機運行中最頻繁發生的現象[3]。而引起帶式輸送機跑偏問題的原因主要有:一是設計制造導致的跑偏,如設計中存在的問題、設計質量缺陷、托輥質量問題、滾筒質量問題等;二是安裝不當導致的跑偏,如機架安裝不正、滾筒軸線偏斜、托輥軸線偏斜、導料槽兩側的壓力不等[4];三是運行問題導致的跑偏,如托輥或者滾筒外表面黏料、輸送帶松弛、落料位置不居中、輸送機振動以及托輥損壞[5]等。針對輸送機的跑偏現象,本文設計出一套輸送帶自動糾偏裝置,可有效對輸送帶進行糾偏,進而實現煤礦安全高效的生產。
1 帶式輸送機糾偏裝置的設計
依據帶式輸送機的運行工況,本文對輸送機自動糾偏裝置進行設計,其中,輸送機糾偏裝置示意圖如圖1 所示。
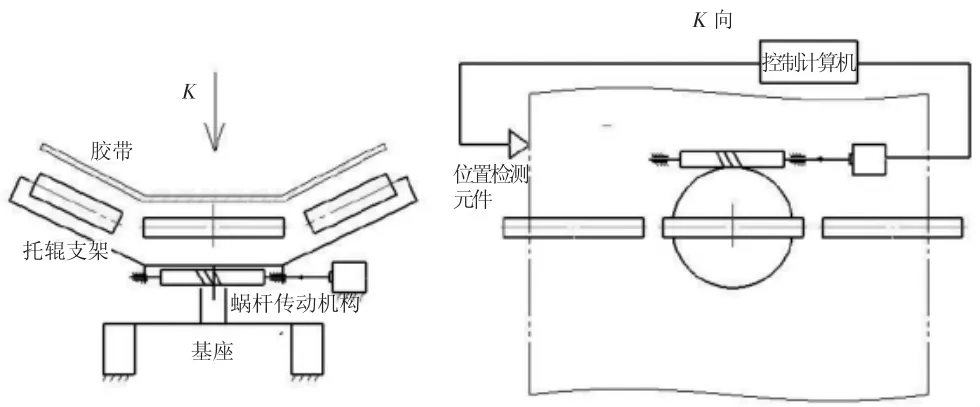
圖1 帶式輸送機糾偏裝置示意圖
本文設計的糾偏裝置系統原理為:帶式輸送機橫向位置通過采用紅外距離檢測傳感器跑偏量檢測裝置完成數據的檢……
登錄APP查看全文
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
