基于模糊PID控制的電液比例閥控缸系統(tǒng)泄漏補償研究
2022-09-19 06:57:18董明鑫孔祥臻
機床與液壓 2022年16期
董明鑫,孔祥臻
(山東交通學院工程機械學院,山東濟南 250357)
0 前言
長期以來,液壓缸泄漏的問題一直阻礙著液壓技術的應用和發(fā)展,特別是近幾年人類面臨著環(huán)境污染和能源短缺的巨大挑戰(zhàn)。防止液壓缸泄漏使液壓系統(tǒng)能夠有更好的工作效率,已經(jīng)是迫在眉睫的重大技術問題,這主要包括以下2個方面:既要防止外界環(huán)境對系統(tǒng)的侵害,又要防止油液泄漏對外界環(huán)境造成污染。對此,劉琥鋮等提出了一種基于深度置信網(wǎng)絡模型在液壓缸內(nèi)泄漏故障診斷中具有更高的診斷精度的方法;廖輝和喬東凱對液壓缸泄漏故障診斷的方法進行相關研究,可以比較準確地預測液壓缸泄漏的程度;楊敏等人優(yōu)化了液壓缸組合密封性能及密封圈的組成結(jié)構(gòu)參數(shù);高峰等人分析了直驅(qū)泵控電液伺服系統(tǒng),提出了泄漏補償保壓的方法。液壓缸泄漏的危害具體表現(xiàn)在以下幾個方面:使液壓系統(tǒng)效率降低,油液溫度變高,造成惡性循環(huán)的泄漏問題;使系統(tǒng)壓力不穩(wěn)定,造成執(zhí)行機構(gòu)響應速度出現(xiàn)波動,不能滿足系統(tǒng)控制要求,嚴重時會造成系統(tǒng)故障影響系統(tǒng)穩(wěn)定性;造成油液浪費,污染環(huán)境,甚至會引發(fā)火災事故。因此,進一步研究分析液壓缸泄漏對液壓系統(tǒng)的影響具有重要的意義。
目前,電液比例閥控缸系統(tǒng)作為電液比例控制系統(tǒng)的一個重要應用,已經(jīng)被廣泛應用于工業(yè)、農(nóng)業(yè)、軍事等領域。隨著電液比例技術的進步和比例閥設計技術的發(fā)展完善,在一定程度上改進了比例閥內(nèi)部結(jié)構(gòu)設計,并且在系統(tǒng)中引入如壓力、流量、位移負反饋等方式,使得電液比例閥控缸系統(tǒng)的穩(wěn)定性、響應速度和控制精度較之前有明顯的提高。周山旭等分析了2個液壓缸同步控制時的響應特性。