基于變幅信號前饋和傾角反饋的調平性能提升
2022-09-16 01:21:34吳廣寧
液壓與氣動 2022年8期
關鍵詞:信號
趙 燕,王 駿,焦 祥,吳廣寧
(無錫職業技術學院 機械技術學院,江蘇 無錫 214000)
引言
調平技術廣泛應用于現代軍事與工程設備中,如雷達、導彈發射車、高空作業車、大型鉆機和重型起吊車等,調平對設備本身的工作性能有很大影響[1-3]。以高空作業消防車為例,主臂在變幅運動過程中與水平面形成一定夾角,導致工作平臺與水平面產生相同的夾角,而調平機構需迅速對工作平臺的傾角進行調整,保證工作平臺始終水平,防止因工作平臺的傾斜對操作人員的生命安全產生威脅[4-5]。然而,由于液壓系統本身固有的非線性、參數時變、元件非一致性、電液參數需匹配(電方面或電液或控制方面問題)等特性[6-8],高空作業車輛在變幅過程中,電液調平系統易產生滯后,從而導致變幅初始動作時工作平臺與水平面之間的夾角偏差及夾角超調量增大,輕者引起整個變幅過程調平時間長,工作平臺抖動,重則直接影響操作人員的人身安全。因此,如何解決初始變幅起升時工作平臺與水平面的夾角超調量大的問題,對改善高空作業車輛的性能,提高產品安全性具有重要的研究意義。
目前,對于工作平臺的調平性能研究主要集中于調平元件優化、調平鉸接點位置/機構優化、模糊PID控制、角度閉環反饋控制等方面[9-11],同時結合前饋控制和反饋控制方面的研究較少。因此,本研究以某款典型高空作業消防車的變幅和調平系統為載體,結合機電液系統建模仿真和整機測試分析,在反饋控制的基礎上,從變幅信號前饋方面對電液調平系統進行仿真優化。
1 系統測試
圖1為某款消防車的變幅及調平液壓系統原理圖,主要由液壓泵、主閥、變幅油缸組件、調平油缸組件等組成,其中主閥是由1個電液比例變幅閥和1個電液比例調平閥組成,分別控制變幅油缸組件和調平油缸組件。消防車在工作平臺上安裝傾角傳感器采集工作平臺與水平面的夾角信號[12],當夾角信號大于設定的目標值,電液比例調平閥通過接受控制器輸出的PWM脈寬調制信號,控制調平油缸伸縮來完成工作平臺前傾或后傾,從而完成調平控制,保證工作平臺始終與地面保持水平。
