液壓馬達(dá)變負(fù)載恒速控制動態(tài)特性對比
2022-09-16 01:21:26劉杰
液壓與氣動 2022年8期
劉 杰
(1.中國煤炭科工集團(tuán)太原研究院有限公司,山西 太原 030006;2.山西天地煤機(jī)裝備有限公司,山西 太原 030006;3.煤礦采掘機(jī)械裝備國家工程實驗室,山西 太原 030006)
引言
在工程機(jī)械中,液壓馬達(dá)由于其功率密度比大、體積質(zhì)量小、效率高等特點被廣泛應(yīng)用。特別是在行走機(jī)械中,液壓馬達(dá)用于旋轉(zhuǎn)副的大扭矩傳遞,如挖機(jī)的回轉(zhuǎn)液壓馬達(dá)、煤礦機(jī)械的行走馬達(dá)和輸送馬達(dá)等[1-3]。
液壓馬達(dá)在工作過程中由于工況復(fù)雜性,其負(fù)載不斷變化,馬達(dá)泄漏增加會導(dǎo)致其速度產(chǎn)生波動,嚴(yán)重影響工作的穩(wěn)定性和可靠性[4-5]。工程機(jī)械中有3種保持液壓馬達(dá)恒速工作的方法:變轉(zhuǎn)速電機(jī)控制、閥控制、泵控制。3種不同的恒速控制方法具有不同的響應(yīng)特性,在使用過程中往往只是通過經(jīng)驗選擇恒速控制模型。對比研究3種馬達(dá)調(diào)速方式的動態(tài)特性,有助于在不同工況或不同要求下選擇不同的馬達(dá)恒速控制模型。
1 液壓馬達(dá)恒速控制原理
1.1 變轉(zhuǎn)速電機(jī)控制原理
圖1為電機(jī)控制實現(xiàn)馬達(dá)恒速的原理框圖。初始狀態(tài)下,輸入信號到電機(jī)使其轉(zhuǎn)動,帶動定量泵工作。液壓泵將電機(jī)的機(jī)械能轉(zhuǎn)化為壓力能,驅(qū)動液壓馬達(dá)轉(zhuǎn)動工作,同時通過轉(zhuǎn)速傳感器將馬達(dá)轉(zhuǎn)速反饋到PID控制器。當(dāng)液壓馬達(dá)所受負(fù)載增大時,由于泄漏損失增大等原因使其轉(zhuǎn)速下降,此時通過PID控制器形成閉環(huán),可自動改變電機(jī)的輸入信號,調(diào)節(jié)轉(zhuǎn)速,以使泵與馬達(dá)實現(xiàn)流量自適應(yīng)匹配。在此種馬達(dá)恒速控制原理中,電機(jī)轉(zhuǎn)速需不斷變化以匹配變負(fù)載情況,因此需使用變頻電機(jī)等變轉(zhuǎn)速電機(jī)作為泵的驅(qū)動電機(jī)。
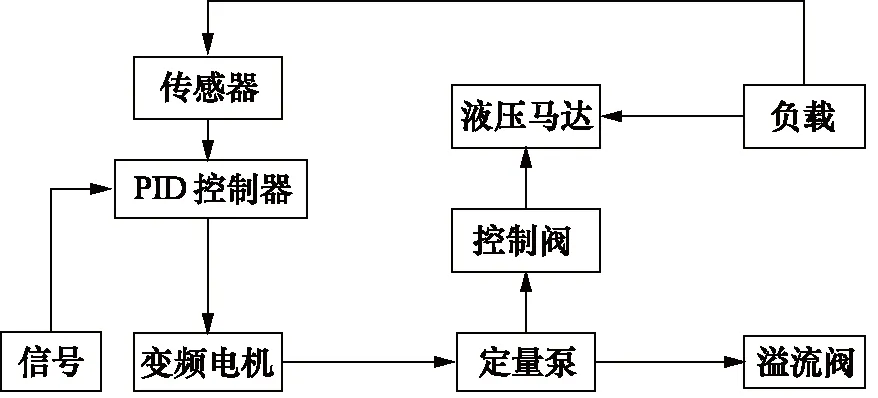
圖1 變轉(zhuǎn)速電機(jī)控制原理
1.2 閥控制原理
圖2為閥控制實現(xiàn)馬達(dá)恒速控制原理框圖。初始狀態(tài)下,恒速電機(jī)帶動定量泵工作,壓力油通過比例閥至液壓馬達(dá),驅(qū)動液壓馬達(dá)轉(zhuǎn)動工作,同時通過轉(zhuǎn)速傳感器將馬達(dá)轉(zhuǎn)速反饋到PID控制器。初始信號輸入比例閥,使其提供一定流量以適應(yīng)馬達(dá)初始負(fù)載。當(dāng)液壓馬達(dá)所受負(fù)載增大時,轉(zhuǎn)速的下降反饋到PID控制器,使其自動改變比例閥輸入信號,增大液壓馬達(dá)輸入流量以彌補(bǔ)其損失。在此種馬達(dá)恒速控制原理中,馬達(dá)的輸入流量需不斷變化以彌補(bǔ)負(fù)載增大時的泄漏損失,因此需使用比例閥作為控制閥。

