基于PI算法的雙向DC-DC轉換器電感電流控制與仿真
2022-09-23 11:48:14張文正袁海娣
江蘇理工學院學報 2022年4期
關鍵詞:信號
張文正,袁海娣
(安徽三聯學院 基礎實驗教學中心,安徽 合肥 230601)
目前,電動汽車(EV)常使用兩種不同的電源系統:用于牽引電動汽車的高壓電池(200~450 VDC)和用于為電動汽車中所有電器供電的低壓電池(12 V)。以往的低壓電池多使用交流發電機充電,能量單向傳遞,這無疑更多地消耗了能源[1-5]。目前,低壓電池通過高壓電池組進行充電,而在某些特定情況下(如電動汽車啟動),則需要低壓電池為高壓電池組充電,以使車輛獲得更多的能量[6-9]。因此,為了運行復雜的控制算法,實現高效節能,車載DC-DC轉換器需具有極高效率的雙向能量傳遞和高可靠性功能[10-14]。Wang[15]設計了一種用于電動汽車的DC/DC轉換器,采用移相全橋控制策略和小信號分析方法對DC/DC控制器的動態模型進行研究,通過仿真分析了變壓器的零電壓特性和功率損耗,結果表明了模型和方法的有效性,為本文非隔離DC-DC轉換器設計提供了參考。
由于采用PID(Proportion-Integral-Derivative)閉環控制方法配合脈沖寬度調制(PWM,Pulse Width Modulation)能夠實現某些物理量的升降控制,如電路中電壓、電流等;因此,國內外學者對PWM控制策略的研究較多。若將電流描述為一個階躍激勵信號,在控制電流差值較大時,讓某個電子器件突然變化到某個電流值是不合理的,這時需對激勵信號進行平滑過渡控制。在工程上,迅速而準確地獲得信號的速度具有一定的挑戰性,同時由于被控對象往往具有慣性,當初始誤差較大時會增大系統的增益,產生較大的超調;因此,在控制系統中,常采用一些微分跟蹤器實現對信號速度的預測和降低超調、振蕩、慣性突變等。Levant微分器是一種基于滑膜技術的非線性微分器[16-18],它具有良好的低頻跟蹤效果,并具有一定的噪聲抑制能力,在工程控制中常被用于伺服電機控制、電液伺服控制等。本文將采用Levant微分器實現方波類型信號的平滑過渡控制。
