基于改進FxLMS算法的懸臂梁振動研究
2022-09-01 10:37:54張麗雯姜金華
自動化儀表 2022年8期
張麗雯,姜金華
(1.上海第二工業大學資源與環境工程學院,上海 201209;2.上海第二工業大學智能制造與控制工程學院,上海 201209)
0 引言
振動[1]是物體的往復運動,是自然界和工程界的普遍現象。人與機械交互時,噪聲問題也通常被歸為振動問題[2]。工業生產制造中難免會產生振動,而這種振動會影響到工業生產。特別是對于精密器件和超精密加工設備的使用,任何微小的振動干擾都很有可能對測量數據和設備本身產生嚴重的影響。因此,如何有效地控制振動一直是國內外深入研究的課題。
主動噪聲控制(active noise control,ANC)是一種振動控制的新技術[3]。與被動振動控制相比,主動振動控制對于低頻的隔振效果更好,而且對外界環境有較強的適應能力。如今,主動振動控制被廣泛應用于工業領域。自適應濾波算法是主動噪聲控制研究的重點。對于復雜設備與裝置可能存在的結構非線性與時變環節,自適應濾波算法具有較好的技術特點與優勢[4]。常用的自適應濾波算法是基于維納濾波的最小均方(least mean suqare,LMS)算法。該算法具有結構簡單、性能穩定、計算復雜度低和易于實現等特點。
20世紀80年代,Morgan、Widrow及Burgess提出了獲得廣泛應用的濾波-x最小均方(filtered-x least mean suqare,FxLMS)算法[5],解決次級通道引起的系統不穩定問題。2011年,周亞麗等提出了基于反正切變換的濾波-x最小均方算法(filtered-x arctangent least mean suqare,FxatanLMS)[6],解決了脈沖噪聲高尖峰特性引起的系統不穩定問題。2013年,Wu提出了Fair算法[7],利用Fair函數對誤差信號進行非線性變換。Fair函數的特性是連續平滑且僅有一個可調閾值參數,避免了選擇參數和估測閾值的麻煩,算法性能更好。
Oh.J等利用FxLMS算法對懸臂梁主動振動控制系統進行了試驗研究,驗證了FxLMS算法的可行性[8]。Meng等提出了一種基于壓電堆作動器的直升機機身多輸入多輸出多諧波前饋自適應自動電壓控制(automatic roltagecontrol,AVC)方法。