圖2 閥控制原理
1.3 泵控制原理
圖3為泵控制實現(xiàn)馬達(dá)恒速控制的原理框圖。初始狀態(tài)下,初始信號輸入電比例排量泵,此時泵以一定排量工作。恒速電機(jī)帶動電比例排量泵轉(zhuǎn)動,壓力油流至液壓馬達(dá),驅(qū)動液壓馬達(dá)轉(zhuǎn)動工作,同時轉(zhuǎn)速傳感器將馬達(dá)轉(zhuǎn)速反饋到PID控制器。當(dāng)液壓馬達(dá)所受負(fù)載增大時,轉(zhuǎn)速下降信號反饋到PID控制器,通過與初始信號對比,自動改變泵的輸入信號使其變排量,以實現(xiàn)泵與馬達(dá)的流量自適應(yīng)匹配。此種馬達(dá)恒速控制原理中,泵的排量需要隨輸入信號不斷變化,因此需使用電比例排量泵作為液壓動力元件。

圖3 泵控制原理
2 液壓馬達(dá)恒速控制數(shù)學(xué)模型
2.1 變轉(zhuǎn)速電機(jī)控制數(shù)學(xué)模型
假設(shè)變轉(zhuǎn)速電機(jī)為永磁同步電機(jī),由文獻(xiàn)[6-7]可知,永磁同步電機(jī)的電磁轉(zhuǎn)矩為:
Te=1.5PnIssinβ(ψf+Ld-LqIscosβ)
(1)
式中,Te——電磁轉(zhuǎn)矩,N·m
Pn——電機(jī)的極對數(shù)
Is——定子電流空間向量,A
β——定子電流空間向量與兩相旋轉(zhuǎn)標(biāo)系d-q軸中d軸的夾角,rad
ψf——轉(zhuǎn)子的磁鏈,Wb
Ld——兩相旋轉(zhuǎn)坐標(biāo)系d軸電感,H
Lq——兩相旋轉(zhuǎn)坐標(biāo)系q軸電感,H
電機(jī)的機(jī)械運動扭矩方程為:
(2)
式中,TL——電機(jī)負(fù)載轉(zhuǎn)矩,N·m
Jem——電機(jī)轉(zhuǎn)動慣量,kg·m2
ωe——電機(jī)角速度,rad/s
Bem——電機(jī)的阻尼系數(shù),N·m·s/rad
伺服控制器的輸入電壓與電機(jī)角速度成比例關(guān)系,則有:
ωe=kuei
(3)
式中,k——轉(zhuǎn)換系數(shù),rad/(s·V)
uei——伺服控制器輸入電壓,V
電機(jī)與泵連接,則有扭矩平衡方程:
(4)
式中,Dp——泵的排量,m3/r
pp——泵的輸出壓力,MPa
Bp——泵的阻尼系數(shù),N·m·s/rad
ωp——泵的角速度,rad/s
Jp——泵的轉(zhuǎn)動慣量,kg·m2
泵的流量方程為:
Qp=Dpωp-CipΔpp-Coppp
(5)
式中,Qp——泵輸出的流量,m3/s
Cip——泵的內(nèi)泄系數(shù),m5/(N·m)
Δpp——泵進(jìn)出口壓差,MPa
Cop——泵的外泄系數(shù),m5/(N·m)
馬達(dá)的流量方程為:

(6)
式中,Qm——馬達(dá)的輸入流量,m3/s
Dm——馬達(dá)排量,m3/r
θm——馬達(dá)的轉(zhuǎn)角,rad
Cim——馬達(dá)的內(nèi)泄系數(shù),m5/(N·m)
Δpm——馬達(dá)進(jìn)出口壓差,MPa
Com——馬達(dá)的內(nèi)泄系數(shù),m5/(N·m)
pm——馬達(dá)高壓腔的壓力,MPa
V0——馬達(dá)高壓腔體容積,m3
βm——馬達(dá)有效容積的彈性模量,N/m2
馬達(dá)在外負(fù)載的作用下有力矩平衡:
(7)
式中,Jm——馬達(dá)負(fù)載轉(zhuǎn)動慣量總和,kg·m2
Bm——馬達(dá)和負(fù)載的阻尼系數(shù)和,
N·m·s/rad
G——馬達(dá)外負(fù)載彈簧剛度,N·m/rad
T′——施加在馬達(dá)上的外負(fù)載,N·m
由于此種控制模式中,電機(jī)角速度等于泵的角速度,泵的輸出壓力等于馬達(dá)高壓腔的壓力,泵的輸出流量等于馬達(dá)的輸入流量,即有:
(8)
同時聯(lián)立式(1)~式(7)即為變轉(zhuǎn)速電機(jī)控制馬達(dá)轉(zhuǎn)速的數(shù)學(xué)模型,此處不再贅述。
2.2 閥控制數(shù)學(xué)模型
閥控制馬達(dá)機(jī)轉(zhuǎn)速的最大特點是需使用比例閥,由文獻(xiàn)[8-12]可知,比例閥的流量方程為:
Qv=Kqxv-Kcpv
(9)
式中,Qv——比例閥輸出流量,m3/s
Kq——比例閥的流量增益,m3/(s·A)
xv——閥芯的位移,m
Kc——壓力流量比例系數(shù),m5/(N·s)
pv——比例閥輸出壓力,MPa
比例閥輸入電流與閥芯位移之間的關(guān)系為:
(10)
式中,KI——比例閥的電流力增益系數(shù),N/A
ivi——比例閥的輸入電流,A
mv——閥芯的質(zhì)量,kg
mT——銜鐵的組件質(zhì)量,kg
Bv——閥芯與銜鐵間阻尼系數(shù),N·s/m
BT——銜鐵組件的阻尼系數(shù),N·s/m
kv——綜合剛度,N/m
此種控制模式中,馬達(dá)輸入流量等于比例閥輸出流量,即有:
Qm=Qv
(11)
同時聯(lián)立式(6)、式(7)即為閥控馬達(dá)轉(zhuǎn)速的數(shù)學(xué)模型,此處不再贅述。
2.3 泵控制數(shù)學(xué)模型
泵控馬達(dá)轉(zhuǎn)速與閥控馬達(dá)轉(zhuǎn)速的不同在于,閥控系統(tǒng)由比例閥直接控制馬達(dá)的輸入流量,泵控系統(tǒng)則由比例閥控制變量活塞,同時可帶動變量泵斜盤傾角的變化,從而改變泵的排量以實現(xiàn)與馬達(dá)負(fù)載的匹配,如圖4所示。因此,建立泵控馬達(dá)轉(zhuǎn)速的數(shù)學(xué)模型,除了前述的公式外,還需泵變量活塞和斜盤等的數(shù)學(xué)模型公式。

