管道檢測機器人在垂直輸氣管道的運動分析
2022-09-19 06:03:00臧延旭趙宣楊博霖白港生姜海洋梁也梁雪婷
機床與液壓 2022年5期
關鍵詞:檢測
臧延旭,趙宣,楊博霖,白港生,姜海洋,梁也 ,梁雪婷
(1.北華航天工業學院機電工程學院,河北廊坊 065000;2.中國石油管道局工程有限公司技術服務中心,河北廊坊 065000;3.中油管道檢測技術有限責任公司,河北廊坊 065000)
0 前言
近期發布的《新時代的中國能源發展》白皮書指出中國的清潔能源消費總量正在穩步增加,占能源消費總量的比重達23.4%,相關人士預測在“十四五”期間我國將進一步加大非化石能源和天然氣的消費總量。目前幾乎100%的天然氣是利用長輸管道進行輸送的,因此,伴隨著天然氣消費總量的提升,用于天然氣輸送的管道建設也會進入一個新的高峰期。
長輸天然氣管道敷設在地下,由于腐蝕、外力破壞等原因可能造成管道發生金屬腐蝕、變形等損傷,存在較大的安全隱患。行業內普遍利用管道檢測機器人定期對管道進行內檢測作業,及時發現管道存在的腐蝕、變形等缺陷,為天然氣管道的安全輸送提供保障。
目前行業內成熟應用的管道檢測機器人主要基于漏磁檢測技術,要求機器人在管道內的最大運行速度不得超過5 m/s。機器人使用耐磨彈性橡膠或者聚氨酯材料實現密封,利用管道內輸送的天然氣提供運行動力,天然氣的流速決定了機器人的運行速度。在水平管道或者管道傾角很小的區域,機器人在管道內的運行速度較平穩,但在管道落差較大或者由于管道穿越而存在的垂直管段,由于自身重力原因將會影響機器人運行速度。而對機器人運動分析的研究多集中在水平管道狀態,針對山區起伏較大的管道,也主要利用有限元軟件分析機器人在自身重力作用下加速運行導致的對管道底部彎頭的沖擊作用,而對機器人在垂直輸氣管道內運動分析的理論研究還較匱乏。因此,建立機器人在垂直輸氣管道的運動模型,推導機器人在垂直管道內的運行速度和運行距離關系式,對于預測機器人運行速度是否滿足工業現場檢測要求具有重要意義。
1 管道檢測機器人受力平衡方程及影響因素分析
如圖1所示,管道檢測機器人進入管道后,由于彈性皮碗密封作用使機器人前后端建立壓差后隨輸送的氣體一起運行,管道檢測機器人在一定傾角的管道內運行時,其受力平衡方程為

(1)
式中:為機器人質量,kg;為機器人運行速度,m/s;為機器人后端瞬時壓力,Pa;為機器人前端瞬時壓力,Pa;為管道內截面積,m;為管道傾角,(°);為機器人運行阻力,N。
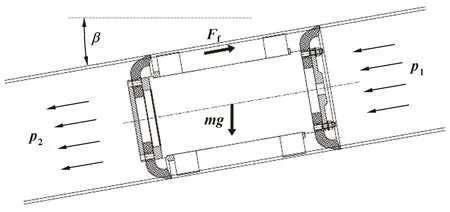
圖1 管道檢測機器人受力分析示意
由式(1)可知,機器人的運行狀態與機器人自重、管道傾角、管道輸送氣體參數、機器人與管道接觸等因素有關:(1)機器人自重。一定口徑的機器人自重為一定值,一方面自重影響機器人與管壁的接觸狀態,另一方面當管道處于一定傾角狀態時,自重會產生相應的分力。(2)運行阻力。機器人運行阻力包括機器人自身與管內壁接觸產生的摩擦力,還取決于管道內雜質類型和雜質量,對于漏磁檢測機器人還包括磁路裝置與管道間的磁力。由于接觸力和磁力的精確理論計算較困難,對不同口徑的管道機器人采用牽拉試驗的方法進行運行阻力測試,測試結果表明:相同管道壁厚、機器人運行速度不超過5 m/s時,其運行阻力基本不變,且不同口徑的機器人運行阻力集中在0.05~0.2 MPa內。(3)管道氣體參數。氣體的輸量和壓力決定了機器人的運行速度,也決定了機器人的驅動力。(4)管道傾角。管道存在較大傾角時,重力的分力會對機器人運行狀態產生明顯影響,尤其對于垂直管道的工況,機器人的自重將產生額外動力驅動機器人加速運動。
所以,對于一定口徑的機器人,當管道氣體參數、管道壁厚等參數不變時,機器人由水平管道進入垂直管道后,由于機器人自重原因,機器人將做加速運動。
2 管道機器人在垂直輸氣管道的運動分析
由于重點研究機器人在垂直輸氣管道的運動規律,為簡化分析模型做出以下設定:(1)氣體為理想氣體;(2)管道內氣體為單相介質,牛頓流體;(3)管道直徑、壁厚不變,忽略雜質的影響,即機器人在垂直管道的運行阻力為定值;(4)垂直管道足夠長,機器人能加速至最大運行速度;(5)管道氣體絕熱恒溫;(6)忽略機器人長度的影響。
2.1 機器人受力分析
如圖2所示,機器人進入垂直管道后,先不考慮自重的影響,則機器人在Δ(增量很微小)時間內運行至虛線所示位置,但由于自重的加速作用,實際在Δ時間內機器人運行至實線所示位置,機器人速度增加了Δ,運行距離增加了Δ。此過程中,機器人對前端氣體產生壓縮作用,而后端氣體則會膨脹,受擾動的機器人前后端氣體的距離為Δ(擾動波以聲速傳播),擾動波前氣體仍以穩定狀態運行,波后氣體處于擾動狀態,擾動區域內氣體的壓力、密度和速度均有微小改變。
分別以機器人前后端受擾動的氣體為研究對象(作為控制體),根據動量守恒定律,列出擾動的這部分氣體在d時間前和d時間后的動量守恒關系式。
機器人前端氣體:

