面向電動兩輪車的汽車AEB系統研究*
2022-09-22 10:45:14錢宇彬張進杰常飛李威
汽車技術 2022年9期
錢宇彬 張進杰 常飛, 李威
(1.上海工程技術大學,上海 201600;2.司法鑒定科學研究院,上海 200063)
主題詞:AEB系統 事故避免率 汽車-電動兩輪車碰撞事故
1 前言
電動兩輪車騎車人作為弱勢道路使用者,在汽車安全領域被視為重點保護對象。中國新車評價規程(China-New Car Assessment Programme,C-NCAP)等車輛安全評價規則都已將汽車主動安全納入評分體系,車輛對弱勢道路使用者的保護方面的測試標準也在逐步完善。
自動緊急制動(Autonomous Emergency Braking,AEB)系統是高級駕駛輔助系統(Advanced Driver Assis?tance Systems,ADAS)的重要組成部分,國內外許多學者對其開展了大量的研究。日本學者根據其國內交通數據,為主動避撞系統定義評價指標,對有避撞功能的AEB 系統進行了深入研究。國內對AEB 系統的研究起步較晚。江麗君等人對行車記錄儀視頻進行歸納分析,建立了符合我國實際交通情況的AEB 測試場景;劉穎等以人車事故樣本為基礎,用聚類分析的方法,歸納出5 類AEB 系統行人危險測試場景。C-NCAP 自2018 年起將AEB 系統納入評分標準,但僅限于車對車以及車對行人的AEB 系統,直到2020 年才將汽車對兩輪車的AEB系統測試標準納入體系。
