多模態撓性與慣量模擬器設計
2022-09-14 06:36:54孔繁征杜江山黃鐵球
科學技術創新 2022年25期
孔繁征,杜江山,黃鐵球*
(北京交通大學機械與電子控制工程學院,北京 100044)
與計算機仿真、半實物仿真相比,全物理仿真是依據某些重要物理參數開發的模型,逼真度最高,可與真實物理場景吻合,結果可信度最高[1,2]。目前,航天器上的太陽能帆板、衛星天線等重要機械結構的運動仿真以及航天器交會對接的測試實驗均采用全物理仿真進行模擬。在光學艙單軸氣浮臺試驗中,需要準確模擬光學艙各個軸的姿態動力學特性,主要包括對航天器慣量的模擬、撓性(剛度)模態特性的模擬。由于單軸氣浮臺自身的轉動慣量小于光學艙轉動慣量,因此需要添加慣量模擬器實現對光學艙主要慣量的模擬。多模態撓性模擬器是對服務艙各撓性部件撓性模態特性的模擬。本研究給出模擬器的總體結構設計,工作原理,并重點研究了撓性模擬器工作時的阻尼對撓性模擬器的影響,解決了摩擦力引起的阻尼對撓性模擬器振動影響的難題,通過彈簧軸調整撓性模擬器的不同頻率,達到同一實驗時同時模擬多種撓性附件的各種模態。
1 模擬器總體結構原理
1.1 總體結構
單軸氣浮臺承載重量固定,而模擬器本身需要具有慣量大、結構剛度高且撓性模擬器慣量和剛度大范圍調節的特點,因此設備整體全部采用桁架結構。
多模態撓性與慣量模擬器由撓性模擬器、慣量模擬器、模擬器承載塔、單軸氣浮臺等部分組成,見圖1。承載塔為慣量模擬器和撓性模擬器的安裝及承載裝置,安裝在單軸氣浮臺上。撓性模擬器固連于承載塔上,通過系統內向心深溝球軸承實現繞軸心轉動,氣浮支撐用于卸載撓性模擬器重力。模擬器內部頻率調節裝置可對其頻率進行連續調節。慣量模擬器安裝于承載塔下方兩側,撓性模擬器安裝于承載塔上方,分為2 層,可以在兩端加減配重調節慣量。

圖1 多模態撓性與慣量模擬器
1.2 工作原理
1.2.1 慣量調節原理
在慣量模擬器和撓性模擬器的末端通過加減配重,可以實現轉動慣量調節。

式中,J 為結構總慣量,J初始為結構初始的繞軸心轉動慣量,m配置為配重塊質量,l 為配重塊質心距單軸氣浮臺轉動中心的距離。
1.2.2 撓性調節原理
為實現撓性模擬器不同頻率的需求,需要對撓性模擬器的撓性(剛度)進行調節。由于撓性模擬器頻率低,但自身重量大,其支撐臂的剛度強度需要較高,不能進行調整。因此設計有專門的頻率調節裝置,見圖2。彈簧軸一端與中心軸固定,另一端與撓性架固定。與撓性架固定端可在撓性架上設定位置固定,從而調整彈簧軸有效工作距離。可實現撓性模擬器的振動頻率調整。