通過對該消防車現場測試發現,初始變幅起升時工作平臺與水平面的夾角出現超調且幅值較大,平臺出現抖動,給用戶帶來極大的不適感。典型的測試曲線如圖2所示,該工況為發動機高速(1600 r/min)、工作平臺滿載(300 kg),主臂變幅角度φ由-12°開始起升至75°,具體如下:

圖2 變幅起升時主臂和工作平臺角度的測試曲線
(1)0~4.5 s時,主臂靜止不動,變幅角度φ為-12°,此時工作平臺角度θ保持在-0.8°;
(2)4.5~8 s,主臂開始變幅起升,變幅角度φ開始變大,工作平臺與水平面的夾角θ逐漸增大;第8秒時,變幅角度φ增大至-4°,工作平臺傾角θ由-0.8°增大至3.8°,角度變化量為4.6°,工作平臺與水平面的夾角超調量為3.8°;
(3)8~45 s,主臂角度φ由-4°變幅起至75°,工作平臺角度θ由3.8°回調振蕩,最終穩定在1°左右。
2 問題分析與改進措施
2.1 問題分析
閥控對稱液壓缸是由四邊滑閥和對稱液壓缸組成的,由圖1可知,該款消防車的調平系統屬于閥控對稱液壓缸,閥為電液比例調平閥,對稱液壓缸為2個調平油缸。
閥的線性化流量方程為:
QL=Kqxv-KcpL
(1)
式中,QL——負載流量
Kq——流量增益
xv——閥芯位移
Kc——流量-壓力系數
pL——負載壓力
液壓缸的連續性方程為:
(2)
式中,AP——液壓缸活塞有效面積
xP——活塞位移
Ctp——液壓缸總泄漏系數
Vt——液壓缸總壓縮容積
βe——有效體積彈性模量(包括油液、連接管道和缸體的機械柔度)
液壓缸的輸出力與負載力的平衡方程為:
(3)
式中,mt——活塞及負載折算到活塞上的總質量
BP——活塞及負載的黏性阻尼系數
K——負載彈簧剛度
FL——作用在活塞上的任意外負載力

(4)
式中,ωh——液壓固有頻率
ζh——液壓阻尼比
式(4)為以慣性負載為主時的閥控液壓缸的動態特性。分子中的第一項是穩態下活塞的空載速度,第二項是因外負載力造成的速度降低。在調平液壓系統中,活塞位移xP看作調平油缸位移,對位移xP影響最大的2個因子為電液比例調平閥的閥芯位移xv和外負載力FL。外負載力FL為干擾信號,而電液比例調平閥的閥芯位移xv是指令信號。
