一種平面二自由度并聯(lián)機(jī)構(gòu)工作空間分析
2022-09-19 05:53:26張蔚陳浩
機(jī)床與液壓 2022年5期
關(guān)鍵詞:模型
張蔚,陳浩
(常州紡織服裝職業(yè)技術(shù)學(xué)院機(jī)電工程系,江蘇常州 213164)
0 前言
并聯(lián)機(jī)構(gòu)在動平臺與定平臺之間通過至少兩條以上獨(dú)立的開環(huán)運(yùn)動支鏈相連接,具有承載能力強(qiáng)、結(jié)構(gòu)剛度大、運(yùn)動精度高等優(yōu)點(diǎn),在工業(yè)界有著廣泛的應(yīng)用。在多軸加工中心、航空模擬器等一些特殊應(yīng)用領(lǐng)域,類似Stewart機(jī)構(gòu)等六自由度并聯(lián)機(jī)構(gòu)受到許多學(xué)者和工程技術(shù)人員的青睞;然而,無顯式運(yùn)動學(xué)正解、控制復(fù)雜、設(shè)計制造成本高等問題,也成為了其不可回避的技術(shù)難點(diǎn)。事實上,在許多運(yùn)用場合下,并不完全需要過多的運(yùn)動自由度,少自由度并聯(lián)機(jī)構(gòu)更具經(jīng)濟(jì)適用性和工程推廣價值。
相比傳統(tǒng)串聯(lián)機(jī)構(gòu),并聯(lián)機(jī)構(gòu)的工作空間相對較小,因此,工作空間是評價并聯(lián)機(jī)構(gòu)使用性能的一項重要指標(biāo)。石夢蕊、趙新華基于運(yùn)動學(xué)反解方程,在給定的設(shè)計參數(shù)搜索空間內(nèi),通過掃描搜索法獲得了3-PRRRR機(jī)構(gòu)的工作空間;類似地,周毅鈞等采用蒙特卡洛方法完成了2RPU/2SPS機(jī)構(gòu)工作空間的計算。上述搜索方法雖能夠在一定設(shè)計變量取值空間內(nèi)計算出并聯(lián)機(jī)構(gòu)的工作空間,但仍存在一定的局限性:一方面,直接搜索方法計算量較大;另一方面,也無法掌握工作空間指標(biāo)在全局變量空間內(nèi)的變化趨勢。
GAO、LIU等提出了一種無量綱模型,可將機(jī)構(gòu)運(yùn)動學(xué)參數(shù)完整設(shè)計空間轉(zhuǎn)化到一個有限設(shè)計平面內(nèi),通過繪制相應(yīng)的平面性能圖譜獲得并聯(lián)機(jī)構(gòu)工作空間性能的全局變化規(guī)律,并以此為相關(guān)機(jī)構(gòu)參數(shù)的優(yōu)化提供直觀的設(shè)計依據(jù)。
