繩驅(qū)超冗余機(jī)械臂結(jié)構(gòu)設(shè)計(jì)與力學(xué)分析
2022-09-19 05:53:22耿浩郭忠峰
機(jī)床與液壓 2022年5期
耿浩,郭忠峰
(沈陽(yáng)工業(yè)大學(xué),遼寧省智能制造與工業(yè)機(jī)器人重點(diǎn)實(shí)驗(yàn)室,遼寧沈陽(yáng)110870)
0 前言
傳統(tǒng)工業(yè)機(jī)械臂在一些狹小的非結(jié)構(gòu)化空間內(nèi)進(jìn)行作業(yè)非常困難,而超冗余機(jī)械臂作為一種特種機(jī)械臂,其關(guān)節(jié)空間維度遠(yuǎn)多于任務(wù)空間維度,能夠滿足作業(yè)時(shí)的位姿要求,廣泛應(yīng)用于對(duì)航空航天、核電站等非結(jié)構(gòu)化的復(fù)雜狹窄空間進(jìn)行探測(cè)、檢修、救援等作業(yè)。
英國(guó)OC機(jī)器人公司研制的超冗余機(jī)械臂已經(jīng)廣泛應(yīng)用在核電站、飛機(jī)裝配等商業(yè)領(lǐng)域。劉天亮在2016年研制了一款超冗余機(jī)械臂,主要由10個(gè)連桿構(gòu)成,具有20個(gè)自由度,運(yùn)行非常靈活。符海明于2018年研制了一款混合驅(qū)動(dòng)的超冗余機(jī)械臂,其結(jié)構(gòu)主要采用了“離散式剛性連桿+聯(lián)動(dòng)機(jī)構(gòu)+繩索”的主動(dòng)-被動(dòng)混合驅(qū)動(dòng)形式。湯磊等人在2016年研制的一款繩驅(qū)動(dòng)超冗余機(jī)械臂具有24個(gè)自由度,驅(qū)動(dòng)部分繩索與機(jī)械臂繩索的排布處于相同的位置,具有較高的傳動(dòng)效率。
本文作者在相關(guān)學(xué)者研究的基礎(chǔ)上對(duì)超冗余機(jī)械臂進(jìn)行機(jī)械結(jié)構(gòu)改進(jìn)并進(jìn)行力學(xué)分析,在根部關(guān)節(jié)加裝由電機(jī)-絲杠控制的可伸縮連桿,使機(jī)械臂整體能夠沿水平方向移動(dòng);在每個(gè)連桿的繩索孔中加入滑輪以降低繩索與連桿的摩擦;對(duì)繩索受力進(jìn)行仿真和理論計(jì)算,對(duì)受力最大的關(guān)節(jié)進(jìn)行強(qiáng)度校核。
