升沉補(bǔ)償系統(tǒng)多目標(biāo)構(gòu)型優(yōu)化
2022-09-16 01:21:30柏文峰錢于杰
液壓與氣動(dòng) 2022年8期
洪 黎,柏文峰,張 超,錢于杰
(1.中國(guó)航發(fā)控制系統(tǒng)研究所,江蘇 無(wú)錫 214100;2.北京航空航天大學(xué) 自動(dòng)化科學(xué)與電氣工程學(xué)院,北京 100191)
引言
海上作業(yè)由于受到海浪、海風(fēng)、海潮、洋流等各種惡劣海洋條件的影響,海洋作業(yè)裝備會(huì)隨之產(chǎn)生升沉運(yùn)動(dòng),嚴(yán)重威脅海上作業(yè)的安全性,同時(shí)也會(huì)縮短海洋作業(yè)的窗口期,降低海上作業(yè)的效率。升沉補(bǔ)償系統(tǒng)的目的是為了實(shí)現(xiàn)海洋作業(yè)設(shè)備運(yùn)動(dòng)和海浪運(yùn)動(dòng)的解耦,可以有效地降低海洋裝備升沉運(yùn)動(dòng)對(duì)于海洋作業(yè)的各種影響。目前,國(guó)內(nèi)外已經(jīng)有很多關(guān)于升沉補(bǔ)償系統(tǒng)控制算法和性能仿真的研究[1-5]。
WOODACRE J K等[6]為主動(dòng)升沉補(bǔ)償系統(tǒng)設(shè)計(jì)了模型預(yù)測(cè)控制器(Model-predictive Controller,MPC),克服了四位三通閥的滯后、死區(qū)和非線性特性等問(wèn)題。LI S等[7]為了減少船舶意外升沉變化對(duì)水下有效載荷響應(yīng)的不利影響,特別設(shè)計(jì)了一種具有非線性串聯(lián)控制器的混合主動(dòng)-被動(dòng)升沉補(bǔ)償(HAHC)系統(tǒng)。DO K D等[8]設(shè)計(jì)了一種采用非線性控制器的雙桿電靜液作動(dòng)器驅(qū)動(dòng)的主動(dòng)升沉補(bǔ)償系統(tǒng),控制系統(tǒng)通過(guò)調(diào)節(jié)立管上端到海床的距離來(lái)減少船舶升沉運(yùn)動(dòng)對(duì)立管響應(yīng)的影響。KUCHLER S等[9]為了解決主動(dòng)升沉補(bǔ)償系統(tǒng)傳感器和執(zhí)行器之間時(shí)間延遲的問(wèn)題,首先提出了一種船舶垂直運(yùn)動(dòng)的預(yù)測(cè)算法,使用前饋控制器為液壓驅(qū)動(dòng)絞車制定了一種基于反轉(zhuǎn)的控制策略,使得有效載荷的運(yùn)動(dòng)與船舶的運(yùn)動(dòng)分離。
隨著升沉補(bǔ)償系統(tǒng)的發(fā)展,補(bǔ)償效率不再是評(píng)價(jià)其好壞的唯一標(biāo)準(zhǔn)。作為海洋作業(yè)的重要一環(huán),升沉補(bǔ)償系統(tǒng)的穩(wěn)定性和可靠性越來(lái)越受到用戶的關(guān)注。同時(shí),升沉補(bǔ)償系統(tǒng)作為一款商品,成本因素是其不可忽略的一個(gè)競(jìng)爭(zhēng)力因素。在升沉補(bǔ)償系統(tǒng)結(jié)構(gòu)和控制方法日趨成熟的背景下,對(duì)于考慮多目標(biāo)優(yōu)化情況下的升沉補(bǔ)償結(jié)構(gòu)優(yōu)化研究,可以使升沉補(bǔ)償系統(tǒng)在補(bǔ)償效率、成本、可靠性等各個(gè)方面都獲得較好的指標(biāo),更加有利于升沉補(bǔ)償系統(tǒng)高效、健康、低成本的穩(wěn)定運(yùn)行,也有利于推動(dòng)其商業(yè)化發(fā)展。
在升沉補(bǔ)償系統(tǒng)優(yōu)化方面,國(guó)內(nèi)外進(jìn)行了相關(guān)的研究,主要集中在控制系統(tǒng)參數(shù)的優(yōu)化和系統(tǒng)機(jī)械結(jié)構(gòu)的優(yōu)化兩方面[10]。升沉補(bǔ)償系統(tǒng)的補(bǔ)償效果與控制參數(shù)的選擇有關(guān),ZHOU M等[11]建立了基于遺傳PID控制算法的波浪補(bǔ)償系統(tǒng)控制框圖,采用遺傳粒子群優(yōu)化算法,通過(guò)交叉和變異算子對(duì)最優(yōu)指標(biāo)和PID參數(shù)進(jìn)行優(yōu)化。