Ka頻段合成孔徑雷達高度計機載數據處理
2022-09-03 02:19:38劉曉楠孫晗偉魯耀兵
系統工程與電子技術 2022年9期
關鍵詞:模型
劉曉楠, 王 昆, 孫晗偉, 魯耀兵
(北京無線電測量研究所, 北京 100854)
0 引 言
海洋覆蓋了地球表面積的70%以上,對人類和自然界有巨大影響。然而與陸地相比,人類對海洋的認知遠遠不夠。在空間科學發展以前,人類只能通過艦船對海洋進行局部觀測;隨著衛星遙感技術的快速發展,人類對海洋的探索進入了新紀元。
雷達高度計是一種重要的微波遙感器,它可以對海洋進行全球尺度的連續監測。通過對海面回波進行重跟蹤,雷達高度計可以測量海表面高度、有效波高、后向散射系數等關鍵參數。這些數據可應用于地球物理學、海洋動力學、大氣環境學、海冰檢測等方面,對軍事領域的重力場反演和民用領域的災難預警具有深遠意義。
傳統雷達高度計工作于實孔徑模式,其主要缺點有:脈沖有限足跡直徑大,公里級的分辨率難以滿足現階段的海洋觀測需求;發射功率浪費大,大部分功率都在脈沖有限足跡之外;回波信噪比低,測距精度難以提高。
目前,合成孔徑雷達(synthetic aperture radar, SAR)高度計已經成為新一代雷達高度計,其顯著優勢有:通過引入合成孔徑技術,使沿軌向分辨率大大提高,分辨率由公里級提升至百米級;通過延遲補償技術,利用了天線波束內的全部能量,降低了發射信號的峰值功率;通過多視處理,提高了有效觀測次數,使測距精度大幅提高。
Cryosat-2衛星于2010年發射,其高度計載荷首次試驗了合成孔徑工作模式。Sentinel-3A衛星于2016年發射,其高度計載荷首次在全球尺度上業務化運行合成孔徑模式。2020年11月21日,Jason-CS/Sentinel-6任務發射了第一顆衛星S6 Michael Freilich(S6-MF),其主載荷Poseidon-4也是一顆SAR高度計。
相比于Ku頻段,Ka頻段具有更高的信噪比和分辨率,且不需要使用Ku和C雙頻段來進行電離層校正,因此越來越多的高度計開始工作于Ka頻段。比如2013年發射的SARAL/AltiKa衛星,其主載荷是一顆Ka頻段高度計,其測量性能已被證實優于傳統Ku頻段高度計;以及計劃于2022年發射的SWOT衛星,其主載荷也是一顆Ka頻段高度計。
綜上,Ka頻段SAR高度計是未來高度計衛星發展的方向之一,十分有必要對其進行研究。但是,選擇Ka頻段也會帶來令人擔憂的問題,比如,由于頻段升高而帶來的雨衰,是否大幅影響數據的有效率,由于波束變窄使得回波受波浪影響更大,導致回波形狀發生變化,在此情況下模型的適應性和重跟蹤的成功率又將如何等。
因此,面對這些未知問題,進行前期機載試驗尤為重要。本文所基于的機載試驗,是國內首次Ka頻段SAR高度計海面機載試驗。本文利用試驗數據,基于一種改進的回波模型,成功實現了海面高度反演,并且通過模型數據對反演參數進行了定性驗證,結果非常吻合。但是,由于高海況下飛機不具備起飛條件,因此很難獲取相應數據。所以機載試驗只能驗證中低海況,有其局限性。
1 SAR高度計回波預處理
1.1 高度計原理概述
雷達高度計主要用來測量目標相對于橢球參考面的高度。如圖1所示,對于被觀測目標,當高度計在其正上方點時,已知衛星相對于橢球參考面的軌道高度為,測量得到高度計與海面之間的距離為,則目標相對于橢球參考面的高度為
Δ=-
(1)
SAR高度計不僅在被觀測目標的正上方位置點進行觀測,還在軌道上的多個位置如、點對目標進行觀測。通過多次測量進行多視處理,提高測量精度。根據定義,在偏離被測目標正上方時測得的距離不能直接作為測量結果,所以在多視處理前需要進行延遲距離校正。
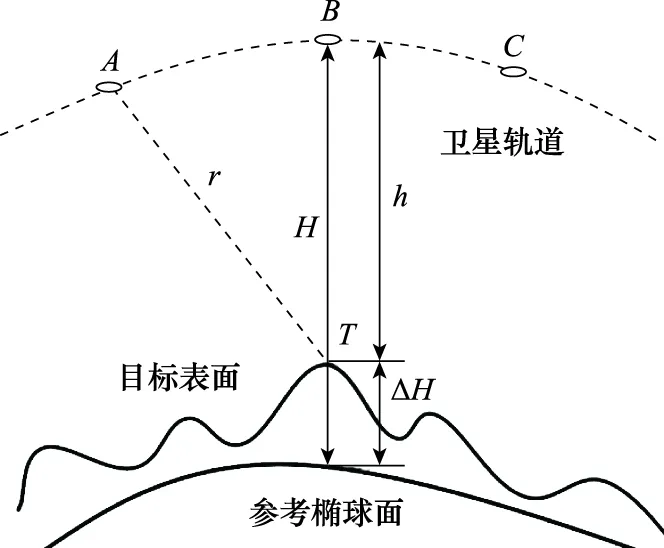
圖1 高度計測高原理圖Fig.1 Schematic of height measurement of altimeter
雷達高度計向星下點發射脈沖,圖2是高度計足跡的俯視圖。隨著時間推移,脈沖照明區由逐漸增大的圓形變為內環逐漸擴大的圓環,直至天線波束邊緣。其中,沿軌向為衛星飛行方向,交軌向為觀測表面垂直于沿軌向的方向。

