基于CNN的MPTC與DTC自適應切換的表貼式永磁同步電機控制策略*
2022-08-31 06:55:22李耀華劉東梅趙承輝劉子焜王孝宇陳桂鑫
電機與控制應用 2022年5期
李耀華,劉東梅,趙承輝,劉子焜,王孝宇,陳桂鑫
(1.長安大學 汽車學院,陜西 西安 710064;2.中國重型汽車集團有限公司,山東 濟南 250102)
0 引 言
永磁同步電機(PMSM)模型預測轉矩控制(MPTC)基于電機磁鏈和轉矩預測模型,遍歷逆變器所有電壓矢量,計算下一時刻的電機磁鏈和轉矩值,并根據成本函數選擇最優電壓矢量。MPTC定量評估電壓矢量控制效果并選擇最優值,控制性能優越,同時成本函數柔性靈活,易于實現多目標控制和非線性環節,近年來成為PMSM控制領域的研究熱點之一[1-4]。但MPTC需要將所有電壓矢量遍歷代入至預測模型計算下一時刻預測值,計算量較大。文獻[5]舍棄部分預測價值較小的電壓矢量來減少備選電壓矢量數目。文獻[6]采用簡化的預測模型來預測計算的復雜度。文獻[7]從硬件角度出發采用多核并行計算架構來提升實時性。
神經網絡通過對數據的學習和訓練可充分逼近復雜的非線性映射關系,將所有定量或定性的信息分布儲存于網絡的各神經元中,具有快速大量運算的能力和線上推理速度,可滿足實時性要求[8-9]。MPTC根據成本函數從備選電壓矢量中選擇最優電壓矢量,本質上是一個非線性映射下的多分類。因此,可訓練神經網絡模型來學習并取代MPTC的分類規律。