TANG G等[12]利用粒子群算法優(yōu)化了升沉補(bǔ)償系統(tǒng)控制器的控制參數(shù),該算法使得系統(tǒng)超調(diào)小、響應(yīng)快。在升沉補(bǔ)償系統(tǒng)機(jī)械結(jié)構(gòu)的優(yōu)化方面,GU P等[13]為海上起重機(jī)開(kāi)發(fā)了一種主動(dòng)升沉補(bǔ)償系統(tǒng)設(shè)計(jì)方法,將成本和性能因素納入設(shè)計(jì)階段;ZHANG Y等[14]為減小支撐腿的伸展范圍,同時(shí)降低補(bǔ)償平臺(tái)上甲板的工作高度,對(duì)補(bǔ)償平臺(tái)的結(jié)構(gòu)進(jìn)行了優(yōu)化,并設(shè)計(jì)了一種新型的3-SPR并行平臺(tái)。
國(guó)內(nèi)也對(duì)升沉補(bǔ)償系統(tǒng)的優(yōu)化進(jìn)行了一定的研究。吳倩[15]用AMESim對(duì)絞車升沉補(bǔ)償系統(tǒng)進(jìn)行參數(shù)敏感性分析,分別研究了絞車轉(zhuǎn)動(dòng)慣量、蓄能器體積、初始?jí)毫σ约柏?fù)載因素對(duì)補(bǔ)償效果的影響。李曉東等[16]對(duì)3種常見(jiàn)的天車升沉補(bǔ)償系統(tǒng)進(jìn)行分析比較,對(duì)性能較差的系統(tǒng)進(jìn)行了優(yōu)化升級(jí),并通過(guò)仿真驗(yàn)證了優(yōu)化結(jié)果的有效性。劉振東等[17]對(duì)比了3套不同的天車升沉補(bǔ)償系統(tǒng)搖擺裝置經(jīng)典設(shè)計(jì)方案,分別建立其數(shù)值模型,基于線性加權(quán)法建立其影響因素權(quán)重表和綜合評(píng)價(jià)標(biāo)準(zhǔn),從而實(shí)現(xiàn)了3套方案中的評(píng)價(jià)選優(yōu)。劉香福[18]將海浪補(bǔ)償模擬系統(tǒng)的結(jié)構(gòu)參數(shù)作為決策變量,將全局調(diào)整指標(biāo)和全局操作指標(biāo)作為目標(biāo)函數(shù),采用序列二次規(guī)劃算法進(jìn)行參數(shù)優(yōu)化。熊云峰等[19]綜合運(yùn)用層次分析法、變異系數(shù)法、加權(quán)-灰色TOPSIS法,解決了天車型升沉補(bǔ)償系統(tǒng)中搖擺裝置構(gòu)型優(yōu)選問(wèn)題。
本研究在對(duì)主被動(dòng)復(fù)合式升沉補(bǔ)償系統(tǒng)的工作原理進(jìn)行分析的基礎(chǔ)上,結(jié)合設(shè)計(jì)要求,提出了升沉補(bǔ)償系統(tǒng)多目標(biāo)優(yōu)化的設(shè)計(jì)方法,以可靠性、成本和補(bǔ)償效率為目標(biāo)函數(shù),綜合應(yīng)用非支配排序和層次分析方法獲得了升沉補(bǔ)償系統(tǒng)的最優(yōu)構(gòu)型。
1 升沉補(bǔ)償系統(tǒng)構(gòu)型分析
1.1 優(yōu)化對(duì)象分析
主被動(dòng)復(fù)合式升沉補(bǔ)償系統(tǒng)多目標(biāo)構(gòu)型優(yōu)化的第一步為構(gòu)型搜索,首先需要對(duì)主被動(dòng)復(fù)合式升沉補(bǔ)償系統(tǒng)的結(jié)構(gòu)進(jìn)行分析。根據(jù)設(shè)計(jì)需求,所研究的升沉補(bǔ)償系統(tǒng)是為了應(yīng)對(duì)4級(jí)海況,對(duì)應(yīng)浪高度范圍為1.25~2.50 m。
液壓系統(tǒng)具有驅(qū)動(dòng)功率密度大、快速性好等優(yōu)點(diǎn),常作為升沉補(bǔ)償系統(tǒng)的驅(qū)動(dòng)方式。ZHANG C等[20-21]對(duì)某型主被動(dòng)復(fù)合式升沉補(bǔ)償系統(tǒng)液壓系統(tǒng)的原理進(jìn)行了詳細(xì)的分析,并將其分為能源系統(tǒng)和補(bǔ)償裝置,其中能源系統(tǒng)為升沉補(bǔ)償系統(tǒng)的正常工作提供能源支持,能源系統(tǒng)中的蓄能器和泵屬于關(guān)鍵部件且重要度較高,對(duì)系統(tǒng)的安全可靠運(yùn)行非常重要。因此本研究從提高升沉補(bǔ)償系統(tǒng)可靠度的目的出發(fā),對(duì)液壓泵和蓄能器采用冗余設(shè)計(jì),從而提高系統(tǒng)整體的可靠度,延長(zhǎng)系統(tǒng)的工作時(shí)間。