然而,閥控缸系統(tǒng)液壓缸泄漏以及比例閥的死區(qū)非線性特性等問題,一直是液壓界努力解決的問題之一。黃武濤等提出狀態(tài)反饋法能夠建立線性的系統(tǒng)模型,使子空間辨識法可以對泄漏故障進行診斷,精確地辨識出每一處泄漏系數(shù)估計值;陳立娟等分析了先導式電液比例閥非線性位置自適應補償控制,提高先導式電液比例閥的位置控制性能;馬立瑞得出了管道長度和內(nèi)徑對閥控對稱缸液壓系統(tǒng)快速性與穩(wěn)定性的影響;胡小青和張博強提出了基于簡化模型的閥控液壓缸活塞運動速度控制方法,對液壓缸活塞運動速度進行準確的控制。
本文作者通過研究閥控缸系統(tǒng)考慮液壓缸泄漏與不考慮泄漏進行聯(lián)合仿真對比,由于系統(tǒng)中液壓缸是存在泄漏的,為了確保系統(tǒng)能夠正常工作,需對該系統(tǒng)進行補償。針對閥控缸系統(tǒng)存在的問題設計了模糊PID控制器,得到液壓缸活塞位移與泄漏量之間的關系以及對系統(tǒng)性能的影響規(guī)律,與傳統(tǒng)PID控制器進行仿真實驗對比;再通過聯(lián)合仿真研究后,驗證了模糊PID控制器在解決系統(tǒng)死區(qū)影響、液壓缸泄漏等問題中具有良好的效果。
1 電液比例閥控缸系統(tǒng)
隨著比例閥設計技術的完善,為了使電液比例閥控缸系統(tǒng)可以更好地控制穩(wěn)態(tài)精度和動態(tài)響應,電液比例閥逐漸替代傳統(tǒng)的液壓閥作為系統(tǒng)主控元件。然而,系統(tǒng)中液壓缸的泄漏對執(zhí)行元件性能的影響難以估量,這也在一定程度上使系統(tǒng)的應用受到了限制。經(jīng)研究發(fā)現(xiàn),在對電液比例閥控缸系統(tǒng)建模仿真實驗分析過程中,大多數(shù)研究者沒有考慮系統(tǒng)元件泄漏對系統(tǒng)性能穩(wěn)定性的影響。文中依據(jù)電液比例閥控缸系統(tǒng)的工作原理,利用AMESim仿真平臺的液壓庫與HCD庫建立系統(tǒng)仿真模型,不考慮液壓缸泄漏的電液比例閥控缸系統(tǒng)及組成如圖1所示。
針對圖1所示電液比例閥控缸系統(tǒng)模型,在2個活塞模塊中間加入1個泄漏模塊,以此來模擬液壓缸的泄漏流量。改進后的考慮液壓缸泄漏的電液比例閥控缸系統(tǒng)及組成如圖2所示。