(2)
機器人后端氣體:

(3)
式中:為機器人后端氣體密度,kg/m;為機器人前端氣體密度,kg/m;為擾動波傳播速度,m/s。動量守恒關系式中,左側第一項為通過控制體表面動量變化,左側第二項為控制體內氣體動量變化(其中d=d),右側為控制體內氣體所受外力。整理得:
Δ=2Δ
(4)
Δ=2Δ
(5)
對于理想氣體:

(6)
式中:為絕熱指數;為氣體常數,J/(kg·K);為溫度,K。則機器人由于加速運動導致的受力增量為

(7)
由式(7)可知,機器人由于加速運行導致的壓差增量Δ與氣體的密度/壓力、擾動波傳播速度和機器人的速度增量Δ等因素有關,當壓差增量Δ與面積的乘積與自重平衡時,機器人速度增量達最大值。
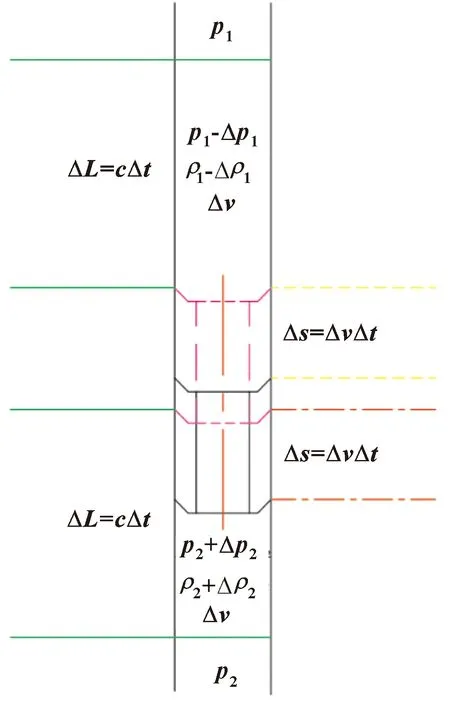
圖2 機器人在垂直管道的運行分析簡圖
以上受力分析是針對機器人在垂直管道向下運行時的狀態,根據式(7)可提前預測機器人向下運行時的最大增速值。同樣,當機器人在垂直管道向上運行時,借鑒以上分析過程可知,機器人由于自重影響將做減速運行,機器人前端氣體膨脹而后端氣體壓縮,機器人由于減速運動導致的受力增量與式(7)相同,只不過此時機器人前端氣體的壓力、密度和速度均有微小減小,后端則是微小增加,與垂直向下運行的狀態正好相反。同時,在垂直管道向上運行階段的初始壓力與,與垂直管道向下運行階段的初始壓力相比略有增加,這是由于垂直管道氣體自身重力的影響。利用式(7)可預測機器人向上運行時的最大減速值,減速過程雖不會導致機器人速度過快而影響檢測數據質量,但減速值過大可能導致機器人停止運行問題的發生。一旦機器人停止運行,后端氣體會繼續壓縮增壓,直至機器人在一較大壓差作用下快速啟動,以超過氣體流速的速度沖過垂直管道,有可能使機器人超速導致檢測數據質量不佳,甚至會對管道造成較大的破壞沖擊力。
2.2 機器人加速運行階段的運行距離分析
如圖2所示,當機器人在垂直管道向下加速運行時,機器人雖然加速運行,但其加速度并非常數,由于加速作用導致的壓差增量逐步增加,且與機器人重力加速度方向相反,機器人加速度會逐漸減小。將式(7)代入式(1),整理得:
=-Δ
(8)
式中:為機器人加速度,m/s。式(8)可進一步整理為