船用升沉補(bǔ)償系統(tǒng)考慮到離岸工作的特點(diǎn)及高可靠性的需求,在補(bǔ)償裝置層面上多采用系統(tǒng)級(jí)冗余的策略,如圖1所示。本研究所考慮的升沉補(bǔ)償系統(tǒng)需要設(shè)置2套補(bǔ)償裝置,即補(bǔ)償裝置1和補(bǔ)償裝置2。根據(jù)前期的需求分析和后續(xù)的目標(biāo)函數(shù)約束,補(bǔ)償裝置1和補(bǔ)償裝置2可采用相似冗余設(shè)計(jì),也可采用非相似冗余設(shè)計(jì)。在某個(gè)具體的補(bǔ)償裝置中,不同類型的液壓缸與控制閥組的組合也可以進(jìn)行優(yōu)化設(shè)計(jì)。采用硬件余度的可靠性設(shè)計(jì)技術(shù)可以提高升沉補(bǔ)償系統(tǒng)的可靠性,為海上作業(yè)提供更加可靠、安全的支撐。
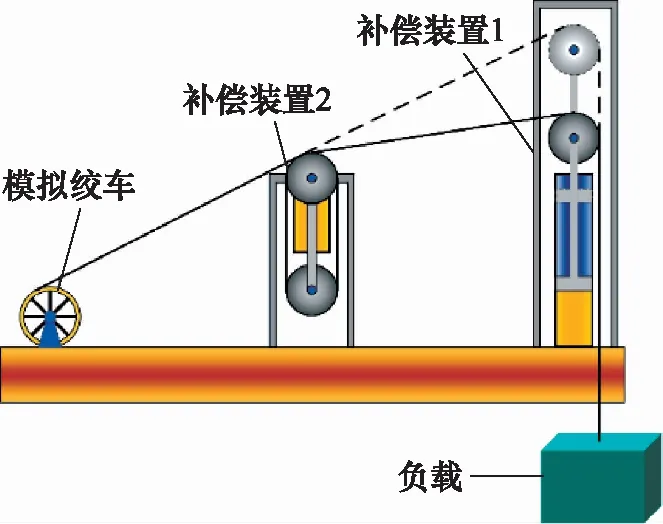
圖1 補(bǔ)償裝置整體構(gòu)型
1.2 基本構(gòu)型
補(bǔ)償裝置是升沉補(bǔ)償系統(tǒng)的核心,直接影響著系統(tǒng)的補(bǔ)償效率,不同的補(bǔ)償裝置在部件類型、連接方式等方面上存在差異,圖2~圖4為3種不同的補(bǔ)償裝置構(gòu)型。
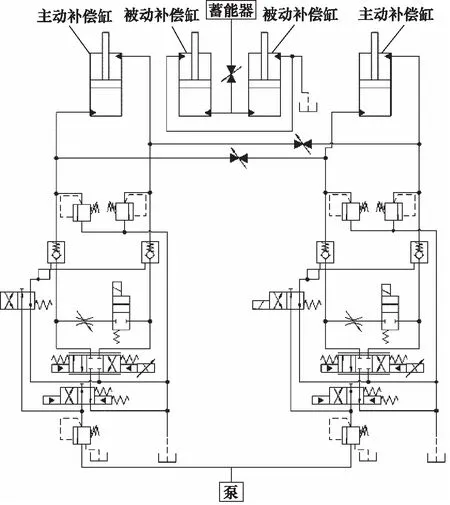
圖2 補(bǔ)償裝置構(gòu)型1
圖2中為構(gòu)型1,編號(hào)DC1。被動(dòng)補(bǔ)償缸和主動(dòng)補(bǔ)償缸均采用活塞缸,2個(gè)控制閥組分別控制2個(gè)主動(dòng)補(bǔ)償缸,實(shí)現(xiàn)4個(gè)活塞桿的同步伸縮。
圖3為構(gòu)型2,編號(hào)DC2,是構(gòu)型1的縮減版,1個(gè)控制閥組控制2個(gè)主動(dòng)補(bǔ)償缸。由于僅采用1個(gè)控制閥組,最大流量為構(gòu)型1的1/2,在應(yīng)對(duì)低等級(jí)海浪時(shí)補(bǔ)償效率不受影響,在面對(duì)惡劣海況時(shí),補(bǔ)償效率會(huì)下降。
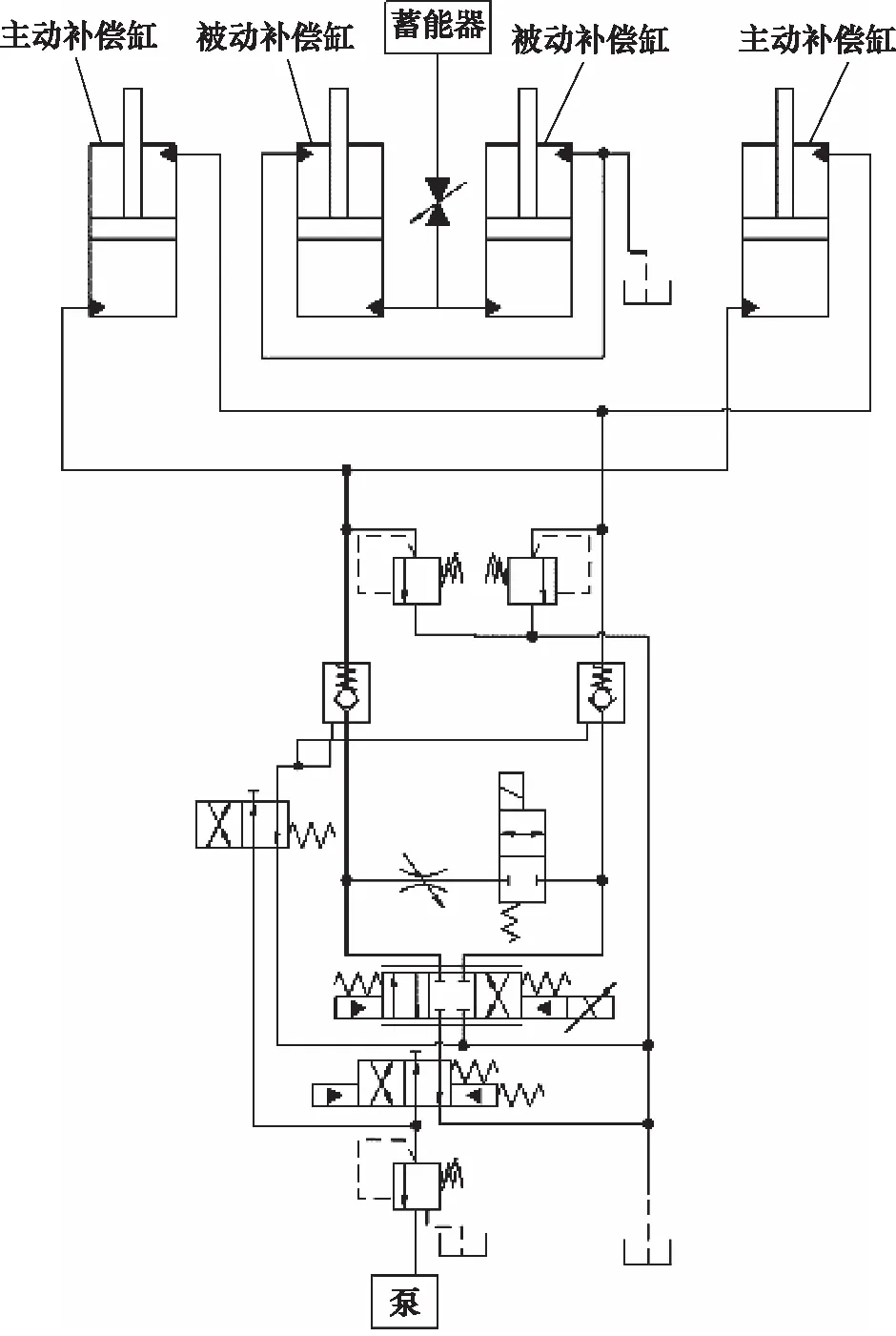
圖3 補(bǔ)償裝置構(gòu)型2
圖4為構(gòu)型3,編號(hào)DC3。被動(dòng)補(bǔ)償缸采用活塞缸,而主動(dòng)補(bǔ)償缸采用柱塞缸。由于柱塞缸具有只能伸出不能縮回的特點(diǎn),因此控制閥組兩端分別連接被動(dòng)補(bǔ)償缸的有桿腔和主動(dòng)補(bǔ)償缸。當(dāng)控制閥組向主動(dòng)補(bǔ)償缸供油時(shí),實(shí)現(xiàn)所有液壓缸同步伸出;當(dāng)控制閥組向被動(dòng)補(bǔ)償缸無(wú)桿腔供油時(shí),實(shí)現(xiàn)所有液壓缸同步縮回。
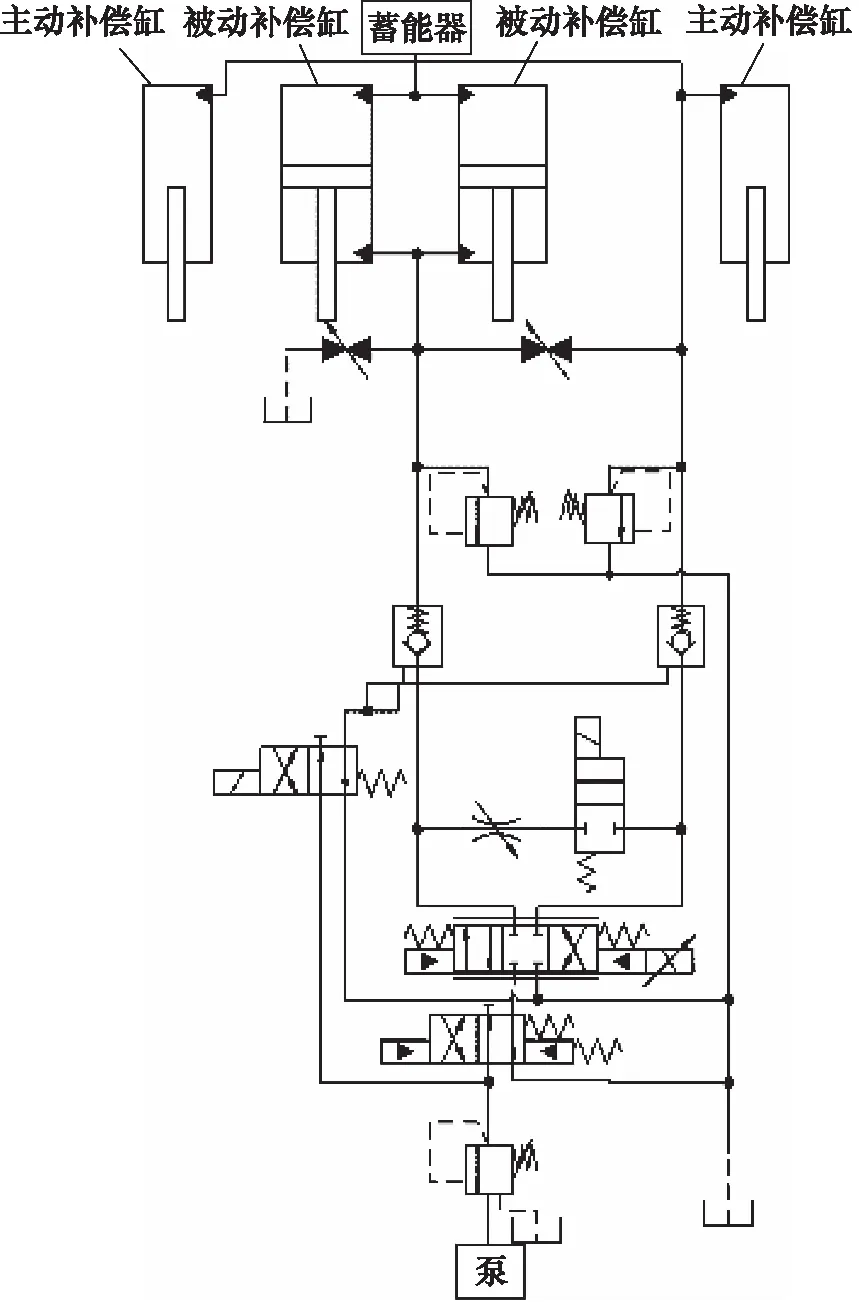
圖4 補(bǔ)償裝置構(gòu)型3
在3種構(gòu)型中,控制閥組采用相同結(jié)構(gòu)設(shè)計(jì),減壓閥起到減低壓力的作用,2個(gè)電磁換向閥起到安全閥的作用,只有兩者同時(shí)通電,系統(tǒng)才能正常工作。伺服閥接收控制信號(hào),控制液壓缸的伸出和縮回,實(shí)現(xiàn)升沉補(bǔ)償?shù)哪康摹9?jié)流閥和電磁開(kāi)關(guān)閥共同作用,在系統(tǒng)啟動(dòng)和關(guān)閉時(shí)起到導(dǎo)通和緩沖的作用。
在補(bǔ)償裝置中,液壓缸的行程決定了補(bǔ)償裝置的最大補(bǔ)償能力,液壓缸的行程越長(zhǎng),補(bǔ)償裝置可應(yīng)對(duì)的海況等級(jí)越高。在本研究所討論的3種構(gòu)型的補(bǔ)償裝置中,液壓缸的行程是根據(jù)4級(jí)海況要求設(shè)計(jì)的,其行程取浪高的典型值,即2 m。升沉補(bǔ)償系統(tǒng)的補(bǔ)償效率由補(bǔ)償裝置構(gòu)型和控制方式直接決定,也受到液壓泵、蓄能器等因素的影響。