圖1 不考慮泄漏的電液比例閥控缸系統(tǒng)模型 圖2 考慮泄漏的電液比例閥控缸系統(tǒng)模型
2 電液比例閥控缸系統(tǒng)數(shù)學模型
2.1 閉環(huán)電液比例控制系統(tǒng)結(jié)構(gòu)
如圖3所示,閉環(huán)電液比例控制系統(tǒng)上位機將信號給到控制器,控制器將控制信號傳給比例電磁鐵,此時,電液比例閥的閥口大小由電信號的大小來進行調(diào)節(jié),從而輸出液壓油推動液壓缸活塞工作,液壓缸的工作位移再由位移傳感器反饋到系統(tǒng)上位機,將其與輸入的信號進行比較,得出的信號就是偏差信號。信號再次由比例放大器放大后輸出給比例電磁鐵,以此來調(diào)節(jié)比例閥的閥芯,從而控制閥口油液的方向和流量大小,實現(xiàn)對液壓缸位移的精確控制。
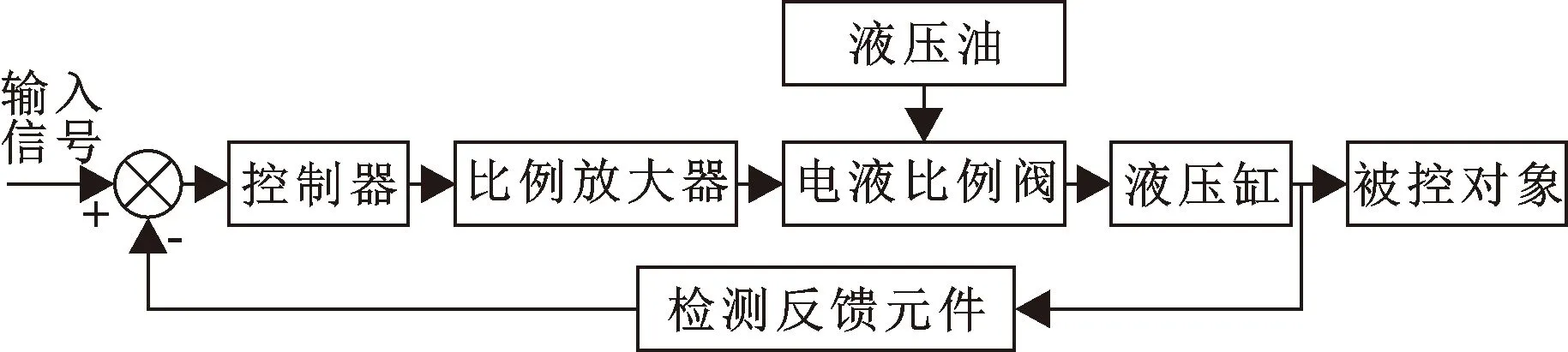
圖3 閉環(huán)電液比例控制系統(tǒng)結(jié)構(gòu)
2.2 電液比例閥控缸
為方便研究討論,假定管道完好無損,在同一管路內(nèi)的壓力不變;恒壓油源供油,回油壓力=0;油的溫度和密度為常數(shù)。閥控液壓缸系統(tǒng)結(jié)構(gòu)原理如圖4所示。
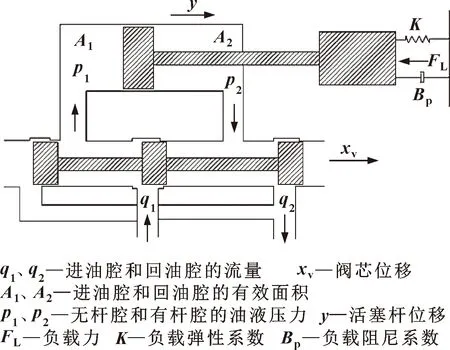
圖4 閥控液壓缸系統(tǒng)結(jié)構(gòu)簡圖
2.3 系統(tǒng)數(shù)學模型
在運用實際算法控制之前,理論的分析和支持是必不可少的,能夠更好地理解整個系統(tǒng)的動態(tài)性能和穩(wěn)定性。為此建立閥控缸系統(tǒng)各個環(huán)節(jié)的數(shù)學模型,運用從局部到整體的邏輯,最終得出整個閥控缸系統(tǒng)的數(shù)學模型。
2.3.1 比例放大器數(shù)學模型
比例放大器具有將較小的信號進行放大的作用,以此來提高帶載能力,從而驅(qū)動比例流量閥工作。因此,可由一個比例環(huán)節(jié)代替比例放大器,其數(shù)學模型為
(1)
式中:為比例增益,A/V;為輸出電流,A;為輸入電壓,V。
2.3.2 位移傳感器數(shù)學模型