綜上,目前針對涉及電動兩輪車的AEB 測試場景和控制策略的研究較少,本文依據國家車輛事故深度調查體系(National Automobile Accident In-Depth Investi?gation System,NAIS)松江站點真實交通事故數據,分析汽車與電動兩輪車碰撞事故特征,結合汽車事件數據記錄系統(Event Data Recorder,EDR)中的數據和視頻信息,應用PC-Crash 進行事故重建,建立碰撞測試數據庫,并確定AEB系統的關鍵參數,根據前方電動兩輪車運動狀態建立安全距離模型,以此為基礎設計AEB 系統控制策略。
2 汽車-電動兩輪車事故特征分析
本文所選取的86 起事故數據均來自NAIS 松江站點近6年的事故數據,案例信息主要包括事故現場車輛信息、道路信息以及騎車人傷亡信息等。
2.1 相對碰撞位置特征
通過對所篩選的86 起事故案例進行特征分析,在兩車的碰撞事故中,按汽車車身碰撞區域劃分,電動兩輪車與汽車前部碰撞的案例有51起(占比59.3%),與汽車右側碰撞的案例有21起(占比24.4%),與汽車左側碰撞的案例有14起(占比16.3%)。
2.2 碰撞時速度分布特征
研究表明,在涉及電動兩輪車的交通事故中,騎車人頭部的損傷程度與碰撞時汽車的速度密切相關;據分析,當碰撞車速達到50 km/h時,騎車人的頭部損傷簡明定級標準(Abbreviated Injury Scale,AIS)將達到3。分析所選取的事故案例樣本信息,得到兩車碰撞時的速度分布特征,如圖1和圖2所示。
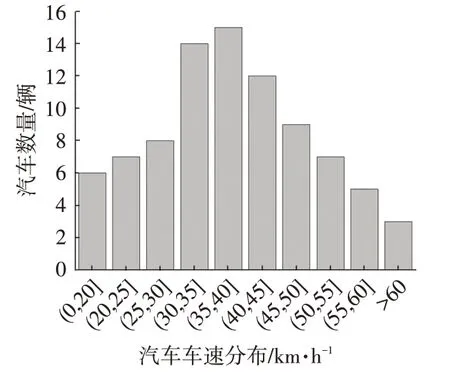
圖1 汽車車速分布
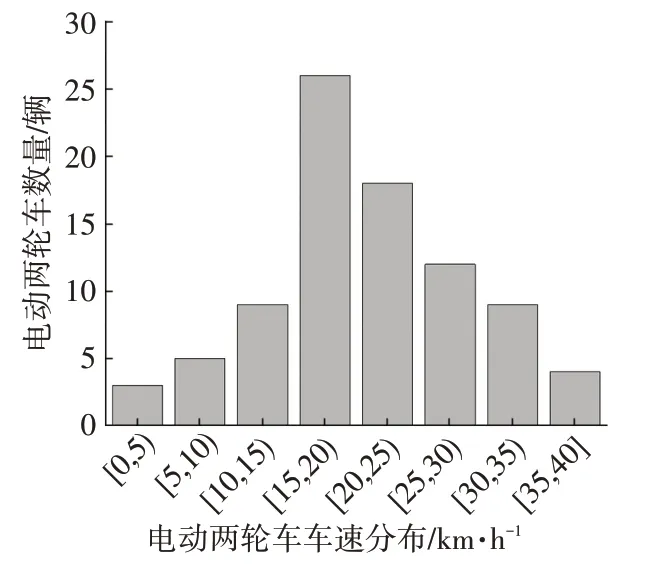
圖2 電動兩輪車車速分布
由圖1 和圖2 可得:在所篩選的事故案例中,碰撞事故發生時,汽車的速度主要集中在30~45 km/h,電動兩輪車的速度主要集中在15~25 km/h,這也與松江地區的道路工況基本吻合。值得關注的是,個別案例中電動兩輪車的速度接近40 km/h,存在極大的安全隱患。
3 仿真工況及參數設置
以前方電動兩輪車運動狀態為基礎,并參考2020年版C-NCAP 中關于AEB 系統性能測試場景的要求,本文將AEB 系統-電動兩輪車的測試場景分為4 種,即接近前方靜止車輛、勻速車輛、制動車輛和橫穿車輛。具體仿真工況如表1所示,其中“本車”和“目標車”分別指汽車和電動兩輪車。
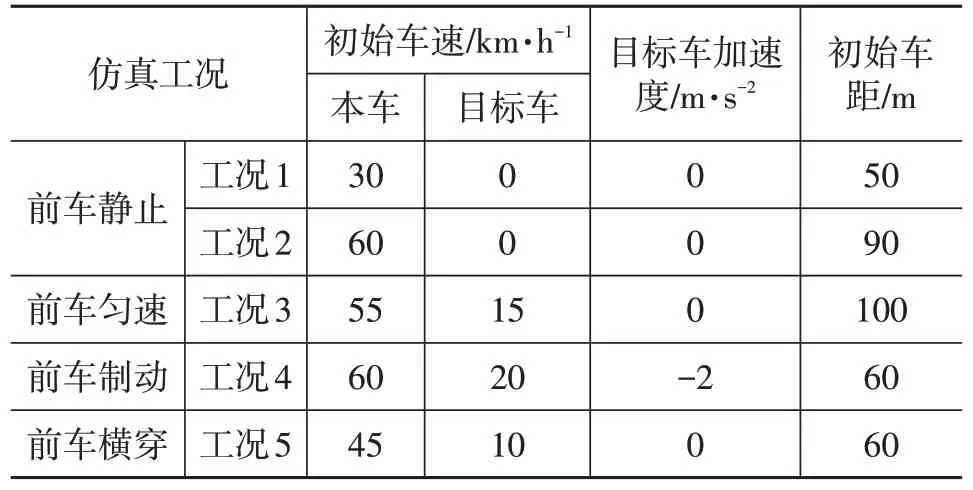
表1 仿真工況
3.1 場景設置