調平液壓系統為電液比例系統,而電液比例系統受比例閥中位死區等因素的影響而呈現出很強的死區非線性,可導致系統產生穩態誤差,制約系統的動態性能,有效的死區補償可以改善電液比例位置系統的動靜特性,而比例閥死區補償效果由死區參數決定[14]。因此,對電液比例調平閥進行臺架測試,圖3是電液比例調平閥在進回油壓差為3 MPa時,控制電流從0 mA逐漸增大至1400 mA時其輸出流量的測試曲線。由曲線可知,該電液比例調平閥的控制區間為480~1200 mA,死區為0~480 mA。

圖3 電液比例調平閥控制特性測試曲線
當主臂起升、變幅角度開始發生變化時,工作平臺與水平面的夾角通過傳感器反饋到控制器,控制器輸出PWM信號控制電液比例調平閥,使工作平臺跟隨主臂變幅運動。即變幅起升時,工作平臺需前傾,確保其與地面保持水平。然而,由于比例閥死區原因,當控制器輸出PWM信號時,電液比例調平閥不能立即響應控制信號,需控制信號越過死區后才能開啟[15]。如何補償比例閥死區,提高其控制性能,是比例閥控制面臨的一個挑戰[16]。此外,由于高空作業消防車作業高度是其重要指標,因此長管路是不可避免的,而液壓長管路及液壓系統自身油液壓縮性、系統建壓時間等因素進一步加劇了調平系統的遲滯現象[17-19],導致主臂變幅至一定角度后,電液比例調平閥才有控制信號,調平系統才有流量通過,調平油缸才開始對工作平臺進行調平,而這最終體現為初始變幅起升時工作平臺與水平面的夾角超調量大。
2.2 改進措施
為解決初始變幅起升工作平臺與水平面的夾角超調量大的問題,提出以下改進方案:在現有工作平臺傾角閉環反饋控制的基礎上,增加變幅信號前饋,即通過檢測電液比例變幅閥的控制信號,間接檢測變幅角度,使控制器超前輸出控制信號控制電液比例調平閥;且使該控制信號越過電液比例調平閥的一定比例的死區,從而使工作平臺同步跟隨主臂變幅動作。即在工作平臺傾角PID閉環反饋的基礎上,通過“事前控制”及“電液比例調平閥死區補償”改善調平系統的遲滯現象,減小變幅起升初始動作下工作平臺傾角的超調幅值,提高初始調平性能,其控制流程圖如圖4所示。
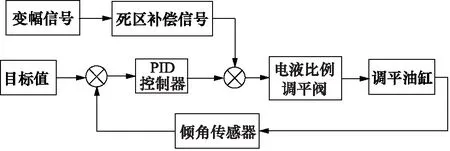
圖4 控制流程圖
3 仿真優化與整機驗證
3.1 仿真優化