為控制車載低壓電器供電電池雙向DC-DC轉換器的電感器電流,本文精確調整PWM波占空比,實現高低壓電池雙向能源流動,采用非隔離DC-DC轉換器,以其電感器上導通電流作為PWM控制對象;建立基于Levant微分器的信號處理模型,對高壓輸入電流進行微分過渡控制;在MATLAB Simulink仿真環境中搭建基于PI算法的PWM電流控制模塊、雙向DC-DC轉換器模塊、控制器驅動的雙向DC-DC升壓和降壓穩壓器等;通過仿真試湊方法獲得具有較高控制精度的PI參數;得出二極管控制電流和低壓電池組電壓變化曲線,以驗證模型的能量雙向傳遞性能和輸入信號的平滑過渡情況。
1 控制系統模型
1.1 PID控制器
PID控制器是工程中常用的控制策略之一,因其具有算法簡單、可靠性高等特點,而被廣泛應用于運動控制、過程控制(如溫度控制系統、機器人控制系統)中。隨著計算機技術的發展,通過編寫計算機軟件實現數字式PID控制器的應用越來越廣泛。PID控制器是一種線性控制器,它根據給定值yd(t)和實際輸出值y(t)構成控制誤差:

工程中常采用微控制器方式對PID算法進行數字控制,以采樣點時刻kT為時間變量t,可得PID算法的離散形式為:

式中:ki=kp/TI;kd=kpTD;kp、ki、kd分別為比例系數、積分系數,微分系數;T為采樣周期;k為采樣點序號,k=1,2,…;e(k)和e(k-1)分別為第k和個時刻所得的偏差信號。
實踐表明,轉換器模型響應速度較快,并非大滯后環節。為了能夠對高壓電池組輸入的電流信號快速響應,同時降低控制系統的靜偏差,消除滯后效應,可去除PID控制器中的微分環節,不反應偏差信號的變化速率,采用PI控制器對DC-DC轉換器的電感器電流進行控制,以兼顧控制的快速性,減小或消除靜差。