可以將位移傳感器的輸出電壓信號和位移信號近似看作是一個比例環(huán)節(jié),輸出的反饋信號形式為電壓信號,其數(shù)學模型為
(2)
式中:為位移反饋電壓信號,V;為液壓缸活塞桿位移,m;為位移傳感器的轉(zhuǎn)換系數(shù),V/m。
2.3.3 比例流量閥數(shù)學模型
比例流量閥在不考慮死區(qū)特性的情況下可以將它看作一個二階環(huán)節(jié),其數(shù)學模型為
(3)
式中:為比例流量閥閥芯位移,m;為比例放大器輸出電流,A;為比例電磁鐵的增益系數(shù),m/A;為比例電磁鐵的固有頻率,rad/s;為比例電磁鐵的阻尼比。
2.3.4 負載流量線性化方程
當活塞桿伸出時,由進油腔流量和回油腔流量的流量方程分析可知:負載流量是關于閥芯位移和負載壓力的函數(shù),將它進行線性化處理,只考慮初始條件的變化量,化簡去掉增量符號,得到最終的負載流量線性化方程為
=-
(4)

2.3.5 滑閥的流量方程
在分析系統(tǒng)液壓缸連續(xù)性方程的時候,不考慮油液質(zhì)量以及油液管道內(nèi)的摩擦損失、管道動態(tài)的影響,系統(tǒng)流量連續(xù)性方程如下所示:

(5)
式中:Σ為流入控制腔的流量總和,m/s;Σ為流出控制腔的流量總和,m/s;為液壓缸腔內(nèi)容積,m;為液壓缸腔內(nèi)壓力,Pa;為油液的彈性模量,N/m。
泄漏流量(均為層流)包括內(nèi)泄漏和外泄漏。內(nèi)泄漏是油液由高壓側(cè)向低壓側(cè)泄漏,為兩腔的壓差與內(nèi)泄漏系數(shù)的乘積,此時所泄漏的油液對外不做功;外泄漏是油液從高壓側(cè)直接流至外界,不僅造成功率損耗,而且損耗油液、污染環(huán)境,其值與高壓側(cè)的壓力以及外泄漏系數(shù)有關。得到液壓缸進油、回油腔的流量連續(xù)性方程如下所示:
(6)
式中:、分別為內(nèi)腔、外腔的泄漏系數(shù),m/(N·s);、分別為進油腔、回油腔的容積,m;為液壓油的彈性系數(shù),MPa。
由式(6)可得負載流量另一種表達式如下所示:

(7)
2.3.6 力平衡方程
由牛頓定律可知:在不考慮庫侖摩擦力和油液的質(zhì)量等因素對系統(tǒng)的影響時,可將活塞桿與負載看作一個整體進行分析,得出力平衡方程如下所示:

