基于無人機的重載鐵路線橋隧巡檢作業體系研究
2022-09-05 09:05:24潘振馬戰國段培勇袁磊李堯杜翠
鐵道建筑 2022年8期
潘振 馬戰國 段培勇 袁磊 李堯 杜翠
1.中國鐵道科學研究院集團有限公司鐵道建筑研究所,北京 100081;2.中國鐵道科學研究院集團有限公司高速鐵路軌道技術國家重點實驗室,北京 100081
朔黃鐵路是我國西煤東運的第二大通道,是國家能源集團礦石、鐵路、港口、電力、航運、石油一體化工程的重要組成部分。朔黃鐵路沿線穿越太行山、恒山、云中山等山脈,地形地貌復雜,山高谷深,橋梁、隧道和高填路堤眾多。隨著貨車軸重提高、長大編組重載列車開行,線橋隧設備劣化速率加快,病害增多,對線橋隧的檢測和維護提出了更高要求。而無人機技術的商用推廣為鐵路線橋隧巡檢提供了新途徑。日本、法國、美國、英國、澳大利亞、荷蘭等國家利用無人機對鋼軌、橋梁服役狀態進行檢查,取得了較好效果。中國鐵路成都局、南昌局、北京局、武漢局利用無人機開展橋梁、路基、沿線地質災害、周邊環境巡檢[1-3],有效減輕了線路巡檢人員工作強度,降低了人員和設備風險。本文結合朔黃鐵路現狀及相關標準,分析無人機巡檢需求,從無人機平臺和載荷、巡檢作業模式、巡檢系統和標準體系四個方面,提出朔黃鐵路無人機線橋隧巡檢作業體系。
1 無人機巡檢需求分析
朔黃鐵路沿線存在氣象災害誘發滑坡、崩塌等次生地質災害的安全隱患,而且這些區域檢查人員難以到達,檢查工作效率低、效果差,勞動安全隱患大。近年來朔黃鐵路運量、行車密度增大,線橋隧的傷損、劣化加快。目前利用綜合檢測車、探傷車等基本實現了軌道結構的檢測。因此,重點利用無人機對橋梁、隧道、路基邊坡開展巡檢作業。
朔黃鐵路橋梁主要為混凝土橋梁,病害主要表現為裂縫、破損、蜂窩麻面等。根據TG/GW 103—2018《普速鐵路橋隧建筑物修理規則》,混凝土梁裂縫寬度達到0.2 mm時其劣化等級為B級,需維修整治,因此混凝土鐵路橋梁無人機巡檢的檢測精度至少滿足識別0.2 mm寬裂縫的要求。
朔黃鐵路隧道洞口、路基存在崩塌落石、邊坡溜坍、排水設施淤塞等風險,邊坡存在沖刷、開裂、片石脫落等病害,可能會直接影響行車安全,在無人機巡檢過程中需重點關注。
2 無人機平臺及載荷
2.1 無人機平臺
各固定翼無人機比較難操作,起飛時對場地要求比較苛刻,危險系數比較高,但是它的續航時間比較長,適合大面積作業。多旋翼無人機操作流程簡單,無需特定場地起飛,可垂直起降,相對安全,但是它的飛行時間比較短,效率較低。垂直起降固定翼無人機結合了固定翼與多旋翼工作方式,可在狹小范圍內起降,不需要跑道或彈射裝置;能長距離、長航時作業;既可懸停作業又可高航速作業,更加適應復雜的作業環境,但是體積比較大,運輸不方便。綜合各類無人機特點,建議采用多旋翼無人機。鐵路橋梁、隧道洞口的巡檢面積較小,路基邊坡檢測距離可能較長,可分階段進行檢測。檢測時攜帶備用電池,可以彌補多旋翼無人機飛行時間比較短的缺點,滿足線橋隧巡檢作業要求。