1 機(jī)械臂結(jié)構(gòu)設(shè)計(jì)
1.1 機(jī)械臂整體結(jié)構(gòu)設(shè)計(jì)
機(jī)械臂的整體結(jié)構(gòu)如圖1所示,主要由驅(qū)動(dòng)部分與機(jī)械臂組成。機(jī)械臂從根部開(kāi)始依次為伸縮桿、關(guān)節(jié)和連桿。驅(qū)動(dòng)部分主要由電機(jī)與傳動(dòng)機(jī)構(gòu)組成。每個(gè)連桿端部圓周方向均勻分布小孔用于通過(guò)繩索,通過(guò)后置驅(qū)動(dòng)電機(jī)帶動(dòng)繩索拉伸從而控制連桿的偏轉(zhuǎn)角度。

圖1 機(jī)械臂整體結(jié)構(gòu)
1.2 驅(qū)動(dòng)部分設(shè)計(jì)
驅(qū)動(dòng)部分包含4個(gè)驅(qū)動(dòng)層,其中,第1、2、4層分別有5個(gè)驅(qū)動(dòng)繩索電機(jī),如圖2所示;第3層則有3個(gè)驅(qū)動(dòng)繩索電機(jī)及1個(gè)驅(qū)動(dòng)伸縮桿電機(jī)。

圖2 驅(qū)動(dòng)部分單層結(jié)構(gòu)示意
單層驅(qū)動(dòng)部分如圖2所示,由電機(jī)控制絲桿的水平運(yùn)動(dòng)來(lái)驅(qū)動(dòng)繩索拉伸,在絲桿的滑塊上有一壓線裝置,其作用是通過(guò)調(diào)整壓板把繩索壓緊,外部軟管作為繩索的導(dǎo)向回路,與端蓋中繩索分布的18個(gè)小孔相連。
1.3 機(jī)械臂設(shè)計(jì)
