六自由度肩關節康復機器人設計與仿真
2022-09-19 05:53:24張順程郭亮姜愛民
機床與液壓 2022年5期
張順程,郭亮,姜愛民
(1.中國科學院長春光學精密機械與物理研究所,空間機器人中心,吉林長春 130033;2.中國科學院大學,北京 100049)
0 前言
隨著全民健身時代的到來,出現了越來越多的運動損傷病例。運動康復的需求也與日俱增,其中面向肩關節運動損傷,迫切需要更科學、更有效的康復手段。傳統康復方式中存在訓練效率不高、精確度低與治療方案單一、康復評價指標不科學等現實問題,特別是無法實現運動能力的恢復與評估的問題,所以研制用于肩關節運動損傷康復的外骨骼機器人樣機非常重要。目前,國內外對上肢康復機器人有一定的研究。國外的研究起步較早,技術上有一定的積累,取得了諸多成果。比如GENTLE/S、ARMin系列、CADEN-7、Multi-Joint System、Armeo系列等,都已應用于人體的康復治療,取得了不錯的康復效果。相較于國外,國內的上肢康復機器人研究起步較晚。清華大學、哈爾濱工業大學、華中科技大學等都研制出了各自的康復機器人。隨著康復設備市場的發展,很多醫療器械公司也都研發出自己的產品,其中廣州一康公司的A6、A2最具有代表性。但大多都集中在上肢多關節集成,專門針對肩關節運動康復的設備很少。本文作者設計了一個多自由度肩關節康復訓練機器人,很好地解決了肩關節運動康復的訓練問題。文中詳細闡述了機器人的運動學建模及仿真問題,并進一步對工作空間進行了仿真,檢驗了機器人運動學方程推理的準確性及該方案的合理性。
1 機械系統設計
通過解剖學知識可知,由于肩關節結構復雜,為了方便研究,這里將肩關節運動簡化為3個正交運動,分別是屈伸/伸展、外展/內收、旋內/旋外(如圖1所示)。

圖1 肩關節運動示意
本文作者設計的六自由度外骨骼肩關節康復機器人可實現肩關節3個正交和復合運動。根據解剖學知識,得到肩關節運動角度。為了避免患者康復時受到二次傷害,機器人各關節活動范圍都小于肩關節正常活動范圍,如表1所示。

表1 機器人關節運動范圍
設計的肩關節外骨骼康復機器人機構簡圖如圖2所示。

圖2 肩關節康復機器人結構
機器人共有6個自由度,3個平動,3個轉動。3個旋轉自由度的軸線相交于一點,與肩關節的軸線和旋轉中心重合。L形機械臂通過旋轉運動,完成末端的位置調整。機器人末端和半圓環進行旋轉運動,可以分別實現肩關節的屈伸/伸展、外展/內收、旋內/旋外。整個機械臂可以進行上下移動,解決了肩關節瞬時旋轉中心瞬時可變性的問題,符合人體肩關節運動規律,并對不同患者身高進行高度調節。兩個滑臺可以對機器人的位置進行前后、左右調節,幫助機器人完成更加復雜的康復運動。
2 運動學分析
采用D-H法對機器人進行運動學分析。根據D-H參數表示方法,并基于本文作者設計的機器人三維模型,建立肩關節康復機器人的D-H坐標系。這里將機器人的運動學模型簡化為主要運動的三自由度模型,如圖3所示。

圖3 肩關節康復機器人D-H坐標系

(1)
它可由4×4矩陣表示為

(2)

(3)
康復機器人的D-H參數如表2所示。

表2 D-H參數
(6)
(7)
=+
=-
=
=-
=--
=-
=
=-
=+
=-
=-
(8)
式中:=sin,=cos。將===0°代入式(7)中得到:
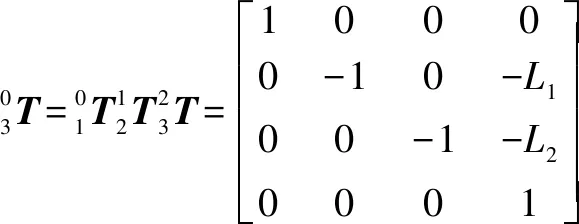
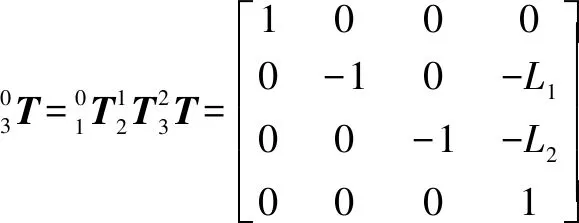
證明了正運動學運動方程的正確性。
3 機器人虛擬樣機仿真分析
在驗證了運動學公式的正確性后,通過ADAMS虛擬樣機技術,對康復機器人的虛擬樣機進行仿真,觀察康復機器人運動情況,測試康復機器人運行穩定性,然后通過后處理模塊的分析結果,對康復機器人機構進行優化改進。將UG軟件中建立好的三維模型導出為Parasolid文件,導入ADAMS中,對各個關節添加約束(JOINT)。設計一個多關節復合康復動作,使用STEP函數在各個關節添加驅動。通過ADAMS提供的Model Verify命令檢測模型定義是否正確,然后設置仿真時間為10 s,步長為400步,點擊仿真開始按鈕進行仿真。
仿真得到各關節角速度和輸出力矩,如圖4所示。可以看出:各關節角速度曲線平滑,運動平穩,沒有出現突變,關節輸出力矩也在電機選型范圍之內。