(8)
式中:為液壓缸輸出力,N;為等效到活塞上的質(zhì)量,kg;為活塞及負載的黏性阻尼系數(shù),N·s/m;為負載的彈簧剛度,N/m;為液壓缸外負載力,N。
2.3.7 閥控缸的數(shù)學模型
取式(4)、(7)、(8)的增量形式,將其進行拉普拉斯變換得:
(9)
(10)
只考慮閥芯位移為輸出量時,得出液壓缸環(huán)節(jié)的傳遞函數(shù)為
(11)
只考慮外負載時,得出該環(huán)節(jié)的傳遞函數(shù)為
(12)
2.4 電液比例閥控缸系統(tǒng)數(shù)學模型
結(jié)合電液比例閥控缸系統(tǒng)的原理圖,以及建立的各個環(huán)節(jié)數(shù)學模型,得到如圖5所示的閥控缸系統(tǒng)傳遞函數(shù)方框。

圖5 電液比例閥控缸系統(tǒng)傳遞函數(shù)
3 自適應模糊PID控制器設計
模糊PID控制系統(tǒng)將跟蹤誤差和誤差變化作為系統(tǒng)輸入。在模糊PID控制中,最重要的是確定PID的3個參數(shù),即比例系數(shù)、積分作用系數(shù)和微分作用系數(shù),與和之間的模糊關系,在運行中不斷檢測和,根據(jù)模糊控制原理對3個參數(shù)進行在線修改,從而實現(xiàn)不同和時對參數(shù)自整定的要求,使被控對象有良好的動、靜態(tài)性能。模糊PID控制器的結(jié)構(gòu)如圖6所示。
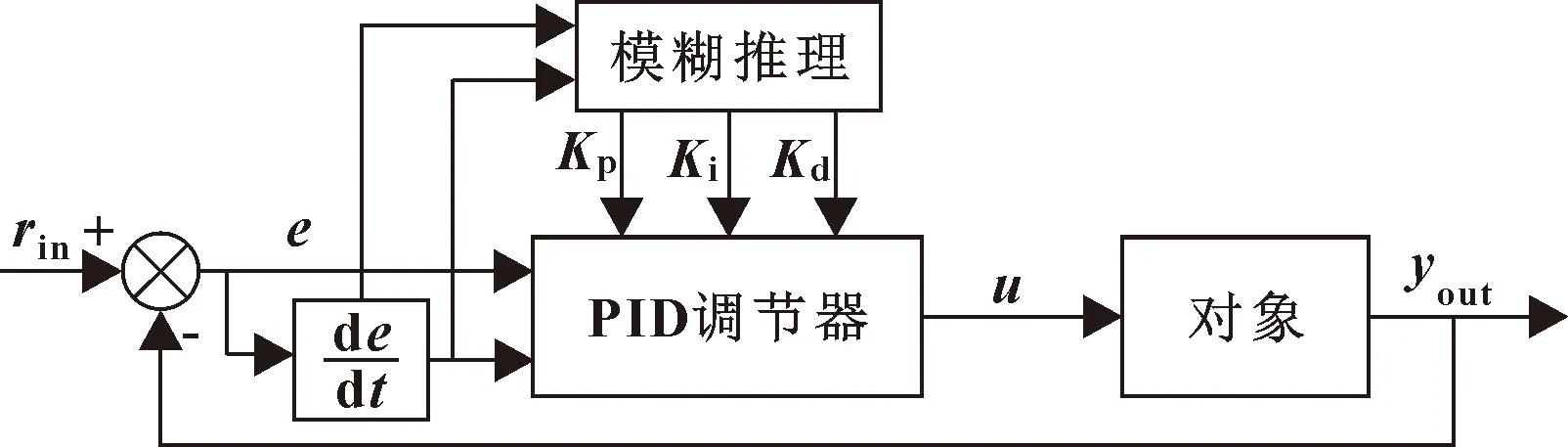
圖6 自適應模糊PID控制器結(jié)構(gòu)
由圖5電液比例閥控缸系統(tǒng)傳遞函數(shù)框圖可得開環(huán)傳遞函數(shù)式(13),將相應參數(shù)代入式(13)得到一組初始PID參數(shù)。
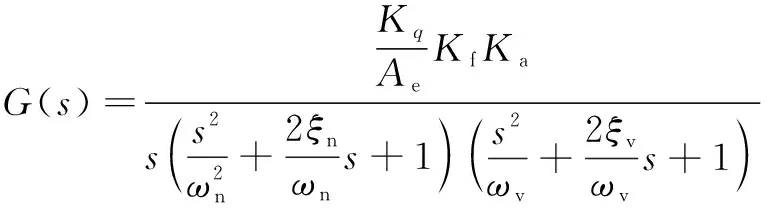
(13)