機(jī)械臂由1個(gè)伸縮桿與5個(gè)連桿組成,連桿間通過(guò)萬(wàn)向節(jié)連接,伸縮桿位于機(jī)械臂根部,可使機(jī)械臂具有水平方向的自由度。每個(gè)連桿長(zhǎng)為140 mm、直徑為60 mm,2個(gè)連桿之間距離為16 mm,伸縮桿可伸出的最大長(zhǎng)度為150 mm。當(dāng)伸縮桿完全伸出時(shí),機(jī)械臂最大可伸展長(zhǎng)度為1 135 mm。為減小機(jī)械臂的整體質(zhì)量,關(guān)節(jié)采用高強(qiáng)度鋁合金7050-T7451。
機(jī)械臂連桿連接如圖3所示。

圖3 連桿連接示意
圖4所示為單個(gè)連桿剖視圖,單個(gè)連桿主要由2個(gè)端盤與1個(gè)空心筒體組成,在端盤與中心筒體周圍分布穿繩孔,孔內(nèi)裝有2個(gè)滑輪,繩索穿過(guò)2個(gè)滑輪,減少繩索與連桿之間的摩擦,提高了繩索的壽命。

圖4 單個(gè)連桿剖視圖
機(jī)械臂伸縮桿剖視圖如圖5所示,通過(guò)電機(jī)-絲桿連接到伸縮桿的螺紋孔,從而控制伸縮桿的水平移動(dòng)。伸縮桿前端由2個(gè)蓋板與滑輪組成,通過(guò)螺栓連接。

圖5 伸縮桿剖視圖
2 機(jī)械臂靜力學(xué)分析
2.1 機(jī)械臂瞬態(tài)分析
通過(guò)ADAMS對(duì)機(jī)械臂進(jìn)行瞬態(tài)分析,可以分析機(jī)械臂動(dòng)態(tài)受力變化情況。對(duì)機(jī)械臂末端2個(gè)關(guān)節(jié)進(jìn)行分析,機(jī)械臂的ADAMS模型如圖6所示。
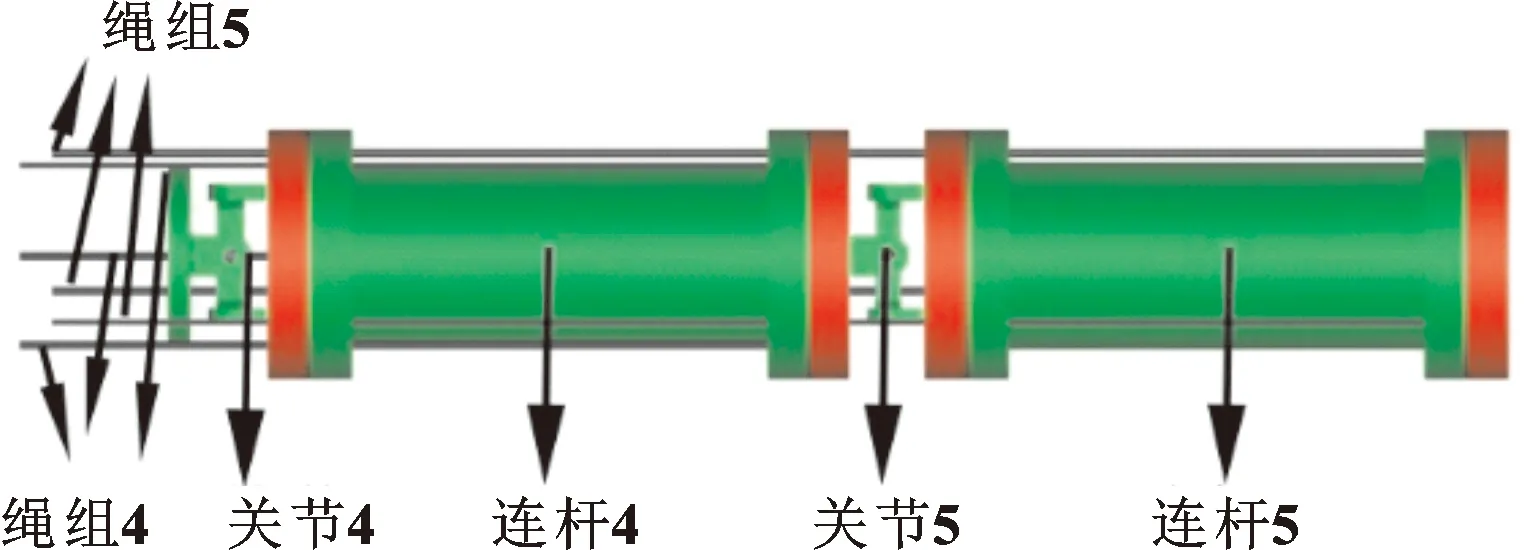
圖6 超冗余機(jī)械臂運(yùn)動(dòng)學(xué)模型
機(jī)器臂瞬態(tài)分析的難點(diǎn)在于對(duì)繩索的仿真,本文作者采用對(duì)柱狀體添加軸套力的方法來(lái)模擬繩索。在仿真時(shí)繩索的一端與關(guān)節(jié)端部固定,另一端與大地固定。在機(jī)械臂端部添加與重力方向一致的外力,為一個(gè)隨時(shí)間變化的二次方的函數(shù)力,變化范圍為0~20 N,用時(shí)5 s,步數(shù)為2 000步,對(duì)機(jī)械臂進(jìn)行仿真。
繩組4與繩組5的受力情況分別如圖7、圖8所示。
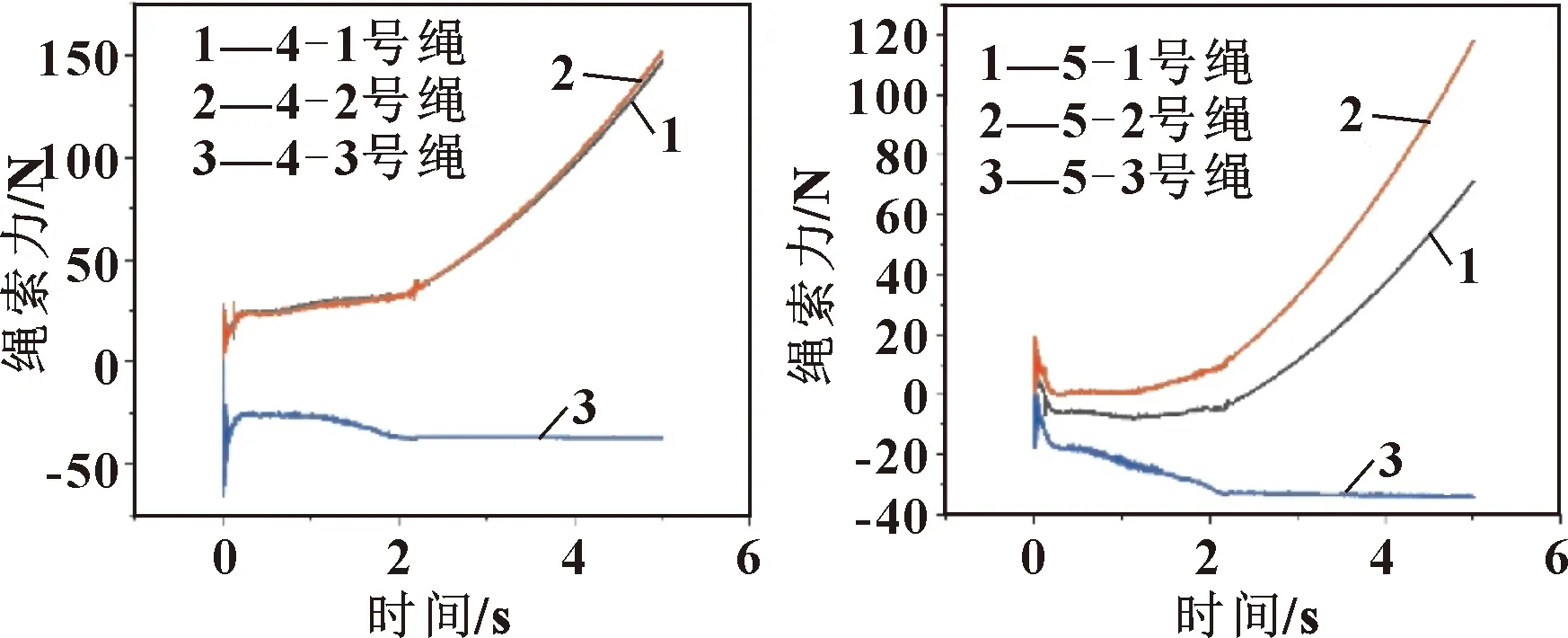
