基于STC89C52單片機的智能小車設(shè)計
2022-09-06 07:45:14李亞振
科技創(chuàng)新導(dǎo)報 2022年12期
李亞振
(安陽師范學(xué)院 河南安陽 455000)
當(dāng)前,社會新工藝、新技術(shù)快速發(fā)展,人工智能技術(shù)逐步成熟,并廣泛應(yīng)用于工業(yè)、農(nóng)業(yè)、醫(yī)療等行業(yè)。智能小車作為人工智能領(lǐng)域研究的重要分支,可以代替人類在一些危險環(huán)境下完成相關(guān)工作。本設(shè)計以STC89C52單片機作為小車控制系統(tǒng)的核心處理器,包括驅(qū)動、紅外循跡、避障和音樂播放等模塊,通過對各模塊的設(shè)計,全面說明該智能小車工作的基本原理。
1 系統(tǒng)總體設(shè)計目標
本設(shè)計增添紅外線遙控電路,控制智能小車運動,功能除了前進后退,還可以按照設(shè)置路線行駛并躲避障礙物,利用C語言程序設(shè)置智能小車的運動狀態(tài),在編寫代碼時寫入不同的音樂模塊,調(diào)試實現(xiàn)小車的多功能運行[1]。系統(tǒng)設(shè)計框圖如圖1所示。

圖1 系統(tǒng)設(shè)計框圖
2 系統(tǒng)模塊設(shè)計
2.1 電源輸入模塊
本設(shè)計選用7.4V 可充電鋰電池,可以循環(huán)使用,經(jīng)過LM7805穩(wěn)壓芯片后,給單片機和外圍器件提供供電。電機驅(qū)動的芯片由7.4V 鋰電池直接提供。二極管D1起著防反接的作用,LED2作為電源指示燈,當(dāng)開關(guān)SW1打開時,系統(tǒng)就會開始供電。電源輸入原理圖如圖2所示。
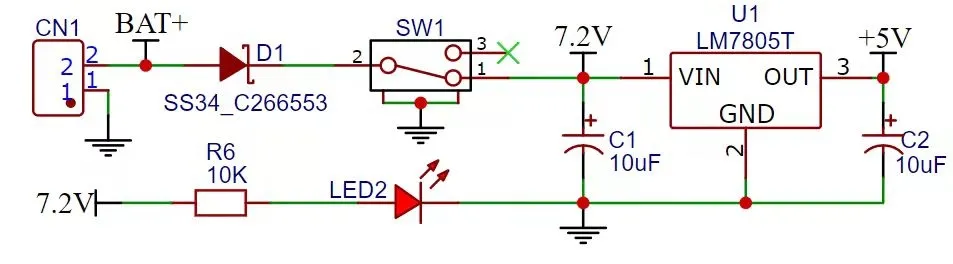
圖2 電源輸入原理圖
2.2 控制模塊
單片機最小系統(tǒng)由STC89C52 芯片、晶振電路、復(fù)位電路、程序下載電路及上拉電阻組成。具體原理如圖3所示,程序下載電路用來下載經(jīng)過keil軟件編譯好的程序文件。本設(shè)計的控制模塊核心是STC89C52 芯片,該芯片具有高速、低功耗、超強抗干擾、價格便宜的優(yōu)點,而且指令代碼完全兼容傳統(tǒng)8051 單片機,這也是選擇它的重要原因[2]。