在PreScan 軟件中,運用圖形用戶界面(Graphical User Interface,GUI)模塊中的場景搭建功能對汽車與電動兩輪車典型事故場景進行搭建。首先根據本地區交通路況,建立一條符合標準的結構化道路,道路長度為400 m,雙向兩車道。此外,路面附著系數設置為0.8,天氣和光照條件默認為良好。
仿真車型選擇較為常見的奧迪,將CarSim 中建好的車輛動力學模型導入PreScan,選擇軟件自帶的兩輪車模型,結合相關標準以及實際情況進行相關參數的設置。
3.2 傳感器設置
通過對碰撞事故發生前死亡、重傷以及輕傷事故案例中電動兩輪車被探測到的概率確定最佳的探測距離和探測角度,傳感器參數設置如圖3 所示,選取120°為最佳探測角,45 m為最佳探測距離,且選取毫米波雷達作為車輛傳感器(也有車輛中的傳感器是毫米波雷達和攝像頭的組合),基本符合實際車輛中AEB系統的需求。
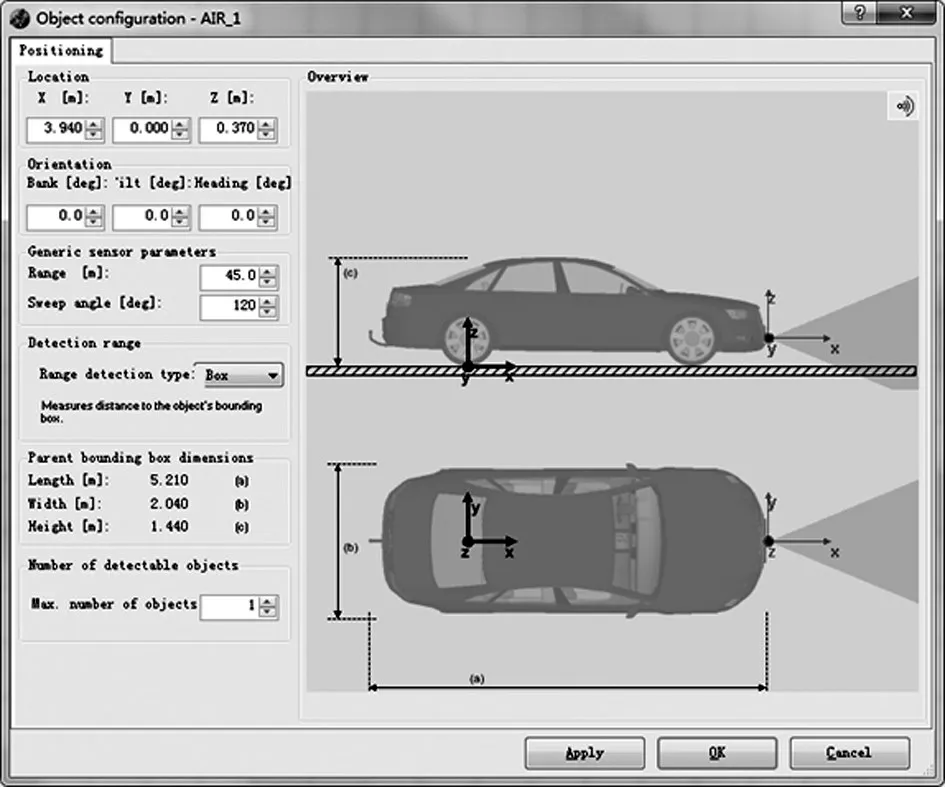
圖3 傳感器參數設置
目前,AEB系統危險狀態的判定方法主要包括時間判斷方法和距離判斷方法。本文選用的是距離判斷方法,設定危險系數為:

式中,為本車與目標車的相對距離;為全力制動安全距離;為部分制動安全距離。
當>1時,即>時,車輛處于安全狀態;當0<<1時,即>>時,本車與目標車有碰撞的可能性,若駕駛員未采取制動措施,則AEB 系統會啟動部分制動功能;當<0 時,即>時,本車狀態很危險,需要緊急全力制動快速介入,才能降低或避免碰撞事故的發生。