1.2 PWM控制原理
PWM是一種波形幅寬控制算法,其廣泛應用于控制、測量、通信等多種領域。PWM幅寬控制可描述為如圖1所示的波形圖。
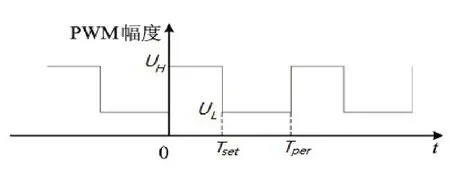
圖1 PWM脈寬調制圖
PWM波的輸出電壓為:

式中:UH為PWM高電平電壓值;UL為PWM低電平電壓值;Tset為PWM高電平時間;Tper為PWM的周期;k為PWM周期次數。
可得PWM波輸出電壓的平均值為:

式中,系數α為PWM波形的占空比。
1.3 非隔離雙向DC-DC轉換器
如圖2所示,非隔離雙向DC-DC轉換器拓撲結構包括:兩個電容器C1和C2;兩個開關設備S1和S2,每個開關設備集成一個保護二極管,集成二極管通過提供反向電流的傳導路徑來保護半導體器件,當半導體器件突然關閉負載的電壓供應時,感性負載產生高反向電壓尖峰;一個電感器L。1+為與第一直流電壓的正端關聯的正直流電壓端口;1-為與第一直流電壓的負端關聯的負直流電壓端口;2+為與第二直流電壓的正端關聯的正直流電壓端口;2-為與第二直流電壓的負端相關的負直流電壓端口。1+和1-分別連接至具有固定電壓值的直流電源正極和負極;2+和2-分別連接12 V低壓電池的正極和負極。
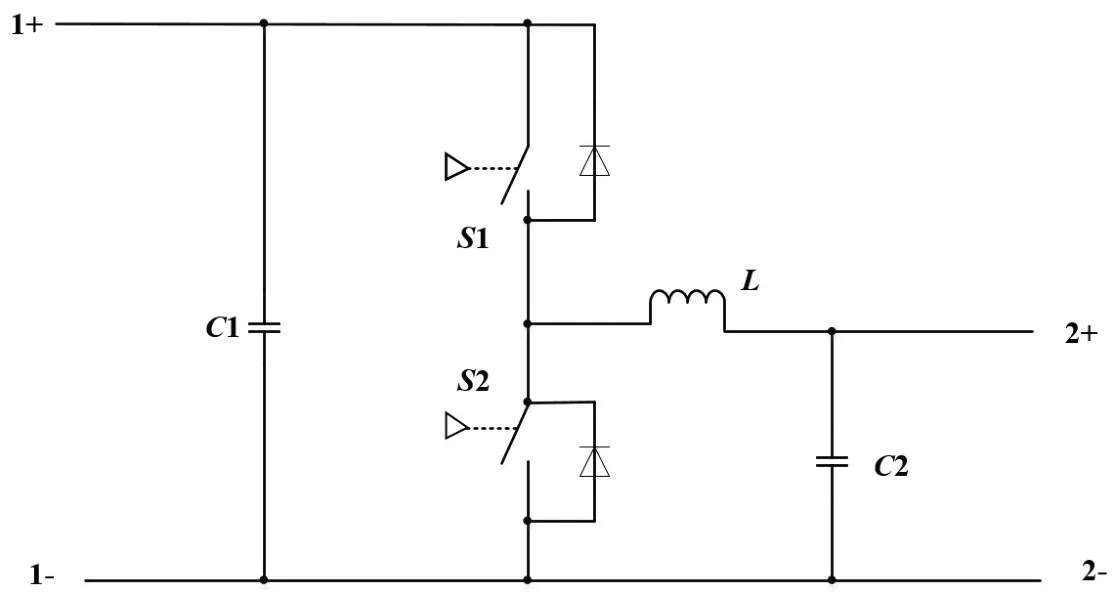
圖2 非隔離雙向DC-DC轉換器
1.4 Levant微分過渡算法模型
控制系統中需注意對信號既要能夠精準求微分,又要具有一定的噪聲過濾魯棒性。Levant提出了一種基于滑膜變結構控制技術的微分過渡非線性控制器,其微分器表達式為:
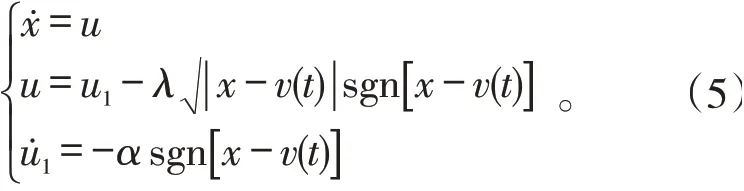
式中:x為控制器狀態變量;u為控制輸入;u1為信號速度跟蹤變量;v(t)為輸入信號;α和λ為控制器調整系數;sgn為符號函數。
式中的控制器系數為:
在MATLAB仿真環境中設計一個近似方波函數為:

設計一個干擾信號源:

式中,rands(1)為產生-1~1的隨機數。
如圖3所示,為所得到的期望的近似方波信號與加入噪聲后的信號。由圖3可知,近似方波信號加入噪聲信號后呈明顯的不規則變化,近似方波信號幅值為+8和-8處鋸齒現象明顯。
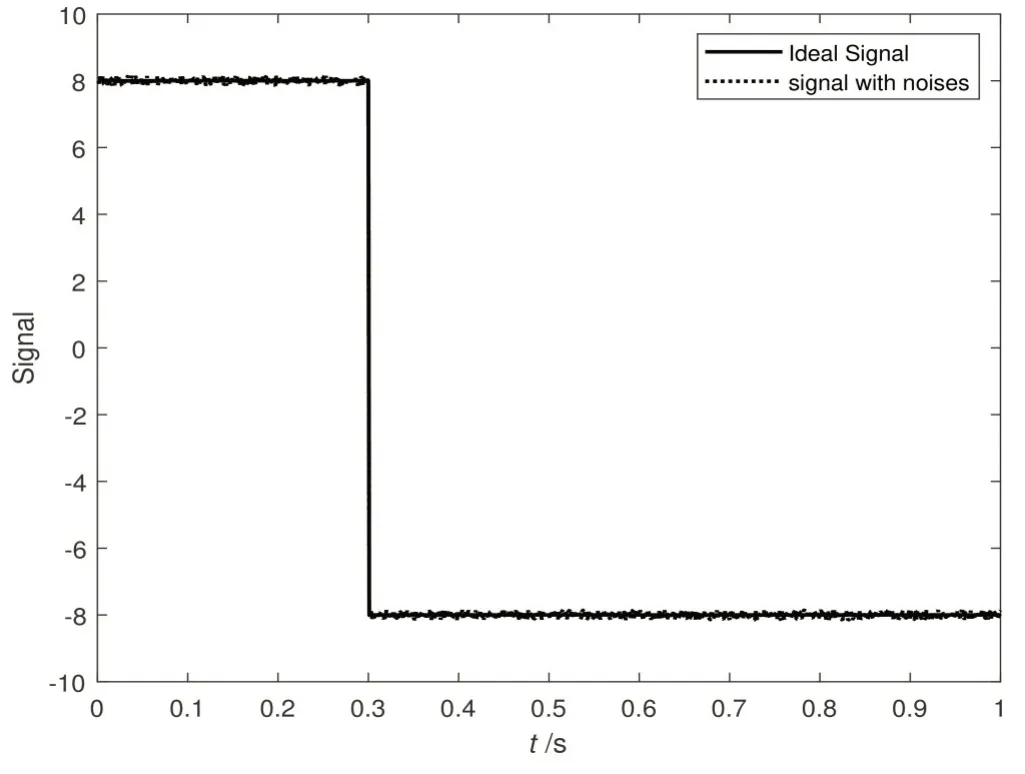
圖3 期望信號與噪聲信號
通過調整控制器系數α和λ來實現近似方波信號的平滑過渡,對幅值如式(7)的近似方波信號,調整控制器變量α和λ為(20,10)(40,20)(60,50)(80,60)(140,110)(200,190),設計過渡信號控制時間為0.05 s左右,在MATLAB中進行總時間1 s的仿真計算。如圖4所示,為得到的近似方波期望信號和經算法計算后的過渡信號。從圖4可以看出:當α=200和λ=190時滿足控制要求;同時,Levant微分控制過渡算法的采用,使控制信號由加速度無限大變化的近似方波信號變為可平滑變化的過渡信號,從而有益于改善控制系統。
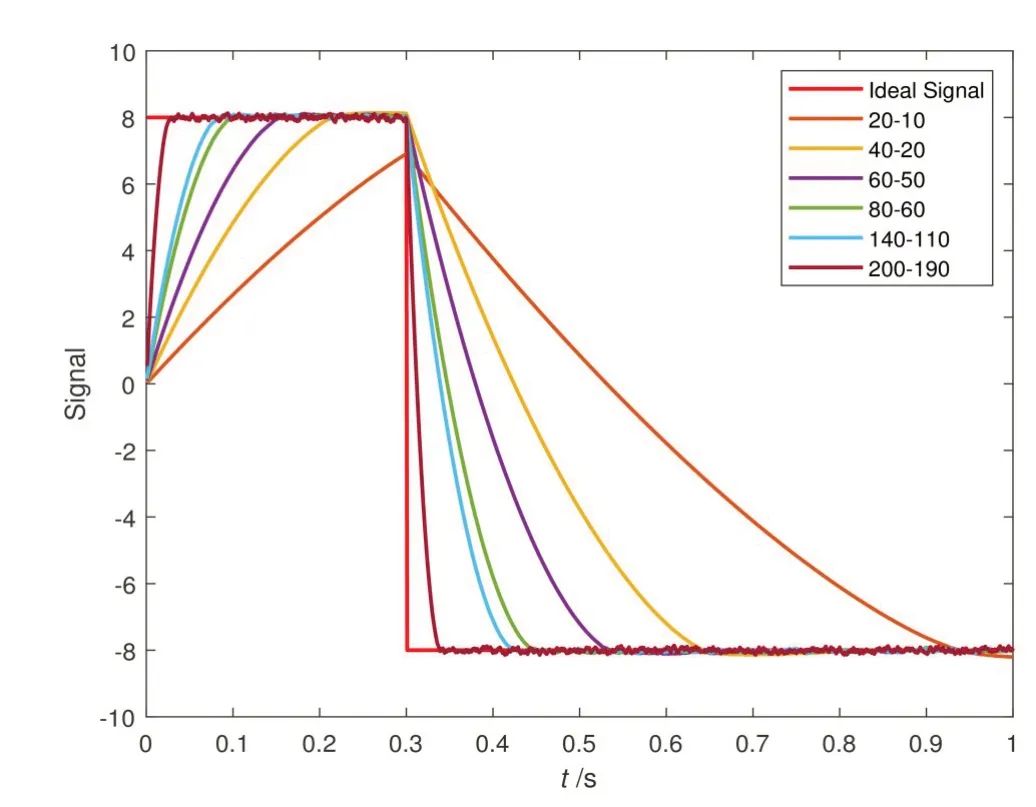
圖4 期望信號與過渡信號
2 基于MATLAB的控制模型設計與分析
2.1 控制模型整體設計
如圖5所示,控制模型主要包括輸入電流模塊、Levant微分跟蹤器模塊、PI控制PWM控制器模塊、電感電流測量模塊、低壓直流電池電壓測量模塊、示波器模塊、雙脈沖多路復用器模塊、雙向DC-DC轉換器模塊、40 V直流電壓源模塊、12 V直流電壓源模塊。輸入電流模塊即為從高壓電池組輸入到控制系統的電流;輸入電流經Levant微分器處理后變為平滑過渡的電流輸入信號;電流信號經過渡后輸入到PI控制PWM控制器模塊,在該模塊中完成PI閉環控制和對應的PWM波形輸出;PWM波形經過雙脈沖多路復用器后傳遞給雙向DC-DC轉換器模塊;在雙向DC-DC轉換器模塊連接有兩個直流電源,分別為40 V直流電壓源模塊和12 V直流電壓源模塊,其中,12V直流電壓源即為低電壓電池,通過MATLAB中的電壓表模型測量電池兩端的電壓值。