根據(jù)模糊PID控制規(guī)律設計模糊控制器的規(guī)則時,將、、、、由7個模糊集代替:NB(負大)、NM(負中)、NS(負小)、ZO(零)、PS(正小)、PM(正中)及PB(正大),即模糊子集為{NB,NM,NS,ZO,PS,PM,PB}。取相應的論域為{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。基于PID參數(shù)對系統(tǒng)輸出特性的影響情況,可總結(jié)出系統(tǒng)在被控過程中,對應于不同的偏差和偏差變化率參數(shù)時,PID參數(shù)的自整定原則,建立合適的、、參數(shù)的模糊規(guī)則。模糊規(guī)則表動態(tài)仿真如圖7所示。

圖7 模糊規(guī)則表動態(tài)仿真圖
4 閥控缸系統(tǒng)仿真分析
4.1 閥控缸系統(tǒng)基本參數(shù)
系統(tǒng)基本參數(shù)設置如表1所示。
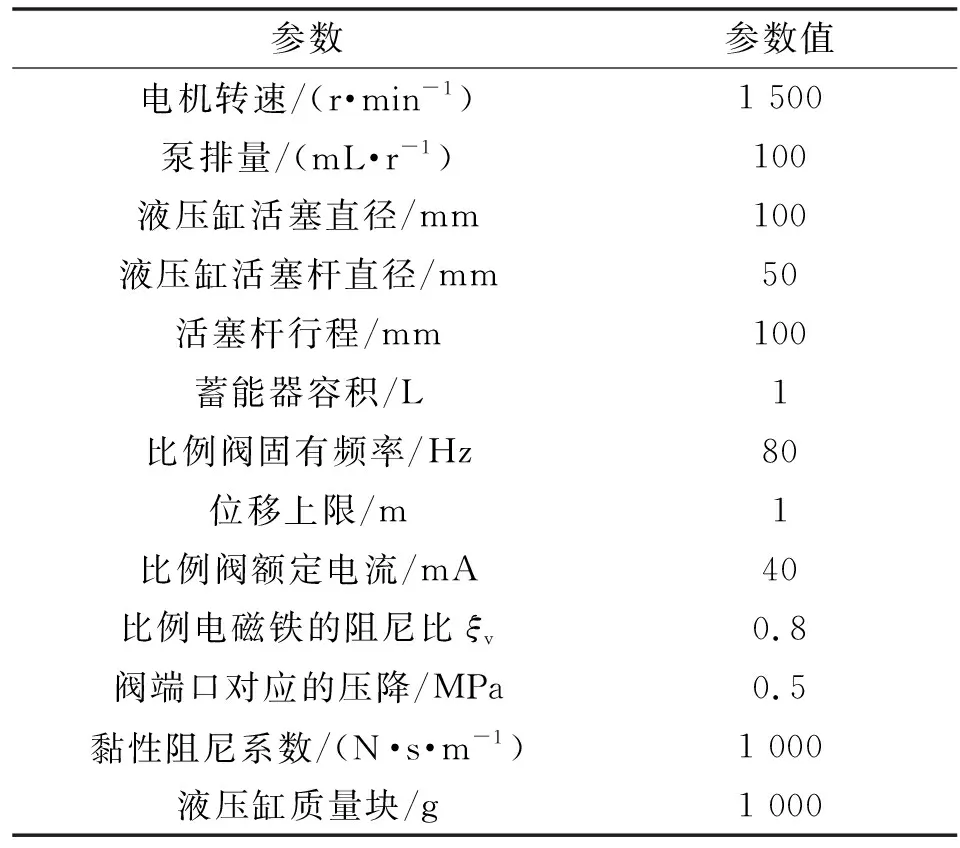
表1 系統(tǒng)基本參數(shù)設置
4.2 AMESim-Simulink聯(lián)合仿真模型
利用AMESim仿真平臺建立閥控缸系統(tǒng)的聯(lián)合仿真模型,設置Simulink聯(lián)合仿真接口,建立的閥控缸系統(tǒng)聯(lián)合仿真模型如圖8、圖9所示,在Simulink仿真平臺建立傳統(tǒng)PID聯(lián)合仿真框圖如圖10所示。
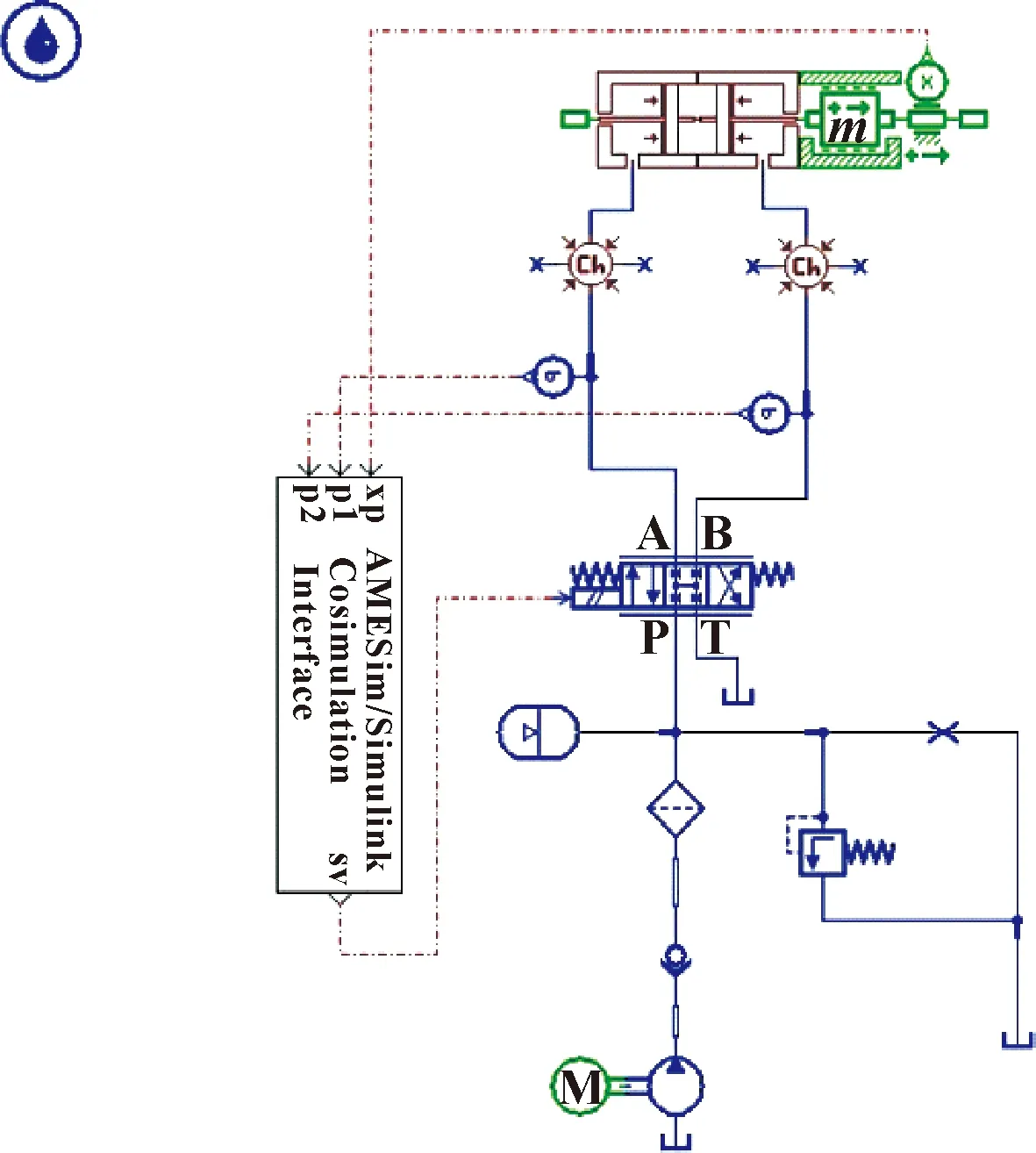
圖8 不考慮泄漏的閥控缸聯(lián)合仿真圖
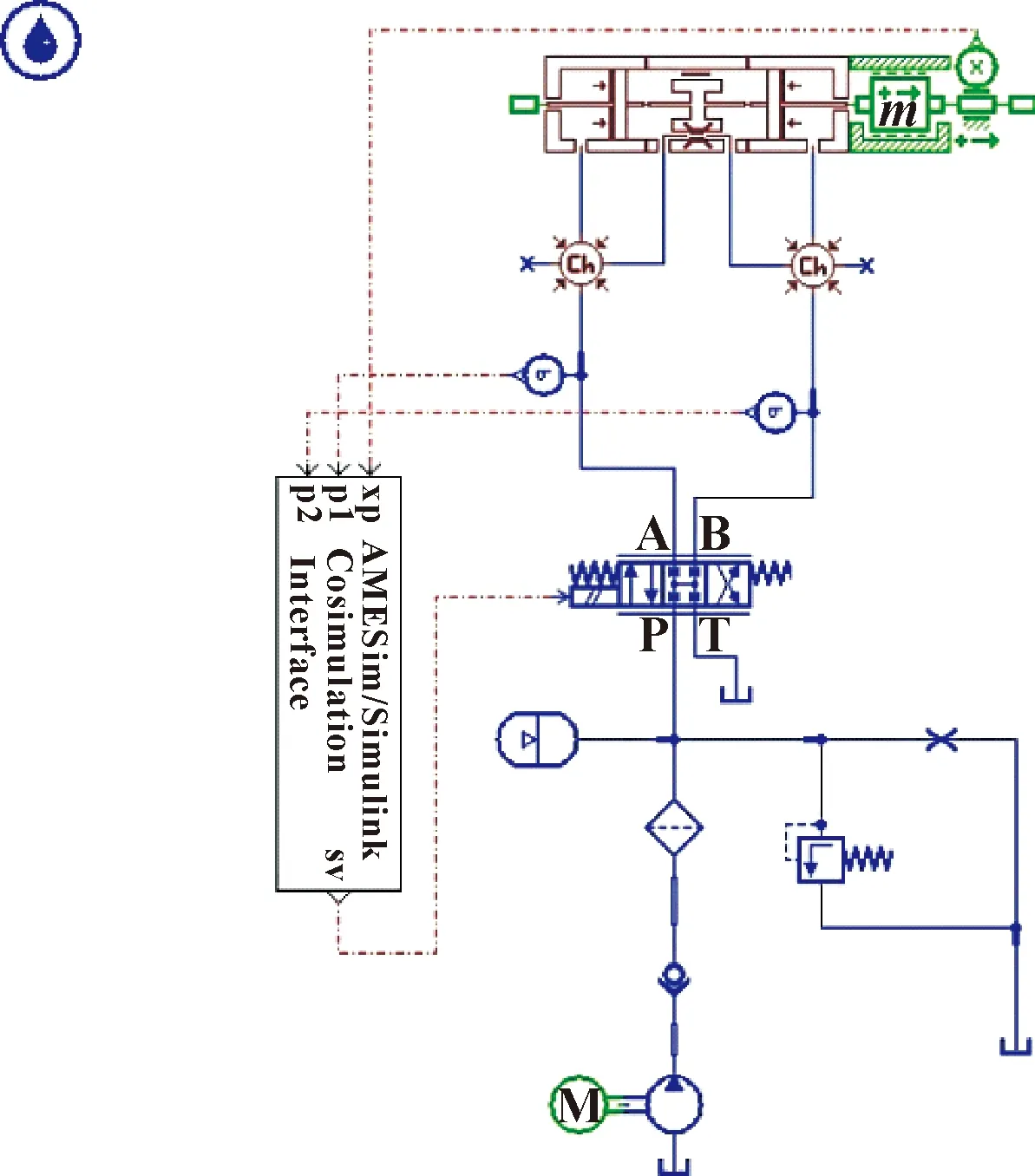
圖9 考慮泄漏的閥控缸聯(lián)合仿真圖
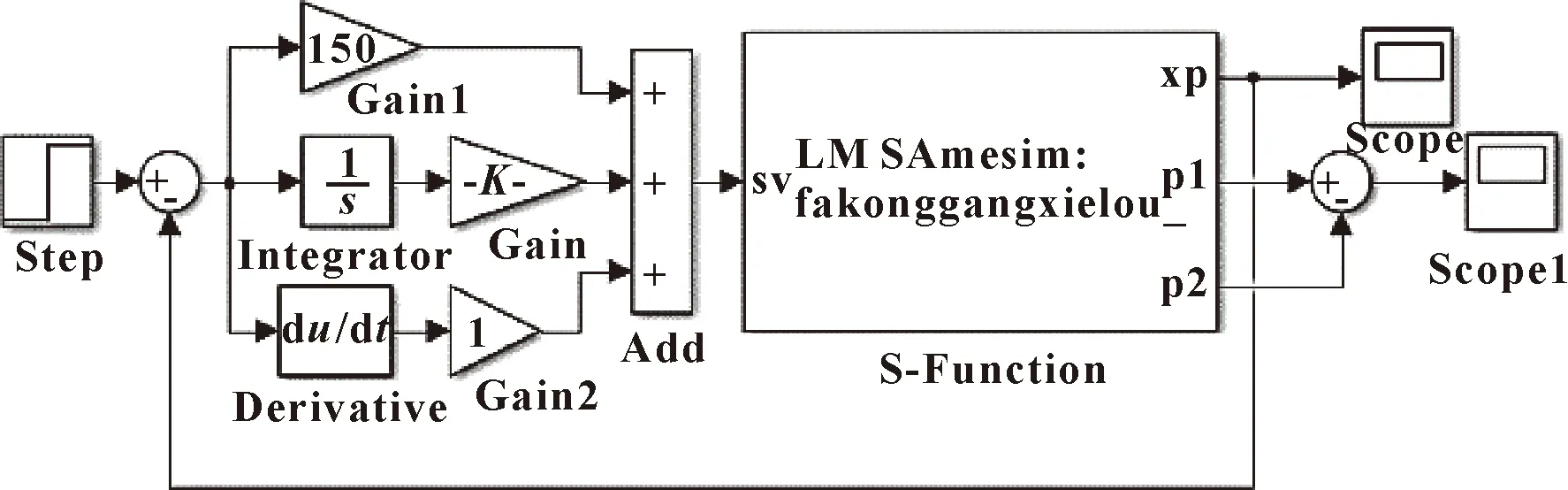
圖10 考慮泄漏時基于PID控制的Simulink聯(lián)合仿真框圖
將模糊PID控制策略導入系統(tǒng)中,分別輸入階躍信號和正弦信號進行聯(lián)合仿真,在Simulink仿真平臺建立模糊PID控制的聯(lián)合仿真框圖如圖11所示。
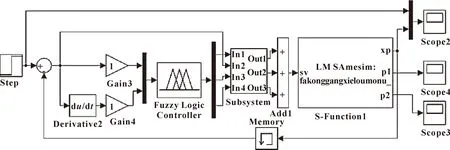
圖11 考慮泄漏時模糊PID控制的Simulink聯(lián)合仿真框圖
4.3 仿真分析
4.3.1 傳統(tǒng)PID控制仿真分析