由于電機系統大多處于穩態狀態,網絡訓練的數據基本以穩態數據為主,反映動態過程的數據較少,穩態數據和動態數據失衡,導致神經網絡更傾向于穩態分類規律[10-11]。當電機系統處于動態時,控制性能下降,甚至有失控的風險。文獻[12]通過擴充動態數據,使得動態數據和穩態數據達到平衡,但由于電機動態響應快,動態數據收集的工作量較大。文獻[13]將直接轉矩控制(DTC)與神經網絡選擇的電壓矢量作為2個備選電壓矢量,再利用MPTC選擇最優電壓矢量,但這增加了MPTC的計算量。
本文建立基于卷積神經網絡(CNN)的MPTC,并針對動態下CNN控制性能下降的問題,提出根據系統狀態在基于CNN的MPTC和DTC之間自適應切換的策略。仿真結果表明基于CNN的MPTC與傳統MPTC性能基本相當,自適應切換策略可在保證穩態控制性能的同時改善動態控制性能,有效抑制動態下磁鏈脈動。
1 基于CNN的MPTC
1.1 表貼式PMSM的MPTC
定子磁鏈坐標系下,表貼式永磁同步電機(SPMSM)的定子磁鏈和轉矩預測模型為
(1)

(2)
式中:ψs(k)和ψs(k+1)為k和k+1時刻定子磁鏈幅值;Vs(k)為施加電壓矢量幅值;α為施加電壓矢量與定子磁鏈的夾角;Δt為采樣時間;δ(k)為k時刻轉矩角;p為電機極對數;ψf為永磁體磁鏈;Ld為d軸電感。
MPTC的成本函數為
g=

(3)
MPTC的備選電壓矢量為