本文作者以一個平面二自由度并聯(lián)機(jī)構(gòu)為例,首先通過運(yùn)動學(xué)計算獲得了機(jī)構(gòu)的兩種反解模型,并完成了奇異分析,而后重點(diǎn)針對兩種反解模型下機(jī)構(gòu)工作空間可能存在的所有形式進(jìn)行了討論,最終通過建立機(jī)構(gòu)運(yùn)動學(xué)參數(shù)的無量綱模型,繪制該機(jī)構(gòu)最大矩形工作空間的性能圖譜,并指導(dǎo)了機(jī)構(gòu)參數(shù)的優(yōu)化設(shè)計。
1 機(jī)構(gòu)描述
二自由度平面并聯(lián)機(jī)構(gòu)如圖1所示,由一個固定基座、一個動平臺、兩個滑塊和兩條運(yùn)動支鏈組成。每條運(yùn)動支鏈包含3根等長連桿,每根連桿的兩端均通過虎克鉸分別連接到動平臺和滑塊上。
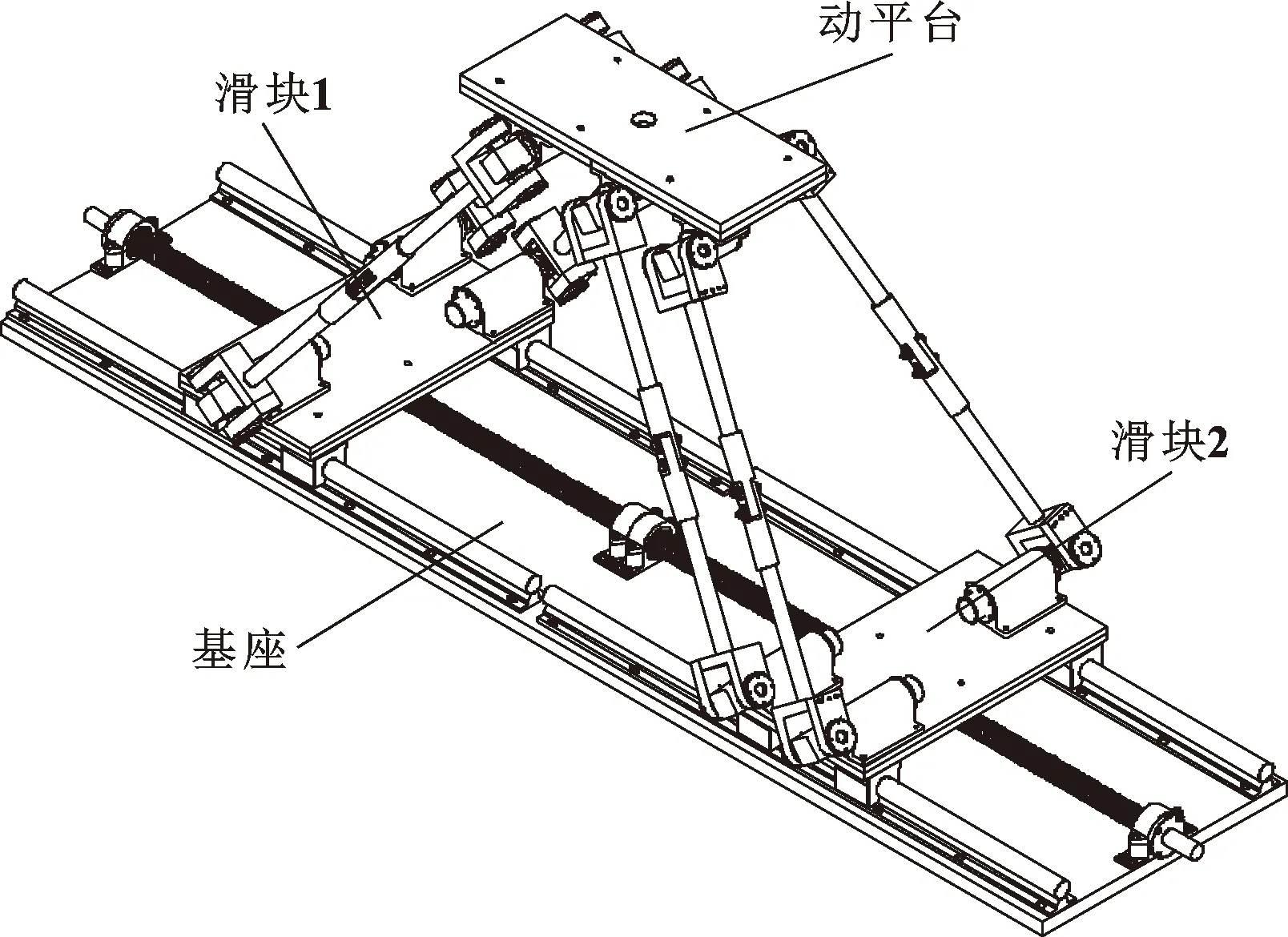
圖1 平面二自由度并聯(lián)機(jī)構(gòu)
圖2為該機(jī)構(gòu)在兩個相互正交平面內(nèi)的投影視圖。從視圖A中可以看出,兩條運(yùn)動支鏈對稱分布,連同動平臺與滑塊、固定基座構(gòu)成一個封閉對稱的結(jié)構(gòu);同一運(yùn)動支鏈中的3根連桿的投影互相平行,與動平臺和滑塊組成一個過約束平行四邊形機(jī)構(gòu),這樣確保了動平臺運(yùn)動過程中始終處于水平狀態(tài)。在視圖B中,布置在同一側(cè)的3根連桿投影重合,與滑塊和動平臺構(gòu)成一個等腰梯形結(jié)構(gòu)。由于虎克鉸的約束,該等腰梯形結(jié)構(gòu)保持穩(wěn)定,不會導(dǎo)致動平臺在視圖B平面內(nèi)的翻轉(zhuǎn)運(yùn)動。基于以上結(jié)構(gòu)特點(diǎn),通過驅(qū)動兩個滑塊的水平移動,可以使得動平臺在視圖A中做二自由度的平面運(yùn)動。
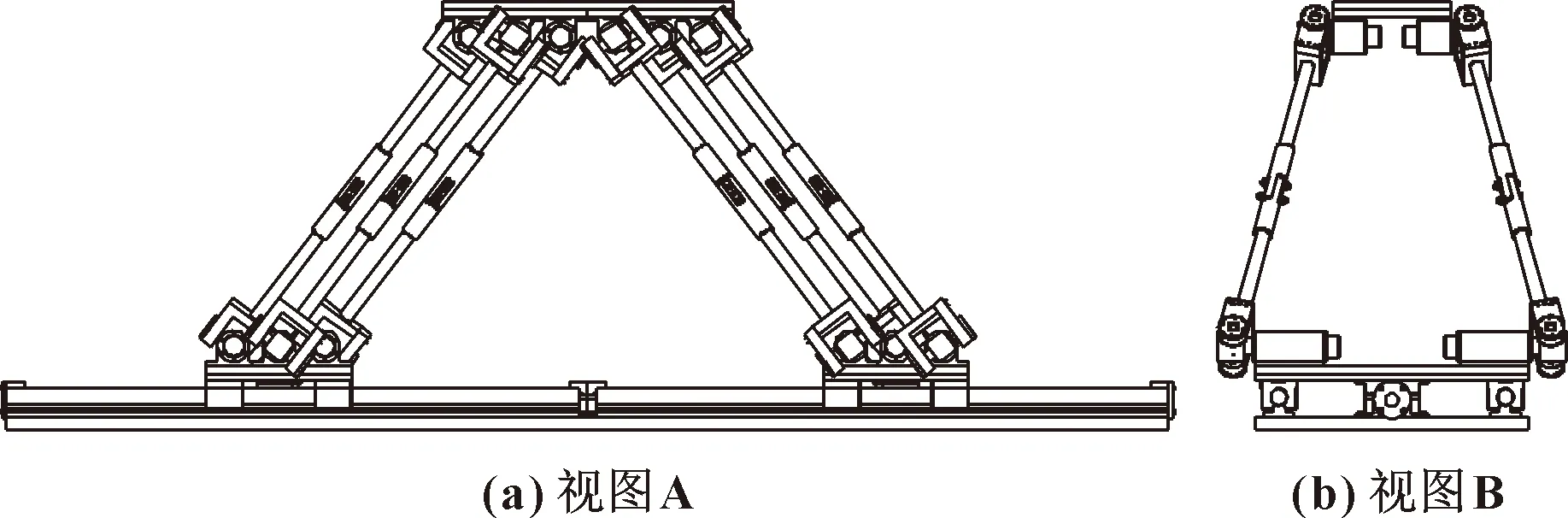
圖2 平面二自由度并聯(lián)機(jī)構(gòu)投影視圖
2 機(jī)構(gòu)運(yùn)動學(xué)分析