該方法由諧波系數辨識和多輸入多輸出多諧波(multi-input multi-output multi-harmonic,MIMOMH)前饋FxLMS算法組成[9]。Li等將反饋FxLMS算法和比例積分微分(proportional integral differential,PID)控制器相結合,提出了混合PID-FxLMS算法,并將其應用于壓電懸臂梁振動控制中[10]。王歡等通過有限元模型,應用正位反饋技術研究了多階模態的主動振動控制[11]。
本文首先在傳統FxLMS算法的理論基礎上,根據反雙曲正弦函數,提出了一種新的FxLMS算法,即FxasinhLMS算法;然后分別在Simulink和機械系統的力學自動分析(automatic dynamic analysis of mechanical system,ADAMS)中建立了FxLMS控制仿真系統和懸臂梁有限元模型,連接兩者進行聯合仿真。在聯合仿真控制系統中,分別對FxLMS、Fair、FxatanLMS算法和本文提出的FxasinhLMS算法進行仿真測試。仿真測試結果證明了FxasinhLMS算法在懸臂梁振動主動控制應用中的有效性和優越性。
1 自適應濾波算法
1.1 LMS算法
LMS算法是線性自適應濾波器算法,其作用是調整濾波器的權系數。LMS算法以最小均方誤差(mean square error,MSE)為判據,使期望信號與濾波器輸出信號之差的平方的期望值最小[12]。基于LMS算法的自適應濾波器結構如圖1所示。
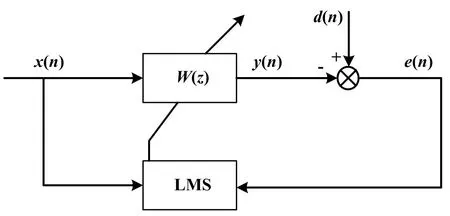
圖1 基于LMS算法的自適應濾波器結構圖
自適應濾波器W(z)采用有限脈沖響應(finite impulse response,FIR)結構。圖1中:x(n)為輸入信號;d(n)為期望信號;y(n)為濾波器輸出信號;e(n)為誤差信號;權系數矢量W根據最小均方判據調整。
對于FIR濾波器,n時刻的濾波器輸出為:
(1)
式中:T為轉置符;X(n)為n時刻的輸入矢量;N為濾波器的階數;wi(n)為n時刻第i個權系數,i=0,1,...,N-1。
根據圖1,均方誤差ε表示為:
ε=E[e2(n)]=E[d(n)-y(n)]2
(2)
將式(1)代入式(2),可得:
ε=E[d(n)-WT(n)X(n)]2
(3)
從式(3)可以看出,均方誤差是權系數矢量W的二次型函數,在均方誤差達到最小時,權矢量W*達到最優。W*一般采用迭代算法來求解,常用方法是最速下降法,即:
(4)
式中:u為步長;W(n)為n時刻的濾波器權系數矢量;(n)為第n次迭代的梯度矢量;W(n+1)采用最速下降法,可以逼近最佳值。
對于LMS算法,第n次迭代的梯度矢量表示為:
(5)
用瞬時值代替式(5)中的數學期望,得到的梯度估計值稱為瞬時梯度。則有:
(n)=-2e(n)X(n)
(6)
顯而易見,瞬時梯度矢量是真實梯度矢量的無偏估計。此時,式(4)的迭代公式可寫成:
W(n+1)=W(n)+ue(n)X(n)
(7)
為了確保算法的穩定性,步長的取值范圍為:
(8)
式中:tr(R) 為輸入信號自相關的跡,等于R對角線上的元素之和。
(9)
1.2 FxLMS算法
為了修正LMS算法的誤差梯度估計值,在LMS的基礎上增加了次路徑模型。考慮到次路徑的影響,為了確保系統的穩定性,需要對LMS算法的瞬時梯度估計作修正。xf(n)取代了LMS中的參考輸入信號x(n)。xf(n)是參考輸入信號x(n)經次路徑S(z)濾波后得到的,所以這種算法被稱為FxLMS算法。前饋FxLMS算法結構如圖2所示。
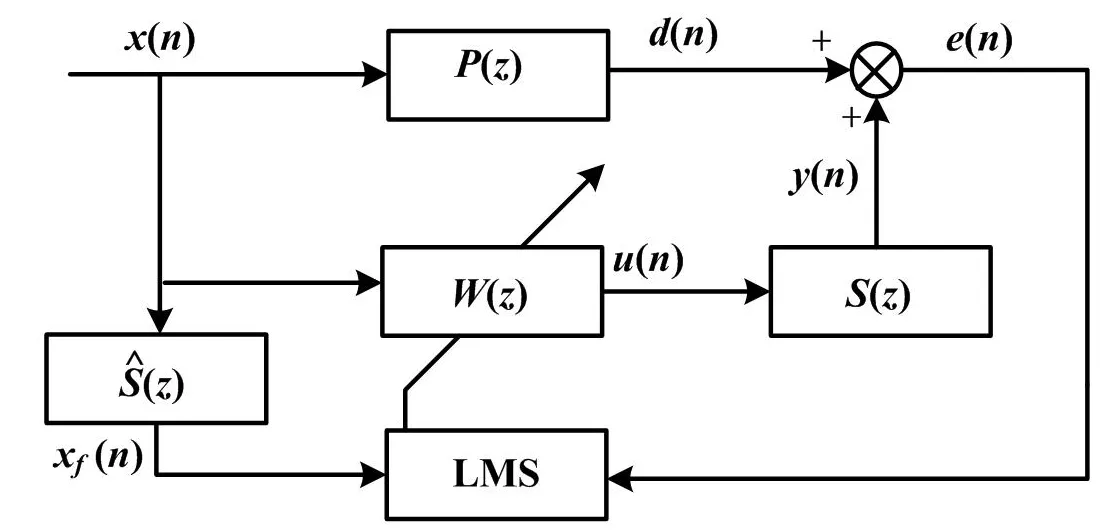
圖2 前饋FxLMS算法結構圖

前饋FxLMS算法的步驟如下。
①采集輸入信號x(n)。
②計算濾波器的輸出信號u(n):
(10)
式中:N為濾波器階數。
③輸入信號u(n)至次路徑。
④計算濾波-x信號xf(n):
(11)

⑤計算誤差信號e(n):
e(n)=d(n)-y(n)
(12)
⑥采用FxLMS算法,更新W(z)的權系數:
W(n+1)=W(n)-u×e(n)×xf(n)
(13)
2 改進的算法
FxLMS算法的迭代穩定性會受到誤差信號e(n)的影響。為了保證算法的穩定性,本文提出一種改進方法,即設計一種新的非線性變換函數對誤差信號e(n)作處理。
本文利用反雙曲正弦函數對誤差信號e(n)進行變換,提出FxasinhLMS算法。變換后的誤差信號函數只有一個可調參數。其參數確定方法簡單,避免了選擇參數和估測閾值參數的麻煩。其誤差變換函數為:
(14)
式中:α為系數;sinh-1為反雙曲正弦。
將式(14)代入式(13),則濾波器進行自適應更新的迭代公式為:
W(n+1)=W(n)-u×φ[e(n)]×xf(n)
(15)