圖5 基于MATLAB與PI算法的雙向DC-DC轉換器電流控制模型
設置輸入電流模型如式(7)所示。輸入電流幅值為8 A,并在0.3 s時反轉,即控制系統在0~0.3 s時間內為低壓電池充電狀態,在0.3~1.0 s時間內為低壓電池放電狀態;Levant微分跟蹤器參數α和λ設為140和110,此時輸入電流信號過渡時間設計為0.05 s左右。經多次仿真模擬,試湊出PI控制器的控制參數為kp=0.02,ki=2。設置PWM波形的頻率為10 000 Hz;將雙脈沖多路復用器端口設置為PS端口,可實現兩個帶物理信號端口的脈沖門多路復用,以控制轉換器塊中的開關設備閘門。雙向DC-DC轉換器的導通阻值為0.001 Ω,開關設備為Average Switch(通態電阻型開關),電感L值為0.001 4 H,電容C1值為470 μF,有效電阻0.001 Ω,電容C2值為100 uF,有效電阻0.001 Ω;控制系統采樣周期為5 μs;設置仿真總時間為1 s。
2.2 仿真結果分析
如圖6至圖8所示,為控制系統充放電過程的雙向DC-DC轉換器電感器電流變化曲線和低壓電池兩端電壓變化曲線。在0~0.3 s的充電狀態時間內,從高壓電池組輸入的8 A電流逐漸向低壓電池充電,低壓電池兩端的電壓值逐漸增大至12.35 V左右,這與實際的電池充電狀態相符合。在0~0.05 s時間內電感器電流和低壓電池兩端電壓逐漸較平滑上升,實現了Levant微分跟蹤器對近似方波信號的平滑過渡和過渡時間控制,但在逐漸上升過程中有明顯的振蕩現象,這與對系統施加的干擾信號有關;同時,選取的PI參數也會使得控制信號產生微小震顫。在0~0.3 s時間內,電感器電流值和低壓電池電壓值趨于穩定值8.25 A和12.33 V,但電流和電壓值呈明顯的振蕩變化(圖7),這與輸入電流中加入了干擾信號和PI參數設置有關;同理,在0.3~1 s時間內,電感器電流值和低壓電池電壓值趨于穩定值-7.75 A和10.73 A,電流和電壓值呈明顯的振蕩變化(圖8)。