二自由度平面運(yùn)動機(jī)構(gòu)的結(jié)構(gòu)簡圖如圖3所示。為方便以下分析,建立一個固定坐標(biāo)系-,其原點(diǎn)固定在基座的中心處。動平臺的中點(diǎn)記為點(diǎn),即為整個機(jī)構(gòu)的運(yùn)動輸出點(diǎn)。由于運(yùn)動支鏈中的平行四邊形結(jié)構(gòu),使得在運(yùn)動平面內(nèi),相同運(yùn)動支鏈中的3根連桿的運(yùn)動情況相同,因此,可以將每條運(yùn)動支鏈簡化為連桿 (=1,2)。在坐標(biāo)系-中,各鉸接點(diǎn)、(=1,2)和運(yùn)動輸出點(diǎn)的坐標(biāo)分別記為(,)、(,)和(,)。其中,運(yùn)動輸入量為兩滑塊的水平位置,即(=1,2);運(yùn)動輸出量為(,)。
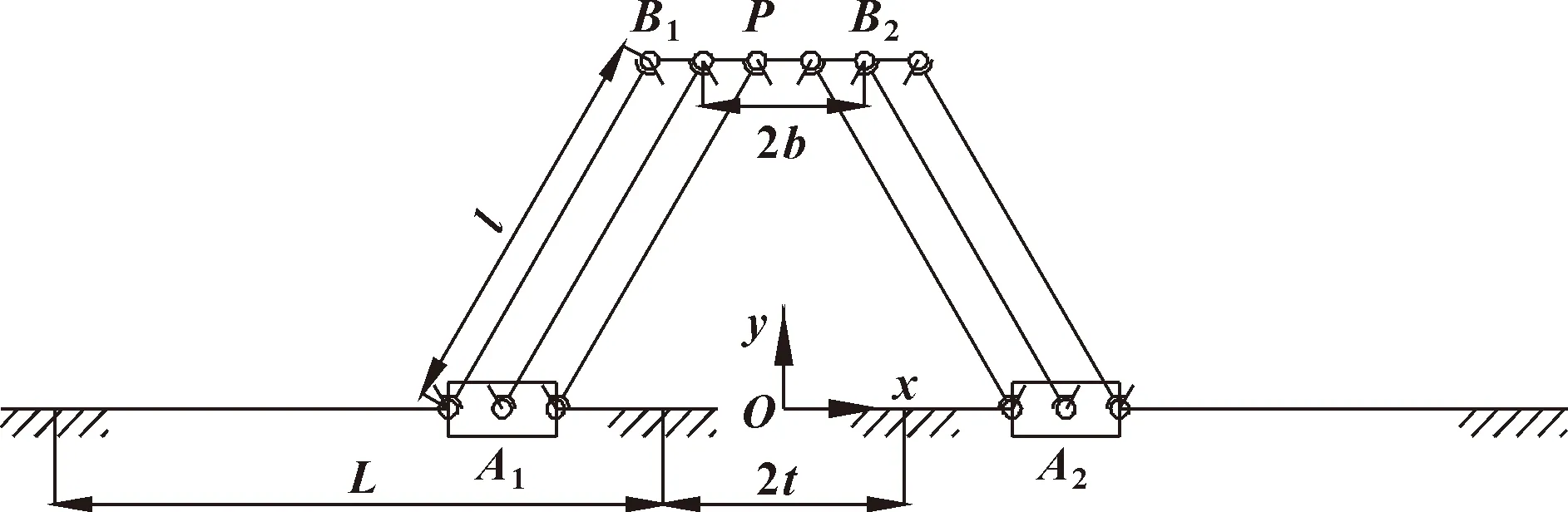
圖3 機(jī)構(gòu)運(yùn)動簡圖
動平臺上鉸點(diǎn)之間的長度記為2,稱為動平臺的有效長度;(=1,2)的長度記作,稱為連桿的投影長度;兩個滑塊在兩條導(dǎo)軌上的最小間距記為2;每個滑塊在單條導(dǎo)軌上的實際運(yùn)動長度記作。所有的長度尺寸參數(shù)大于0。因此,運(yùn)動輸入量(=1,2)的變化范圍為
1∈[--,-],2∈[,+]
(1)
為了能夠?qū)崿F(xiàn)機(jī)構(gòu)的正常裝配,還必須滿足以下裝配約束條件
|-|<
(2)
2.1 運(yùn)動學(xué)正解
由圖3可以得到機(jī)構(gòu)的運(yùn)動矢量方程
=++=1,2
(3)


因此,式(3)可進(jìn)一步轉(zhuǎn)化為正解方程
(4)
由式(4)可以看出,該機(jī)構(gòu)運(yùn)動學(xué)正解唯一。
2.2 運(yùn)動學(xué)反解
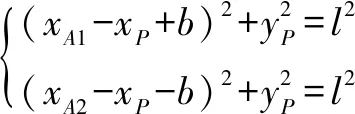
將式(4)中動平臺坐標(biāo)(,)作為已知,滑塊坐標(biāo)(=1,2)作為未知,可進(jìn)一步獲得機(jī)構(gòu)運(yùn)動學(xué)反解方程
(5)
從式(5)中可以看出,由于=±1,使得機(jī)構(gòu)存在兩種運(yùn)動反解情況。當(dāng)=+1時,機(jī)構(gòu)的反解模型如圖4(a)所示,稱為第一種反解模型;當(dāng)=-1時,機(jī)構(gòu)的反解模型如圖4(b)所示,稱為第二種反解模型。
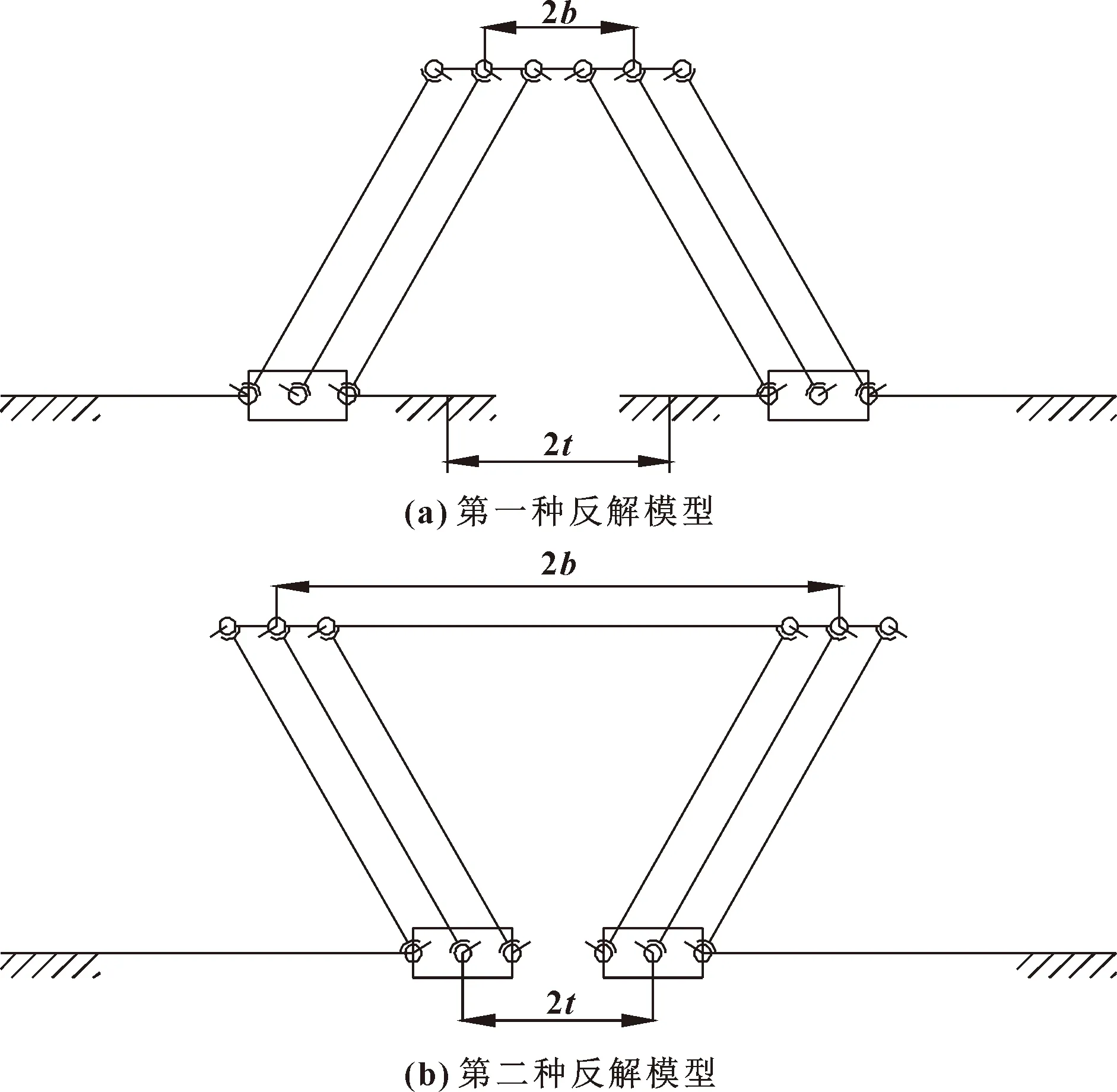
圖4 兩種反解模型