圖7 繩組4受力情況 圖8 繩組5受力情況
由圖7、圖8可知:前2 s內(nèi)繩索的受力情況不穩(wěn)定,2 s后繩索受力隨著時(shí)間的變化呈一個(gè)穩(wěn)定上升與穩(wěn)定下降的趨勢(shì),其中繩子受拉為正,受壓為負(fù)。4-1、4-2、4-3、5-1、5-2、5-3號(hào)繩在第5 s時(shí)受到的作用力分別為147.6、152.1、-36.44、71.2、117.9、-33.99 N。
2個(gè)關(guān)節(jié)受力情況分別如圖9、圖10所示。

圖9 關(guān)節(jié)4受力情況 圖10 關(guān)節(jié)5受力情況
由圖9、圖10可知:前2 s關(guān)節(jié)受力處于不穩(wěn)定狀態(tài),2 s后隨著時(shí)間的變化關(guān)節(jié)受力穩(wěn)定上升;關(guān)節(jié)4在第5 s時(shí)受到的力為418 N,關(guān)節(jié)4受力加起來(lái)為418.37 N;關(guān)節(jié)5在第5 s時(shí)受力為156 N,3根繩索受力加起來(lái)為155.2 N,各個(gè)關(guān)節(jié)的受力約等于各個(gè)繩索對(duì)其產(chǎn)生的拉力。
2.2 機(jī)械臂繩索受力分析
通過(guò)力矩平衡理論來(lái)分析機(jī)械臂各關(guān)節(jié)在不同的旋轉(zhuǎn)角度下繩索所受到的力的大小,以驗(yàn)證仿真結(jié)果,并進(jìn)一步了解機(jī)械臂各關(guān)節(jié)在各狀態(tài)下繩索的受力狀況。單個(gè)關(guān)節(jié)旋轉(zhuǎn)時(shí)繩索的分布情況如圖11、圖12所示。
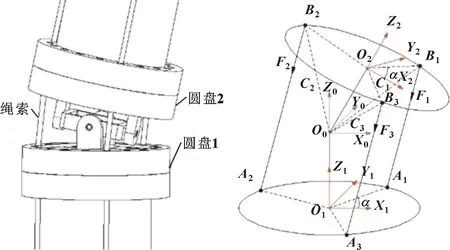
圖11 單關(guān)節(jié)示意 圖12 單關(guān)節(jié)簡(jiǎn)化圖
點(diǎn)受到3根繩索的力以及外力(包括重力負(fù)載以及經(jīng)過(guò)此關(guān)節(jié)的其他繩索)所施加的力矩,對(duì)點(diǎn)求矩。首先計(jì)算此關(guān)節(jié)的3根繩索對(duì)點(diǎn)的力矩,計(jì)算公式如式(1)所示:
=×=[1,1,1]
=×=[2,2,2]
=×=[3,3,3]
(1)
其中:、、分別為3根繩子所受到的力,為矢量;、、分別為3根繩子力的作用點(diǎn)到旋轉(zhuǎn)中心的距離矢量;為各個(gè)繩索對(duì)關(guān)節(jié)中心的力矩。

(2)
式中:c為cos;s為sin。
繩子到點(diǎn)的為式(3)—式(5):
(3)

(4)
(5)
式中:為繩子在圓盤中力的作用點(diǎn)到圓盤中心的距離;為繩子力的作用點(diǎn)相對(duì)于圓盤坐標(biāo)系軸的夾角,其中連桿5的為10°,從連桿4到伸縮桿繩索分布的分別為30°、50°、70°、90°、110°,如圖13所示。

圖13 繩索布線示意
單個(gè)關(guān)節(jié)中每根繩子所受的拉力為
(6)
(7)
(8)
式中:為最終要求的繩索力,為標(biāo)量,那么最終計(jì)算出來(lái)的便是一個(gè)有方向與大小的矢量。
那么3個(gè)繩子對(duì)關(guān)節(jié)在與軸的合力矩為式(9):
=,1+,2+,3
=,1+,2+,3
(9)
關(guān)節(jié)除了受到3根繩子的力外,還會(huì)受到經(jīng)過(guò)該關(guān)節(jié)的其他繩索對(duì)該關(guān)節(jié)的力矩,以及重力與負(fù)載所產(chǎn)生的力矩,計(jì)算方法依然為力的作用點(diǎn)去叉乘力對(duì)關(guān)節(jié)的力臂,并把所產(chǎn)生的力矩分解到軸與軸,分別為,e與,e。那么依照力矩平衡原理可以得出公式(10):

(10)
在計(jì)算時(shí),先從端部關(guān)節(jié)往末端關(guān)節(jié)進(jìn)行遞推計(jì)算。由于繩子只能受拉力并不能受到壓力,在計(jì)算時(shí)按照以下方法進(jìn)行計(jì)算:
(1)對(duì)于一個(gè)關(guān)節(jié)的3根繩索力,先設(shè)置一個(gè)繩索力為0;