泵在不同構(gòu)型的差別為冗余數(shù)量的差別,如表1所示。本研究分別考慮1臺(tái)泵、2臺(tái)泵和3臺(tái)泵的情況。由升沉補(bǔ)償系統(tǒng)的工作原理可知,泵的流量會(huì)影響補(bǔ)償效率,當(dāng)海況等級(jí)較為惡劣時(shí),海浪高度變化速度快,對(duì)于液壓缸的活塞缸的伸出或者縮回的速度要求也相應(yīng)提高。流入液壓缸的流量決定了液壓缸作動(dòng)的快慢,泵為液壓缸的作動(dòng)提供流量,不同構(gòu)型的泵組合在流量供給能力上存在差異。本研究的泵最大流量為100 L/min,若3臺(tái)泵共同作用,則最大供油流量為300 L/min。在面對(duì)高度較低的海浪時(shí),1臺(tái)泵的流量足以支撐整個(gè)系統(tǒng)的流量需求,其余泵可作為冗余備份。在面對(duì)惡劣海況時(shí),多臺(tái)泵共同作用,可以提高補(bǔ)償效率。
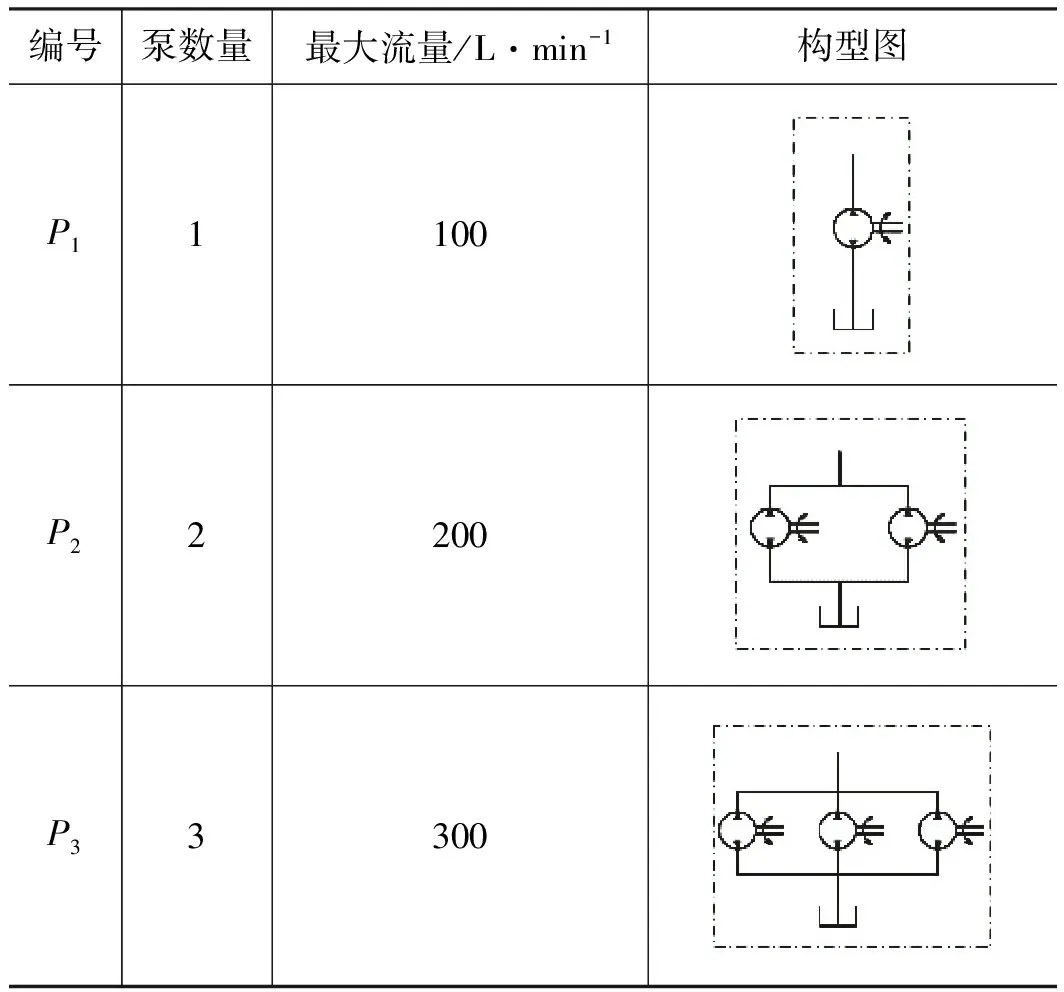
表1 泵的構(gòu)型
蓄能器在主被動(dòng)復(fù)合式升沉補(bǔ)償系統(tǒng)中起到平衡靜態(tài)負(fù)載的作用。蓄能器在不同構(gòu)型的差別為冗余數(shù)量的差別,如表2所示。根據(jù)AMESim仿真結(jié)果,當(dāng)2個(gè)被動(dòng)補(bǔ)償缸共同連接1個(gè)有效體積為20 L的蓄能器時(shí),蓄能器的體積難以支撐6級(jí)海況時(shí)升沉補(bǔ)償系統(tǒng)的工作要求,補(bǔ)償效率會(huì)有明顯的下降,因此,本研究分別考慮2個(gè)蓄能器、3個(gè)蓄能器和4個(gè)蓄能器,對(duì)應(yīng)的蓄能器有效體積分別為40 L,60 L和80 L。
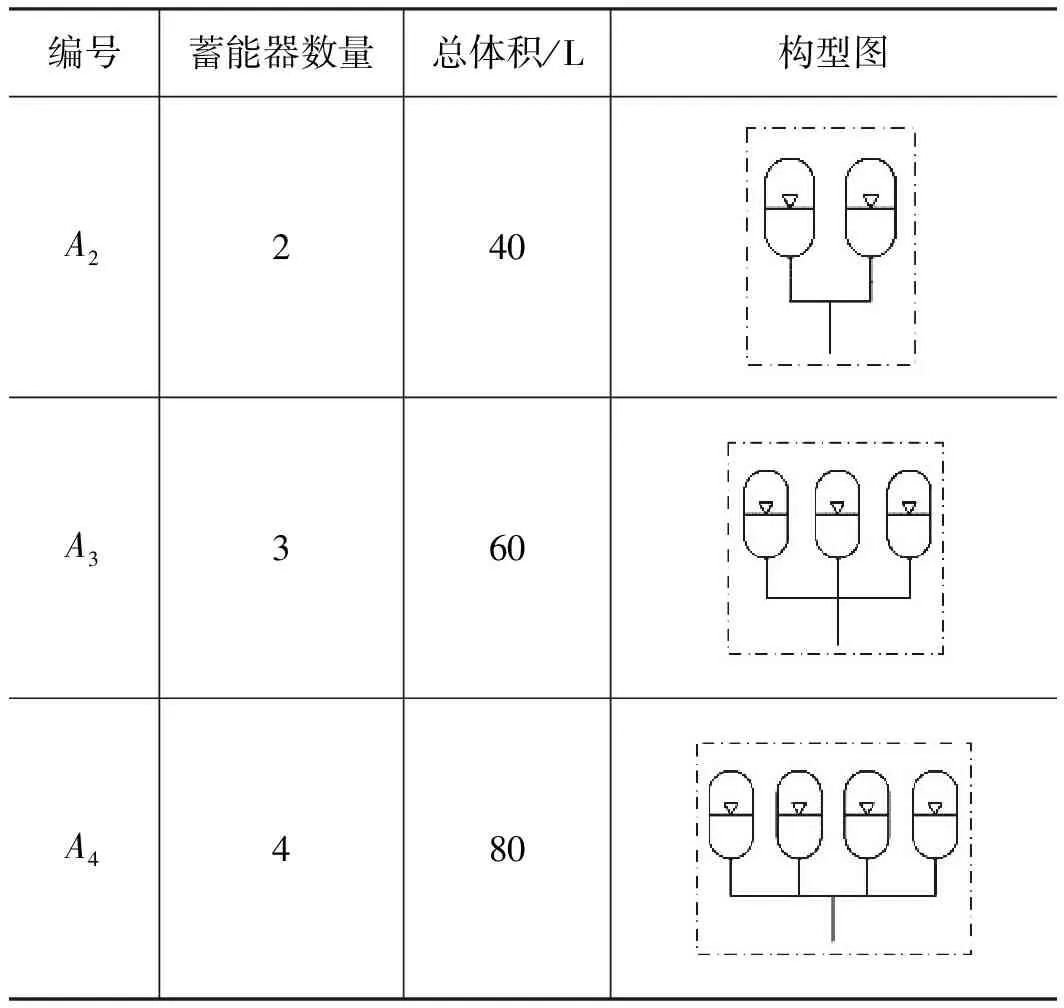
表2 蓄能器的構(gòu)型
根據(jù)升沉補(bǔ)償系統(tǒng)的設(shè)計(jì)要求,可確定決策變量為泵、蓄能器、補(bǔ)償裝置1和補(bǔ)償裝置2,表示成變量集合的形式為V={P,A,D1,D2}。其中P表示泵,其值域?yàn)镻={P1,P2,P3};A表示蓄能器,其值域?yàn)锳={A2,A3,A4};D1表示補(bǔ)償裝置1,其值域?yàn)镈1={DC1,DC2,DC3};D2表示補(bǔ)償裝置2,其值域?yàn)镈2={DC1,DC2,DC3}。
升沉補(bǔ)償系統(tǒng)在配置構(gòu)型時(shí)需要滿足一定的約束條件,根據(jù)設(shè)計(jì)要求,補(bǔ)償裝置1和補(bǔ)償裝置2既可以采用相似冗余設(shè)計(jì),也可采用非相似冗余設(shè)計(jì)。基于上述約束條件,共有54種升沉補(bǔ)償系統(tǒng)構(gòu)型組合滿足約束條件。
2 升沉補(bǔ)償系統(tǒng)目標(biāo)函數(shù)評(píng)估
對(duì)于升沉補(bǔ)償系統(tǒng),一方面要考慮可靠性和補(bǔ)償效率的提升,另一方面要考慮成本因素的限制。因此,可靠性R、成本C和補(bǔ)償效率η成為升沉補(bǔ)償系統(tǒng)多目標(biāo)構(gòu)型優(yōu)化的3個(gè)目標(biāo)函數(shù),記為Z=[RCη]。不同構(gòu)型的可靠性、成本和補(bǔ)償效率會(huì)相互制約,以泵為例,多臺(tái)泵的可靠性高于1臺(tái)泵,同時(shí)對(duì)于惡劣海況的補(bǔ)償效率也會(huì)提升,但是成本也會(huì)隨之上升。
不同的工況影響著升沉補(bǔ)償系統(tǒng)的工作模式,也影響著系統(tǒng)的目標(biāo)函數(shù),因此在對(duì)目標(biāo)函數(shù)進(jìn)行評(píng)估前,首先需要確定系統(tǒng)的工況。根據(jù)對(duì)海浪的分析結(jié)果可知,海浪能量集中在0.1 Hz左右,因此在多目標(biāo)構(gòu)型優(yōu)化中,本研究采用頻率為0.1 Hz的正弦波模擬海浪,浪高為2 m,對(duì)應(yīng)出現(xiàn)概率最高的4級(jí)海況條件。
2.1 可靠性評(píng)估方法