圖2 高度計足跡示意圖Fig.2 Diagram of altimeter footprint
傳統高度計采用實孔徑,其脈沖有限足印定義為面積最大的圓形照明區,如圖2中綠色圓形所示。足印半徑與脈沖有限寬度有關:
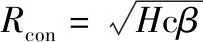
(2)
式中:是軌道高度;c是光速;=1,是發射信號帶寬。
在SAR高度計中,雷達首先以較高的脈沖重復頻率(pulse repetition frequency, PRF)發射一簇相干脈沖,然后等待接收脈沖。接收完這一簇脈沖后,再發射下一簇脈沖。
SAR高度計在接收到脈沖簇回波后,首先進行去斜處理,以實現脈沖壓縮。然后,利用簇內脈沖的相干性,進行合成孔徑處理。通過多普勒波束銳化,在沿軌向形成多個多普勒條帶,如圖2中粉色區域所示。經過延遲距離校正,將不同子視回波前沿對齊。最后進行多視處理,獲取用于回波重跟蹤和參數反演的回波。
綜上,SAR高度計數據處理的關鍵技術主要包括:多普勒波束銳化、延遲距離校正、子視回波配準、多視處理、回波建模、回波重跟蹤。其中,回波建模和重跟蹤方法將在第2節進行介紹,將前面4項稱為回波預處理。
1.2 多普勒波束銳化
在脈沖簇模式下,完整的合成孔徑過程被劃分為多個子孔徑合成過程,每一個脈沖簇對應一個子孔徑;相應地,數據處理也以脈沖簇為單位進行。
通過子孔徑內的合成處理,雷達等效波束變窄了。稱等效后的窄波束為子波束,每個子波束覆蓋一個多普勒條帶,如圖2中粉色區域所示,條帶的寬度決定了沿軌向分辨率。
設子波束寬度為,則