Vs∈{V0,V1,V2,V3,V4,V5,V6}
(4)
式中:Vs為備選電壓矢量;V0~V6為逆變器產生的7個基本電壓矢量,其中零電壓矢量可由2個開關狀態(111或000)生成,具體選擇以開關次數最小為原則[14]。
MPTC將7個電壓矢量代入至磁鏈和轉矩預測模型,基于預測結果求解得到7個成本函數,并選擇令成本函數最小的電壓矢量作為輸出電壓矢量。因此,可將其視為非線性映射下的多分類任務,從而訓練神經網絡以逼近分類規律。
1.2 特征工程與訓練數據集建立
根據磁鏈和轉矩預測模型及成本函數,選擇當前k時刻的轉速差、參考轉矩、定子磁鏈幅值、定子磁鏈幅值誤差、轉矩角和定子磁鏈角位置等6個變量作為網絡的特征輸入,網絡的輸出即為式(4)所示的7個基本電壓矢量之一。
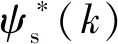
基于MATLAB/Simulink建立SPMSM MPTC仿真模型系統,用于神經網絡訓練數據集的建立和收集。仿真模型為離散模型,采樣周期為5×10-5s。直流母線電壓為312 V,轉速PI調節器參數為Kp=5,KI=100,PI調節器輸出上下限為[-35 N·m,35 N·m]。仿真用SPMSM參數如表1所示。
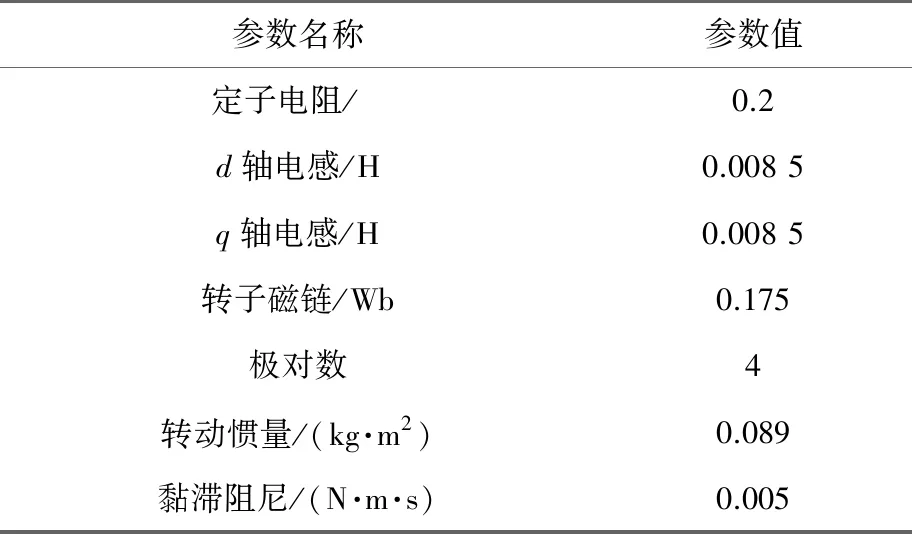
表1 仿真用SPMSM參數