可靠性是定量評(píng)估系統(tǒng)在規(guī)定的使用條件下,在規(guī)定的時(shí)間內(nèi),完成規(guī)定功能的能力。升沉補(bǔ)償系統(tǒng)應(yīng)用在惡劣的海洋工況下,為海洋作業(yè)提供安全穩(wěn)定的支撐,其可靠性直接影響著海洋作業(yè)的安全性和穩(wěn)定性。正因此,對(duì)于升沉補(bǔ)償系統(tǒng)有著高可靠性的要求。此外,升沉補(bǔ)償系統(tǒng)離岸工作的特點(diǎn)使其維護(hù)維修存在諸多不便之處,因此需要盡可能提高系統(tǒng)的可靠性,降低系統(tǒng)故障發(fā)生的概率。
可靠性框圖法是一種常用的可靠性預(yù)計(jì)方法,這種方法是從可靠性角度出發(fā)研究系統(tǒng)與部件之間的邏輯圖。升沉補(bǔ)償系統(tǒng)整體的可靠性框圖如圖5所示,泵、蓄能器和補(bǔ)償裝置三者為串聯(lián)關(guān)系,其中補(bǔ)償裝置中的補(bǔ)償裝置1和補(bǔ)償裝置2互為彼此的備份,為并聯(lián)關(guān)系,因此系統(tǒng)整體的可靠性可以表示為:
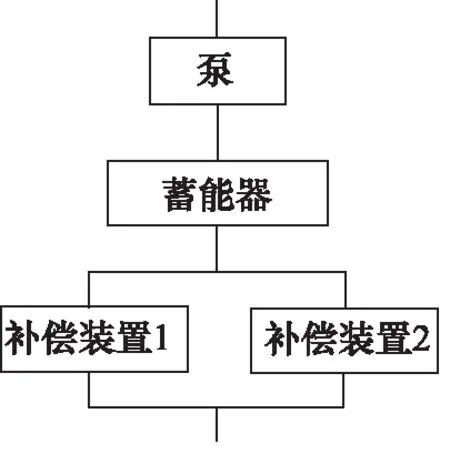
圖5 升沉補(bǔ)償系統(tǒng)可靠性框圖
R=RPRA[1-(1-RD1)(1-RD2)]
(1)
式中,RP——泵組的可靠性
RA——蓄能器組的可靠性
RD1,RD2——補(bǔ)償裝置1和補(bǔ)償裝置2的可靠性
在設(shè)計(jì)工況要求下,1臺(tái)泵所能提供的流量滿足升沉補(bǔ)償系統(tǒng)正常工作的需求。因此,泵組是一個(gè)簡(jiǎn)單的并聯(lián)系統(tǒng),其可靠性可以表示為:
RP=1-(1-Rp)np
(2)
式中,Rp——單臺(tái)泵的可靠性
np——泵的臺(tái)數(shù)
由于主被動(dòng)復(fù)合式升沉補(bǔ)償系統(tǒng)正常工作至少需要2個(gè)蓄能器,因此蓄能器組是一個(gè)2/n的表決系統(tǒng),其可靠性計(jì)算可由下式得到:
(3)
式中,na——蓄能器的個(gè)數(shù),構(gòu)型A2,A3,A4分別為2,3,4
i——構(gòu)型i
Ra——單個(gè)蓄能器的可靠性
補(bǔ)償裝置構(gòu)型1,2,3的可靠性框圖如圖6a~圖6c所示,由此可計(jì)算3種構(gòu)型的可靠性。

圖6 補(bǔ)償裝置可靠性框圖
由于部件和系統(tǒng)的可靠性是隨時(shí)間變化的,因此本研究選取500 h時(shí)不同構(gòu)型的可靠性作為評(píng)估的目標(biāo)函數(shù)。表3列出了各個(gè)構(gòu)型在500 h時(shí)的可靠性,結(jié)合式(1)~式(3),可計(jì)算出不同構(gòu)型的升沉補(bǔ)償系統(tǒng)可靠性。
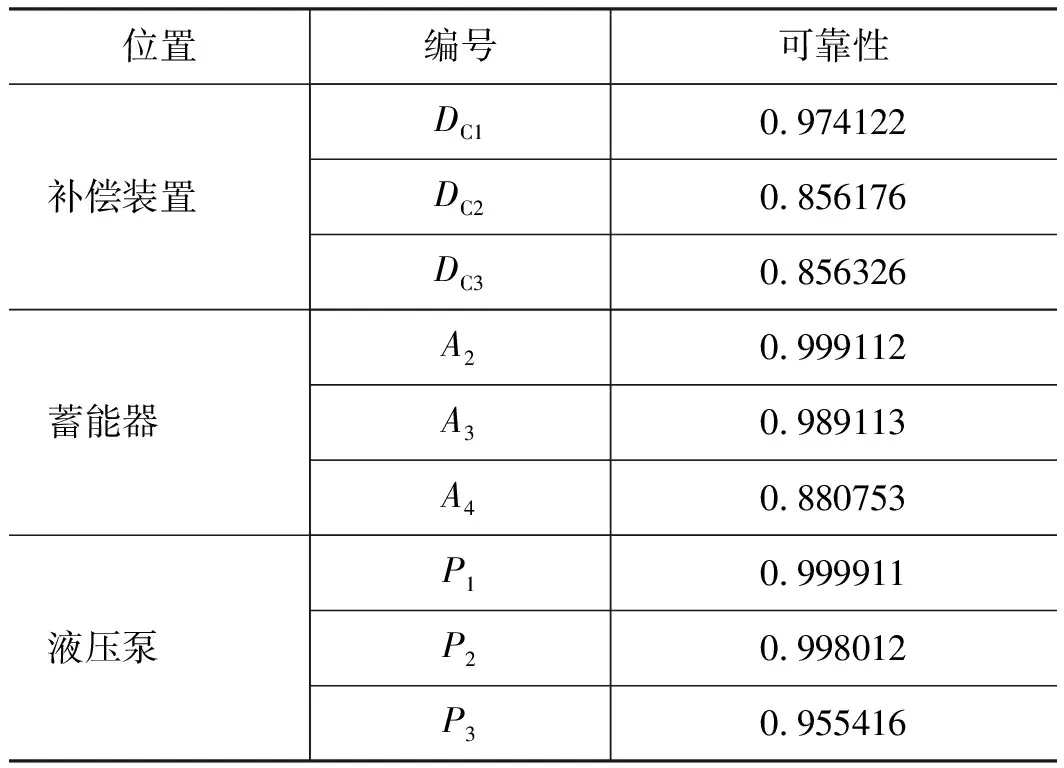
表3 500 h時(shí)各個(gè)構(gòu)型可靠性
2.2 成本評(píng)估方法
在不考慮成本因素時(shí),升沉補(bǔ)償系統(tǒng)可以通過(guò)增加冗余來(lái)提高可靠性,防止補(bǔ)償效率下降。對(duì)于實(shí)際的海洋作業(yè)裝備,成本問(wèn)題是升沉補(bǔ)償系統(tǒng)開(kāi)發(fā)及后續(xù)維護(hù)的一個(gè)重要約束指標(biāo),經(jīng)濟(jì)性也影響著商業(yè)化的發(fā)展。同時(shí),成本因素也是限制升沉補(bǔ)償系統(tǒng)可靠性和補(bǔ)償效率提升的主要因素之一。因此,本研究考慮成本為升沉補(bǔ)償系統(tǒng)多目標(biāo)構(gòu)型優(yōu)化的一個(gè)目標(biāo)函數(shù)。
升沉補(bǔ)償系統(tǒng)的成本C可以表示為:
C=CP+CA+CD1+CD2
(4)
式中,CP——泵組的采購(gòu)成本
CA——蓄能器組的采購(gòu)成本
CD1,CD2——補(bǔ)償裝置1和補(bǔ)償裝置2的采購(gòu)成本
表4列出了各個(gè)構(gòu)型的采購(gòu)成本,結(jié)合式(4),可計(jì)算出不同構(gòu)型的升沉補(bǔ)償系統(tǒng)的成本。
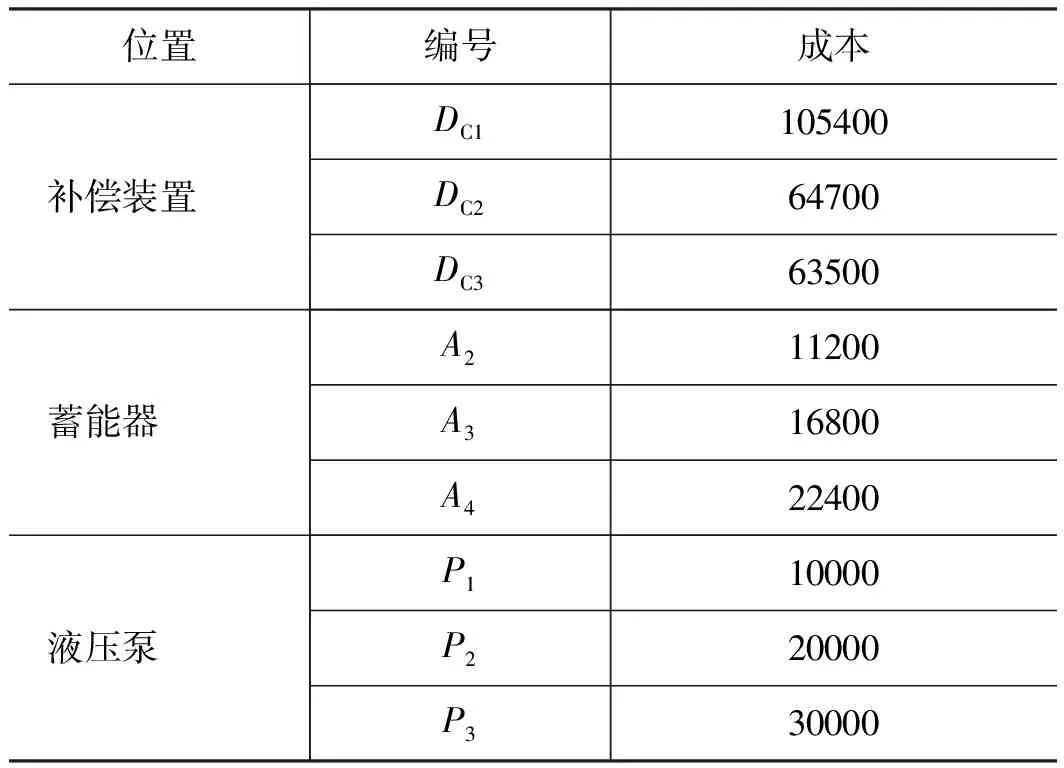
表4 各個(gè)構(gòu)型成本