圖3 控制模塊原理圖
2.3 電機驅(qū)動模塊
電機驅(qū)動的作用是讓小車跑起來、跑得穩(wěn)。單片機直接輸出的電流較小,智能小車跑不起來,因此,需要電機專用驅(qū)動芯片。RZ7899芯片外圍電路簡單,適用于多種電路。芯片由邏輯輸入端口BI 和FI 控制小車前進、后退及制動,與PWM 的輸出可以控制電機轉(zhuǎn)速[3]。當(dāng)兩個電機轉(zhuǎn)速相同時,可以實現(xiàn)前進與后退,當(dāng)兩個電機的轉(zhuǎn)速不同時,可以實現(xiàn)轉(zhuǎn)彎。這個電路的優(yōu)點是抗干擾能力強、待機電流小、輸出內(nèi)阻低等。本次設(shè)計的電機采用的是N20 直流減速電機,它有著壽命長、轉(zhuǎn)速精確等特點,也是市面上比較受大眾用戶支持與喜愛的一個系列。驅(qū)動模塊原理如圖4所示。

圖4 驅(qū)動模塊原理圖
2.4 紅外循跡模塊
智能小車的循跡是在地板上貼上黑色的膠帶,智能小車沿著黑膠帶跑起來。利用紅外線光在不同顏色的反射下得到的結(jié)果不同進行識別,紅外線一直對外發(fā)射,遇到白色會被折回,接收器接收到信號,經(jīng)過比較器輸出高電平反饋給單片機,遇到黑色會被吸收,無法接收信號,比較器電路則輸出為低電平。循跡電路采用了393電壓比較器與ITR9909紅外對管進行設(shè)計,ITR9909 紅外傳感器內(nèi)部含有紅外發(fā)射管和接收管,兩個紅外傳感器應(yīng)安裝在智能小車底部,二者之間距離應(yīng)小于黑色膠帶的寬度,從而實現(xiàn)循跡的功能[4]。循跡模塊原理圖如圖5所示。
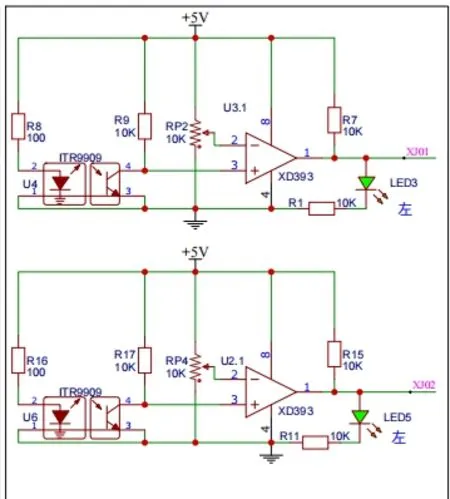
圖5 循跡模塊原理圖
2.5 避障模塊
避障電路采用紅外避障方式,使用IR333C紅外發(fā)射管和PT333-3B 紅外接收管實現(xiàn)此項功能。IR333C紅外發(fā)射管發(fā)出紅外光,PT333-3B紅外接收管接收前方物體反射的紅外光,判斷前方是否有障礙物,小車會做出相應(yīng)的反應(yīng)來躲避障礙物,還可以根據(jù)反射光的強弱判斷前方物體的距離[5]。小車前方左右兩端分別裝了兩套紅外發(fā)射管和接收管,可以實現(xiàn)短距離內(nèi)避障。避障模塊原理如圖6所示。

圖6 避障模塊原理圖
2.6 其他模塊
實現(xiàn)智能小車的基本功能之后,還可以對小車功能進一步豐富。外部控制按鍵用來切換功能和調(diào)試代碼;增加2個LED燈放在智能小車前方的左右兩端,對不同場景模擬不同行駛的功能;增加無源蜂鳴器,可以在行駛過程中鳴笛示意[6],無源蜂鳴器還可以播放音樂。
3 PCB設(shè)計
3.1 邊框外形
智能小車的外形比較特別,需要設(shè)計的PCB 邊框就是小車的底盤。用PCB設(shè)計軟件里面的邊框?qū)舆M行設(shè)計,設(shè)計工程中,可以用繪圖工具中的直線和弧線工具及其網(wǎng)絡(luò)大小和柵格尺寸做輔助。其具體樣式可以根據(jù)自己的喜好進行設(shè)計,本次設(shè)計是一個四驅(qū)車的形狀,如圖7所示。