(2)計(jì)算其余2根繩索的受力;
(3)找到受力最小的繩索并設(shè)置其大小為0.1 N,使得繩索有一定的預(yù)緊力;
(4)計(jì)算出其余繩索的受力。
與之前ADAMS瞬態(tài)分析得到的繩索力進(jìn)行比較,結(jié)果列于表1、表2。存在誤差的原因?yàn)锳DAMS仿真時(shí)繩子要設(shè)置質(zhì)量,所用的鋁合金材料與計(jì)算時(shí)的材料密度、質(zhì)量等存在一定誤差。

表1 關(guān)節(jié)4繩索受力對(duì)比

表2 關(guān)節(jié)5繩索受力對(duì)比
3 機(jī)械臂關(guān)鍵部件校核
當(dāng)機(jī)械臂水平時(shí),機(jī)械臂根部關(guān)節(jié)所受的力矩最大,故需校核機(jī)械臂水平時(shí)根部關(guān)節(jié)的強(qiáng)度。此機(jī)械臂的材料選用高強(qiáng)度鋁合金7050-T7451,其屈服強(qiáng)度為470 MPa。
當(dāng)機(jī)械臂水平時(shí),各個(gè)關(guān)節(jié)的角與角為0時(shí),各個(gè)繩索受力情況如圖14所示。
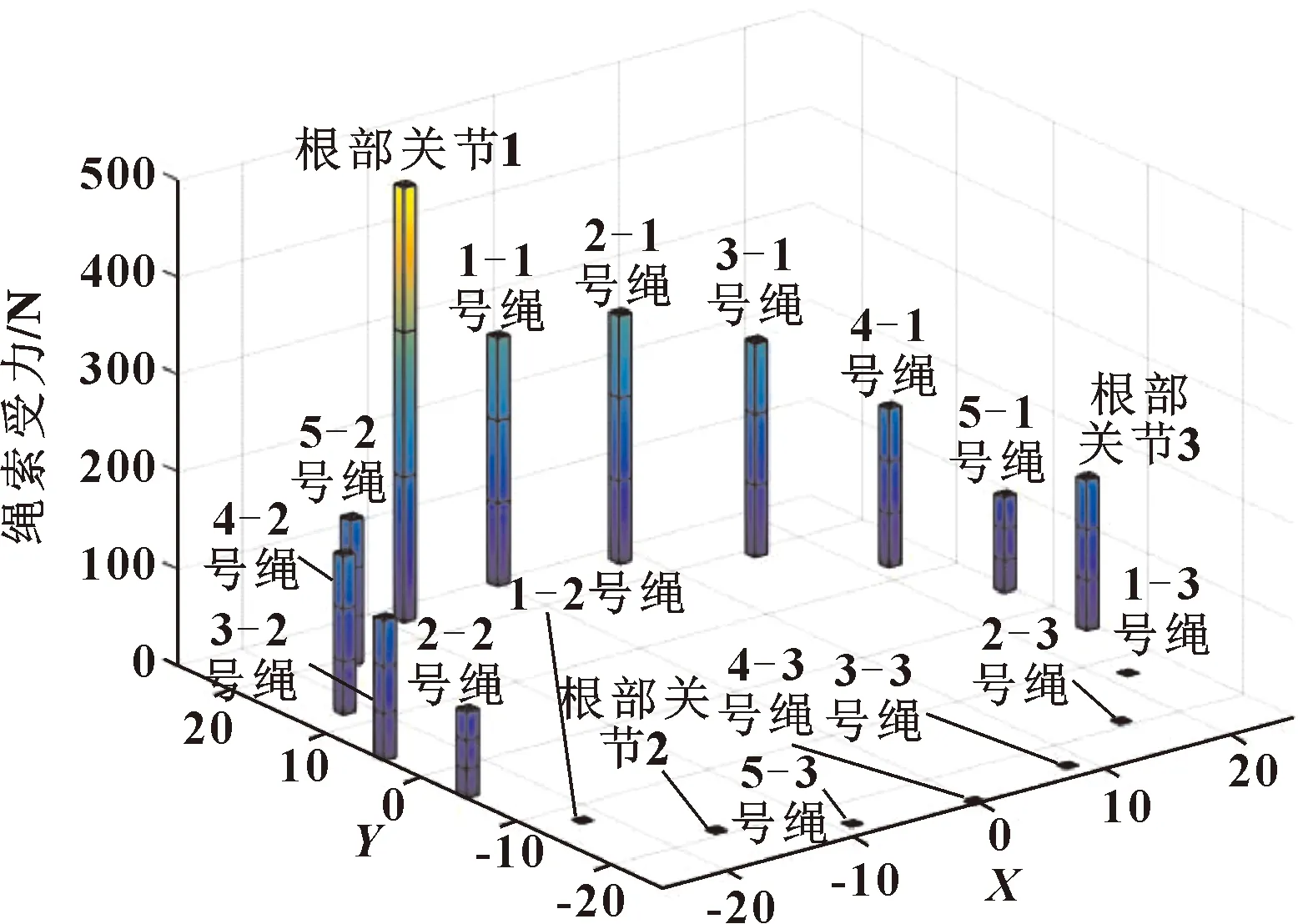
圖14 整個(gè)機(jī)械臂水平時(shí)各繩索受力情況
通過(guò)ANSYS Workbench分析伸縮桿關(guān)節(jié)處的應(yīng)力狀況,根部關(guān)節(jié)受到的力為前端所有繩索的拉力,又由于計(jì)算出伸縮桿處關(guān)節(jié)在水平方向繩索的總拉力為1 613.24 N,取安全系數(shù)為1.8,那么在連桿端面施加3 000 N的力,端面面積為1 071.21 mm,所以需要施加2.8 MPa的壓力,之后進(jìn)行求解,其應(yīng)力云圖如圖15所示。
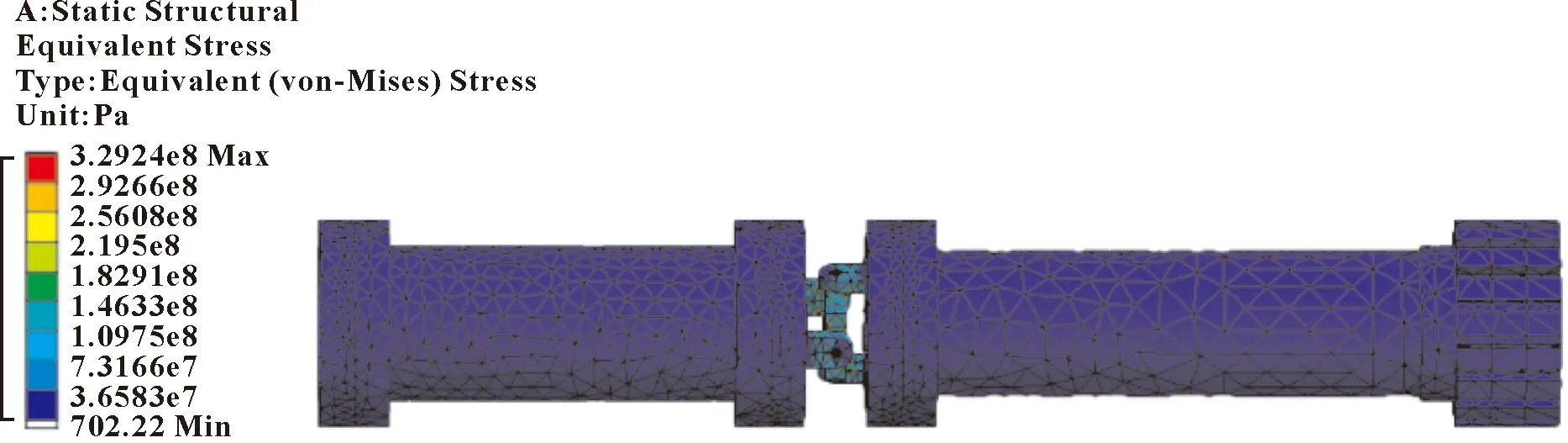
圖15 機(jī)械臂應(yīng)力云圖