本文根據目標車運動狀態建立全力制動和部分制動安全距離模型,采用分級制動策略,當0<<1 時,控制策略輸出-4 m/s的部分制動加速度,當<0 時,輸出-8 m/s的全力制動加速度,最后利用模糊PID 控制策略對AEB 系統進行分層控制,實現對車輛期望加速度的精準跟隨。
4 仿真結果與分析
4.1 接近前方靜止車輛
工況1:本車從原點出發,仿真時長為15 s,仿真結果如圖4所示。
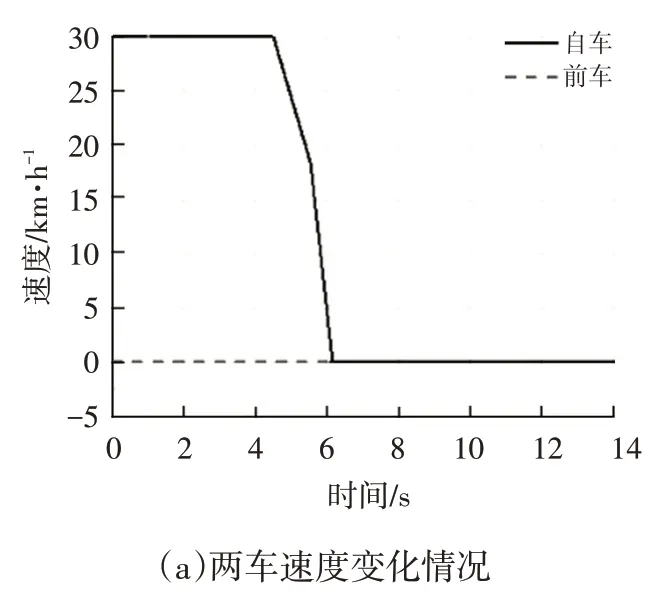
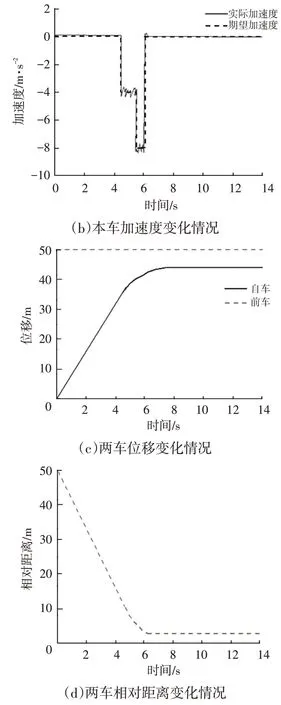
圖4 工況1仿真結果
由圖4可知:在第4.4 s時,本車AEB系統檢測到有碰撞風險,向車輛輸入-4 m/s的部分制動加速度,此時本車速度下降;在第5.5 s時,隨著兩車實時距離減小,碰撞風險等級提升,AEB系統向車輛輸入-8 m/s的全力制動加速度;繼續行駛0.6 s后,車輛停止,兩車最終相對距離為3.01 m。
工況2:本車從原點出發,仿真時長為15 s,仿真結果如圖5所示。
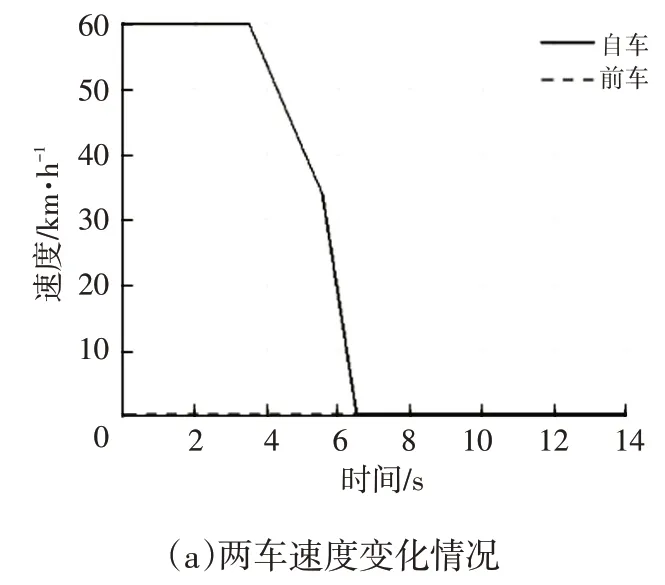
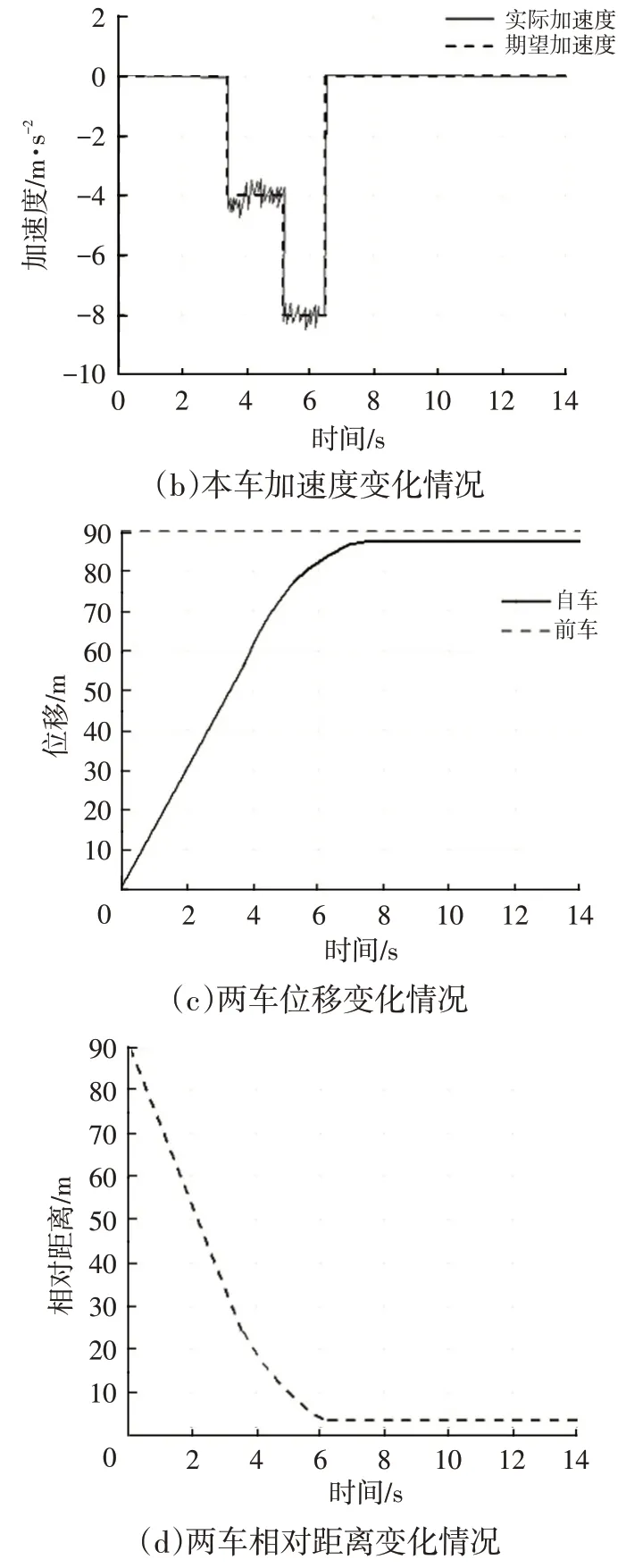
圖5 工況2仿真結果