國內外無人機品牌中,知名度及技術水平較高的有大疆、飛馬、中科遙感、零度智控、極飛科技、億航、昊翔、星圖、派諾特、因諾航空等。
大疆行業級產品中,飛行平臺主要有御2與經緯M300RTK。御2起飛重量(無配件)僅909 g,續航時長僅31 min。經緯M300RTK擁有55 min長續航、負載大、六向定位避障等優勢。綜合考慮鐵路線橋隧的任務要求,擬選用大疆M300RTK無人機。
2.2 無人機載荷
無人機載荷主要有傾斜攝影、激光雷達、熱紅外相機、多光譜相機、高光譜相機、空中氣體檢測儀、空中探照燈等。無人機航測主要采用的載荷是攝影相機、機載激光雷達和紅外攝像機。
針對線橋隧巡檢特點,配合多旋翼M300RTK無人機平臺,選擇大疆L1激光雷達和大疆P1、H20等相機采集數據。
1)大疆L1激光雷達:集成Livox激光雷達、高精度慣導、測繪相機和三軸云臺,可搭配經緯M300 RTK和大疆智圖,實現全天候、高效率實時三維數據獲取以及復雜場景下高精度后處理三維模型的構建。
2)大疆P1相機:集成全畫幅圖像傳感器與三軸云臺,支持多款定焦鏡頭,高性能、多用途。
3)大疆H20相機:集成2 000萬像素變焦相機、1 200萬像素廣角相機和1 200 m激光測距儀。
3 無人機巡檢作業模式
3.1 巡檢作業要求
作業前要對航測涉及區域進行風險評估。關注的目標包括機場、軍事設施、重要建筑物、高大建筑物、高壓電塔、植被,還需看是否滿足飛行條件。必要時進行空域申請,將設置的作業航線與允許飛行的空域進行對比,確保飛行條件的可操作性。
根據鐵路工務運維不同應用場景、鐵路線路走向和巡檢作業的相關要素,設計并確定無人機平臺的飛行軌跡、飛行高度、載荷觸發動作等,包括起飛點和降落點的設定、航線規劃、校準點布設等。
3.2 橋梁巡檢作業模式
重載鐵路橋梁以T梁為主,對一孔32 m簡支T梁的單側面進行貼近攝影測量,該梁梁高2.5 m,縱向每4 m設置1道橫隔板。采用正攝+俯仰交向攝影,最多采集像片80張,現場作業時長16.9 min。結果見圖1。

圖1 32 m T梁單側面巡檢結果
3.3 路基邊坡巡檢作業模式
采用豎直攝影方式采集路基邊坡坡面圖像,將主光軸oO近似垂直于坡面,相機鏡頭傾角θ等于坡面傾角β,如圖2(a)所示。采用此方式采集的坡面圖像,不容易出現變形,能夠直觀表現坡面特征。對于臺階式邊坡,存在每級坡β不同的問題。此時,θ需要根據β的改變作出調整,始終保持θ≈β。
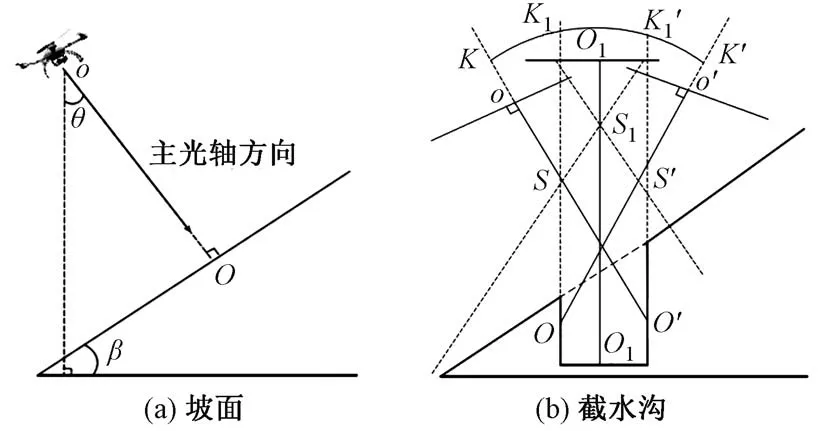
圖2 路基邊坡拍攝方式示意
路基截水溝呈凹形,如果無人機在拍攝時采用與邊坡截水溝同樣的角度,部分區域會位于相機采集盲區。邊坡的截水溝是根據每個邊坡的地質條件、所處的環境等設計的,大小規格不一樣。因此,采用主光軸垂直于溝底的方式采集圖像,主光軸在K1K'1范圍內[圖2(b)],操作簡單,可避免出現采集盲區。
3.4 隧道洞口巡檢作業模式
根據隧道洞口仰坡環境和特點,將隧道洞口巡檢分為區域整體巡檢、重點區域巡檢和高危病害定制巡檢三部分并規劃不同的航線。