2.3 補(bǔ)償效率評(píng)估方法
升沉補(bǔ)償系統(tǒng)設(shè)計(jì)的初衷就是為了補(bǔ)償海洋作業(yè)時(shí)母船受海浪影響造成的升沉運(yùn)動(dòng),因此補(bǔ)償效率是升沉補(bǔ)償系統(tǒng)的關(guān)鍵技術(shù)指標(biāo)。本研究利用AMESim軟件對(duì)于不同構(gòu)型的升沉補(bǔ)償系統(tǒng)進(jìn)行仿真,評(píng)估其補(bǔ)償效率。
不同構(gòu)型的補(bǔ)償裝置的補(bǔ)償效率定義為峰值抑制率,即:
(5)
式中,ηCi——補(bǔ)償裝置構(gòu)型i的補(bǔ)償效率(i=1, 2, 3)
Δh0——補(bǔ)償前負(fù)載運(yùn)動(dòng)的峰值
Δh——補(bǔ)償后負(fù)載運(yùn)動(dòng)的峰值
在單純的被動(dòng)式升沉補(bǔ)償系統(tǒng)中,蓄能器體積直接影響升沉補(bǔ)償系統(tǒng)剛度,對(duì)補(bǔ)償效率有明顯的影響。而在主被動(dòng)復(fù)合式升沉補(bǔ)償系統(tǒng)中,蓄能器僅在被動(dòng)補(bǔ)償時(shí)起到平衡靜態(tài)負(fù)載的作用;當(dāng)控制閥組驅(qū)動(dòng)主動(dòng)補(bǔ)償缸運(yùn)動(dòng)時(shí),只要蓄能器提供的流量滿足被動(dòng)補(bǔ)償缸的流量需求即可。通過(guò)AMESim仿真分析驗(yàn)證,當(dāng)同一構(gòu)型的補(bǔ)償裝置在分別連接不同有效體積的蓄能器時(shí),補(bǔ)償裝置的補(bǔ)償效果存在一定的差別,差別大概在毫米級(jí)別,相對(duì)較小。此外,根據(jù)AMESim仿真結(jié)果,1臺(tái)泵所提供的流量可以滿足設(shè)計(jì)工況的要求。基于以上兩點(diǎn),不同構(gòu)型的升沉補(bǔ)償系統(tǒng)的補(bǔ)償效率幾乎不受泵的構(gòu)型和蓄能器的參數(shù)影響,可以通過(guò)直接分析不同構(gòu)型補(bǔ)償裝置的補(bǔ)償效率來(lái)確定整個(gè)系統(tǒng)的補(bǔ)償效率。
本研究設(shè)計(jì)的升沉補(bǔ)償系統(tǒng)具有2套補(bǔ)償裝置,因此,將不同構(gòu)型的升沉補(bǔ)償系統(tǒng)的補(bǔ)償效率定義為2套補(bǔ)償裝置補(bǔ)償效率之和,即:
η=η1+η2
(6)
式中,η1和η2分別為補(bǔ)償裝置1和補(bǔ)償裝置2的補(bǔ)償效率。
通過(guò)AMESim仿真,補(bǔ)償裝置構(gòu)型1,2,3對(duì)于模擬海浪的補(bǔ)償效果分別如圖7所示,補(bǔ)償效率分別為94.0%,88.5%和89.6%。
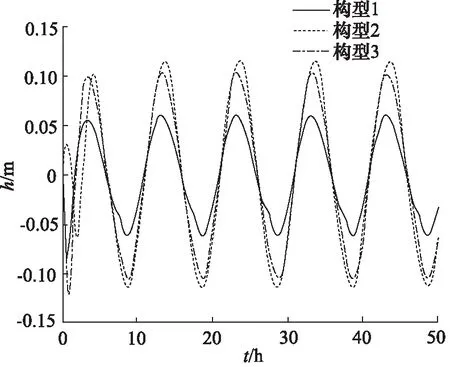
圖7 不同補(bǔ)償裝置構(gòu)型補(bǔ)償效率
3 升沉補(bǔ)償系統(tǒng)多目標(biāo)構(gòu)型優(yōu)化
3.1 非支配排序
在確定不同構(gòu)型的升沉補(bǔ)償系統(tǒng)多個(gè)目標(biāo)函數(shù)后,應(yīng)用多目標(biāo)優(yōu)化算法對(duì)不同構(gòu)型進(jìn)行評(píng)估,其流程圖如圖8所示。升沉補(bǔ)償系統(tǒng)評(píng)估為離散評(píng)估問(wèn)題,同時(shí)存在多個(gè)評(píng)價(jià)指標(biāo),選用離散非支配排序,得到Pareto前沿解集,對(duì)構(gòu)型數(shù)量的進(jìn)一步降級(jí)。
支配定義為:任意決策向量x1和x2,對(duì)于全部的目標(biāo)函數(shù)都有fi(x1)不比f(wàn)i(x2)差,且至少存在一個(gè)目標(biāo)函數(shù)滿足fj(x1)比f(wàn)j(x2)好,則認(rèn)為x1支配x2,x1是非支配的,x2是受支配的。如果某個(gè)解x不受其他解的支配,則稱這個(gè)解x為Pareto最優(yōu)解。由Pareto最優(yōu)解構(gòu)成的集合成為Pareto前沿解集。如圖9所示,構(gòu)型1支配構(gòu)型4,構(gòu)型2支配構(gòu)型5,構(gòu)型3支配構(gòu)型6,構(gòu)型1,2,3組成Pareto前沿解集,并且相互之間沒(méi)有支配關(guān)系。