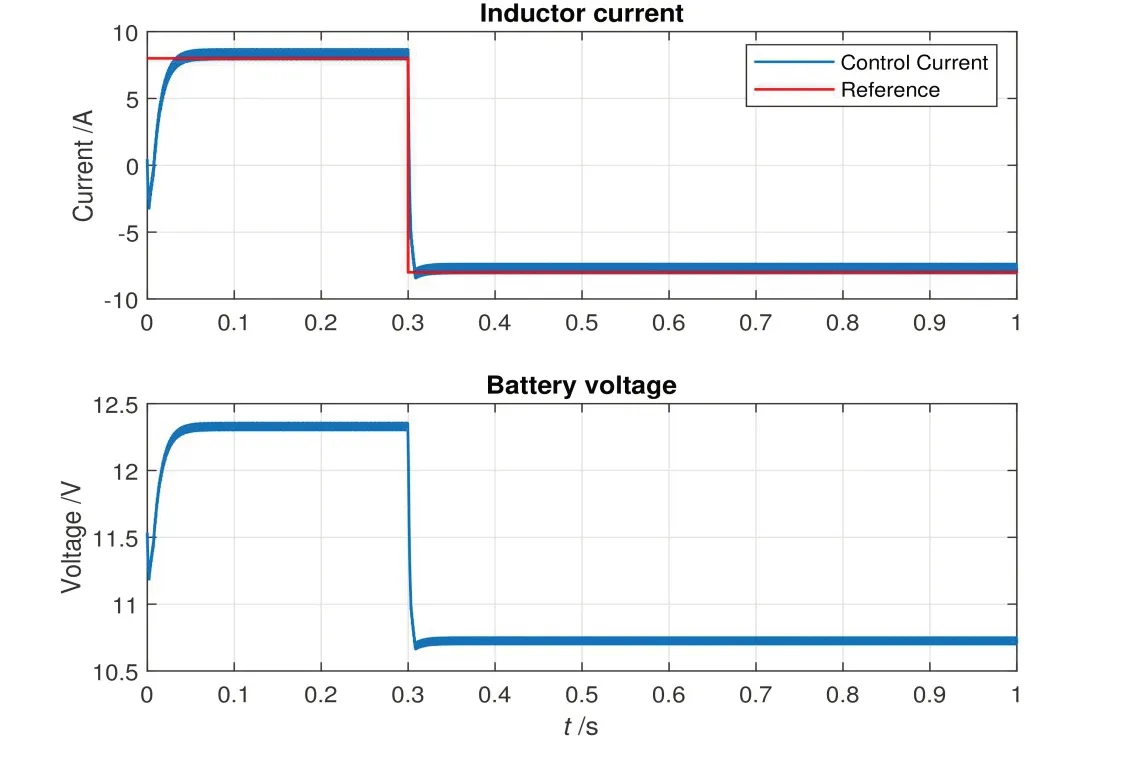
圖6 電感器電流與低壓電池電壓變化曲線
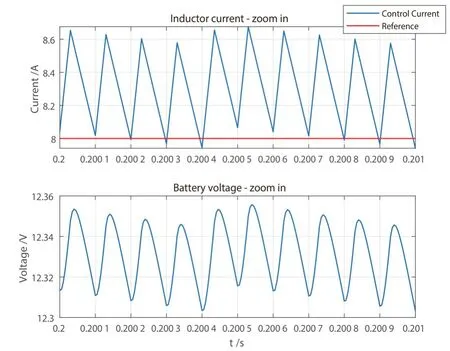
圖7 0.200~0.201 s電感器電流與低壓電池電壓變化曲線
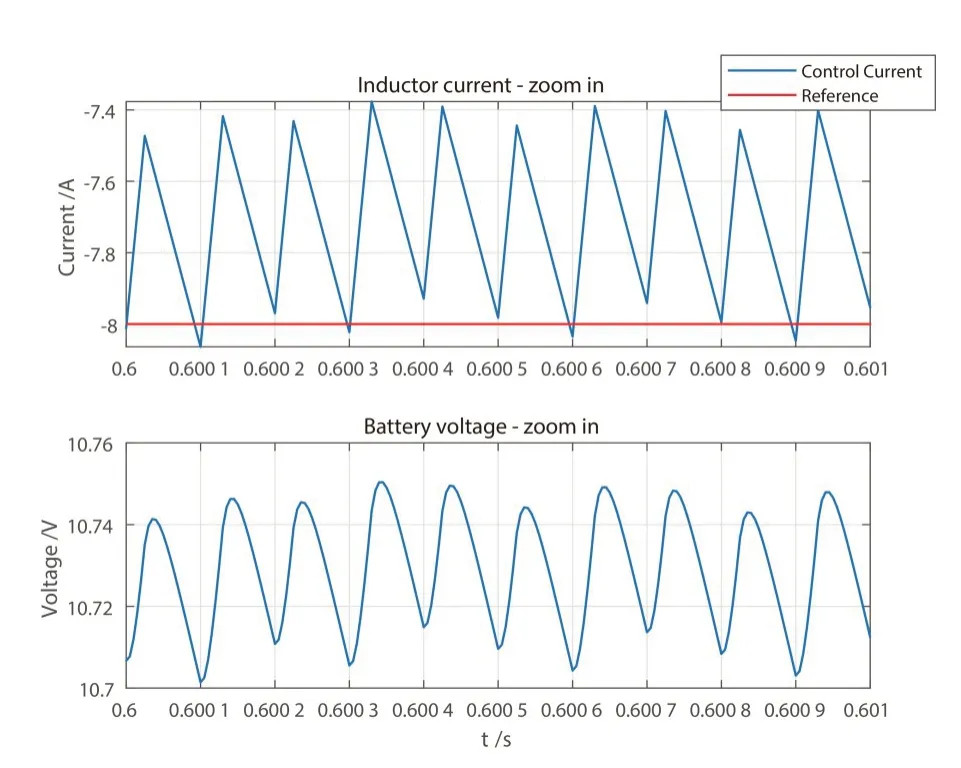
圖8 0.600~0.601 s電感器電流與低壓電池電壓變化曲線
綜合分析可知,基于MATLAB Simulink搭建的仿真模型運行穩定可靠,實現了低壓電池充放電過程的仿真,仿真結果符合電池的實際充放電過程。基于PI算法的PWM電流控制模型能夠較好地實現對電感器電流值的閉環控制。非隔離雙向DC-DC轉換器很好地實現了高壓電池組與低壓電池間的雙向能量傳遞,且具有較高的傳遞效率,能夠實現能源的高效利用。Levant微分跟蹤器對控制系統輸入信號的過渡控制得到了驗證,為車輛雙向DC-DC轉換器的應用提供了有力參考。
3 結語
基于MATLAB Simulink集成仿真環境,搭建并仿真分析了基于PI算法的雙向DC-DC轉換器電流控制模型。通過模擬仿真試湊方法得到了較好的PI控制參數,利用PWM控制策略實現了對非隔離雙向DC-DC轉換器電感器電流的閉環控制,且獲得了較高的控制精度。使用Levant微分跟蹤器實現了控制系統輸入信號的平滑過渡控制。文中的PI控制參數亦可采用相關的智能搜索算法得到最優解,以降低仿真試湊時間;同時,可設置不同的PWM波頻率和采樣頻率等參數,對控制系統進行優化設計。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06