圖4 ADAMS仿真結果
4 機器人末端工作空間分析
機器人工作空間是衡量機器人康復水平的一個重要評價指標,是指機械臂末端能達到的所有空間位置的合集。運用蒙特卡洛法對機器人工作空間進行分析。蒙特卡洛法是基于概率統計理論的一種數值計算方法。利用MATLAB中的rand()函數對取值范圍內進行隨機抽取,機器人末端作為參考點,結合正運動學方程中得到的位置矢量,生成參考點的集合就是工作空間。其原理公式為

(9)
運用MATLAB中plot3和plot繪圖函數畫出機器人工作空間的三維云圖及平面云圖,如圖5所示。
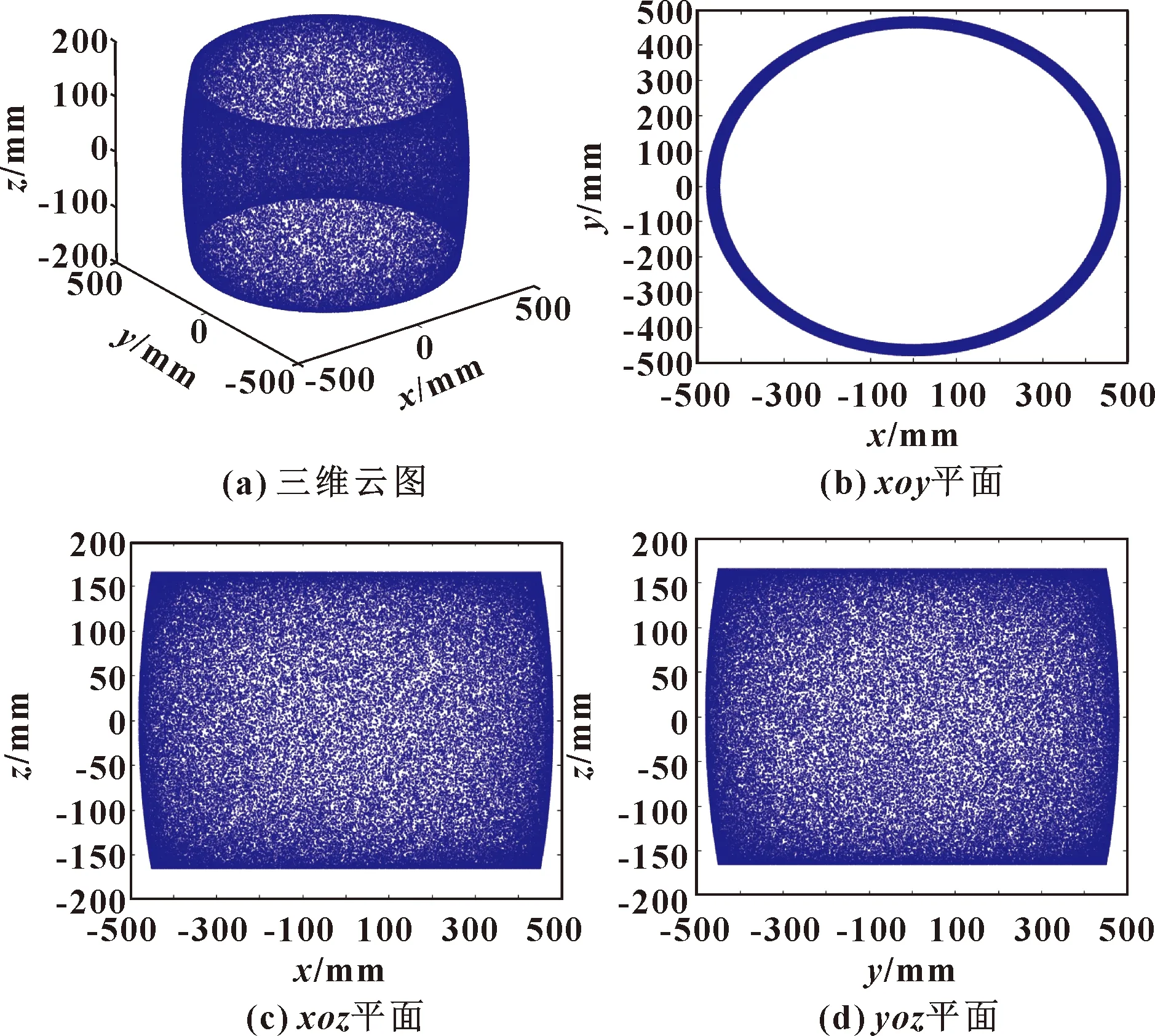
圖5 工作空間云點仿真
5 結束語
通過對人體解剖學的分析和肩關節的運動規律,設計了一種面向運動損傷的肩關節康復機器人。完成了對機器人樣機整體三維結構模型的設計;采用D-H法推導出機器人的運動學方程,并驗證了運動學方程的正確性。其次通過在ADAMS中進行運動學和動力學的仿真,得到結果顯示各關節運行平穩,沒有突變,各關節輸出力矩在選取電機范圍內。同時通過MATLAB軟件對工作空間進行仿真,驗證了本文作者設計的機器人模型方案的可行性和合理性。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
藝術啟蒙(2018年7期)2018-08-23 09:14:18
特別健康(2018年2期)2018-06-29 06:13:44
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:33:14