訓練集建立條件設置如下:參考定子磁鏈幅值為0.3 Wb。參考轉速分別為-60、-30、-10、10、30、60 r/min,使用斜坡函數設置負載轉矩在1 s時間內從-34 N·m變化到-10 N·m以及1 s時間內從10 N·m變化到34 N·m;負載轉矩分別為-34、-30、-25、-20、-15、-10、10、15、20、25、30、34 N·m,使用斜坡函數設置參考轉速在1 s時間內從-60 r/min變化到60 r/min。通過以上24組仿真試驗,共得到480 000組含6個輸入和1個輸出的訓練數據。隨機抽取90%的數據作為訓練集和剩余10%的數據作為測試集。
1.3 CNN建立、訓練與應用
CNN可有效降低網絡復雜度,減少訓練參數數目,具有較強的魯棒性和容錯能力,易于訓練和優化[15]。因此,本文選擇CNN作為網絡模型,網絡輸入為通道數為1、尺寸為1×6的特征矢量。為了充分提取特征信息,本文采用兩層卷積層,其中第一層卷積層使用16個尺寸為1×2的一維卷積核,每個卷積核分別與輸入特征矢量進行局部連接和卷積計算,并以步長為2進行窗口滑動實現特征提取,輸出特征映射。第二層卷積基于上述特征映射,使用32個尺寸為1×2的一維卷積核,以步長為1進行滑動連接,以實現進一步的特征編碼,并輸出給全連接層用于分類輸出。全連接層整合卷積層提取到的特征映射,將結果輸出至輸出層。輸出層為對應7個電壓矢量的類別得分,并通過Softmax邏輯回歸轉換為概率分布,從而得到神經網絡判斷的輸出電壓矢量。本文采用的CNN的拓撲結構如圖1所示。