圖4 泵控控制框圖
變量活塞為雙作用的對稱液壓缸,因此油缸的力平衡公式為:
(12)
式中,Ac——雙作用缸有效面積,m2
Δpc——雙作用缸兩腔體壓力差,MPa
mc——雙作用缸及負(fù)載總質(zhì)量,kg
y——雙作用缸的位移,m
Bc——雙作用缸與負(fù)載阻尼系數(shù),N·s/m
K——雙作用缸與負(fù)載彈簧剛度,N/m
Fc——雙作用缸負(fù)載力,N
雙作用缸的流量平衡公式為:
(13)
式中,Qc——雙作用缸負(fù)載流量,m3/s
Cic——雙作用缸泄漏系數(shù),m5/(N·m)
Vc——雙作用缸容積和,m3
βc——雙作用缸綜合的彈性模量,MPa
雙作用缸的位移與斜盤之間的轉(zhuǎn)換關(guān)系為:
y=Lα
(14)
式中,L——雙作用缸到斜盤鉸點距離,m
α——斜盤的傾角,rad
在此種控制模式中,比例閥輸出壓力等于雙作用缸兩腔體壓力差,即有:
pv=Δpc
(15)
同時聯(lián)立式(5)~式(7)、式(9)、式(10)即為泵控馬達(dá)轉(zhuǎn)速的數(shù)學(xué)模型,此處不再贅述。
分析上述的數(shù)學(xué)模型可以發(fā)現(xiàn),泵控比閥控多了變量活塞及斜盤的中間環(huán)節(jié),控制流程增多,控制更精確,可以預(yù)測泵控的響應(yīng)時間會比閥控時間長,泵控的超調(diào)量會比閥控小。變轉(zhuǎn)速電機(jī)控制由于控制多元復(fù)雜性無法預(yù)測,可通過實驗進(jìn)行進(jìn)一步驗證。
3 實驗與分析
為了分析3種馬達(dá)恒速控制的動態(tài)響應(yīng),使用山西天地煤機(jī)的加載實驗臺進(jìn)行實驗。
針對馬達(dá)工作時的變負(fù)載工況,采用加載馬達(dá)對實驗馬達(dá)進(jìn)行加載實驗,加載實驗原理如圖5所示。通過泵和馬達(dá)選型匹配及PID控制,以馬達(dá)轉(zhuǎn)速1500 r/min為優(yōu)化目標(biāo)進(jìn)行實驗。在加載馬達(dá)出口安裝比例溢流閥來調(diào)節(jié)加載壓力pLoad。加載工況曲線如圖6所示。可以看到,初始加載壓力為5 MPa,在第2.5秒加載壓力突變?yōu)?0 MPa,并在2.5 s后恢復(fù)為5 MPa,如此反復(fù)分別加載10, 15, 20 MPa 3種壓力等級。

圖5 加載實驗原理圖

圖6 馬達(dá)加載壓力
圖7為變轉(zhuǎn)速電機(jī)馬達(dá)恒速控制的動態(tài)響應(yīng)曲線,在每一次加載壓力切換時,由于壓力沖擊等原因使馬達(dá)轉(zhuǎn)速存在上下波動,且壓力階躍值越大,電機(jī)的轉(zhuǎn)速波動幅值越大,PID控制的超調(diào)量越大。在此種控制下,馬達(dá)在變負(fù)載時可以實現(xiàn)快速的恒速調(diào)節(jié),但整體控制不太平穩(wěn),轉(zhuǎn)速波動次數(shù)較多。