本研究以可靠性、成本和補(bǔ)償效率作為升沉補(bǔ)償系統(tǒng)多目標(biāo)構(gòu)型優(yōu)化的目標(biāo)函數(shù),希望在成本最小化的同時(shí),可靠性和補(bǔ)償效率盡可能的高,因此,升沉補(bǔ)償系統(tǒng)的多目標(biāo)優(yōu)化問(wèn)題可表述為:
f={maxfR(i),minfC(i),maxfη(i)}
(7)
式中,fR(i)——升沉補(bǔ)償系統(tǒng)的可靠性
fC(i)——升沉補(bǔ)償系統(tǒng)的成本
fη(i)——升沉補(bǔ)償系統(tǒng)的補(bǔ)償效率
本研究采用非支配排序的方法求解Pareto前沿解集,在這種排序方法中,計(jì)算復(fù)雜度僅為O(MN2)。對(duì)所有構(gòu)型Y進(jìn)行分層,根據(jù)目標(biāo)函數(shù),計(jì)算所有構(gòu)型Y中支配構(gòu)型i的數(shù)量ni,同時(shí)將被構(gòu)型i所支配的所有構(gòu)型納入集合Si中。快速非劣分層的步驟為:
(1)在所有構(gòu)型Y中查找所有ni=0的構(gòu)型,并保存到集合F1中;
(2)當(dāng)前集合F1中存在的每個(gè)構(gòu)型i,被其支配的個(gè)體的集合為Si,對(duì)Si中每個(gè)構(gòu)型l進(jìn)行遍歷,然后執(zhí)行nl=nl-1,如果滿足條件nl=0,那么在集合H中保存l;
(3)將F1中的構(gòu)型視為首個(gè)非支配層個(gè)體,并把H視為當(dāng)前集合,重復(fù)上述的步驟,將所有構(gòu)型分層。
應(yīng)用非支配排序?qū)⑸裂a(bǔ)償系統(tǒng)的所有構(gòu)型進(jìn)行分層,獲得升沉補(bǔ)償系統(tǒng)的Pareto前沿解集,如圖10中圓圈所示。
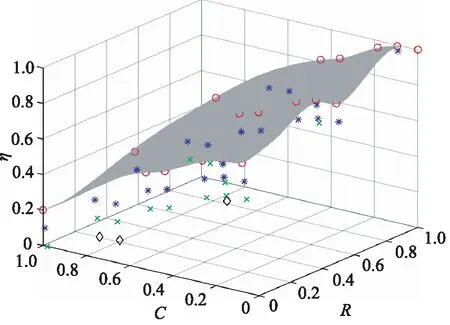
圖10 升沉補(bǔ)償系統(tǒng)Pareto前沿解集
3.2 層次分析法
多目標(biāo)優(yōu)化得到的不是一個(gè)最優(yōu)解,而是一組多目標(biāo)相互折中的Pareto前沿解集。優(yōu)化結(jié)果有多個(gè)可行解時(shí),如何在這些可行的目標(biāo)解中,尋找一個(gè)最好的優(yōu)化結(jié)果是進(jìn)一步提高升沉補(bǔ)償系統(tǒng)構(gòu)型優(yōu)化設(shè)計(jì)的關(guān)鍵問(wèn)題。應(yīng)用層次分析法把復(fù)雜的決策系統(tǒng)層次化,通過(guò)逐層比較多種關(guān)聯(lián)因素的重要性,為分析、決策提供定量的依據(jù)。其基本原理是根據(jù)問(wèn)題的性質(zhì)和所要達(dá)到的總目標(biāo),將其分解為不同的組成因素,依照因素間的隸屬關(guān)系和相互影響,按不同層次聚集組合后形成的一個(gè)多層次分析結(jié)構(gòu)模型,利用人的經(jīng)驗(yàn)對(duì)決策方案優(yōu)劣進(jìn)行排序,確定每一層的全部因素相對(duì)重要的權(quán)重值,進(jìn)而提出最優(yōu)方案。
圖11為層次分析法結(jié)構(gòu)圖,將得到升沉補(bǔ)償系統(tǒng)最優(yōu)構(gòu)型的目標(biāo)設(shè)置為目的層,將補(bǔ)償效率、可靠性、成本評(píng)價(jià)指標(biāo)作為準(zhǔn)則層,經(jīng)過(guò)Pareto優(yōu)化集合的各個(gè)構(gòu)型方案作為方案層。在建立升沉補(bǔ)償系統(tǒng)構(gòu)型優(yōu)化層次分析法模型以后,根據(jù)設(shè)計(jì)經(jīng)驗(yàn)和專家意見(jiàn),引入判斷矩陣,計(jì)算每個(gè)構(gòu)型的得分,以此確定升沉補(bǔ)償系統(tǒng)的最優(yōu)構(gòu)型。
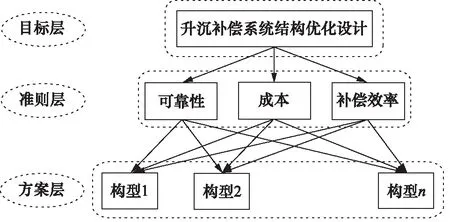
圖11 層次分析法的結(jié)構(gòu)圖