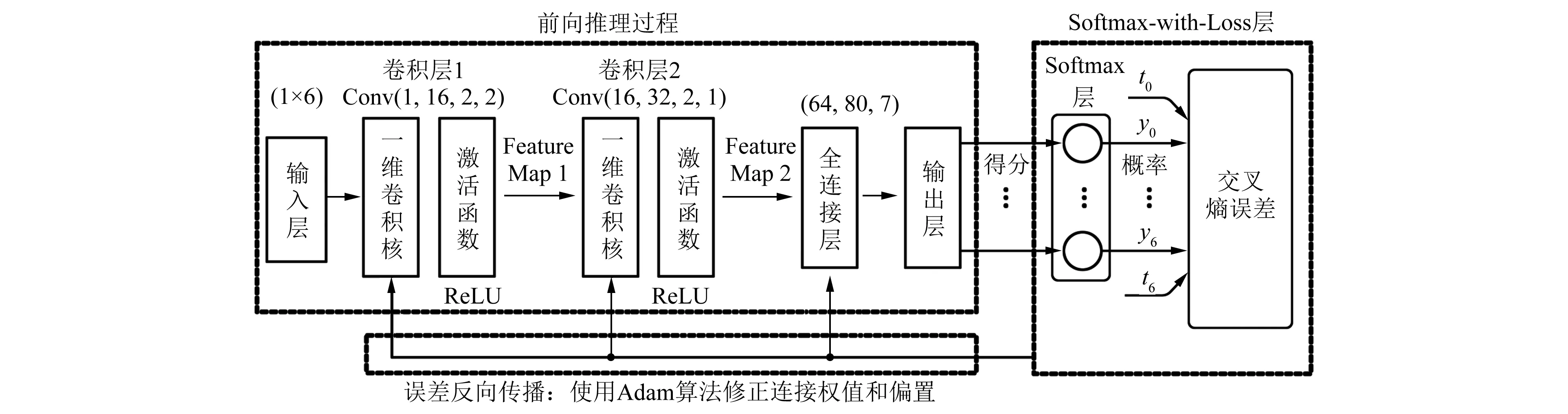
圖1 CNN拓撲結構
CNN的訓練包括前向推理和誤差反向傳播兩個過程,誤差反向傳播過程通過梯度法尋找使得損失函數減少最多的方向,采用交叉熵函數作為損失函數,使用Adam優化器進行參數更新,學習率設定為0.001。重復前向推理和誤差反向傳播2個過程就可以不斷修正卷積層和全連接層的連接權值和偏置等網絡參數,從而逐步逼近輸入輸出之間的映射關系。
定義CNN選擇的電壓矢量與MPTC選擇的電壓矢量一致的概率為準確率,用于評價CNN分類性能的優劣。訓練集和測試集的準確率如圖2所示。
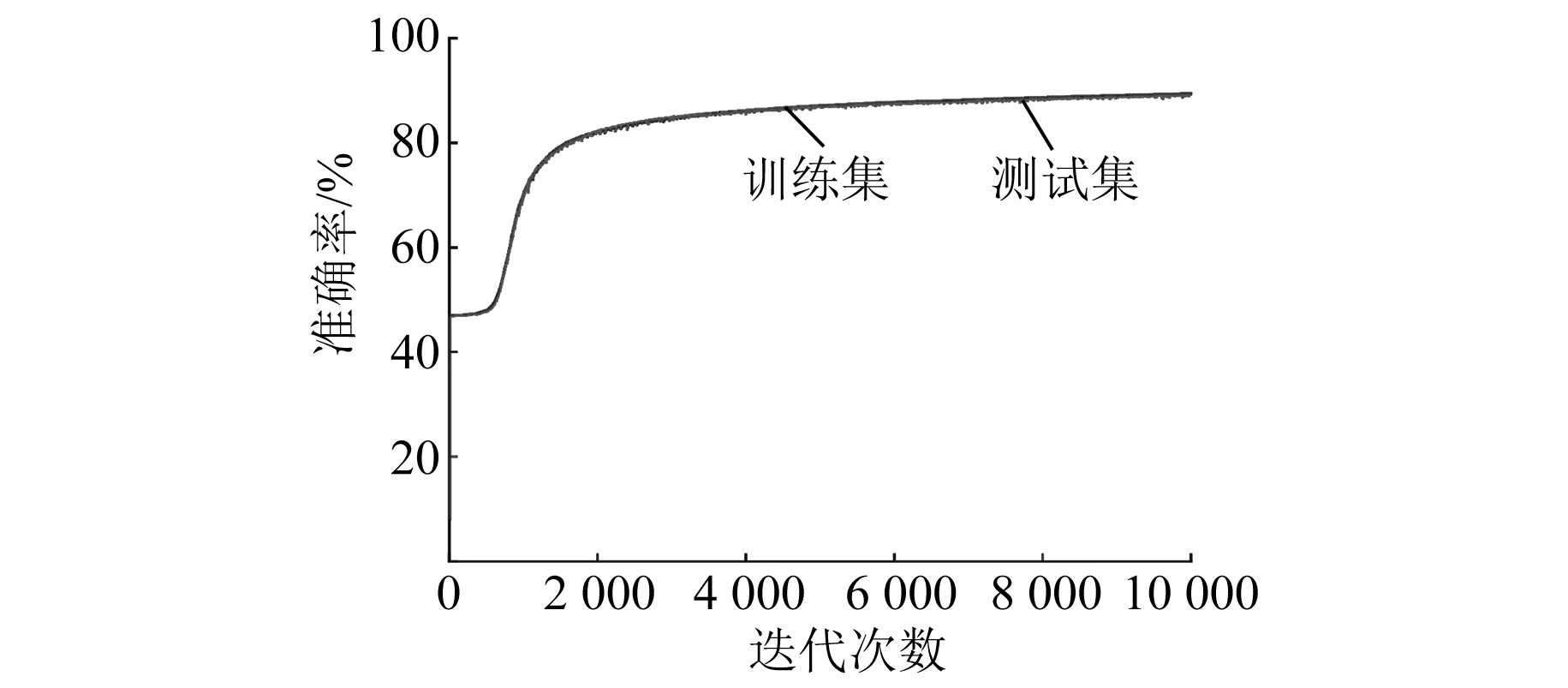
圖2 訓練集和測試集準確率
圖2表明準確率隨迭代次數增加而增大,并趨向穩定,且無過擬合和欠擬合傾向。CNN的分類準確率最終為86%。將訓練成熟的CNN取代原有的MPTC,則可實現基于CNN的PMSM MPTC系統,如圖3所示。
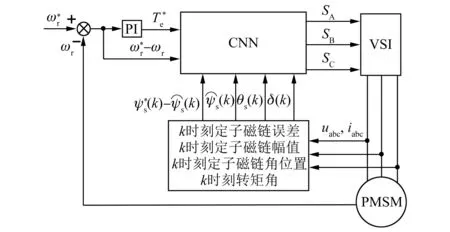
圖3 基于CNN的PMSM MPTC系統
2 仿真驗證
通過編寫S函數調用Python腳本的方式建立Python與MATLAB/Simulink的聯合仿真模型。電機系統仿真參數與上文相同。參考轉速初始為60 r/min,1 s階躍至-60 r/min。