圖7 變轉(zhuǎn)速電機(jī)控制動態(tài)響應(yīng)
圖8為閥控馬達(dá)恒轉(zhuǎn)速控制的動態(tài)響應(yīng)曲線,在每一次加載壓力切換時,在壓力沖擊的作用下也會導(dǎo)致馬達(dá)轉(zhuǎn)速上下波動。PID控制的超調(diào)量較大,但響應(yīng)速度較快,可以實現(xiàn)馬達(dá)變負(fù)載下轉(zhuǎn)速的快速回正。

圖8 閥控動態(tài)響應(yīng)
圖9為泵控馬達(dá)恒轉(zhuǎn)速控制的動態(tài)響應(yīng)曲線,在加載壓力切換時,馬達(dá)轉(zhuǎn)速上下波動,加載壓力與波動幅值正相關(guān)。在PID控制調(diào)節(jié)下,馬達(dá)轉(zhuǎn)速可恢復(fù)為1500 r/min,且整體控制相對比較平穩(wěn),超調(diào)量小。與此同時,泵控馬達(dá)恒轉(zhuǎn)速控制的響應(yīng)時間較長,大于變轉(zhuǎn)速電機(jī)和閥控系統(tǒng)。

圖9 泵控動態(tài)響應(yīng)
將3種控制模式的最大超調(diào)量ζ匯總對比,如圖10所示。閥控系統(tǒng)最大超調(diào)量在3種加載壓力下均為最大,泵控系統(tǒng)的最大超調(diào)量最小,且這種特征在15 MPa時最為明顯,在加載壓力值為10 MPa和20 MPa時,變轉(zhuǎn)速電機(jī)控制與泵控系統(tǒng)最大超調(diào)量接近。

圖10 最大超調(diào)量對比
將3種控制最大超調(diào)量的上升時間tr匯總,如圖11所示。閥控系統(tǒng)上升時間在3種加載壓力下均為最小,泵控系統(tǒng)的上升時間最大,變轉(zhuǎn)速電機(jī)上升時間處于兩者中間。

圖11 最大上升時間對比
分析以上3種控制方式的最大超調(diào)量、上升時間可以發(fā)現(xiàn),實驗結(jié)果與數(shù)學(xué)模型中的預(yù)測結(jié)果相同。
以上結(jié)果可以指導(dǎo)在不同工況和工作條件下選擇合適的馬達(dá)轉(zhuǎn)速控制方法。當(dāng)系統(tǒng)要求馬達(dá)調(diào)速響應(yīng)快而對轉(zhuǎn)速波動敏感度較低時,可以選擇閥控調(diào)速;當(dāng)系統(tǒng)要求控制平穩(wěn)而對響應(yīng)時間無過大要求時可以選擇泵控系統(tǒng);當(dāng)工況普通無過多要求時變轉(zhuǎn)速電機(jī)控制是較好的選擇。
4 結(jié)論
本研究通過數(shù)學(xué)模型構(gòu)建、實驗驗證等方法對液壓馬達(dá)變負(fù)載恒速控制的3種方法——變轉(zhuǎn)速電機(jī)控制、閥控制、泵控制的動態(tài)特性進(jìn)行比較分析,結(jié)論如下:
(1)閥控系統(tǒng)響應(yīng)時間快,超調(diào)量大;泵控系統(tǒng)響應(yīng)時間慢,超調(diào)量小,調(diào)速平穩(wěn);變轉(zhuǎn)速電機(jī)控制的特性處于兩者之間,但調(diào)速不太平穩(wěn),波動次數(shù)多;
(2)可根據(jù)以上調(diào)速特性針對不同的工作情況選擇不同的調(diào)速方式,本研究為PID控制器在3種控制方式上的應(yīng)用研究,也可探究模糊控制、神經(jīng)網(wǎng)絡(luò)控制等智能控制在3種調(diào)速方式的響應(yīng)特性區(qū)別。