在同等工況下,給定系統(tǒng)一個延時1 s的階躍信號,使液壓缸跟蹤階躍信號,對不考慮泄漏和考慮泄漏的系統(tǒng)分別進行仿真實驗,得到PID控制的仿真位移曲線如圖12所示。可以看出:電液比例閥控缸系統(tǒng)不考慮泄漏時的液壓缸位移跟隨時間為12.74 s;考慮液壓缸泄漏時相比不考慮泄漏時,因泄漏油液的潤滑作用可以使系統(tǒng)工作更加平穩(wěn),然而其響應速度慢,位移跟隨時間為16.28 s,相對于不考慮泄漏時響應速度慢了3.54 s,達不到系統(tǒng)預期的工作要求。
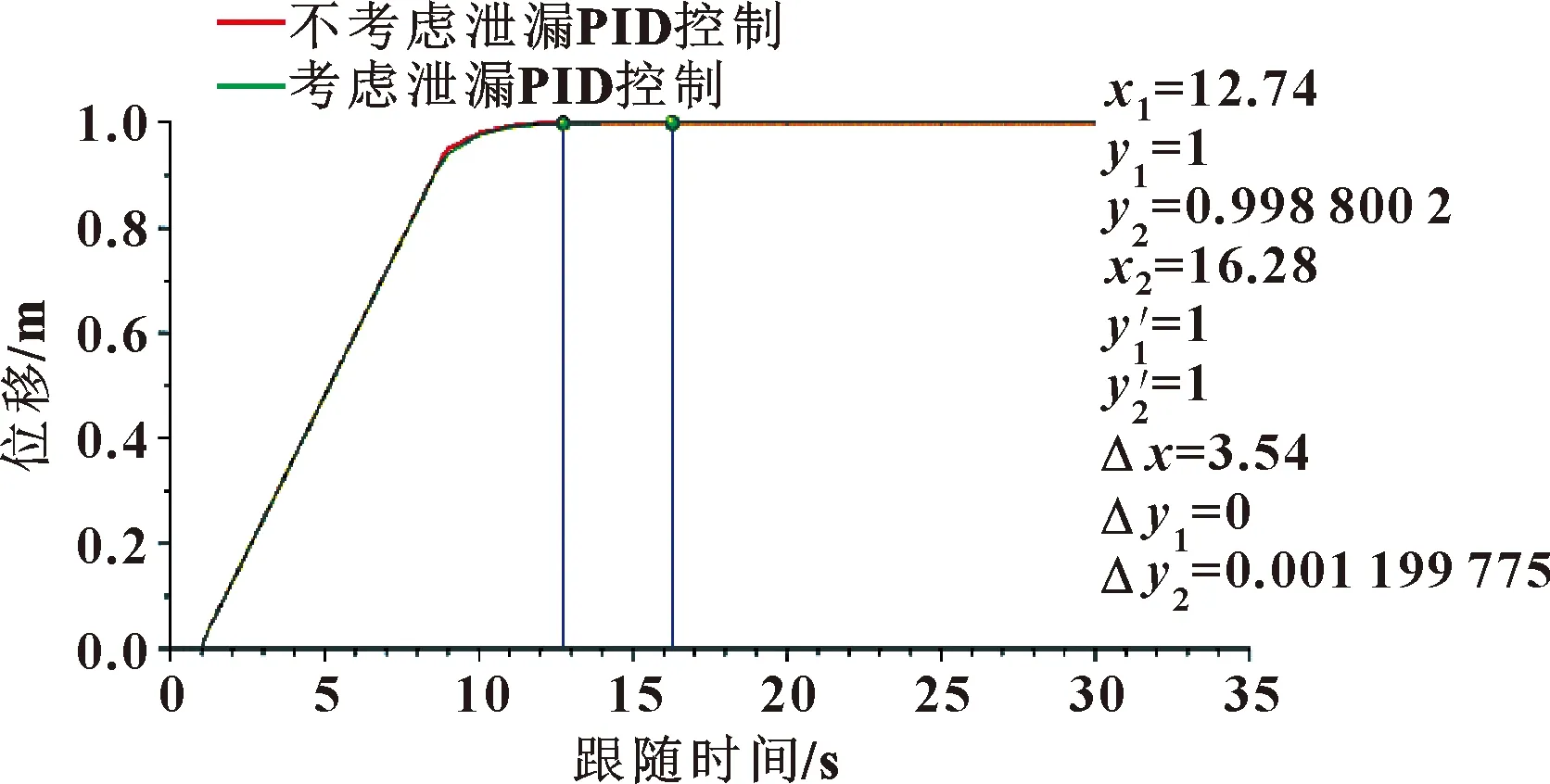
圖12 考慮泄漏與不考慮泄漏的PID位移曲線
4.3.2 模糊PID控制仿真分析
設計模糊PID控制器來提高閥控缸系統(tǒng)的響應速度,在同等工況下,對不考慮泄漏和考慮泄漏的系統(tǒng)分別進行模糊PID控制聯(lián)合仿真實驗,仿真結(jié)果如圖13、圖14所示。由圖13、圖14仿真曲線可知:在采用模糊PID控制策略后,不考慮泄漏的系統(tǒng)活塞位移量的跟隨時間為10.18 s,響應速度與傳統(tǒng)的PID控制器相比快了2.56 s;考慮泄漏時系統(tǒng)活塞位移量的跟隨時間為10.22 s,響應速度與傳統(tǒng)的PID控制器相比快了6.06 s,系統(tǒng)控制效果有了顯著的提高,系統(tǒng)無振蕩也無超調(diào)量。
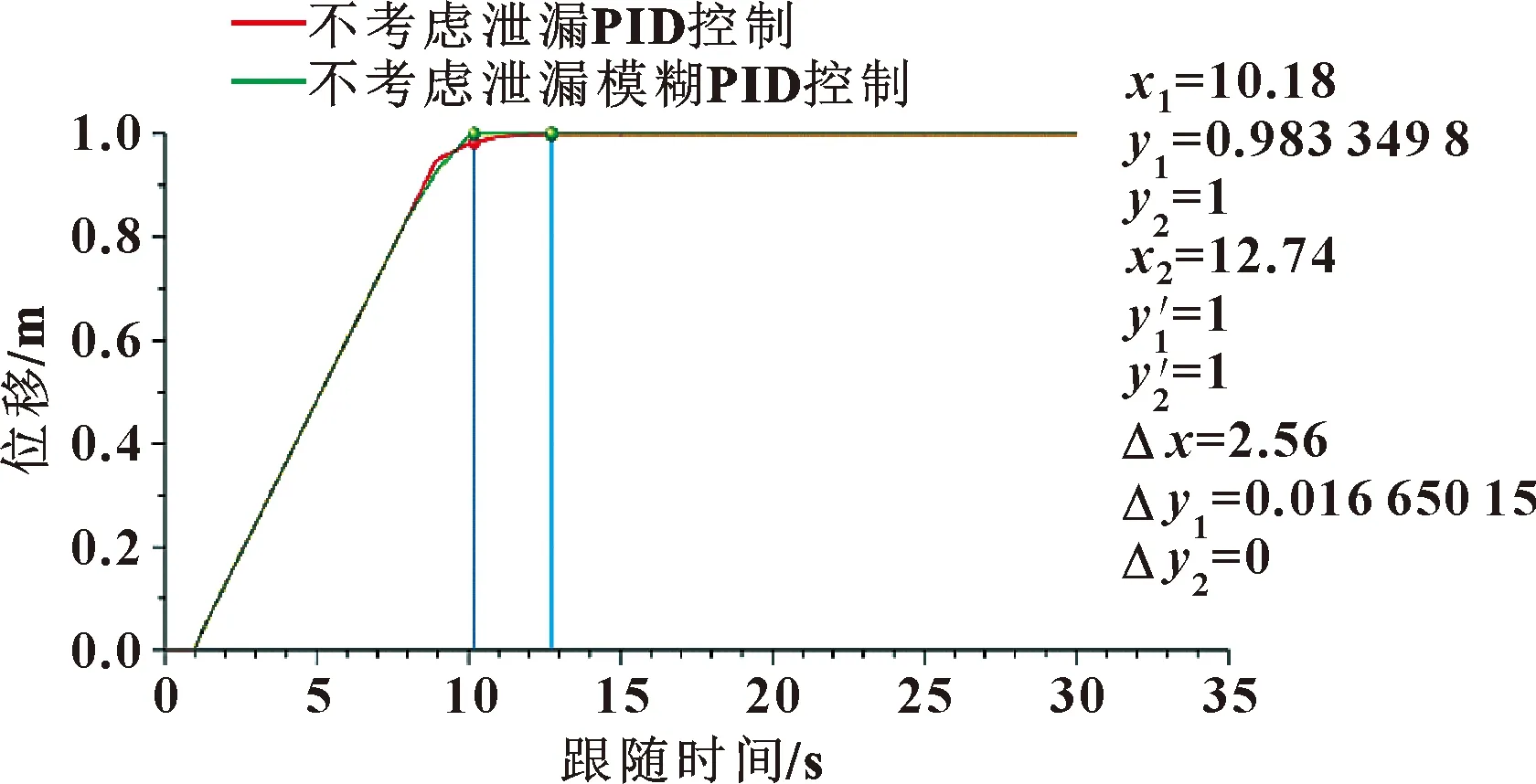
圖13 流量為150 L/min時不考慮泄漏的位移曲線
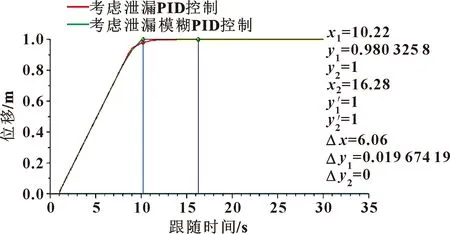
圖14 流量為150 L/min時考慮泄漏的位移曲線
液壓系統(tǒng)壓力由負載決定,將系統(tǒng)負載由9.8 N改為980 N后,其他參數(shù)保持不變,再對不考慮泄漏和考慮泄漏的系統(tǒng)分別進行模糊PID控制聯(lián)合仿真實驗,得到如圖15、圖16所示的仿真結(jié)果。
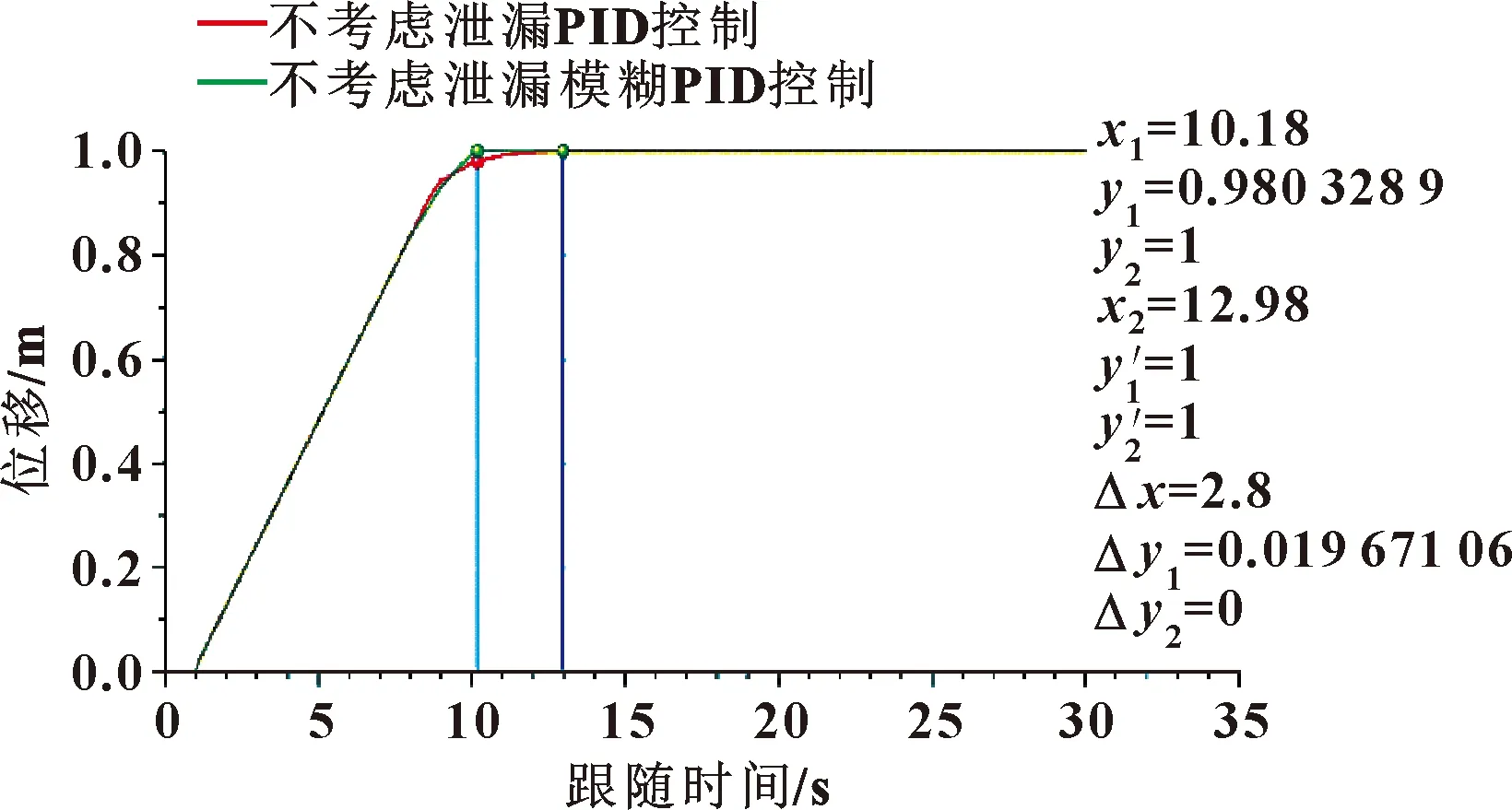
圖15 負載為980 N時不考慮泄漏的速度響應曲線
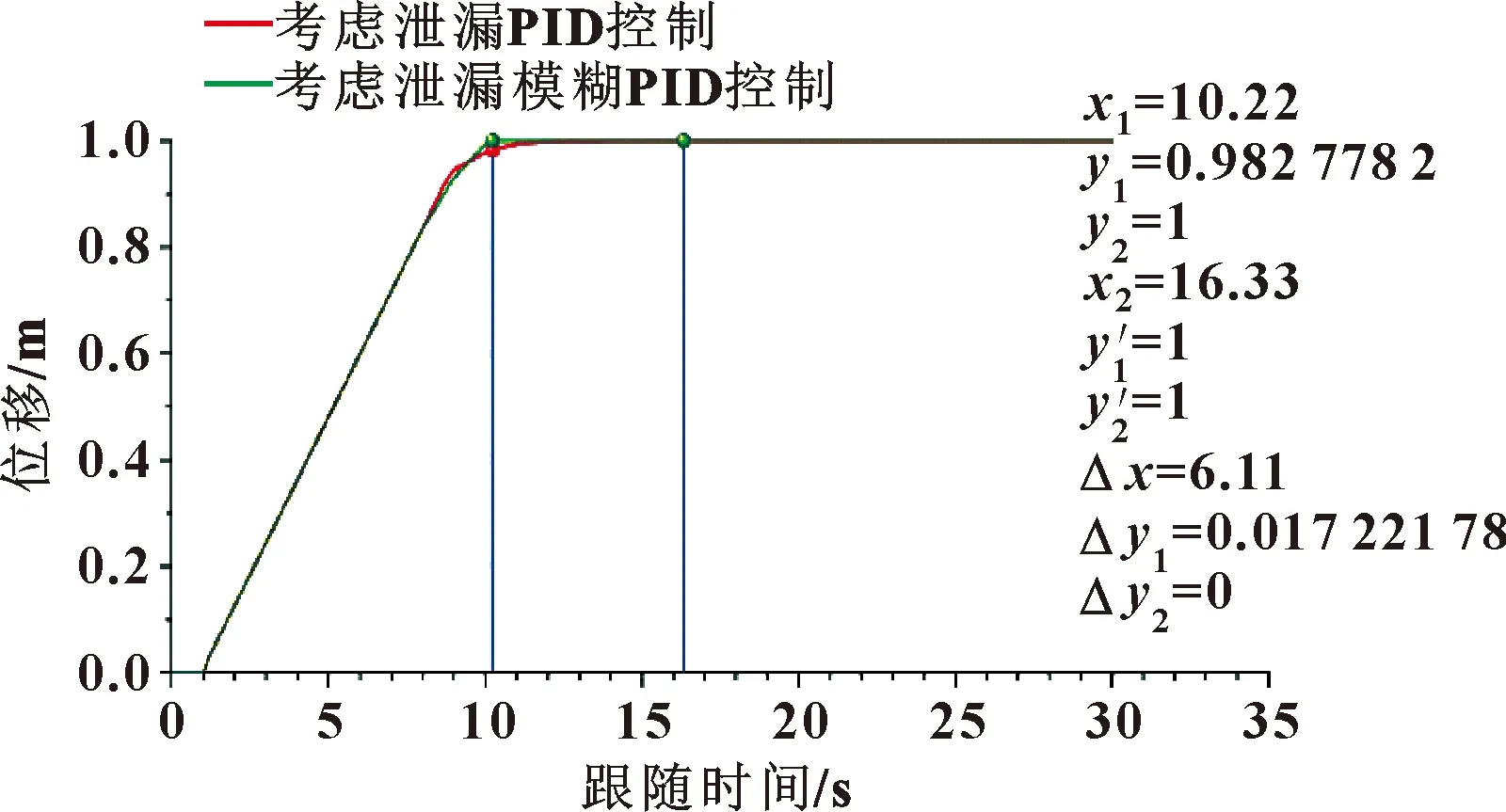