根據(jù)升沉補(bǔ)償系統(tǒng)各個(gè)目標(biāo)函數(shù)之間的相對(duì)重要性,構(gòu)建目標(biāo)函數(shù)之間的判斷矩陣B=(bij),bij表示第i個(gè)目標(biāo)函數(shù)相對(duì)第j個(gè)目標(biāo)函數(shù)的重要程度,bij的取值可根據(jù)表5確定。在判斷矩陣B中bij=1/bji,且對(duì)角線元素bii=0。
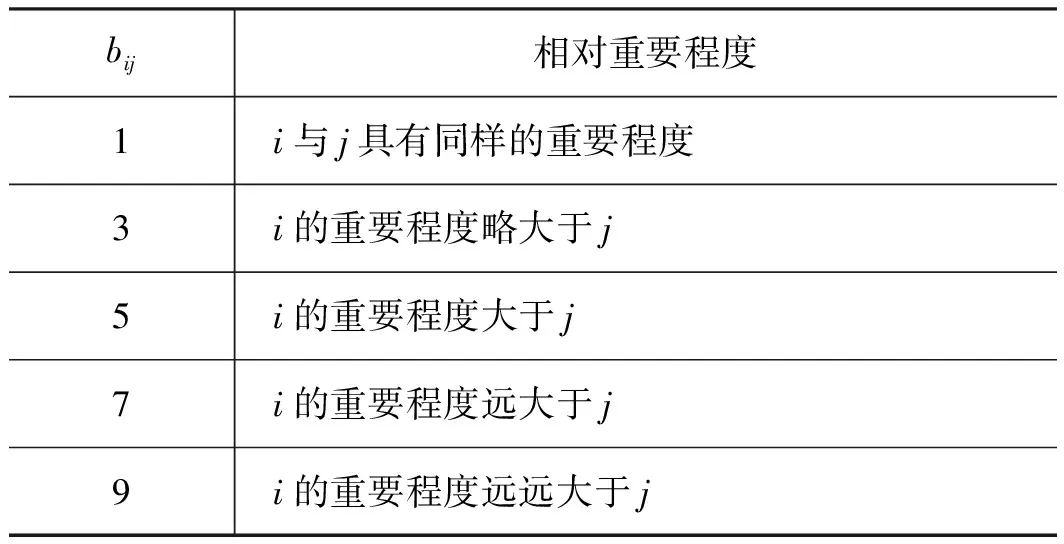
表5 判斷矩陣相對(duì)重要程度
在根據(jù)設(shè)計(jì)經(jīng)驗(yàn)和專家意見(jiàn)構(gòu)造判斷矩陣B后,需要對(duì)判斷矩陣B進(jìn)行一致性檢驗(yàn),目的是為了避免各個(gè)目標(biāo)函數(shù)之間的矛盾關(guān)系。例如,當(dāng)目標(biāo)函數(shù)1的重要程度大于目標(biāo)函數(shù)2,且目標(biāo)函數(shù)2的重要程度大于目標(biāo)函數(shù)3,則目標(biāo)函數(shù)1的重要程度必然大于目標(biāo)函數(shù)3,不可能存在目標(biāo)函數(shù)3的重要程度大于目標(biāo)函數(shù)1的情況。矩陣的一致性通常按照式(8)進(jìn)行判斷:
(8)
式中,K——判斷矩陣一致性指標(biāo)系數(shù)
λmax——判斷矩陣的最大特征根
n——判斷矩陣的階數(shù),本研究有3個(gè)目標(biāo)函數(shù),所以n取值為3
Ka——判斷矩陣的平均隨機(jī)一致性指標(biāo)系數(shù),當(dāng)n為3時(shí),Ka取值為0.58
ζ——判斷矩陣的隨機(jī)一致性比率,若ζ小于0.1,則說(shuō)明判斷矩陣滿足一致性要求;若判斷矩陣B不滿足一致性要求,則需要調(diào)整判斷矩陣的元素取值,并重新進(jìn)行一致性檢驗(yàn)
本研究根據(jù)升沉補(bǔ)償系統(tǒng)目標(biāo)函數(shù)之間的相對(duì)重要性給出了判斷矩陣B,考慮的目標(biāo)函數(shù)為可靠性、成本和補(bǔ)償效率。判斷矩陣B為:
(9)
經(jīng)檢驗(yàn),該矩陣滿足一致性要求。
根據(jù)判斷矩陣可以計(jì)算各個(gè)目標(biāo)函數(shù)的相對(duì)權(quán)重,首先計(jì)算判斷矩陣最大特征值λmax對(duì)應(yīng)的特征向量w,將w歸一化得到的歸一化向量W即為各個(gè)目標(biāo)函數(shù)的權(quán)重,本研究中可靠性、成本和補(bǔ)償效率的權(quán)值系數(shù)W為:
(10)
因此每個(gè)構(gòu)型的得分為:
S=ZW
(11)
得分最高的即為最佳構(gòu)型,根據(jù)層次分析法獲得的升沉補(bǔ)償系統(tǒng)最優(yōu)構(gòu)型集合為Vm={P2,A4,DC1,DC3}。
4 結(jié)論
本研究提出了一種升沉補(bǔ)償系統(tǒng)構(gòu)型的多目標(biāo)優(yōu)化方法。首先,根據(jù)工作原理分析和設(shè)計(jì)要求,液壓泵、蓄能器和補(bǔ)償裝置被確定為決策變量;然后,根據(jù)約束條件確定符合條件的升沉補(bǔ)償系統(tǒng)構(gòu)型解集,分別給出了可靠性、成本和補(bǔ)償效率的評(píng)估方法;再利用非支配排序獲得升沉補(bǔ)償系統(tǒng)的Pareto前沿,進(jìn)一步縮小構(gòu)型范圍,在此基礎(chǔ)上構(gòu)造判斷矩陣、利用層次分析法綜合評(píng)定Pareto前沿中每個(gè)構(gòu)型的分?jǐn)?shù),最終獲得了升沉補(bǔ)償系統(tǒng)的最優(yōu)構(gòu)型。后續(xù)工作將關(guān)注拓展升沉補(bǔ)償系統(tǒng)的構(gòu)型空間,同時(shí)對(duì)實(shí)際系統(tǒng)的可靠性、成本和補(bǔ)償效率進(jìn)行更加全面和準(zhǔn)確的評(píng)估,以進(jìn)一步尋找最優(yōu)構(gòu)型。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
甘肅教育(2020年14期)2020-09-11 07:57:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
時(shí)代英語(yǔ)·高二(2015年1期)2015-03-16 00:08:11