使用反雙曲正弦函數對誤差信號進行非線性變換,使變換后的誤差信號具有界二階矩。反雙曲正弦函數的特點是連續單調有界、奇對稱,即當x→0時,f(x)→0,可以保證函數的收斂性和穩定性。假設X是一個符合正態分布的隨機變量,定義Y=sinh-1(X)。因為反雙曲正弦函數具有奇對稱特性,所以其期望E(Y)=0。根據方差的計算公式,Y的方差為:
s(Y)=E[Y-E(Y)]2
(16)
(17)
由維納濾波器原理可知,n時刻濾波器一定存在一個使得誤差最小的最優解。因此,需要確定u的取值范圍,以確保算法收斂。
假設w0是最優權系數矢量,w0xf(n)≈-d(n),則偏差矢量ε(n)為:
ε(n)=w0-W(n)
(18)
在式(16)兩端分別減去w0,有:
W(n+1)-w0=W(n)-w0-uφ[e(n)]xf(n)
(19)
ε(n+1)=ε(n)+uφ[e(n)]xf(n)
(20)
定義均方偏差σ(n)為:
(21)
式(20)兩邊取歐式2范數并求期望,得到:
(22)
考慮到:
(23)
(24)
假設:
εT(n)xf(n)=[w0(n)-w(n)]xf(n)≈-[d(n)-y(n)]=-e(n)
(25)
那么,式(23)可以寫成:
Δ(n)=σ(n+1)-σ(n)<0
(26)
當算法收斂,步長應該滿足下列條件:
(27)
3 懸臂梁振動主動控制聯合仿真系統
3.1 建立FxLMS算法的控制系統
系統核心是基于FxLMS算法的自適應濾波器,采用Matlab Function進行FxLMS算法的編寫。
控制仿真系統利用兩個傳遞函數模塊分別替代實際懸臂梁的主通道和次級通道。假設理想情況下次級通道和次級通道估計的傳遞函數相同。
3.2 建立ADAMS模型
本文以懸臂梁作為研究對象,借助ADAMS軟件建立懸臂梁有限元模型。ADAMS的工作柵格為默認的笛卡爾坐標系,以steel作為懸臂梁材料。懸臂梁材料的長、寬、高分別為900 mm、25 mm、1 mm,密度為7.80×10-6kg/m。楊氏模量為2.07×105Pa,泊松比為0.29。懸臂梁受到外界刺激會發生變形,所以要把懸臂梁構件變成柔性體再作進一步的處理。本文采用ADAMS/ViewFlex建立柔性體,以代替原先的剛性體。
聯合仿真需要ADAMS和Simulink兩個軟件進行數據通信:首先,定義ADAMS的輸入變量為添加在懸臂梁根部和中間位置的兩個控制力,定義ADAMS的輸出變量為懸臂梁上五個標記點位置的變化;然后,采用varval()函數對定義的輸入變量進行處理,使得輸入變量與Simulink中的輸入信號進行相關聯;最后,完成ADAMS和Simulink這兩個軟件之間的數據通信。