根據變幅、調平液壓系統元件配置,建立含變幅信號前饋的調平電液系統仿真模型,如圖5所示,在仿真軟件中,設置各元件的相關參數,如表1所示。
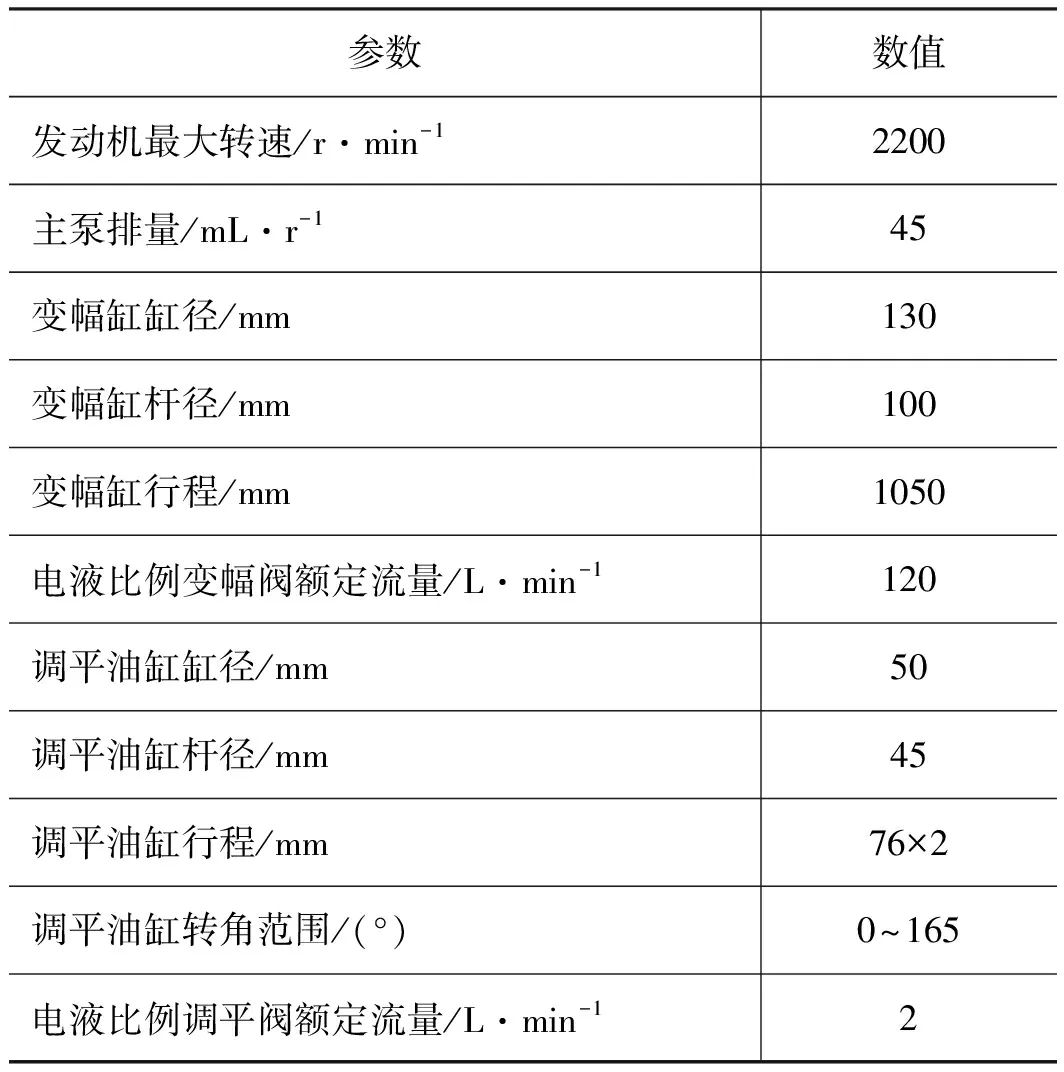
表1 變幅及調平系統仿真模型主要參數
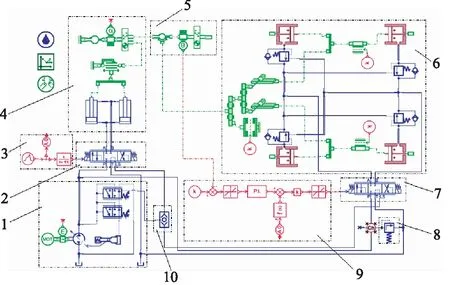
1.電機泵及油箱 2.電液比例變幅閥 3.變幅控制信號 4.變幅油缸組件 5.工作平臺 6.調平油缸組件 7.電液比例調平閥 8.溢流閥 9.調平控制信號 10.梭閥
在仿真模型中,通過設置電液比例變幅閥的控制信號發送端A0與電液比例調平閥的控制信號接收端A0的通斷,控制變幅前饋信號引入與否。當發送端A0和接收端A0斷開,表示不引入變幅前饋信號,模擬原變幅及調平系統,即只含工作平臺傾角閉環反饋;當發送端A0和接收端A0連通,表示引入變幅角度前饋信號,同時在電液比例調平閥的A0接收端通過設置合理的函數f(x),給定電液比例調平閥的死區補償信號。
首先,校正原系統仿真模型的準確度,仿真工況保持與圖2曲線的測試工況一致,輸入電液比例變幅閥的控制信號控制主臂變幅動作,仿真輸出主臂變幅角度、變幅油缸無桿腔壓力以及工作平臺傾角的變化量;然后,根據功率流原理建模,將仿真結果與測試結果對比,如圖6~圖8所示。

圖7 變幅缸無桿腔壓力仿真數據與實測數據對比

圖8 工作平臺傾角仿真數據與測試數據對比
由圖6~圖8可知,主臂變幅角度、變幅油缸無桿腔壓力以及工作平臺傾角的仿真曲線與測試曲線整體趨勢一致,該仿真模型可以用于分析變幅起升時的調平性能。在此仿真模型的基礎上,引入變幅角度前饋信號,將發送端A0和接收端A0連通;同時對比不同的死區補償電流下工作平臺傾角的超調量,其仿真結果如圖9和圖10所示。
圖9為仿真對比只引入變幅前饋信號的工作平臺傾角與原系統無變幅前饋信號的工作平臺傾角,由圖可知,工作平臺傾角均從-1°開始調平,引入變幅前饋信號后,初始動作時,工作平臺傾角的峰值由3.5°減少至2.3°,幅值降低了34%。
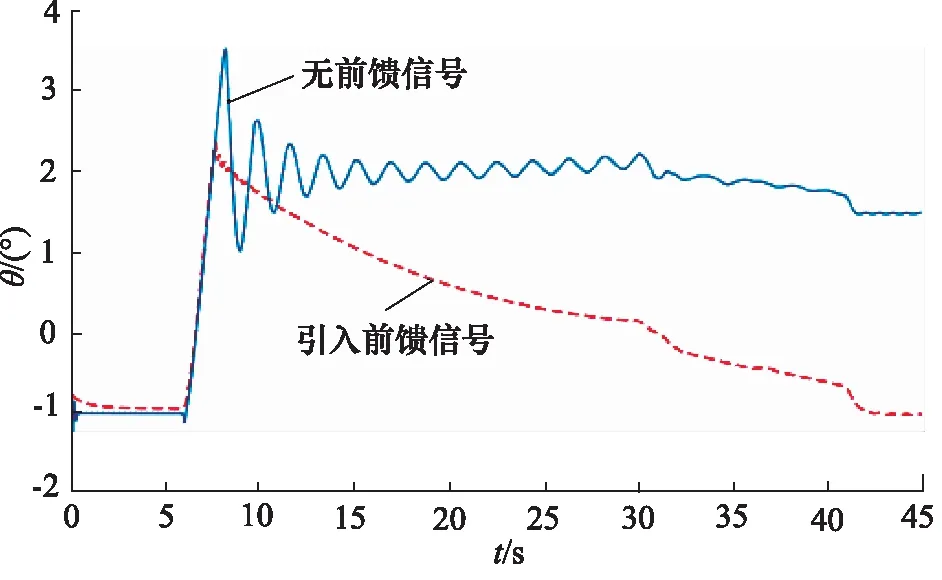
圖9 引入前饋信號前、后的工作平臺傾角仿真曲線對比