圖16 負載為980 N時考慮泄漏的速度響應曲線
由圖15、圖16仿真曲線可知:在采用模糊PID控制策略后,不考慮泄漏的系統(tǒng)活塞位移量的跟隨時間為10.18 s,響應速度與傳統(tǒng)的PID控制器相比快了2.8 s;考慮泄漏時系統(tǒng)活塞位移量的跟隨時間為10.22 s,響應速度與傳統(tǒng)的PID控制器相比快了6.11 s,系統(tǒng)控制效果有了顯著的提高,系統(tǒng)無振蕩也無超調(diào)量。
在Simulink仿真平臺建立的模糊PID控制聯(lián)合仿真中輸入正弦信號和方波信號,得到系統(tǒng)在2種不同信號下的跟蹤軌跡曲線如圖17、圖18所示。
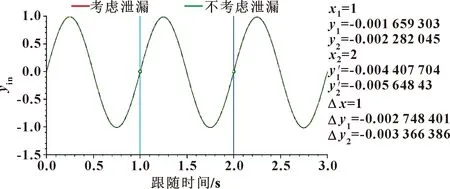
圖17 正弦信號下考慮和不考慮泄漏時跟蹤軌跡曲線對比

圖18 方波信號下考慮和不考慮泄漏時跟蹤軌跡曲線對比
由此可以看出:采用模糊PID控制可以很大程度上提高系統(tǒng)的動態(tài)性能,系統(tǒng)抵抗外負載干擾能力強,控制系統(tǒng)的魯棒性強。
5 結(jié)論
在分析系統(tǒng)的基礎上建立系統(tǒng)的傳遞函數(shù),為解決電液比例閥控缸系統(tǒng)存在的系統(tǒng)非線性因素、液壓缸泄漏的問題,基于AMESim和Simulink聯(lián)合仿真的電液比例閥控缸系統(tǒng)聯(lián)合仿真,分別在不同流量、壓力作用下對系統(tǒng)進行仿真分析。通過仿真得到液壓缸活塞位移與泄漏量之間的關系以及對系統(tǒng)性能的影響規(guī)律,分析了當液壓缸在負載干擾力和液壓缸泄漏的作用下閥控缸系統(tǒng)的輸出特性,與傳統(tǒng)PID控制器進行仿真實驗對比。結(jié)果表明:在不同的流量和壓力下,模糊PID控制器在解決系統(tǒng)液壓缸泄漏等問題中都具有良好的效果。系統(tǒng)的響應速度始終比傳統(tǒng)PID控制更快,且系統(tǒng)無超調(diào)、無振蕩、魯棒性強,在解決系統(tǒng)非線性因素影響、液壓缸泄漏等問題中具有良好的效果。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