區域整體巡檢的目的是采集隧道洞口及仰坡全測區傾斜攝影數據和點云數據,建立三維模型。
重點區域巡檢是在取得區域整體巡檢數據后,對其查看、分析,找出值得關注的重點區域(發現問題點或病害點所在區域),再根據重點區域來制定巡檢航線。重點區域巡檢需要貼近懸停至病害區域,調整至最好觀測角度,以采集病害區域更加清晰的圖像數據。
高危病害定制巡檢是針對重點區域巡查中發現的對線路運營具有較大危害性或處于進展中的病害,如穩定性較差的危巖或新生擴展裂縫等,進行近距離高頻次觀測。
4 無人機巡檢系統
無人機巡檢系統包括無人機作業管控、數據存儲及智能識別、數據統計分析和綜合展示三部分。
4.1 無人機作業管控
①空域申請。根據《中華人民共和國飛行基本規則》等相關規定,與相關管理部門協調建立統一空域申請渠道和定期協商機制,便于集中管理飛行計劃。②飛行計劃。系統中嵌入空域申請和狀態管理功能,建立巡檢工單,負責對飛行計劃進行審批和管理。③巡檢任務管理。對巡檢任務進行申報、審批、派發和報備,并跟蹤、監視任務的執行進度。④自主航線規劃。根據地圖和地形信息數據、天氣數據、任務內容對巡檢任務進行分析,規劃出最優飛行航線。
4.2 無人機巡檢數據存儲及智能識別
利用無人機完成巡檢數據采集后,通過內網上傳到海量存儲陣列,作為原始數據進行存儲。在GPU服務器上部署智能識別程序,通過網絡方式共享訪問海量存儲陣列中的圖像數據,進行病害的智能識別。識別結果也存儲在海量存儲陣列,見圖3。
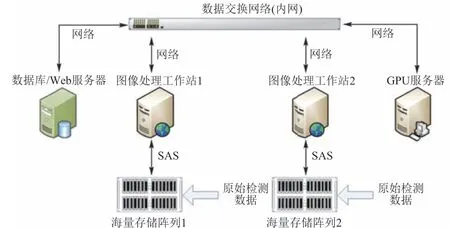
圖3 無人機巡檢數據存儲及智能識別
病害自動識別算法流程見圖4。首先建立樣本庫,使用標注工具對圖像進行像素級語義分割標注,建立病害樣本數據集,按一定比例分為訓練集和驗證集;然后構建基于編碼(ResNet18網絡)-解碼(PPM網絡)架構的深度神經網絡傷損分割模型[4],將訓練集中的圖片輸入到分割模型的編碼網絡中提取特征信息,輸入到解碼網絡中生成對象分割結果,持續進行模型訓練;最后通過驗證集對模型識別能力進行評估,找到最優的模型參數,實現對病害的自動化檢測、病害趨勢分析和狀態評定。
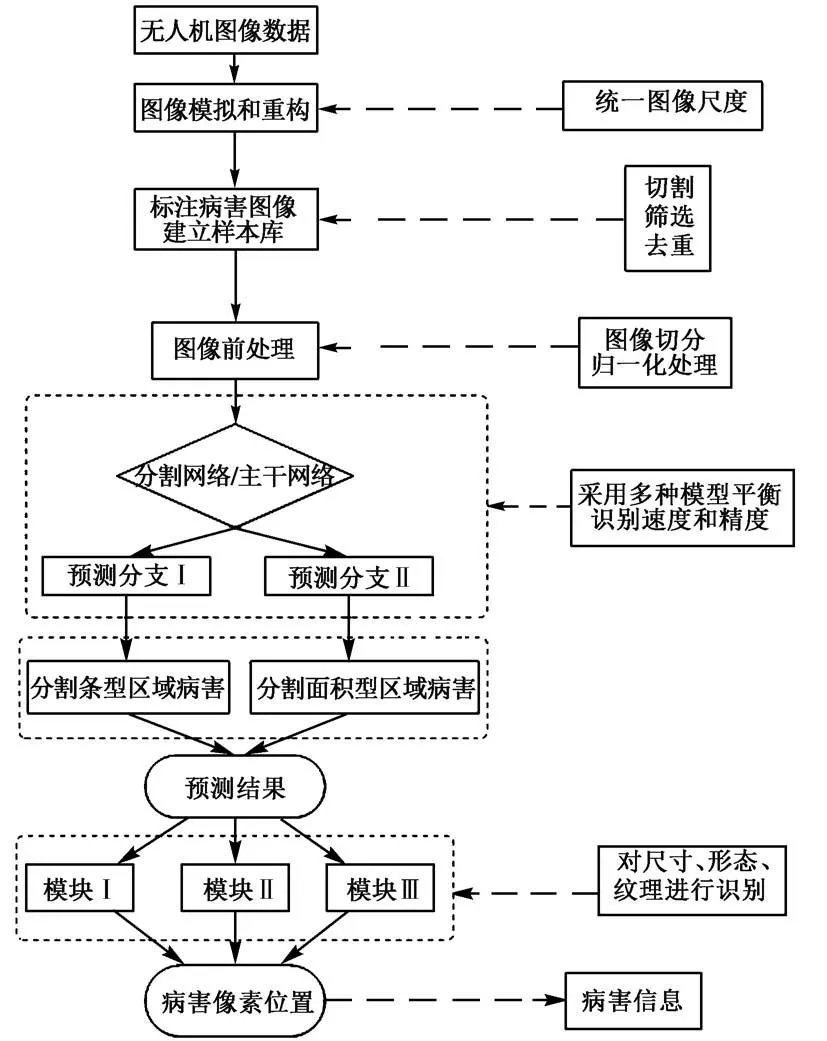
圖4 病害智能識別算法流程
4.3 巡檢數據統計分析與綜合展示
Web服務器通過網絡方式共享訪問海量存儲陣列中的圖像數據和病害識別結果,對巡檢數據進行統計分析,結合三維GIS(Geographic Information System)將巡檢結果進行綜合展示。
巡檢數據的統計分析主要內容是:
1)統計病害空間分布。基于工務設備病害分級分類標準,無人機巡檢系統將線橋隧無人機巡檢發現的結構病害在空間維度上進行展示,便于工務管理部門掌握該設備健康狀況,并制定相應的維修方案。
2)病害發展趨勢分析。無人機巡檢系統對檢測到的同一病害在時間維度上進行展示,揭示此處病害在過去某個時間范圍內的發展、演變趨勢,為設備劣化預測提供數據支持。