從圖4中不難看出,能夠出現(xiàn)第一種反解模型的條件為+>;而僅出現(xiàn)第一種反解模型的約束條件為>。類似地,能夠出現(xiàn)第二種反解模型的條件為<;而僅出現(xiàn)第二種反解模型的約束條件為+<。
對比兩種反解模型,不難看出機(jī)構(gòu)在第一種反解模型狀態(tài)下時,機(jī)構(gòu)動平臺寬度相對兩滑塊之間的間距較小,其承受的載荷全部在兩滑塊之間,因此具有較好的穩(wěn)定性;而工作在第二種反解模型下時,機(jī)構(gòu)動平臺寬度相對兩滑塊之間的間距較大,其承受的載荷有部分在兩滑塊之外,此時機(jī)構(gòu)的穩(wěn)定性較差。
2.3 奇異分析
由于機(jī)構(gòu)的奇異會導(dǎo)致其可控性和剛度變差,因此必須對機(jī)構(gòu)進(jìn)行奇異性分析,以避免機(jī)構(gòu)在運(yùn)動中出現(xiàn)奇異位形。
反解方程式(5)可變形為
(6)
對上式求導(dǎo),可進(jìn)一步獲得:
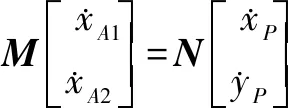
(7)
其中:
從而可以獲得運(yùn)動雅可比矩陣:
(8)
在并聯(lián)機(jī)構(gòu)中,奇異位形出現(xiàn)在當(dāng)det()=0、det()=0或det()和det()同時為0的情況下。以下針對各種奇異位形的出現(xiàn)條件進(jìn)行具體分析。
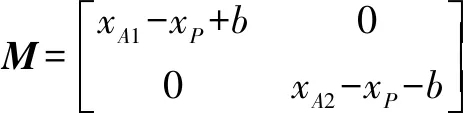
(1)det()=0
由矩陣的表達(dá)式可以得到出現(xiàn)這種奇異位形的條件
(1-+)(2--)=0
(9)
故當(dāng)1-+=0或2--=0時機(jī)構(gòu)處于該奇異位形狀態(tài)。由機(jī)構(gòu)的對稱性可知,1-+=0等價于2--=0,因此,這種奇異位形出現(xiàn)在當(dāng)兩滑塊之間的距離2-1等于動平臺的有效長度2的情況下。此時,機(jī)構(gòu)的動平臺、兩條運(yùn)動支鏈以及固定基座構(gòu)成一個平行四邊形結(jié)構(gòu),在這種奇異位形下,機(jī)構(gòu)將失去剛度,且變得不可控,如圖5所示。在此把這種奇異位形稱為第一類奇異位形。在機(jī)構(gòu)正常工作中應(yīng)該避免出現(xiàn)這種奇異位形狀態(tài)。
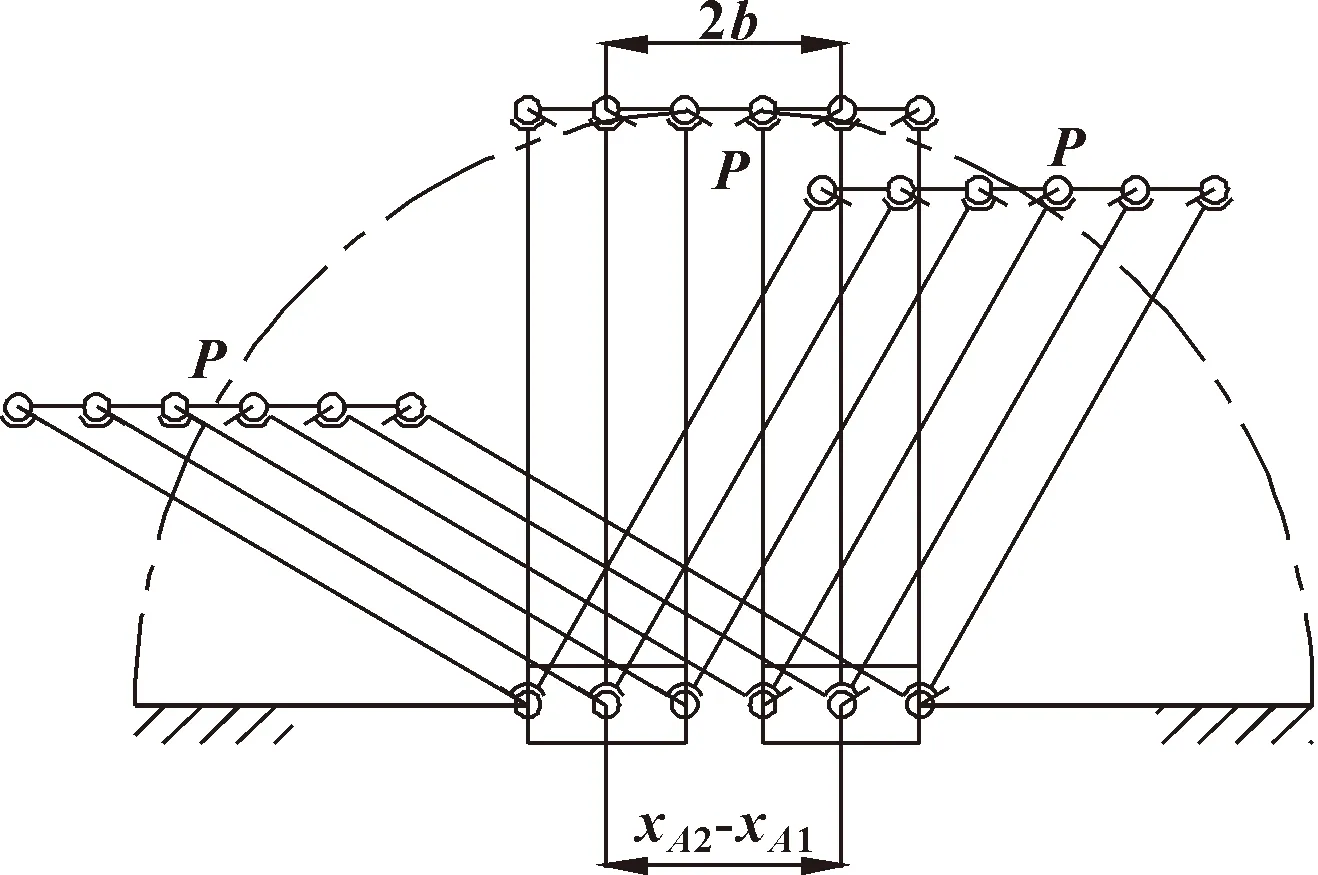
圖5 第一類奇異位形
(2) det()=0