由圖5 可知:在第3.5 s 時,本車的AEB 系統檢測到有碰撞風險,向車輛輸入-4 m/s的部分制動加速度,此時本車速度減小;在第5.31 s 時,碰撞風險等級提升,AEB系統向車輛輸入-8 m/s的全力制動加速度;繼續行駛1.18 s后,車輛停止,兩車最終相對距離為2.55 m。
4.2 接近前方勻速車輛
工況3:本車從原點出發,仿真時長為15 s,仿真結果如圖6所示。
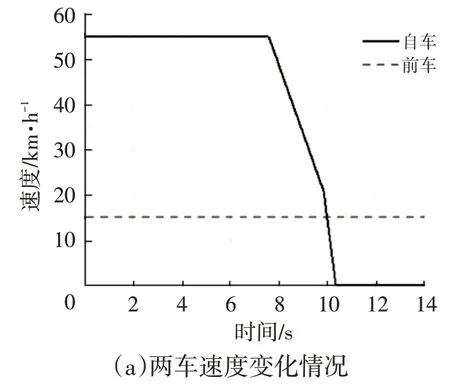
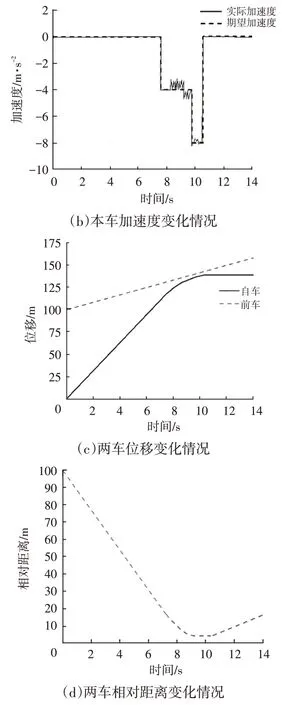
圖6 工況3仿真結果
由圖6 可知:在第7.6 s 時,本車的AEB 系統檢測到有碰撞風險,向車輛輸入-4 m/s的部分制動加速度,此時本車速度減小,碰撞風險等級提升;在第9.91 s 時,AEB系統向車輛輸入-8 m/s的全力制動加速度;行駛至第10.6 s時,本車最終停止,此時兩車間距離為2.17 m。
4.3 接近前方制動車輛
工況4:本車從原點出發,仿真時長為15 s,仿真結果如圖7所示。
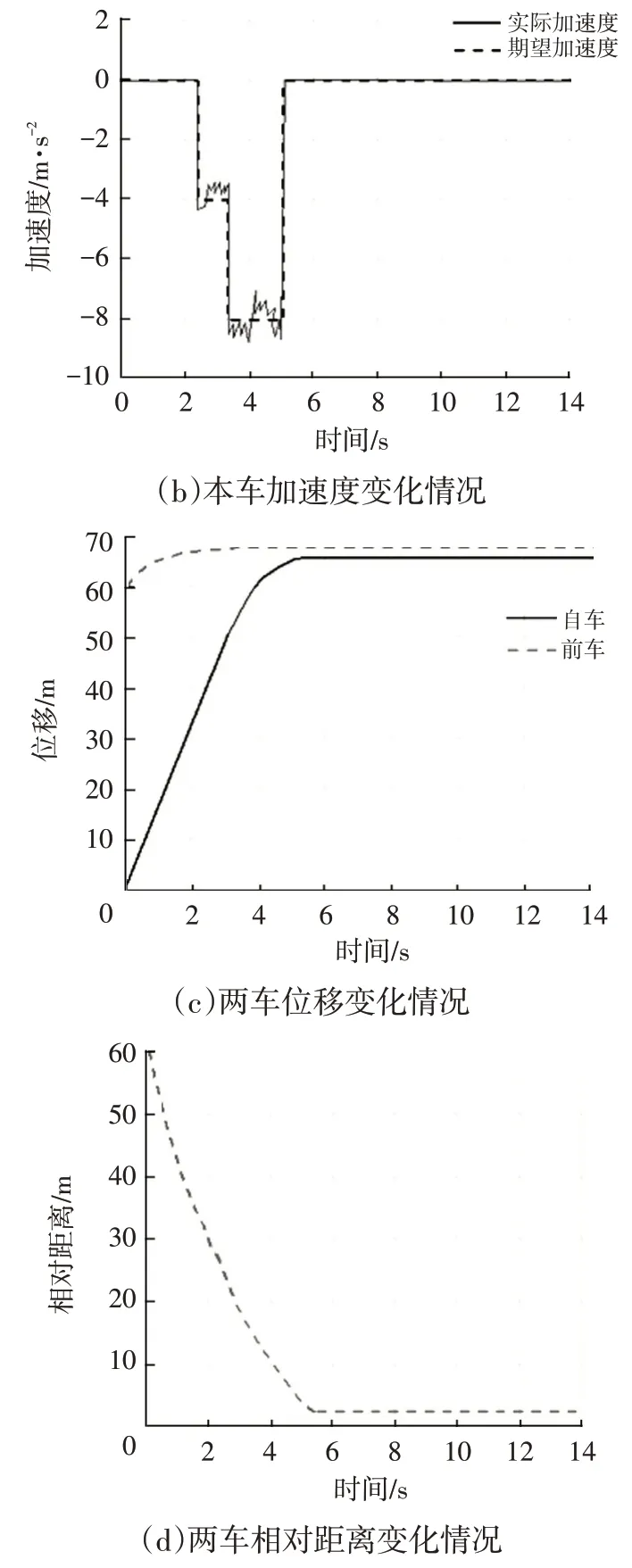
圖7 工況4仿真結果
由圖7可知:在第2.49 s時,AEB系統檢測到有碰撞風險,向車輛輸入-4 m/s的部分制動加速度;在第2.78 s時,碰撞風險等級提升,電動兩輪車停止運動而自車繼續減速行駛;在第3.5 s 時,碰撞危險等級進一步提升,AEB系統向車輛輸入-8 m/s的全力制動加速度,車輛快速制動;繼續行駛1.58 s后,本車停止運動,兩車速度均為零,最終相距1.45 m。