3)生成巡檢報告。無人機巡檢系統自動生成月報、季報、年報等周期性巡檢報告。根據需要,工務部門可以選擇重點關注的工務設備結構病害的演變過程進行分析、研判,并自動生成結構病害的巡檢報告。
無人機巡檢結果綜合展示是將巡檢結果以表格、圖片等方式對結果進行展示,并結合GIS和BIM(Building Information Modeling)展示病害位置。基于三維GIS平臺,集成BIM、影像、地形、傾斜攝影、激光點云等,實現BIM數據與多源數據的融合,對病害所在位置進行顯示,并可以點擊查詢病害類型、大小、歷史發展等詳細信息,實現宏觀、全面的展示與管理。
5 標準體系
參考無人機巡檢智能管理系統,考慮鐵路無人機巡檢管理、技術需求,建議分類編制標準。
1)管理類標準:①鐵路無人機巡檢空域申請與巡檢計劃管理。規定無人機空域申請、巡檢航線規劃的流程、要求等內容。②鐵路無人機巡檢作業安全工作規程。規定無人機巡檢安全工作的一般要求、保證安全的組織和技術措施、安全注意事項、巡檢作業異常處理等內容。③鐵路行業無人機巡檢作業人員培訓考核規范。規定無人機巡檢作業人員培訓應達到的能力。④鐵路無人機巡檢應急處置制度。規定應急處置的響應機制、組織機構、應急處置工作流程等。
2)技術類標準:①鐵路無人機巡檢分類和配置原則。根據無人機巡檢應用場景,對不同使用條件下無人機及其載荷的功能、性能指標進行細化,規范無人機適配性,建立不同場景下的配置原則。②鐵路無人機巡檢作業技術條件。規定采用無人機對鐵路巡檢的作業要求、準備工作、方式及方法、模式及內容、資料的整理及移交、異常情況處置等。③鐵路無人機巡檢數據處理、移交與驗收規范。規定采用無人機對鐵路巡檢時數據自動采集和處理的要求,包括圖片、點云數據的采集方式、數據處理及其質量要求等。
6 結論
1)在對比分析國內外無人機類型及特點的基礎上,建議采用大疆M300RTK無人機,并根據需要搭載P1、H20相機和L1激光雷達。
2)根據橋梁、路基邊坡、隧道洞口的巡檢要求,提出了線橋隧巡檢作業模式。
3)從無人機作業管控、數據存儲及智能識別、統計分析和綜合展示三個方面開發了無人機巡檢系統。
4)建議編制鐵路無人機巡檢空域申請與巡檢計劃管理,鐵路無人機巡檢數據處理、移交與驗收規范等管理類和技術類標準。
猜你喜歡
天天愛科學·科學啟蒙(2025年3期)2025-03-27 00:00:00
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
云南畫報(2021年12期)2021-03-08 00:50:54
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
鐵道通信信號(2018年7期)2018-08-29 01:17:04
故事大王(2016年7期)2016-09-22 17:30:08
通信電源技術(2016年4期)2016-04-04 02:58:04
工程建設與設計(2016年3期)2016-02-27 10:50:46
中國火炬(2015年7期)2015-07-31 17:40:05
