深埋藏斷層發育采煤工作面自動化技術研究及應用實踐
2022-09-14 09:01:34呂瑞騰查守華
山東煤炭科技 2022年8期
呂瑞騰 查守華 張 蘇
(山東省天安礦業集團有限公司,山東 濟寧 273100)
1 工程概況
星村煤礦7302 工作面結構復雜,埋深大,構造多,各生產工序繁瑣,正常生產期間出勤人數超過30 人,工人勞動強度大,與現階段我國煤礦生產少人化、自動化趨勢嚴重不符。
2 自動化建設情況
2.1 建設情況
通過對7302 綜采工作面現有設備系統的改造,在應用過程中的不斷改進,在人工現場干預的情況下,前期實現記憶割煤、自動跟機移架、自動推移刮板輸送機、乳化液自動調配、設備一鍵啟停等功能[1]。后期通過不斷摸索完善,最終實現遠程操控工作面生產,根據實際生產條件,自動調整設備運轉參數,實現工作面部分工序的智能化生產。
2.2 五大系統建設
2.2.1 工作面監控中心
工作面監控中心是綜采自動化的大腦,擔負綜采工作面自動化的遠程集中監控職責。工作面監控中心布置在工作面集中控制臺,位于工作面進風順槽,超前工作面300 m 處,主要由主控計算機、操作臺、本安顯示器及交換機等組成。主控計算機是核心部件,負責回采工作面自動化系統井下主要控制職能。顯示器主要顯示液壓支架、刮板輸送機、轉載機等主要設備運行狀況。操作臺是工作面遠程操控的主要執行單位,7302 綜采工作面配備兩臺本安型操控臺,一臺負責液壓支架及乳化液泵站遠程控制,一臺負責采煤機及三機遠程控制。
2.2.2 監測系統
監測系統是自動化回采工作面的神經,實時監測7302 工作面主要設備運行情況。監測系統主要包括:采煤機運行工況監測,監測采煤機運行速度、運行位置、軸承的溫度、截割高度、機身仰俯角等運行信息[2];輸送機監測系統,監測刮板輸送機、轉載機工作的鏈速電流、工作電壓、功率、液壓系統壓力、郵箱溫度等輸送機運行狀態及設備完好狀況;液壓支架工況監測,主要監測各支架支撐高度、工作阻力、推移行程等參數[3];乳化液泵站監測系統,主要監測泵站出口壓力、泵站油溫、油箱油位等參數;各類電器設備工況監測,監測工作面各類變壓器、組合開關運行負荷,包括漏電、斷相、過載保護完好情況。
2.2.3 信息傳輸系統
信息傳輸系統相當于自動化系統的血脈,是自動化回采工作面各設備進行信息交換的路徑。7302工作面信息傳輸系統由礦用隔爆兼本安型穩壓電源、本安型網絡交換機、本安型綜合接入器、本安型光電轉換器、連接器、光纜等組成,通過礦用光纜連接,接入礦井工業以太環網,可實現地面實時監測、遠程操控工作面設備運轉。
2.2.4 工作面視頻系統
工作面視頻系統是自動化回采的雙眼,由礦用本質安全型攝像儀、礦用本質安全型顯示器、礦用本安型操作臺、安裝電纜及附件等組成。工作面每3 個支架安裝1 臺礦用本質安全型攝像儀,攝像儀分別安裝于支架頂梁及前梁上,實現采煤機、煤壁及人行通道的實時監測。
2.2.5 電液控系統
電液控系統是實現液壓支架自動化操作的核心系統。系統元件主要包括電液控操作閥、壓力傳感器、行程傳感器、回液過濾站、高壓反沖洗過濾站、液壓過濾裝置及乳化液自動配比裝置等核心部件組成,其中電液控換向閥是主要執行元件。
通過采煤機、三機、泵站控制系統、電液控制系統、供電系統、語音通訊控制系統等具備檢測功能并開放相應的通訊接口、數據及遠程控制權限,實現了五大主要系統相互通訊,集成于監控中心統一控制。
3 實踐成果及技術研究
3.1 實踐成果
3.1.1 記憶割煤
人工操作采煤機割一刀煤后,采煤機記憶截割路徑及主要截割參數,如煤層傾角、煤層厚度變化,并自動進行參數設置后,按照設置參數進行自動割煤。如工作煤層賦存條件或者截割工藝發生變化,可進行人工干預,修改采煤機運行參數,調整采高、煤機提剎刀角度、端頭斜切進刀距離等參數,干預內容均可寫入記憶[3]。
3.1.2 自動跟機移架推溜
實現單架或成組自動控制功能,可以按照事先設定的參數,既能實現單個支架的“推、降、移、升”動作的自動控制功能,也可進行成組自動移架、成組自動推溜、成組自動伸收前梁、成組自動伸收伸縮梁等功能。
3.1.3 綜采設備遠程監控