由圖15可知:最大應(yīng)力發(fā)生在萬(wàn)向節(jié)與中空十字軸的連接處,關(guān)節(jié)的最大應(yīng)力約為329 MPa,而7050-T7451鋁合金所能承受的最大應(yīng)力為470 MPa,故所選材料在安全范圍內(nèi)。
4 結(jié)論
(1)對(duì)超冗余機(jī)械臂進(jìn)行了機(jī)械結(jié)構(gòu)改進(jìn),在機(jī)械臂根部關(guān)節(jié)加裝了可伸縮連桿,使得機(jī)械臂具有水平方向移動(dòng)的自由度,并且在每根連桿的繩索孔內(nèi)加裝了滑輪,減小了繩索與機(jī)械臂之間的摩擦,提高了繩索使用壽命。
(2)推導(dǎo)了機(jī)械臂的各個(gè)關(guān)節(jié)在任意角度下各繩索受力的計(jì)算方法。運(yùn)用ADAMS對(duì)機(jī)械臂進(jìn)行了瞬態(tài)分析,并用力矩平衡的計(jì)算方法驗(yàn)證了ADAMS的仿真結(jié)果。
(3)通過(guò)靜力學(xué)分析得出機(jī)械臂受力最大的關(guān)節(jié)為根部關(guān)節(jié),所以對(duì)根部關(guān)節(jié)進(jìn)行有限元分析,結(jié)果表明所設(shè)計(jì)的機(jī)械臂符合強(qiáng)度要求。
猜你喜歡
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
電腦報(bào)(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電腦報(bào)(2019年40期)2019-09-10 07:22:44
電子制作(2018年18期)2018-11-14 01:48:24
小溪流(畫(huà)刊)(2017年12期)2018-01-10 16:07:29
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
兒童故事畫(huà)報(bào)·發(fā)現(xiàn)號(hào)趣味百科(2015年12期)2016-01-25 00:41:49
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44