負載轉矩初始為15 N·m,0.5 s階躍至-15 N·m,1.5 s階躍至15 N·m。參考定子磁鏈幅值為0.3 Wb。采樣周期為5×10-5s,仿真總時長為2 s。傳統MPTC和基于CNN的MPTC下的PMSM轉矩和定子磁鏈幅值分別如圖4~圖7所示。
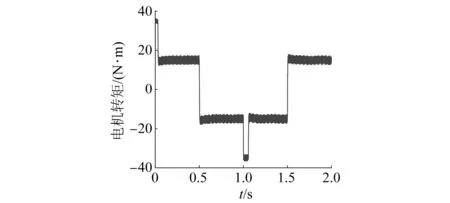
圖4 傳統MPTC下電機轉矩
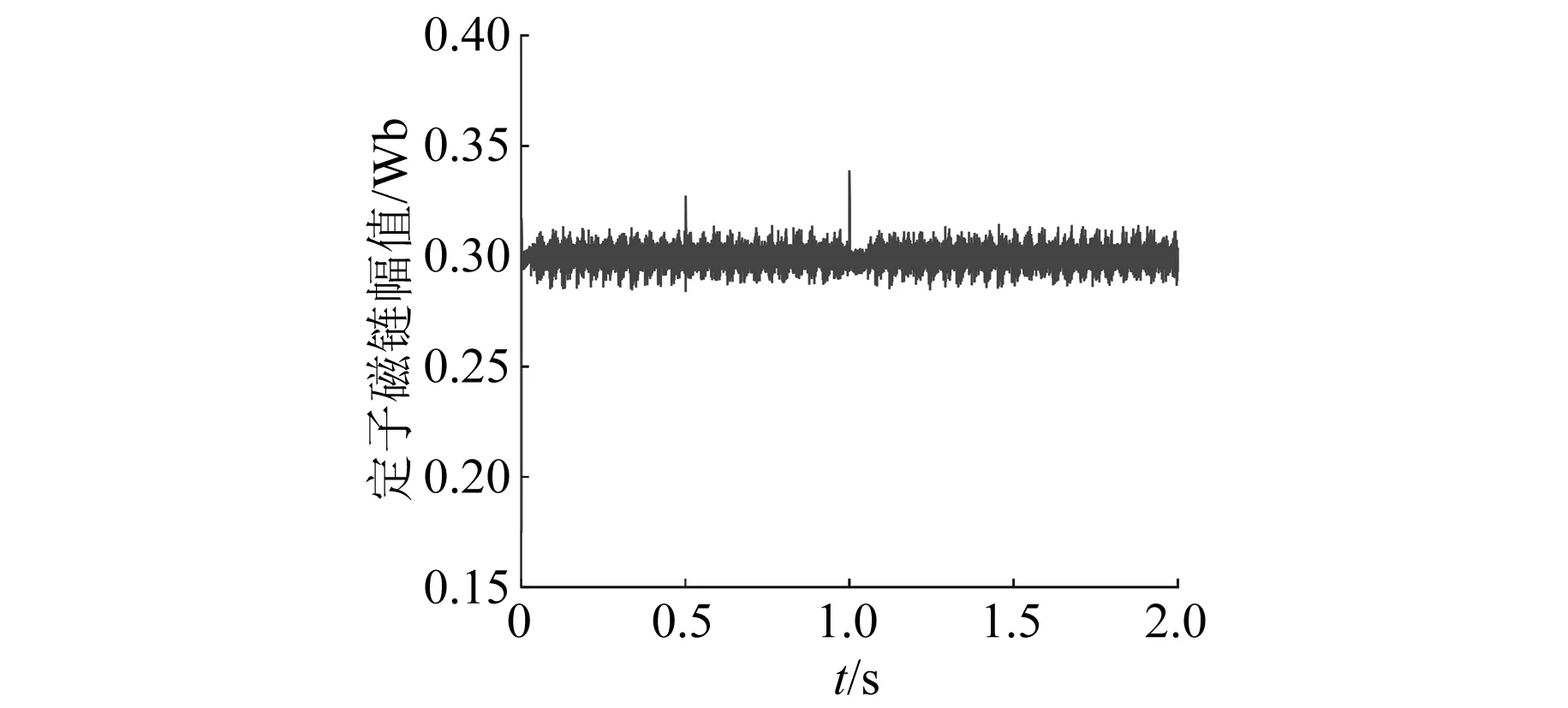
圖5 傳統MPTC下定子磁鏈幅值
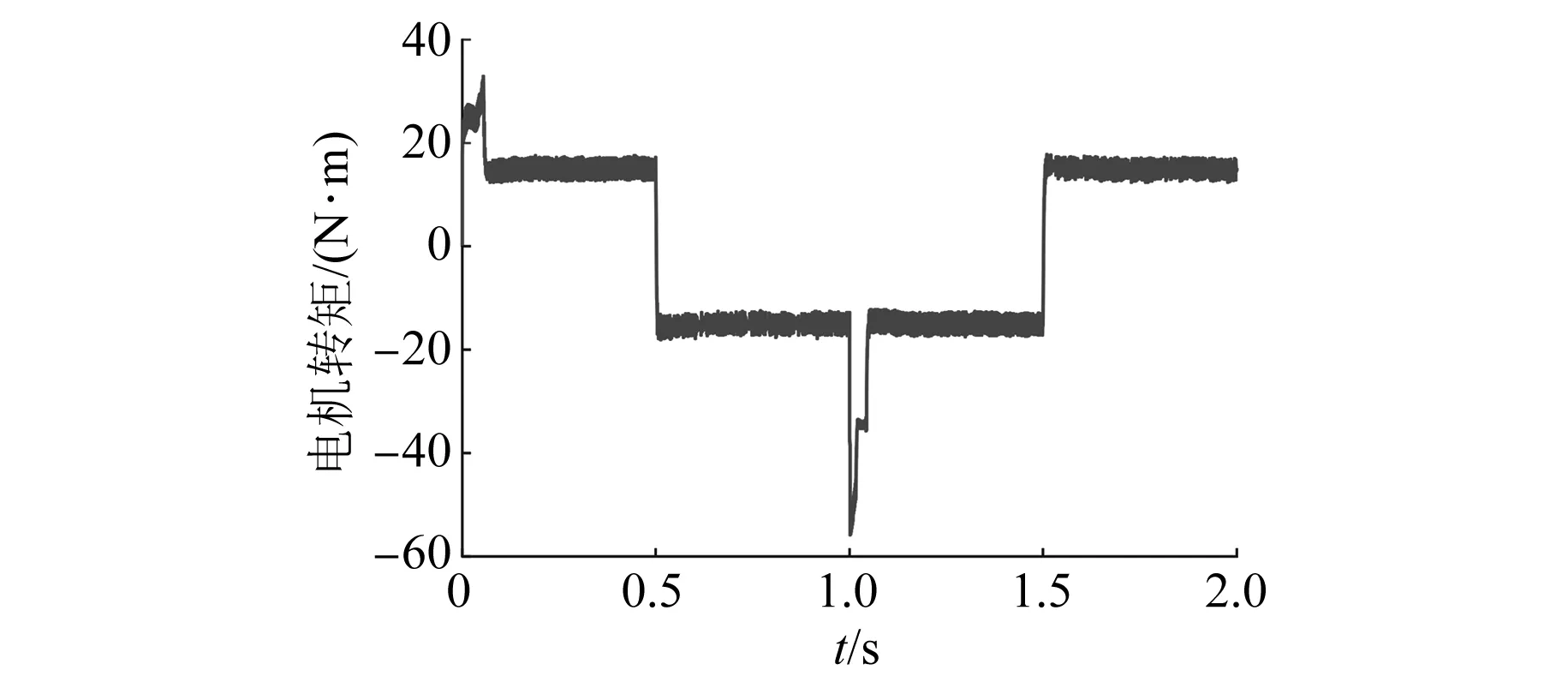
圖6 基于CNN的MPTC電機轉矩
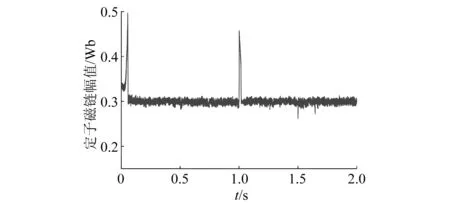
圖7 基于CNN的MPTC定子磁鏈幅值
仿真結果表明,基于CNN的PMSM MPTC系統穩態性能良好,可實現四象限運行,但在起動和轉速階躍動態下控制性能較差,磁鏈脈動較大。
為了定量評價系統穩態控制水平,定義轉矩脈動均方根誤差(RMSE)和磁鏈脈動RMSE,具體如下:
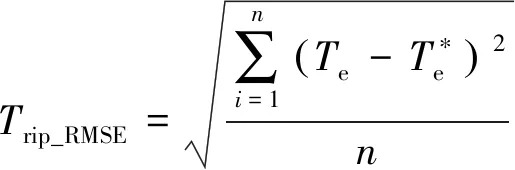
(5)
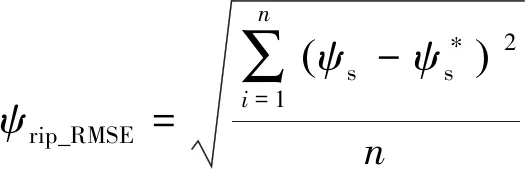
(6)
式中:n為采樣個數。