(3)
式中:是波長;是衛星速度;Na是簇內脈沖數。
設雷達高度計正下方子波束對應的多普勒條帶寬度為,則
(4)
對于偏離雷達正下方的子波束對應的條帶,其寬度根據幾何關系略有增加,一般為厘米級,可忽略不計。
傳統高度計的沿軌向分辨率就是其有限足印的直徑,一般為公里級。而SAR高度計的沿軌向分辨率是多普勒條帶的寬度,一般為百米級。因此,SAR高度計能夠大大提高沿軌分辨率。
另外,通過延遲距離校正,SAR高度計可以積累更多的信號能量,如圖2中藍色區域所示;而傳統高度計只能積累脈沖有限足跡內的能量,如圖2中綠色區域所示。因此,SAR高度計的信噪比更高,相應測高精度也得到提高。
每個雷達回波由波束覆蓋范圍內所有條帶產生,由于衛星具有水平速度,所以沿軌向不同條帶產生的回波具有不同的多普勒頻率。形象地來看,高度計的天線波束在沿軌向被銳化成多個子波束,天線的照射區域被銳化成多個條帶,如圖3所示,上述過程就是多普勒波束銳化。
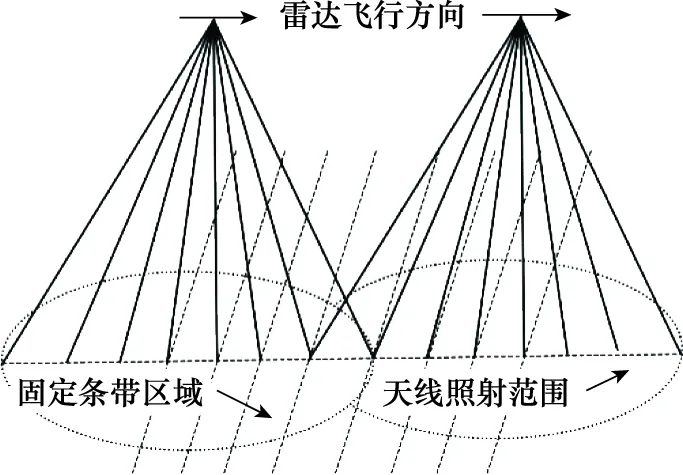
圖3 多普勒波束銳化示意圖Fig.3 Diagram of Doppler beam sharpening
1.3 子視回波配準
設某脈沖簇中間時刻雷達的沿軌向坐標為,發射該脈沖簇時波束覆蓋范圍內某條帶的沿軌向中心坐標為,則該條帶回波的多普勒頻率為

(5)
定義距離向為雷達接收脈沖的方向,方位向對應沿軌向。將距離向脈沖壓縮后的數據進行方位向傅里葉變換,得到距離-多普勒域的二維回波數據,則基于式(5)求得的多普勒頻率可以提取出屬于某一條帶的回波,稱為該條帶的一個子視回波。
如圖3所示,隨著衛星飛行,雷達將在軌道上的多個位置對某一條帶區域使用不同的子波束進行多次觀測,得到多個子視回波。將子視回波與沿軌向條帶進行對應的過程,就是子視回波配準。
在觀測過程中,對某一固定條帶,雷達有一個先靠近再遠離的過程。因此,在距離-多普勒域,屬于同一條帶的不同多普勒頻率的子視回波前沿在方位向的排列是一條拋物線。
1.4 延遲距離校正
多視處理,是將屬于同一條帶的子視回波進行非相干疊加,通過多次測量求取平均值,提高測量精度。然而,由第13節可知,各子視回波前沿在方位向的排列是一條拋物線,不能直接累加。因此,必須先進行延遲校正,將子視回波的前沿對齊。
將一組脈沖簇回波數據變換到距離-多普勒域,不同多普勒頻率的子視回波屬于不同觀測條帶,它們的回波前沿在方位向的排列同樣是一條拋物線。先在脈沖簇內進行距離校正,將子視回波前沿對齊,進而根據條帶位置提取對應的子視回波,即進行子視回波配準。
脈沖簇內的距離校正可以采用在距離頻域進行相位補償的方式(方位向在多普勒域)。對于多普勒頻率為的回波,其校正量近似為
(6)
式中:為地球曲率。
令距離頻率為,則相位補償量為