由矩陣的表達(dá)式可以得到出現(xiàn)這種奇異位形的條件
(2-1-2)=0
(10)
故當(dāng)=0或2-1-2=0時機(jī)構(gòu)處于該奇異位形狀態(tài)。不難看出,第二種條件2-1-2=0包含于第一類奇異位形出現(xiàn)的條件;另外,由第一種條件=0可知,當(dāng)連桿(=1,2)處于水平狀態(tài)時也同樣出現(xiàn)奇異,由于機(jī)構(gòu)存在兩種反解模型,因此該奇異狀態(tài)也存在兩種情況,如圖6所示。在這種奇異狀態(tài)下,機(jī)構(gòu)將被鎖死,處于不可移動的狀態(tài)。在此把這種奇異位形稱為第二類奇異位形。為了避免這種奇異位形,在機(jī)構(gòu)運(yùn)動中要盡量保證較大的壓力角,避免動平臺接近其最低位置。

圖6 第二類奇異位形
(3)det()=0且det()=0
由于第一類奇異位形的出現(xiàn)條件,即連桿(=1,2)處于豎直狀態(tài),也同時是第二類奇異位形的出現(xiàn)條件之一,因此,在該條件下,將導(dǎo)致矩陣與同時奇異。故此情況下奇異位形屬于第一類奇異位形的特殊情況。
3 理論工作空間
該平面二自由度機(jī)構(gòu)的理論工作空間是兩個滑塊在式(1)確定的運(yùn)動范圍內(nèi)變化時,點(diǎn)在運(yùn)動平面內(nèi)所覆蓋的面域。將式(1)中兩個滑塊的運(yùn)動極限位置分別代入式(6)可以得到4個極限圓、、和,其圓心分別為(-+,0)、(-,0)、(--+,0)和(+-,0)。其中,圓和稱為內(nèi)極限圓,圓和稱為外極限圓。該機(jī)構(gòu)的理論工作空間就是由這4個極限圓確定的,圖7所示陰影部分面域即為其理論工作空間。
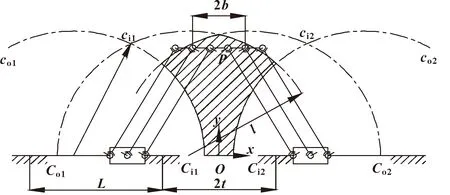
圖7 理論工作空間
由上文分析可知該機(jī)構(gòu)存在兩種反解模型,而第一類奇異位形就發(fā)生在兩種反解模型相互轉(zhuǎn)換的臨界姿態(tài)下。為避免第一類奇異位形的出現(xiàn),就必須避免機(jī)構(gòu)在工作中發(fā)生兩種反解模型之間的姿態(tài)轉(zhuǎn)換。因此,以下分別針對在兩種反解模型下的機(jī)構(gòu)理論工作空間進(jìn)行討論。
3.1 第一種反解模型下的理論工作空間
當(dāng)機(jī)構(gòu)工作在第一種反解模型時,在滿足約束方程(2)和+>的前提下,4個極限圓圓心的位置關(guān)系條件可以總結(jié)為以下4種條件集合,見表1。