在0.2~0.4 s、0.6~0.8 s、1.2~1.4 s和1.6~1.8 s 4個穩態時段內,傳統MPTC和基于CNN的MPTC的轉矩脈動RMSE和磁鏈脈動RMSE如表2所示。
由表2可知,基于CNN的MPTC穩態性能與傳統MPTC基本相當。
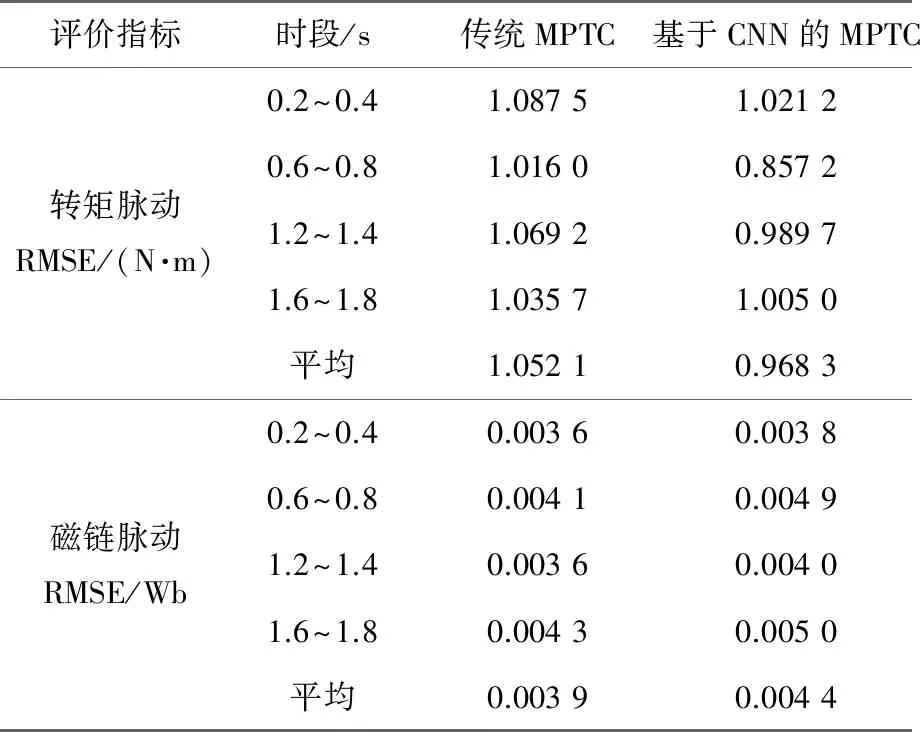
表2 不同控制策略下系統性能對比
在上述仿真條件下運行傳統MPTC,同時并行運行基于CNN的MPTC,但是神經網絡選擇的電壓矢量并不作為最終輸出,僅用于與傳統MPTC選擇的電壓矢量進行對比。以0.01 s為時間單位統計各時間單位內電壓矢量選擇一致率,如圖8所示。
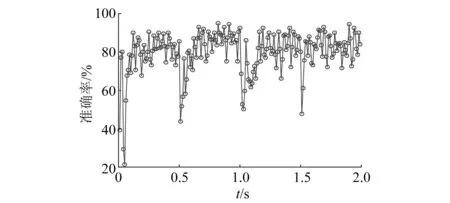
圖8 電壓矢量選擇一致率
由圖8可知,穩態下CNN具有較高的電壓矢量選擇準確率,這也是CNN控制與MPTC兩者控制效果基本相當的原因。但在動態階躍下,CNN選擇準確率急劇下降。CNN控制下動靜態性能出現明顯差異的根本原因為MPTC穩態和動態下成本函數選擇電壓矢量傾向性有較大差異。由于CNN控制的訓練數據中動態訓練數據占比很小,網絡更傾向于穩態下的選擇規律,從而造成動態下準確率較低,磁鏈控制效果較差[16]。
3 自適應切換策略
為了提高CNN的動態控制性能和魯棒性,提出根據系統狀態將基于CNN的MPTC與DTC自適應切換策略。當系統處于穩態時,采用基于CNN的MPTC,而當系統處于動態時,采用DTC。本文采用轉矩誤差絕對值和磁鏈誤差絕對值判斷系統狀態。