(7)
對所有脈沖簇進行延遲距離校正和子視回波配準后,屬于某條帶的子視回波前沿已經對齊。將所有子視回波進行非相干疊加,就得到了多視回波。
2 SAR高度計回波重跟蹤
2.1 改進的回波模型
1977年,Brown基于一些假設條件,提出了海面后向散射回波模型的經典表達式:
()=()*()*()
(8)
式中:符號*表示線性卷積;()是接收回波的平均功率函數,可以表示為3項函數的線性卷積:()是平坦海面的脈沖響應函數;()是海面鏡像點的概率密度函數;()是雷達系統的點目標響應函數。
在理想情況下,雷達高度計波束應該指向星下點。但是由于衛星平臺的姿態控制精度有限,實際雷達波束指向可能與星下點方向存在偏差。誤指向角即為實際波束指向與星下點方向的夾角。當存在誤指向角時,天線方向圖就會發生變化,進而影響平坦海面的脈沖響應函數。
在合成孔徑模式下,沿軌向分辨率從公里級提升至百米級,因此回波模型對天線方向圖和誤指向角更加敏感。但是,由于幾何模型本身已經非常復雜,且含有大量卷積運算,因此目前現有的模型大多忽略了對誤指向角的考慮,這將在一定程度上影響參數估計的精度。
文獻[25]提出了一種含有誤指向角的SAR干涉高度計回波模型。本文在此基礎上,通過將該文信號模型中的干涉基線長度設置為0,并結合幾何關系對模型做相應處理,將其轉換為一種可以適用于底視SAR高度計的回波模型。
這種改進的回波模型將誤指向角作為輸入量,可以充分利用星上設備測量的平臺姿態角,提升模型與實際回波的匹配程度,進而提高參數反演的精度。
本文回波模型基于3項卷積模型。其中,海面散射點的概率密度函數表達式如下:

(9)
雷達系統的點目標響應函數表達式如下:
(10)
以上兩項函數的卷積結果為
(11)

(12)
式中:混合波高=SWH/2c,SWH為有效波高;點目標響應的3 dB寬度=1.125/B。
建立回波模型的重難點在于確定平坦海面的脈沖響應函數()。該部分建立的思想為:首先根據多普勒頻率,建立每個多普勒分辨條帶的單視脈沖響應函數,然后結合式(11)進行卷積計算,生成單視回波模型,最后進行多視處理。
在高度計2D足跡平面上,設海面散射點與星下點連線相對于衛星飛行方向的夾角為?,則第個合成子波束的脈沖響應函數表達式為


(13)
式中:

(14)

(15)
=cos ?-
(16)
(17)
式(13)~式(17)涉及的參數和函數有:天線增益;合成波束增益;后向散射系數;階躍函數(·);波數。
(·)為含有誤指向角的天線方向圖,其近似表達式為

(18)
式中:為俯仰角;為橫滾角;和分別為沿軌向和交軌向的波束寬度。俯仰角和橫滾角共同構成誤指向角。需要指出的是,式(18)未考慮偏航角,因為偏航角只影響高度計觀測的地表位置,不影響天線方向圖的能量分布和回波形狀。


(19)
式中:()的定義見式(11)。
若總積累視數為,則多視回波值為

(20)
至此已經建立了完整的回波模型。當其他系統參數確定時,式(8)的回波模型可以抽象為3個參數的表達式:
()=(,SWH,)
(21)

圖4展示了SAR高度計回波模型隨回波前沿、有效波高、回波幅度、誤指向角的變化。

圖4 SAR高度計回波模型Fig.4 SAR altimeter echo model
需要說明的是:對于回波前沿,由于回波的時間分辨單元為納秒級,為便于顯示,在圖4(a)中利用光速將回波前沿的單位轉換為m;另外,由于俯仰角和橫滾角共同構成誤指向角,為了便于說明,在圖4(d)中,仿真時取俯仰角為0°,即誤指向角等于橫滾角。
2.2 最小二乘重跟蹤
回波重跟蹤是采用一定的算法,使第2.1節中的回波模型式(21)與實際回波估計式(20)達到最吻合的狀態,從而得到回波中蘊含的反演參數。
在實際應用中,通過對高度計回波進行重跟蹤,可以得到抽象模型式(21)中的回波前沿、有效波高和回波幅度,即(,SWH,)。
基于回波前沿,可以計算出高度計到觀測表面的距離,進一步反演海面高度,監測氣候變化;基于有效波高SWH,可以推測此時的海況,對于艦船航行有重要意義;基于回波幅度,可以計算后向散射系數,進一步反演海面風速。
本文采用最小二乘算法進行回波重跟蹤,其基本思想是使回波模型與實際回波的誤差平方和最小。在具體實現時,采用迭代的方法獲得最優解。
首先將SAR高度計回波模型式(21)簡寫為3項待估參數的表達式:

(22)


(23)
式中:(Δ,ΔSWH,Δ)是各參數的增量;(,,)是模型對各參數的偏導數:

(24)
令為回波的第個采樣值,回波共有個采樣點,則誤差方程為

(25)

(26)
令對各參數的偏導數為0,矩陣表示為
=
(27)
式中:是回波模型的偏導數矩陣;是殘差矩陣;是待估參數的增量矩陣。
求解式(27),得至矩陣,更新待估參數:

(28)
重復上述步驟,直至回波模型與實際回波足夠接近,即可停止迭代,此時便得到了反演參數。
3 Ka頻段機載數據處理
3.1 機載試驗簡介
2019年,在中國山東青島海域獲取了Ka頻段SAR高度計的機載校飛試驗數據,飛行航線如圖5中的綠色線段所示。

圖5 機載試驗航線Fig.5 Airborne experiment route
在機載試驗中,雷達以5 kHz的PRF均勻收發脈沖,該PRF可以保證脈沖之間具有相干性,因此可以脈沖簇為單位,進行合成孔徑處理。
機載試驗主要參數如表1所示。

表1 機載試驗參數Table 1 Parameters of airborne experiment
3.2 機載回波預處理
在機載試驗中,飛機姿態變化幅度比較劇烈,因此首先需要對回波數據進行運動補償,并做去斜處理,以實現脈沖壓縮。然后以64個回波為一簇,進行延遲距離校正,經過子視配準和多視處理后,獲取合成孔徑模式下的多視回波。
圖6和圖7展示了延遲距離校正前后,距離-多普勒域的脈沖簇回波,可以看到校正后不同子視回波的前沿已經對齊。

圖6 距離校正前的脈沖簇回波Fig.6 Pulse cluster echo burst before range correction
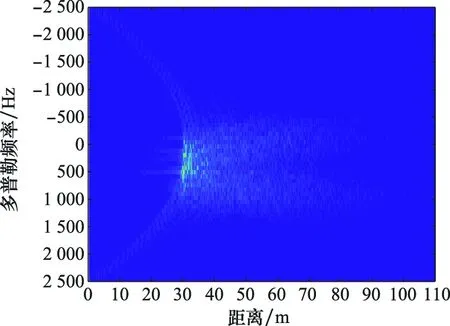
圖7 距離校正后的脈沖簇回波Fig.7 Pulse cluster echo after range correction
圖8中紅色曲線展示了一個典型的歸一化多視回波,即對回波幅度進行歸一化處理,便于后續的回波重跟蹤;藍色曲線展示了一個典型的歸一化脈沖簇回波,可以看到多視處理極大地提升了回波信噪比。

圖8 歸一化多視回波和脈沖簇回波Fig.8 Normalized multi-view echo and pulse cluster echo
需要說明的是:為了更清晰地顯示回波細節,對原始回波進行了截取,因此圖8及以后的圖示中,回波的距離位置與圖6和圖7不同。
圖9展示了機載SAR高度計的448個多視回波序列。

圖9 機載多視回波序列Fig.9 Airborne multi-view echo sequence
3.3 機載回波重跟蹤
根據機載試驗系統參數建立SAR高度計回波模型,對每一條多視回波進行重跟蹤。
在建立模型時,充分利用了由慣導設備測量的飛機姿態角信息,將其作為回波模型的誤指向角輸入,從而使回波模型更接近真實的回波,便于在重跟蹤時快速收斂。
圖10展示了一個歸一化多視回波的重跟蹤過程,其中深藍色曲線為歸一化機載回波,紅色曲線為初始回波模型,黃色曲線、紫色曲線、綠色曲線、淺藍色曲線分別為第1、2、3、14次迭代后的回波模型。可以看到,隨著迭代次數增加,回波模型與機載回波逐漸逼近。