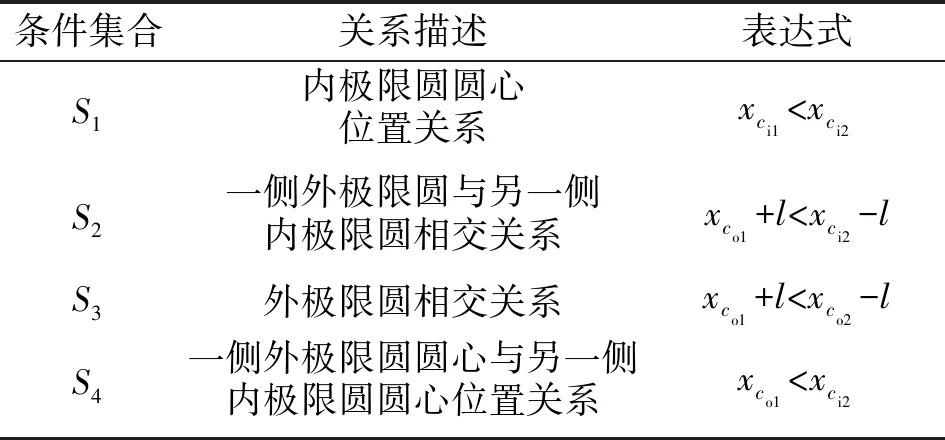
表1 第一種反解模型下極限圓位置關(guān)系條件

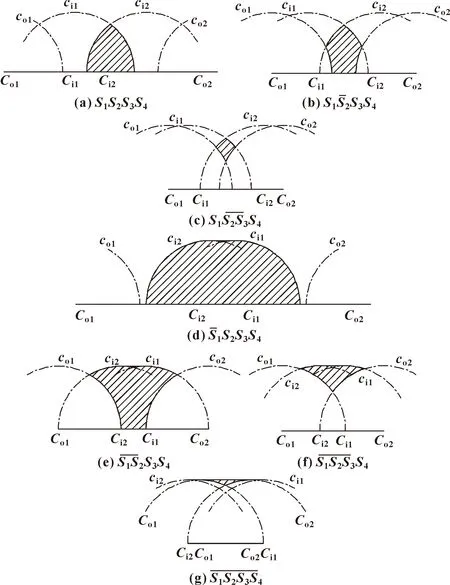
圖8 第一種反解模型下的理論工作空間
從圖8中可以看出,在(a)(b)(c)3種條件下,機(jī)構(gòu)由于尺寸條件的限制,在其工作空間中將不可能出現(xiàn)第一類奇異位形,尤其是在條件(c)下,在其工作空間中也不會出現(xiàn)第二類奇異位形;在(d)(e)(f)(g)4種條件下,在其工作空間中可能出現(xiàn)第一類奇異位形,即機(jī)構(gòu)運(yùn)動可能出現(xiàn)兩種反解模型之間的轉(zhuǎn)換,因此,必須在兩滑塊的運(yùn)動控制上限制其接近第一類奇異位形。另外,在條件(f)和(g)下,機(jī)構(gòu)在其工作空間中不會出現(xiàn)第二類奇異位形,但對于(d)和(e)兩種條件而言,則可能出現(xiàn)第二類奇異位形,這就需要通過兩滑塊的運(yùn)動控制來保證較大的壓力角,使其回避第二類奇異位形。
3.2 第二種反解模型下的理論工作空間
當(dāng)機(jī)構(gòu)工作在第二種反解模型時,在滿足約束方程(2)和<的前提下,4個極限圓圓心的位置關(guān)系也可以總結(jié)為以下兩種條件集合,見表2。
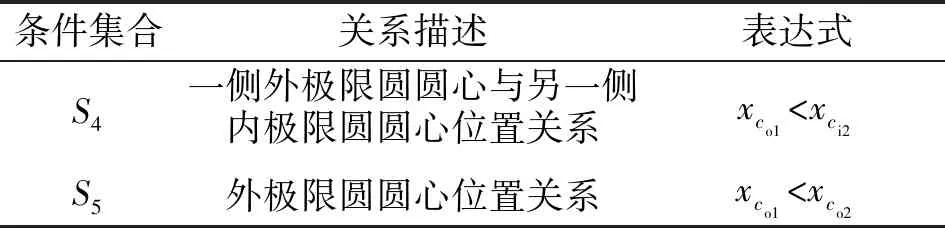
表2 第二種反解模型下極限圓位置關(guān)系條件

圖9 第二種反解模型下的理論工作空間
從圖9可以看出:在(a)和(b)兩種條件下,機(jī)構(gòu)在其工作空間中可能出現(xiàn)第一類奇異位形,但將不會出現(xiàn)第二類奇異位形;在條件(c)下,兩類奇異位形將都不會出現(xiàn)。
4 工作空間性能圖譜
工作空間是衡量平面二自由度并聯(lián)機(jī)構(gòu)工作性能的一項重要指標(biāo)。對比圖8和圖9中兩種反解模型下機(jī)構(gòu)的工作空間可以看出,在機(jī)構(gòu)總體尺寸相當(dāng)時,工作在第一種反解模型下的理論工作空間要明顯大于第二種反解模型,即機(jī)構(gòu)在第一種反解模型下的工作姿態(tài)更具有工程實用意義。因此,主要針對機(jī)構(gòu)在第一種反解模型下的工作空間進(jìn)行討論。
4.1 最大矩形工作空間