當轉矩誤差絕對值大于3 N·m或定子磁鏈誤差大于0.015 Wb時,認為系統處于動態;否則,認為系統處于穩態。相同仿真條件下,自適應切換控制下的PMSM轉矩和定子磁鏈幅值如圖9和圖10所示。
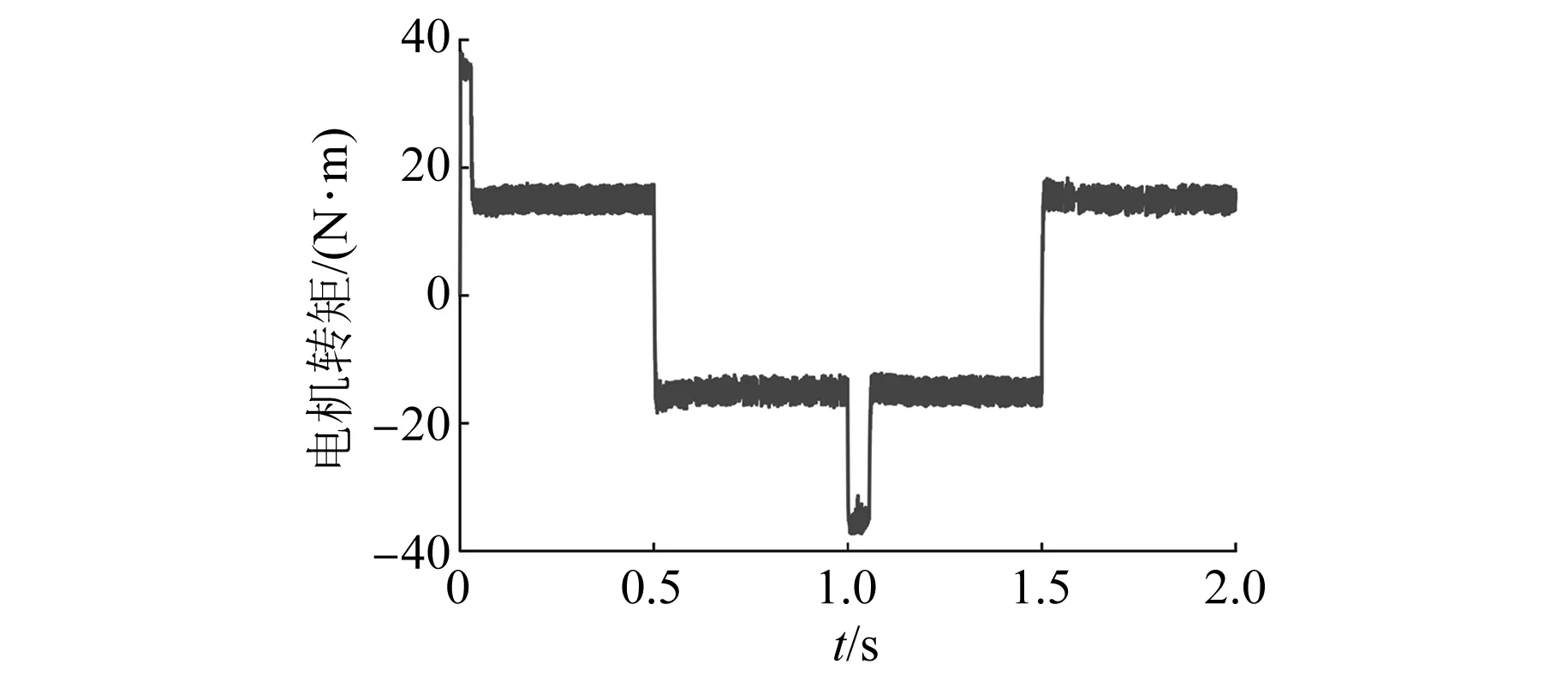
圖9 自適應切換控制下的電機轉矩
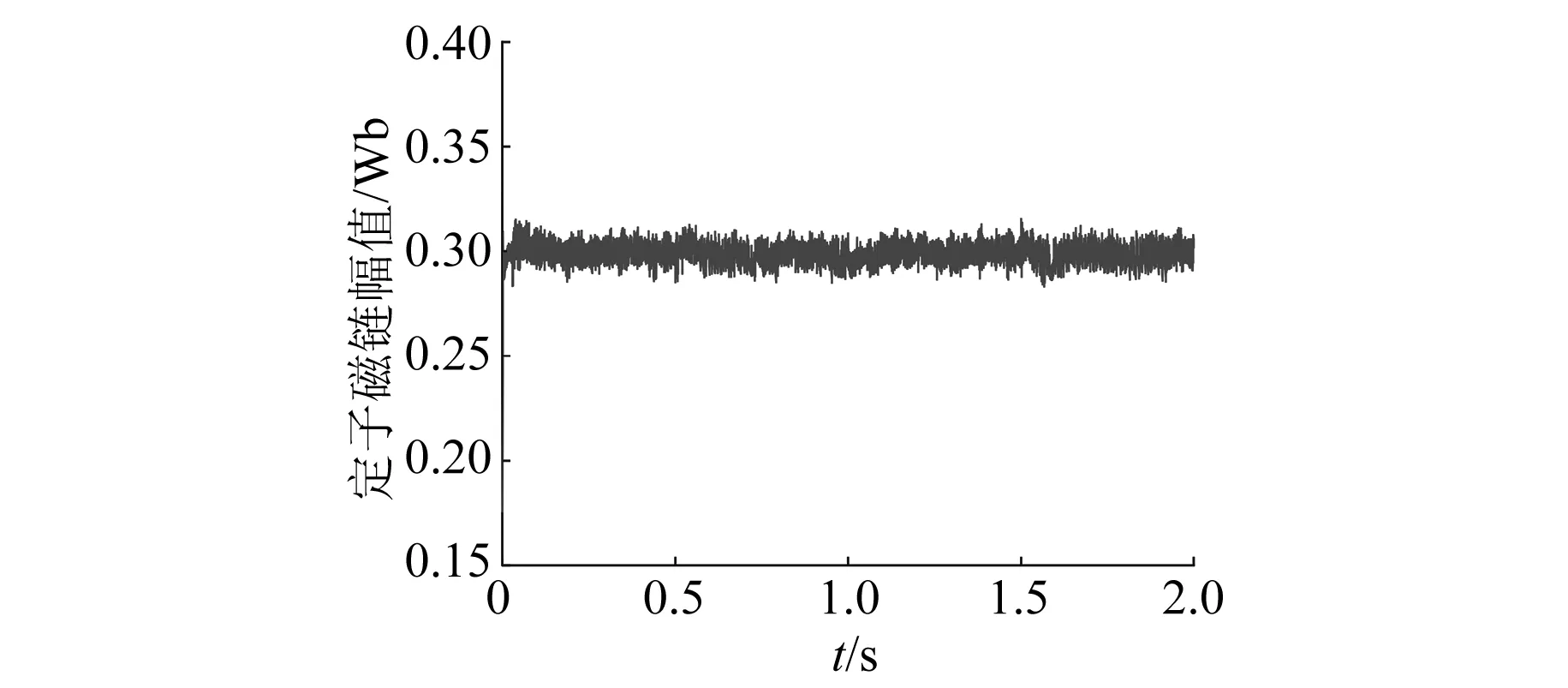
圖10 自適應切換控制下的定子磁鏈幅值
穩態下,PMSM轉矩脈動RMSE和磁鏈脈動RMSE如表3所示。
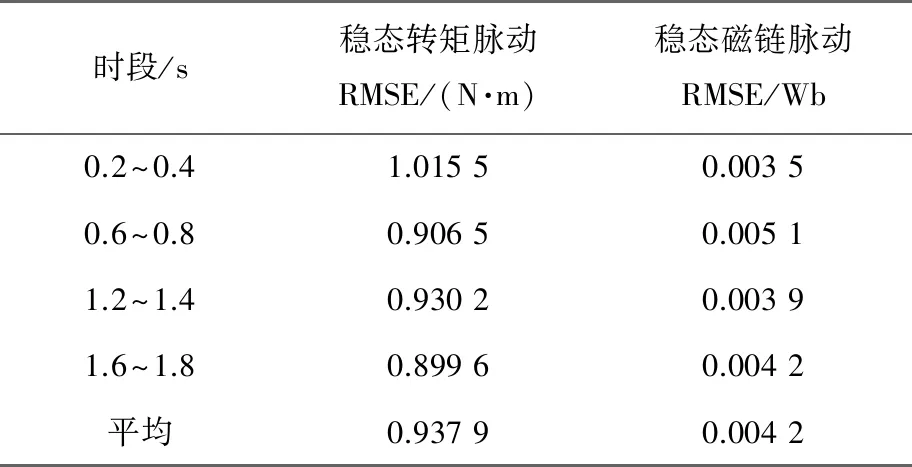
表3 自適應切換控制下系統性能
仿真結果表明,自適應切換策略可在保證穩態控制性能基礎上,有效改善動態控制性能,抑制動態下的磁鏈脈動。經統計,基于CNN的MPTC在自適應切換控制策略中參與運行時間超過99%,DTC僅在起動和動態階躍等少量時刻下工作。這表明電機控制系統的控制性能主要取決于基于CNN的MPTC,DTC僅起動態糾錯的作用。
4 結 語
本文通過訓練CNN以替代MPTC,將計算量大、實時性差的遍歷尋優計算轉移至線下網絡訓練,線上僅進行快速推理和分類輸出。為了進一步提高CNN的動態控制性能,提出根據系統狀態將基于CNN控制的MPTC與DTC自適應進行切換的控制策略,在保證穩態控制性能基礎上改善動態控制效果,有效抑制動態下的磁鏈脈動。