圖10 回波重跟蹤過程Fig.10 Echo re-tracking procedure
圖11展示了對應的重跟蹤結果。由圖11可以看到,當引入誤指向角時,回波估計與實際機載回波吻合得更好,因此參數估計更加準確。
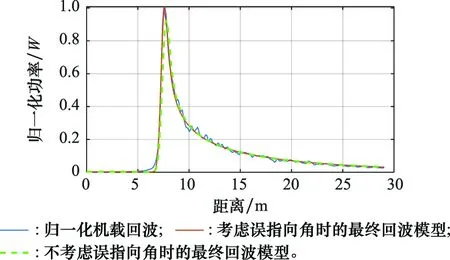
圖11 回波重跟蹤結果Fig.11 Echo re-tracking result
圖12、圖13、圖14分別展示了回波重跟蹤過程中,回波前沿、有效波高、歸一化回波幅度的收斂過程,可以看到3項參數均快速收斂。
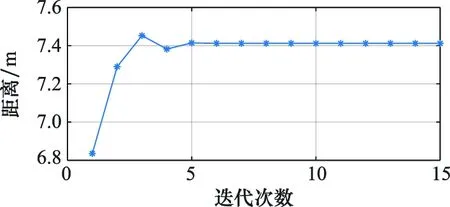
圖12 回波前沿收斂過程Fig.12 Converge procedure of echo front
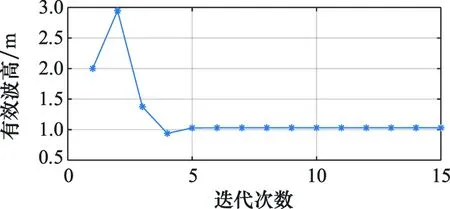
圖13 有效波高收斂過程Fig.13 Converge procedure of SWH

圖14 歸一化回波幅度收斂過程Fig.14 Converge procedure of normalized echo amplitude
圖15是SAR高度計448個多視回波的海表面高度(sea surface height, SSH)反演結果,SSH由回波前沿跟蹤結果結合軌道高度、采樣起始距離、光速c計算得到:
(29)

圖15 SSH反演結果Fig.15 Retrieval result of SSH
3.4 SSH反演結果驗證
利用丹麥科技大學發布的平均海表面(mean sea surface, MSS)高度模型數據對反演得到的SSH數據進行驗證。圖16為機載掛飛區域對應的MSS數據。

圖16 機載掛飛區域對應的MSS數據Fig.16 MSS of airborne flight area
根據掛飛航線的經緯度對MSS數據進行提取,結果如圖17所示。

圖17 機載掛飛航線MSSFig.17 MSS of airborne flight path
MSS數據由多年的高度計測量結果平均得到,它去除了隨時間周期性變化的潮汐的影響;而直接觀測到的SSH是瞬時海表面高度,其中含有潮汐分量。不過,由于潮汐的空間尺度很大,因此在機載飛行的14 km內,可以近似認為潮汐是一個固定值。結合以上兩點可知,機載數據反演的SSH與MSS模型數據之間存在一個相對固定的偏差。
將SSH反演數據與掛飛航線MSS數據進行對比,如圖18所示,兩者去除了相對偏差。可以看到,藍色曲線與紅色曲線更加吻合,兩者的均方根誤差為1.94 cm;而綠色虛線與紅色曲線的均方根誤差為2.21 cm。以上結果驗證了參數反演的正確性和本文回波模型的優勢。
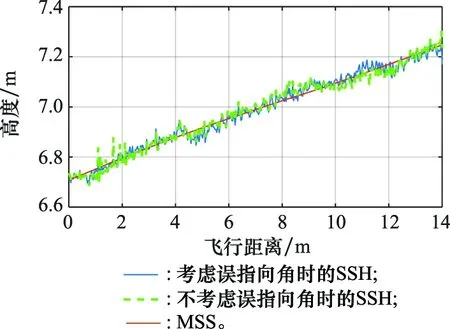
圖18 SSH與MSS對比結果Fig.18 Comparison result of SSH and MSS
4 結 論
本文首先研究了SAR高度計回波預處理方法,包括多普勒波束銳化、子視回波配準、延遲距離校正和多視處理等;然后研究了改進的回波模型和最小二乘重跟蹤算法;最后基于前文形成的全鏈路數據處理方法,對Ka頻段SAR高度計海面機載試驗數據進行處理,反演得到了飛行航線對應的SSH。反演結果與模型數據非常吻合,驗證了本文數據處理方法的正確性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19