從圖8可以看出,平面二自由度并聯(lián)機(jī)構(gòu)的工作空間呈現(xiàn)不規(guī)則形狀。在實際運(yùn)用當(dāng)中,一般采用其內(nèi)接最大矩形工作空間作為衡量指標(biāo)。
對于圖8所示各種情況,工作空間內(nèi)接矩形面積的計算公式存在以下3種形式

(11)
=

(12)

(13)
對于圖8(a)和8(d),可按式(11)計算;對于圖8(c),可按式(12)計算;對于圖8(g),可按式(13)計算;對于圖8(b),其工作空間內(nèi)接矩形存在兩種形式,分別可按式(11)或(12)計算;對于圖8(e),其工作空間內(nèi)接矩形存在3種形式,分別可按式(11)、(12)或(13)計算;對于圖8(f),其工作空間內(nèi)接矩形也存在兩種形式,分別可按式(12)或(13)計算。
4.2 量綱一化參數(shù)模型
從上述機(jī)構(gòu)運(yùn)動學(xué)分析中可知,該平面二自由度并聯(lián)機(jī)構(gòu)的主要運(yùn)動學(xué)參數(shù)包括、、和,其中,影響機(jī)構(gòu)運(yùn)動學(xué)性能的獨(dú)立參數(shù)為、和-(在第一種反解模型中>)。由于這些參數(shù)的實際取值范圍為無窮空間,為便于在一個有限設(shè)計空間內(nèi)對所有參數(shù)情況進(jìn)行研究,采用一種量綱一化參數(shù)模型。通過下式可以將機(jī)構(gòu)獨(dú)立參數(shù)轉(zhuǎn)化為量綱一化參數(shù):
(14)
其中:
=++(-)
根據(jù)式(14)可知:
++=1
(15)
由機(jī)構(gòu)裝配約束條件及第一種反解模型的存在條件可知:
(16)
根據(jù)式(14)—(16)可以構(gòu)建出量綱一化自變量的有限設(shè)計空間,如圖10(a)中所示的△圍成的陰影面域。
進(jìn)一步假設(shè)
(17)
通過式(17)可將自變量設(shè)計空間內(nèi)任意一點(diǎn),由原先的-坐標(biāo)系轉(zhuǎn)化到-坐標(biāo)系內(nèi),從而使得對機(jī)構(gòu)的運(yùn)動學(xué)性能進(jìn)行平面圖譜表征成為可能,如圖10(b)所示。
圖10 量綱一化參數(shù)模型
4.3 性能圖譜
將量綱一化運(yùn)動學(xué)設(shè)計參數(shù)、和代入式(11)—(13),可以在圖10(b)所示坐標(biāo)系內(nèi),獲得最大矩形工作空間關(guān)于變換坐標(biāo)和的性能圖譜,如圖11所示。