4.4 接近前方橫穿車輛
工況5:本車從原點出發,仿真時長為10 s,仿真結果如圖8所示。
由圖8可知:在第3.29 s時,AEB系統檢測到前方有碰撞風險,向車輛輸入-4 m/s的部分制動加速度;隨著本車繼續向前行駛,兩車的縱向距離縮短,碰撞風險等級提升,在第4.82 s 時,AEB 系統向車輛輸入-8 m/s的全力制動加速度;繼續行駛0.8 s 后,本車停止運動,兩車最終的縱向相對距離為1.8 m。
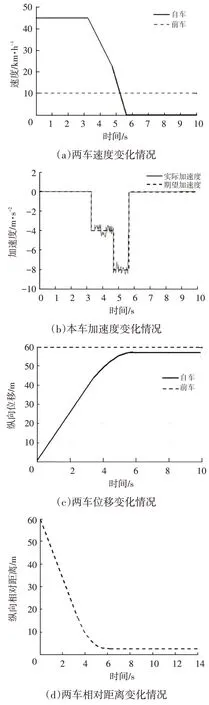
圖8 工況5仿真結果
4.5 仿真結果分析
綜合前文的仿真方法,對碰撞測試數據庫中86 起事故案例進行仿真,實際數據與仿真結果的對比如表2所示。其中:為汽車初始速度;為電動兩輪車初始速度;為事故的實際碰撞速度;為AEB系統介入后的碰撞速度仿真結果;為兩車停止時的最終距離仿真結果。
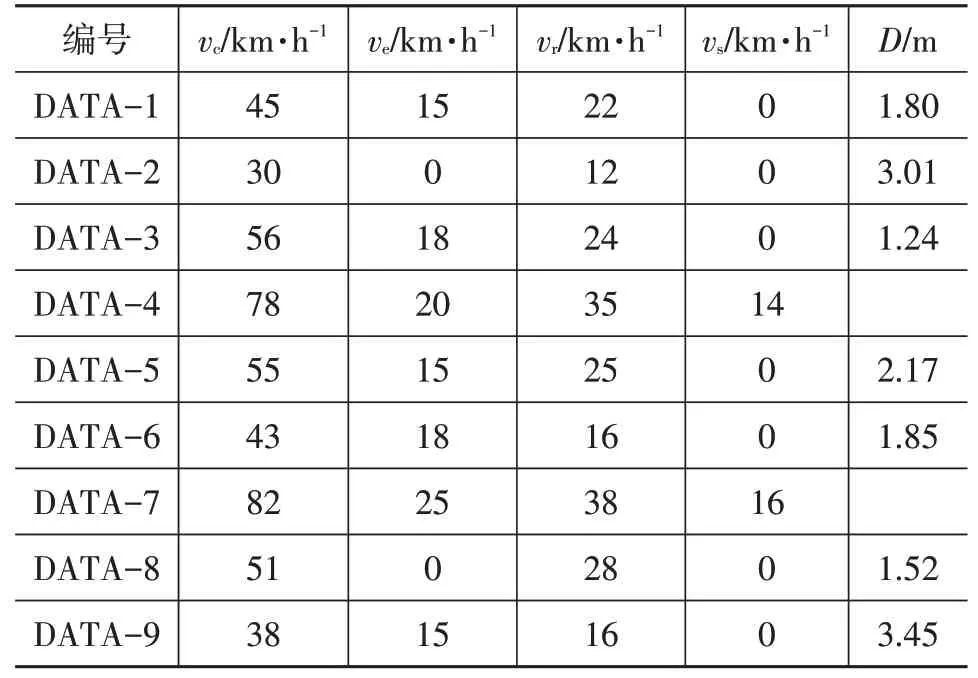
表2 實際數據與仿真結果對比
對各種工況的仿真結果進行統計分析,結果如表3所示,由表3可知,在車輛配備AEB系統條件下,85%以上的碰撞事故可以避免。

表3 典型工況下AEB系統事故避免率仿真結果 %