圖2 撓性模擬器調節原理
2 模擬器設計
2.1 慣量模擬器
采用桁架式結構,安裝于模擬器承載塔兩側,在末端通過加載質量塊達到慣量要求。
2.2 撓性模擬器
撓性模擬器主要用于模擬服務艙上各種撓性附件,通過慣量調整及頻率調節實現多種模態的模擬。撓性模擬器主要由撓性模擬器、軸系、氣浮支撐、頻率調節裝置組成。撓性模擬器具有慣量大、頻率可調且調節范圍大等特點,實驗時能夠產生振動用于模擬撓性附件,因此必須克服摩擦阻尼對振動產生的影響。其摩擦阻尼產生主要來源于保持繞軸心轉動的深購球軸承和承載重力的止推軸承。撓性模擬器通過螺栓連接箍抱在軸系上,重力作用在氣浮支撐上,通過兩端加載實現慣量調節。軸系上下兩端與承載塔固連,軸系兩側加工有螺紋孔用于彈簧軸固定;氣浮支撐通過球頭螺栓與承載塔連接,氣浮墊浮起承載板,卸載撓性模擬器承載荷。頻率調節裝置的彈簧軸一端與軸系連接,另一端與撓性模擬器承連接,通過固定彈簧軸在撓性模擬器上不同位置,調節撓性模擬器的振動頻率。撓性模擬器工作時氣浮墊通入高壓氣體浮起承載板卸載撓性模擬器重力,調整球頭螺栓高度使承載板與單軸氣浮臺工作面平行,通過軸承墊塊使撓性模擬器與軸系連接,確保撓性模擬器繞轉軸中心擺動轉軸中心擺動。
2.2.1 軸系
軸系由空心軸、連接法蘭、深溝球向心陶瓷軸承、軸承墊塊、彈簧軸墊等組成。撓性模擬器工作時采用對稱結構形式,其作用在軸上的徑向力非常小,因此采用陶瓷軸承保證其繞軸心擺動,陶瓷軸承與氣浮軸承相比容易制造和調試,與鋼珠軸承相比,具有剛度大、質量輕、摩擦小的優點。陶瓷軸承相對于鋼制軸承摩擦系數要小30%左右,陶瓷軸承在無潤滑時其摩擦因數比較高,為了減少陶瓷軸摩擦,使其對撓性模擬器產生的阻尼最小,對比了水基潤滑、醇潤滑、油基潤滑等多種潤滑方式,最終選擇油基潤滑作為潤滑劑,其優點是對軸承本身的摩擦及磨損較小[3]。
2.2.2 撓性模擬器氣浮支撐
氣浮支撐由氣浮墊、承載板、承載圈、球頭螺栓組成,主要功能是卸載撓性模擬器重力,其阻尼的大小直接影響撓性模擬器的振動。振動系統要求的阻尼比范圍為0.4%~0.7%。由于該阻尼比的值比較小,因此,需要校核是否滿足最小阻尼比的要求。一個振動周期內,摩擦帶來的能量損耗為

式中,下標1 表示第一個振動周期,下標2 表示后續一個振動周期。因此阻尼比為
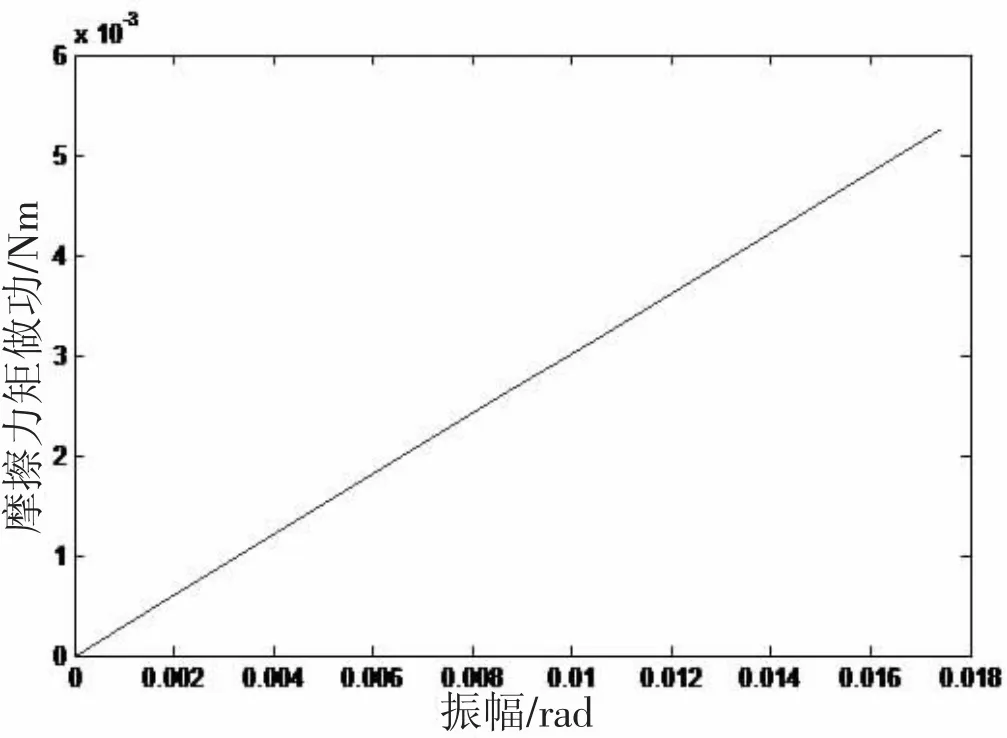
圖3 振幅- 能量損耗
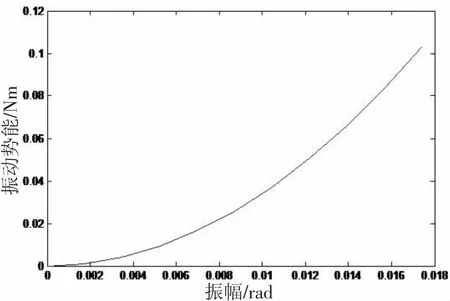
圖4 不同振幅下的振動勢能