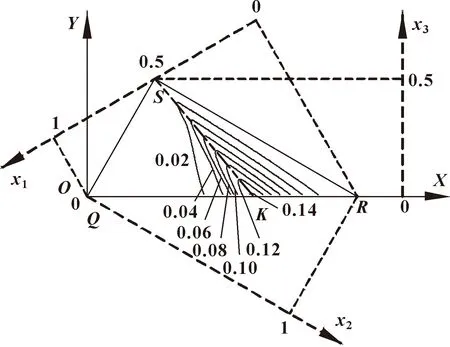
圖11 最大矩形工作空間性能圖譜
從圖11可以看出:最大矩形工作空間的等值曲線中存在一條明顯的脊線,并在脊線兩側(cè)沿正交方向逐漸減小;在脊線上沿方向最大矩形工作空間逐漸增大,其中點(diǎn)為峰值點(diǎn),其在-坐標(biāo)系內(nèi)的坐標(biāo)為(0.71,0),對應(yīng)的轉(zhuǎn)換前量綱一化參數(shù)分別為=0.385 1、=0.614 9、=0。即在機(jī)構(gòu)總體尺寸一定(為常數(shù))的情況下,當(dāng)=,且∶=0.385 1∶0.614 9時,機(jī)構(gòu)可獲得最大矩形工作空間。
5 結(jié)論
(1)本文作者提出的平面二自由度并聯(lián)機(jī)構(gòu)在運(yùn)動學(xué)上存在兩種反解模型,其中,第一種反解模型穩(wěn)定性較好。
(2)該機(jī)構(gòu)存在兩類運(yùn)動學(xué)奇異位形。當(dāng)機(jī)構(gòu)的動平臺、兩條運(yùn)動支鏈以及固定基座構(gòu)成平行四邊形結(jié)構(gòu)時出現(xiàn)第一類奇異位形,此時整體機(jī)構(gòu)將失去剛度;當(dāng)機(jī)構(gòu)兩條運(yùn)動支鏈處于水平狀態(tài)時出現(xiàn)第二類奇異位形,此時整體機(jī)構(gòu)將被鎖死。
(3)該機(jī)構(gòu)在第一種反解模型下,動平臺的理論工作空間存在7種形式;在第二種反解模型下,動平臺的理論工作空間存在3種形式。在機(jī)構(gòu)總體尺寸相當(dāng)?shù)那闆r下,第一種反解模型下的理論工作空間要大于第二種反解模型。
(4)利用量綱一化參數(shù)模型,可將機(jī)構(gòu)的運(yùn)動學(xué)參數(shù)的無限設(shè)計空間轉(zhuǎn)化到一個有限的面域內(nèi),并通過進(jìn)一步坐標(biāo)變換,能夠使用平面圖譜表征機(jī)構(gòu)運(yùn)動學(xué)性能的全局規(guī)律。
(5)借助平面性能圖譜,可以直觀指導(dǎo)運(yùn)動學(xué)參數(shù)優(yōu)化設(shè)計,以獲得機(jī)構(gòu)最大矩形工作空間。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19