刮板輸送機、轉載機、破碎機、膠帶輸送機、泵站系統的工作狀態遠程監測監控、常見故障診斷預警、“一鍵”啟停及設備聯動閉鎖控制。能夠在監控中心對綜采設備數據集成、處理、故障診斷,并且當工作面自動化控制系統出現故障時,各子系統不受工作面控制系統控制,能夠保證在檢修和工作面控制系統出現故障時,各子系統能單獨運行,確保生產不受影響。
3.2 技術研究
3.2.1 關鍵參數確定
(1)端頭斜切進刀。傳統人工跟機推移刮板輸送機,支架工、采煤機司機相互配合完成端頭斜切進刀,操作靈活,可根據實際情況進行調整。自動化采煤,一旦設定參數,即按照設定參數進行。端頭斜切進刀長度過長,影響效率,進刀長度過短,會導致刮板輸送連接部位及采煤機搖臂鉸接機構受力損壞[4]。根據7302 工作面煤層賦存情況及設備配套情況,通過不斷摸索,最終確定端頭斜切進刀段等于刮板輸送機最大可彎曲長度1.5 倍,定為30 m。7302 自動化工作面進刀示意圖如圖1。
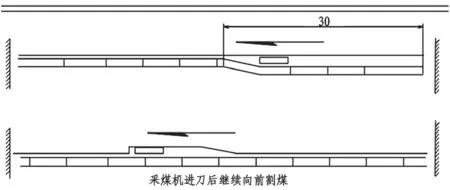
圖1 7302 自動化工作面進刀示意圖(m)
(2)自動跟機移架、推溜參數確定。跟機移架滯后采煤機距離過小,煤機和支架相互干擾,處理不當甚至會出現煤機割支架,移架滯后割煤距離過遠,不利于頂板管理[5]。綜合考慮刮板輸送機最大彎曲角度、煤機運行速度及頂板情況,最終自動化操作系統設置滯后采煤機20 m 推移刮板輸送機,移架滯后采煤機后滾筒3 架,成組移架,每組拉移6 架,頂板破碎區域人工干預,緊跟采煤機前滾筒移架,單個移架。
3.2.2 采煤自動化難點探究
(1)頂板破碎區段自動拉移支架難點探索。頂板破碎區域頂板拉移是現階段自動化回采工作面難點,一直未得到有效解決。如設定支架初撐力為升架動作關鍵參數,因頂板破碎,支架頂梁接頂不實,在未達到初撐力前,會一直執行升架動作,導致與相鄰支架咬架、擠架,大面頂板破碎區域還會出現歪架、倒架。通過實際使用過程中的摸索,最終通過將支架支撐高度與初撐力兩項關鍵參數作為支架升架動作中止參數,根據不同頂板狀況設置兩參數優先級,頂板破碎區域將升架高度作為升架終止動作的參數,頂板完整區域將支架初撐力作為中止升架動作關鍵參數,頂板破碎區支架自動化操作問題得到一定程度解決。
(2)記憶割煤難點探索。采煤機割煤自動化是通過記錄已割煤區域煤層賦存條件,設定采高、傾角等關鍵參數,對于傾角變化較大煤層,或是工作面通過構造時,采煤機煤巖識別功能還未實現,如按照設定參數進行記憶割煤,會出現割頂底板巖石。通過對回采工作面兩順槽進行全面測量,構造發育、煤層傾角變化區段增加測點密度,通過實際測量,構建工作面煤層三維賦存圖,提前輸入煤機截割控制系統,煤機根據煤層賦存情況,實時調整提剎刀角度,無需進行煤巖識別,解決了因煤層傾角變化,割頂割底的問題。
4 結語
星村煤礦7302 工作面生產實現割煤、移架、推移刮板輸送機、拉移轉載機等主要生產工序自動化,工作面參與生產人數已由原來的30 人左右降至16 人以下,工人勞動效率提高一倍以上。通過設定合理升架中止動作參數,初步解決頂板破碎區域自動拉移支架難題;通過繪制工作面煤層賦存三維立體圖,設定采煤機合理運行參數,解決記憶割煤煤巖識別問題、采煤機割頂、割底難題。
猜你喜歡
保健醫苑(2022年5期)2022-06-10 07:46:12
防爆電機(2022年1期)2022-02-16 01:14:06
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
河北畫報(2021年2期)2021-05-25 02:07:50
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
山西大同大學學報(自然科學版)(2016年2期)2016-12-12 03:19:28
沈陽醫學院學報(2014年4期)2014-12-27 13:44:20
航天器工程(2014年5期)2014-03-11 16:35:55
河南科技(2014年18期)2014-02-27 14:14:58