振幅>0.6(約0.01 弧度)度時,能滿足阻尼比<0.7%的要求。氣浮軸承的兩曲線的動阻尼系數均隨著氣膜間隙的增大而呈非線性減小,特別是氣膜間隙在 時,氣浮軸承阻尼系數減小的更加明顯[4],故選擇氣浮墊代替定制氣浮止推軸承,大大降低了實驗成本。采用三個氣浮墊的配置便于調整承載板水平,確保每個氣浮墊承載均勻。氣浮墊承載力計算

式中,P 為工作壓強,S 為有效工作面積。
2.2.3 頻率調節裝置
頻率調節裝置由彈簧軸、擺動固定架、彈簧軸夾緊壓板等組成。彈簧軸一端固連于軸系,彈簧軸夾緊壓板可以在擺動固定架任意位置對彈簧軸進行固定。頻率調整的基本原理是利用彈簧軸的彎曲彈性作為結構振動的回復力,通過連續調整桿長對頻率在技術指標要求值附近進行調整,從而實現精確的振動頻率要求。參照懸臂梁頻率計算法

式中:t 為厚度,l 為長度,ρ 為密度,E 為楊氏模量。
彈簧軸采用雙軸對稱安裝模式和單軸獨立安裝模式兩種,實現在撓性模擬器要求慣量范圍內,頻率大范圍調整。
3 測試結果
3.1 慣性模擬器
對于初始轉動慣量J始,可通過測量得到其真實質量,采用實際質量對設計慣量進行修正,修正公式如下

四組慣量模擬器的測量結果見表1。
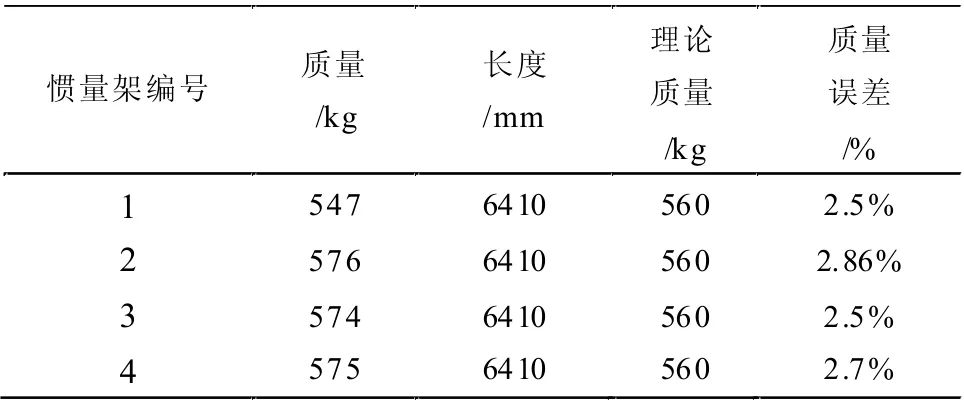
表1 單個慣量架的測試結果
3.2 撓性模擬器
與3.1 節慣量模擬器類似,慣量結果見表2。

表2 單個撓性模擬器測試結果
對于頻率來說,由于測試數據眾多,此處僅列出彈簧軸1,2,3 軸的轉動慣量為10000 kg·m2的測試數據,見表3。

表3 撓性模擬器頻率測試結果
誤差由下式定義

其中,e 為誤差,la為實際范圍,ld為設計范圍。代入數據,誤差為9.1%。
4 結論
本研究對所研制的多模態撓性與慣量模擬器進行詳細介紹,結論為:
(1)通過結構設計實現對光學艙及服務艙撓性附件慣量和模態的精確模擬。
(2)使用常用氣浮墊代替定制專用氣浮軸承降低了實驗成本。
(3)使用彈簧軸進行大范圍頻率調節,可同時模擬光學艙多種撓性附件的模態。目前,多模態撓性與慣量模擬器已經投入航天地面控制試驗使用,使用效果良好。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