圖7 PCB圖
3.2 PCB布局
智能小車的元器件比較多,使用菜單欄中工具的布局傳遞功能,可以快速地對元器件進行分類布局。在布局過程中,需要注意每個電路的核心器件和外圍器件放到一起,特殊器件布局時附近的元件會對特殊器件進行干擾,為了操作更方便,輸入輸出的接口應(yīng)該放到板子邊緣處。
4 軟件設(shè)計
在智能小車設(shè)計中,硬件模塊較多,程序控制比較復(fù)雜,程序代碼也較多,為了增強程序可讀性,可以分步調(diào)試。首先,讓智能小車動起來;然后,依次測試智能小車的前進后退和左轉(zhuǎn)右轉(zhuǎn)功能;最后,將程序綜合起來,做成循跡子程序和避障子程序,實現(xiàn)避障和循跡的功能。下面,主要展示智能小車循跡和避障功能的實現(xiàn),如圖8所示。
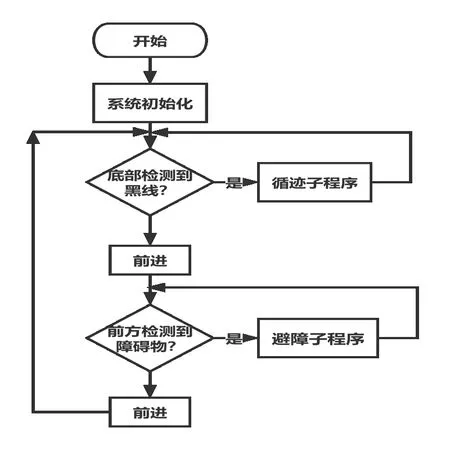
圖8 程序流程圖
當(dāng)智能小車底部的ITR9909紅外傳感器檢測到黑線時,循跡子程序就會被調(diào)用,從而判斷出哪側(cè)的紅外傳感器檢測到了信號。若左側(cè)的紅外傳感器檢測到了信號,智能小車就會向右轉(zhuǎn);若右側(cè)紅外傳感器檢測到了信號,智能小車就會向左轉(zhuǎn);若兩側(cè)均未檢測到信號,小車則繼續(xù)前行。當(dāng)小車前方兩側(cè)IR333C紅外發(fā)射管和PT333-3B 紅外接收管檢測到前方有障礙物存在時,避障子程序就會被調(diào)用,若判斷出左邊有障礙物,智能小車則會向右轉(zhuǎn),反之,則會向左轉(zhuǎn)。
5 焊接調(diào)試
根據(jù)PCB設(shè)計圖,對智能小車進行安裝與焊接,把編譯好的文件下載到STC89C52 芯片中去,最后,進行綜合調(diào)試,觀察是否能夠?qū)崿F(xiàn)設(shè)計的功能。
經(jīng)過多次調(diào)試,小車能夠完成循跡和避障功能,蜂鳴器能夠正常播放聲音,紅外遙控器可以正常控制智能小車,完成了設(shè)計目標(見圖9和圖10)。
圖9 實物調(diào)試圖
6 結(jié)語
本設(shè)計基于STC89C52 芯片,通過系統(tǒng)設(shè)計、軟件設(shè)計、PCB設(shè)計和焊接調(diào)試4個方面,說明了智能小車的基本工作原理,該智能小車通過4個RZ7899驅(qū)動芯片進行驅(qū)動,利用ITR9909 反射式紅外傳感器實現(xiàn)循跡功能,利用IR333C 紅外發(fā)射管和PT333-3B 紅外接收管實現(xiàn)避障功能,并達到了預(yù)期的效果。雖然該智能小車的設(shè)計結(jié)構(gòu)比較簡單,但功能齊全,而且成本較低,具有廣泛的實用價值和應(yīng)用前景。因此,本設(shè)計思路和原理適合應(yīng)用于各智能領(lǐng)域當(dāng)中。
圖10 實物圖
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16