定義ADAMS的輸入輸出變量后,將懸臂梁有限元模型通過Control Plant模塊導出。
3.3 構建聯合仿真系統
聯合仿真的目的是實現機械系統和控制系統一體化。首先,在Matlab/Simulink中輸入ADAMS模塊。ADAMS模塊如圖3所示。
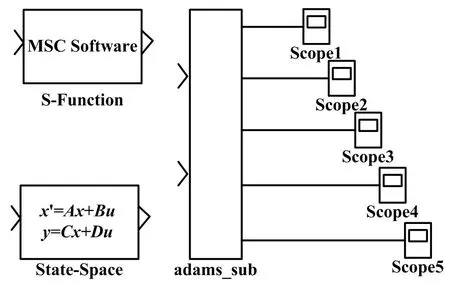
圖3 ADAMS模塊
將圖3中的ADAMS模塊與基于FxLMS算法的控制仿真系統相連接,得到機械系統與控制系統一體化的懸臂梁振動主動控制聯合仿真系統。懸臂梁振動主動控制聯合仿真系統如圖4所示。
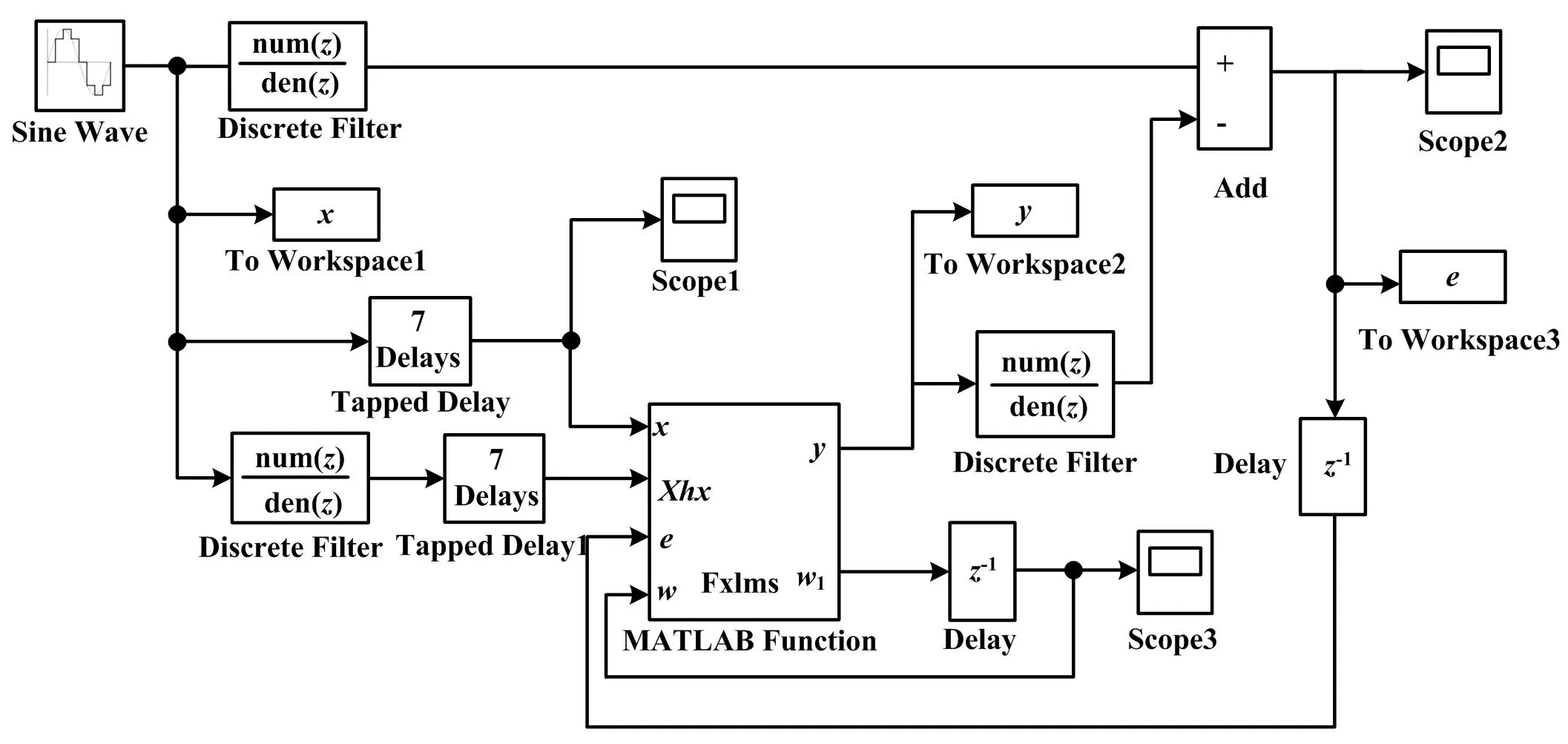
圖4 懸臂梁振動主動控制聯合仿真系統
在懸臂梁振動主動控制聯合仿真系統中,輸入信號為正弦信號。該信號的頻率為一階模態頻率14 Hz。因為在低階頻率振動條件下,一階模態存在的能量是最大的。一階模態頻率14 Hz是通過給定ADAMS模塊一個掃頻信號,然后對模塊的輸出信號作頻譜分析所得到的。
聯合仿真試驗中,FxLMS算法通過跟隨輸入信號產生輸出信號,利用其控制器產生控制力,再將其作用到懸臂梁模型需要消除振動的位置,與輸入信號在該位置產生的響應相互抵消,從而實現降低懸臂梁振動。
4 仿真測試結果及分析
本文使用Matlab2016b、ADAMS2020這兩個仿真軟件,分別采用FxLMS、Fair、FxatanLMS和本文提出的FxasinhLMS算法在懸臂梁振動主動控制聯合仿真系統中進行仿真。通過仿真獲取每種算法的控制效果,并采用量化標準進行控制效果的比對,從而比較四種算法的性能。四種算法的仿真結果如圖5所示。
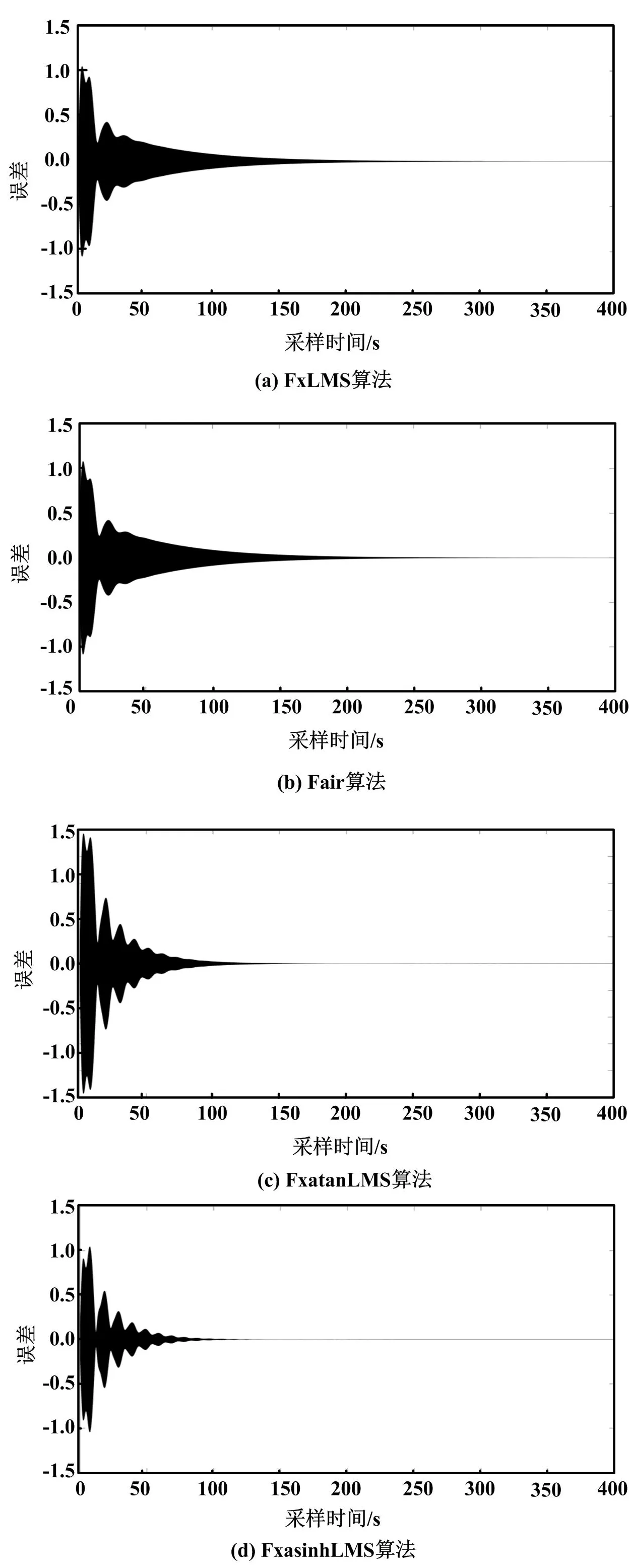
圖5 四種算法的仿真結果
設定仿真試驗參數如下:作為控制器的自適應濾波器階數為8;Fair算法中,閾值c=5;FxasinhLMS算法中,α=3;FxLMS、Fair、FxatanLMS、FxasinhhLMS算法中,固定步長μ=0.0 000 001;采樣頻率為0.001 Hz;采樣時間為400 s。
給定一個幅值1 V、頻率14 Hz的正弦信號作為激勵信號,利用FxLMS、Fair、FxatanLMS、FxasinhhLMS算法分別進行聯合仿真。