此外,當車輛速度過大時,碰撞事故無法避免,但碰撞時的車輛速度會降低。通過將仿真結果與實際數據進行比較,配備AEB 系統后,汽車的平均碰撞速度由29.3 km/h 下降到13.2 km/h,速度降低了51.5%,提高了對騎車人的安全保護水平。有、無AEB 系統條件下汽車碰撞速度累積分布如圖9 所示,由圖9 可以看出,在配備AEB 系統的條件下,超過80%的事故中汽車的碰撞速度不會超過21 km/h,驗證了AEB 系統的有效性。
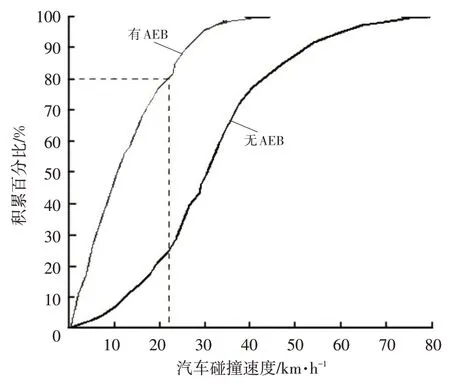
圖9 汽車碰撞速度累積分布
5 結束語
本文參照C-NCAP 中AEB 系統兩輪車測試場景,確定仿真工況,分別對5 種工況案例進行仿真,得出以下結論:
a.在車輛配備AEB系統的條件下,事故避免率達到了85%以上。
b.在碰撞無法避免的事故中,汽車的平均碰撞速度由29.3 km/h下降到13.2 km/h,降低了51.5%。
本文在確定電動兩輪車的運動狀態中,只分析了兩車同向行駛以及電動兩輪車橫穿車輛行駛路徑這2 種類型的工況,其他復雜的工況如轉彎、倒車等,還需要進一步研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
汽車與安全(2019年9期)2019-11-22 09:48:03
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50