圖10為引入變幅前饋信號,對比電液比例調平閥不同死區補償量的工作平臺的傾角。由圖可知,死區補償量分別為電液比例調平閥死區的40%,70%,100%時,初始變幅時,工作平臺傾角的偏差分別為2.4°,0.8°,1.3°;當死區補償量為100%時,工作平臺出現過補償。

圖10 不同的死區補償量下工作平臺傾角仿真曲線對比
由此可知,在工作平臺傾角閉環反饋的基礎上,引入變幅前饋信號后,電液比例調平閥死區補償電流設置太小,調平系統有延遲,工作平臺傾角超調量仍然大;電液比例調平閥死區補償電流設置太大,調平系統響應太快,易引起工作平臺傾角的過補償。因此,電液比例調平閥需設置合理的死區補償值。
3.2 整機驗證
根據該技術方案對此款消防車產品進行技術改進,在滿足系統穩定時間下,結合原工作平臺傾角閉環反饋,增加主臂變幅角度前饋控制,設置合理的電液比例調平閥死區補償電流值,保持發動機轉速、控制手柄開度及外載荷與圖2曲線的測試工況相同,對主臂變幅進行整機測試驗證。優化后的測試曲線如圖11所示,主臂變幅初始角度φ為-12°,工作平臺初始角度θ為-0.1°;第4.5秒主臂開始變幅,變幅角度開始增大,工作平臺角度θ跟隨主臂角度出現超調,第6秒時達到最大超調角度0.75°,第7秒時工作平臺角度回調至0°并保持。變幅初始工作平臺與水平面的夾角超調量由之前的3.8°減少至0.75°,調平效果顯著。
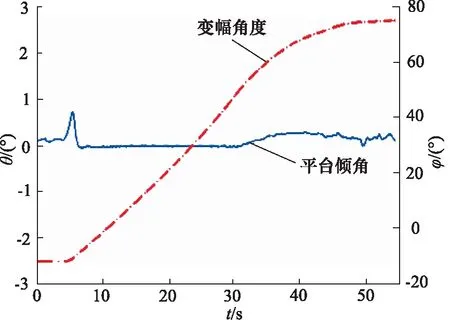
圖11 優化后變幅起升時主臂和工作平臺角度的測試曲線
4 結論
(1)針對高空作業消防車初始變幅起升時工作平臺與水平面的夾角超調量大的問題,在工作平臺傾角閉環反饋的基礎上,增加變幅信號前饋及設置合理的電液比例調平閥死區補償量,對電液比例調平閥進行“事前控制”,可有效改善電液調平系統的遲滯現象,減小變幅起升初始動作下工作平臺與水平面夾角的超調幅值,提高調平性能;
(2)電液比例調平閥的死區補償需設置合理的值,死區補償值太小,調平系統仍有明顯延遲、超調量仍大;死區補償電流太大,易引起工作平臺傾角的過補償;
(3)該套仿真分析方法對高空作業車輛的電液系統的調平性能提升方面具有借鑒意義和參考價值。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