(9)
=e-[2(+)]
(10)
d=

(11)
式中:d為機器人加速運行距離,m;為機器人初始運行速度,與氣體流速相同,m/s。由式(10)和式(11)可知,加速度快速衰減,機器人加速運行距離是加速度和時間的函數。
3 運動方程與數值仿真結果對比
文獻[13]中建立了清管器通過“U形”管道的模型,模型所用仿真參數如表1所示。
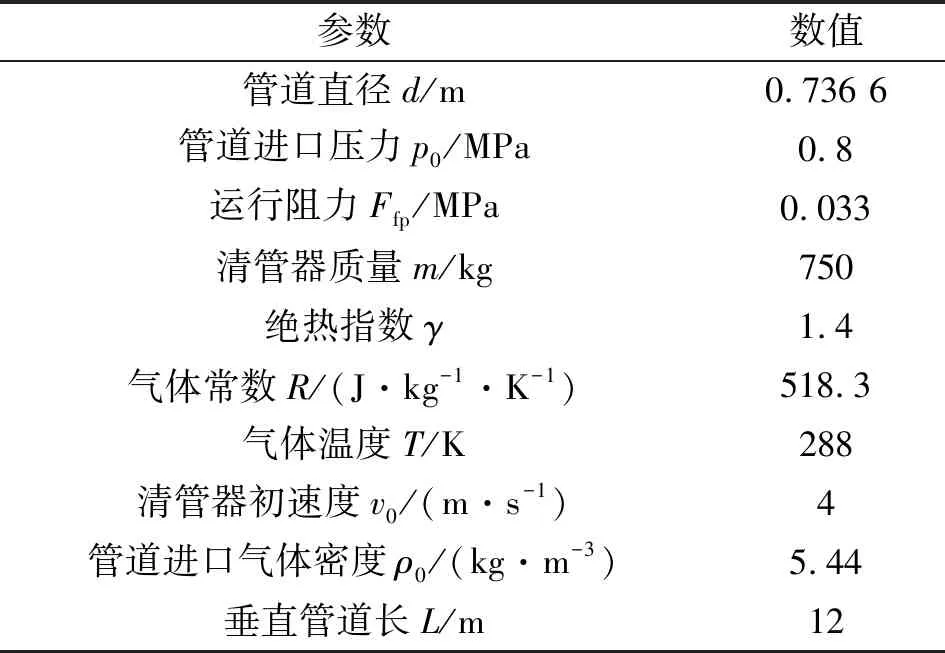
表1 仿真參數
利用式(7)計算清管器在垂直管道運行時的速度增量:

即清管器最大運行速度為=+Δ=5.83 m/s。文獻[13]中仿真結果如圖3所示(仿真初始條件為進口壓力恒定,出口流速恒定):清管器在垂直管道內向下運行時(前12 m運行距離),最大運行速度約為5.8 m/s,且運行速度呈周期性波動,振幅越來越小。計算的最大運行速度值與數值仿真結果基本一致。
圖3 清管器運行速度仿真結果[13]
利用式(10)計算清管器加速度減為0時所需時間(以e為底數的指數函數開始衰減迅速,取減小至初始加速度值的5%時的時間值作為計算結果),當/=0.05時,=0.55 s,即清管器加速時間約為0.55 s。利用式(11)計算在0.55 s時間內,清管器的運行距離,得d=2.22 m。與圖3仿真結果對比(仿真初始條件為進口壓力恒定,出口流速恒定):清管器在垂直管道內向下運行時(前12 m運行距離),當清管器運行速度第一次達最大速度值時約運行0.5 s,運行距離約為2.5 m,計算的時間和距離與仿真結果接近。
利用式(10)和式(11)計算清管器達最大運行速度時運行的時間和距離,在工業現場應用是不方便的。由于計算時取減小至初始加速度值的5%時的時間值作為計算結果,式(10)和式(11)可分別用以下關系式進行計算:
(12)
(13)

4 結論
利用動量守恒定律建立了管道檢測機器人在垂直輸氣管道向下運行時壓力增量與速度增量間的關系式,利用該關系式可計算管道檢測機器人通過垂直輸氣管道時的最大運行速度,以此判斷機器人最大運行速度是否超過允許值。同時利用建立的速度增量關系式也可以判斷機器人在垂直輸氣管道向上運行時的速度減小量,可判斷機器人是否存在停止運行的風險。建立了機器人在垂直管道向下運行時的運行距離關系式,并對關系式進行了簡化,適用于工業現場預測機器人增速運行距離。建立的關系式與數值仿真結果進行了對比,最大運行速度與仿真結果非常接近,機器人加速階段的運行距離與仿真結果也相近。
由于機器人在工業現場運行時,在進入垂直管道前需要通過連接水平管道和垂直管道的彎頭,機器人在彎頭處的受力、密封情況較復雜,后續還應根據工業現場實際情況對建立的關系式進行修正,同時對關系式的適用范圍(如氣體的輸量、壓力等參數對運行結果的影響)也需進一步研究。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48