基于BP神經網絡的SCARA機器人故障診斷
2022-09-16 07:33:46邵建浩張婷
機床與液壓
2022年14期
邵建浩,張婷
(上海工程技術大學機械與汽車工程學院,上海 201620)
0 前言

BP神經網絡是一種典型的人工神經網絡,具有優越的非線性映射能力,所以在故障診斷領域得到了廣泛應用。湖北工業大學將BP神經網絡應用在礦用減速箱的故障診斷中,準確預測了礦用減速箱故障。青島大學用GA-ACO-BP算法更加準確和快速地診斷了行星齒輪箱故障。山東理工大學將GA-BP神經網絡用于光伏陣列故障檢測。
本文作者在ADAMS軟件中導入SCARA機器人模型,測得其運動時大臂前后端、小臂前后端及底座端加速度數據,在MATLAB中運用BP神經網絡對其進行故障的智能識別與分類,驗證該模型的準確性。
1 SCARA機器人
SCARA機器人結構簡圖如圖1所示,SCARA機器人由大臂、小臂、底座等部件組成,有4個自由度(3個轉動和1個移動),1個運動周期為2 s,大臂向左旋轉90°,小臂向左旋轉180°后回到原位,同時末端執行器螺旋式下降到最低點再回到原位耗時1 s,為前半個周期;大臂向右旋轉90°,小臂向右旋轉180°后回到原位,同時末端執行器螺旋式下降到最低點再回到原位耗時1 s,為后半個周期。
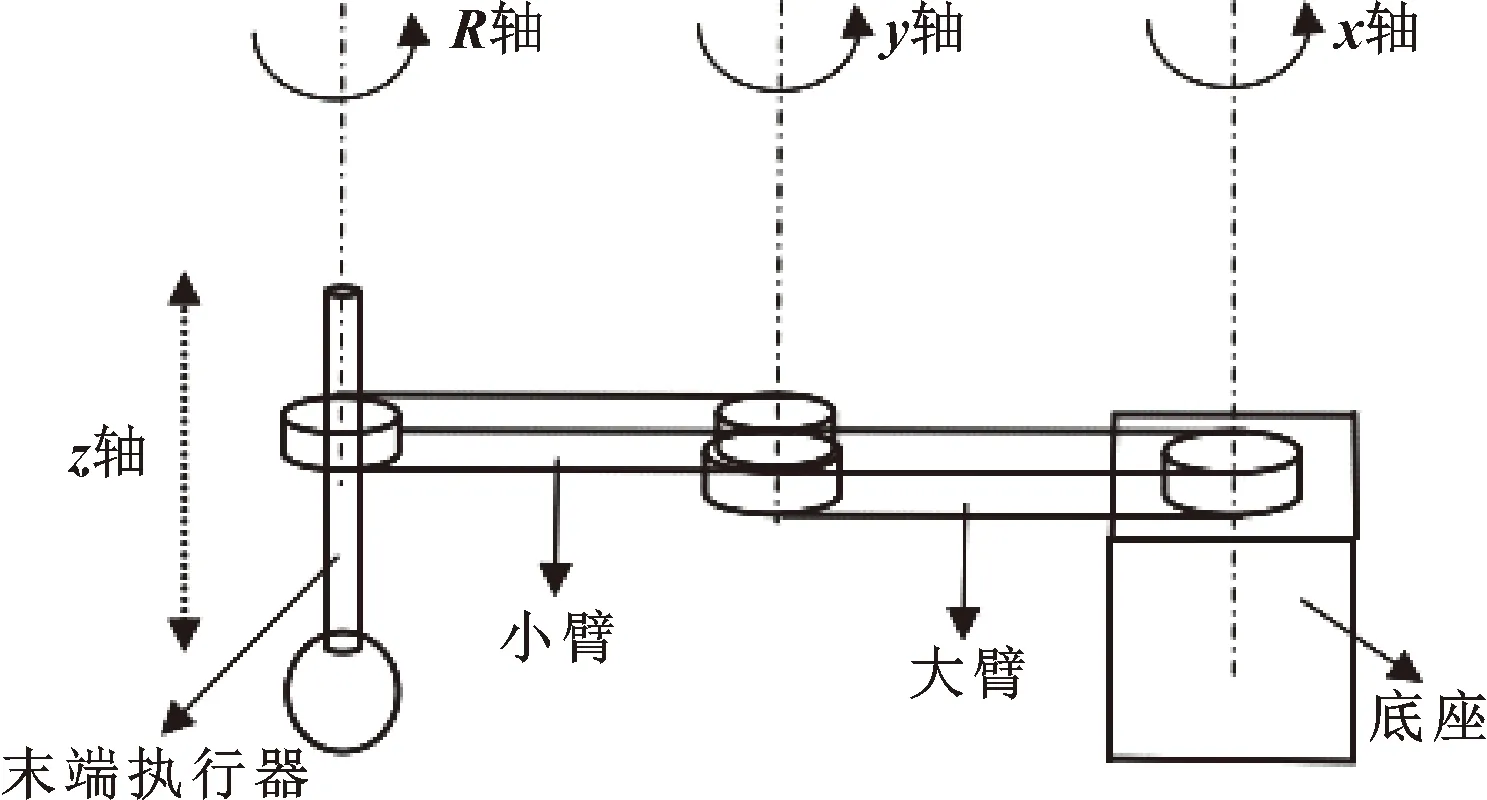
圖1 SCARA機器人結構簡圖
由于SCARA機器人體積小,減少了生產線所需空間,并具有可在平面搬運、挑揀、裝配等特點,特別適用于3C制造業。近年來,由于工業級產品更新速度也出現類似3C類產品的趨勢,所以3C行業眾多EMS工廠開始大量使用SCARA機器人。隨著SCARA機器人應用愈加廣泛,其安全性問題也顯得越來越重要。因此,為避免因機器人故障帶來的安全問題及經濟損失,對SCARA機器人的故障診斷更加重要。……
登錄APP查看全文
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
汽車維修與保養(2019年7期)2020-01-06 03:30:42
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31
河南科技(2014年3期)2014-02-27 14:05:48