對輸入信號x和FxLMS、Fair、FxatanLMS、FxasinhhLMS四種算法進行頻譜分析。頻域結果如圖6所示。
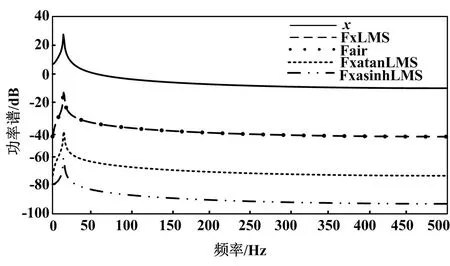
圖6 頻域結果
圖6中,因為激勵信號的頻率是14 Hz,所以四種算法均在14 Hz時功率譜出現尖峰。當頻率大于14 Hz后,隨著頻率增大,四種算法穩態誤差的功率譜均呈逐漸衰減趨勢。在頻率為14 Hz時,四種算法對懸臂梁的振動都有衰減。該結果表明,四種算法均對懸臂梁振動有著一定的控制效果。其中,FxasinhhLMS算法的衰減效果最好。
主動振動控制應用中,算法的控制效果通常采用穩態誤差和收斂速度這兩個指標來評估。在本文的懸臂梁振動主動控制聯合仿真系統仿真試驗中,將系統達到穩定時對應的采樣點作為起點,往后取100個采樣點;以這100個采樣點對應誤差的平均值作為穩態誤差指標,并以系統達到穩定時所用的迭代次數作為收斂速度指標。通過聯合仿真得到的四種算法穩態誤差和迭代次數如表1所示。
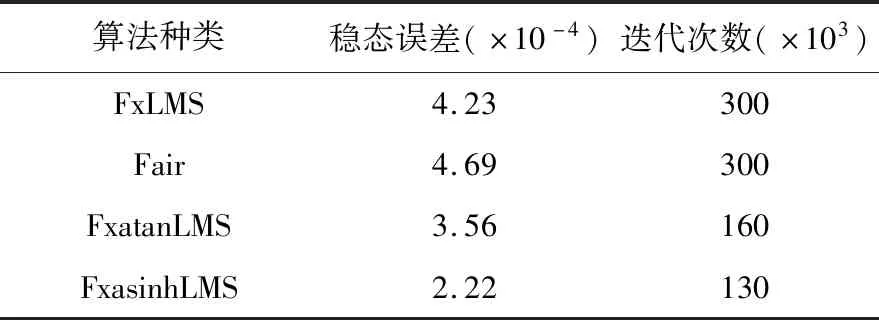
表1 四種算法穩態誤差和迭代次數
由表1可知,基于FxasinhhLMS算法的仿真系統穩態誤差為3.56×10-4,經過160 000次迭代達到穩定,其穩態誤差和迭代次數均小于其他三種算法。經過比對,FxasinhhLMS算法的穩態誤差減少了37%~52%、迭代次數減少了19%~57%。
5 結論
本文在Simulink中建立懸臂梁振動主動控制聯合仿真系統,采用FxLMS算法作為自適應濾波算法,并基于傳統FxLMS算法提出一種新的主動振動控制FxasinhLMS算法。該算法在原有的算法基礎上對誤差信號進行了改進,并利用反雙曲正弦函數對誤差信號進行非線性變換。分別將FxLMS、Fair、FxatanLMS、FxasinhhLMS算法在懸臂梁振動主動控制聯合仿真系統中進行仿真。對比仿真結果可知,與FxLMS、Fair、FxatanLMS相比,FxasinhhLMS算法的系統穩態誤差減小了37%~52%、迭代次數減少了19%~57%。FxasinhhLMS算法有效地解決了傳統FxLMS算法無法平衡穩態誤差和收斂速度的問題,使系統性能得到了明顯的改善。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
