計及不確定性的智能機器人鉆錨機械臂運動學誤差分析
2022-08-31 03:47:16俞利賓楊碧濤
制造業自動化 2022年7期
俞利賓,楊碧濤,吳 昊
(1.紅河學院 工學院,蒙自 661199;2.云南省高校高原機械性能分析與優化重點實驗室,蒙自 661199)
0 引言
對于智能機器人鉆錨機械臂而言,末端執行器元件與主關節結構之間的運動關聯度能夠描述機械臂的運動誤差行為,運動關聯度指標的物理數值越大,機械臂運動誤差行為的表現能力也就相對較為薄弱。在一些動作單一的應用場合中,機械臂只要能夠準確到達各標記節點,就能夠滿足智能機器人的實際運動需求。隨著科學技術手段的不斷進步,機械臂的應用范圍也在逐漸擴大[1]。在此情況下,由于應用環境的日益復雜化,機械臂元件往往不能完全達到已標記的各個運動節點,這也是導致運動誤差行為出現的主要原因。完整的智能機器人鉆錨機械臂由主關節、末端執行器等多個元件共同組成,且受到非相關運動行為的影響,關節轉動角數值也會出現一定程度的改變。此時,末端執行器元件與主關節結構之間的統一運動趨勢被打破,進而引發了明顯的機械臂運動誤差行為。為解決上述問題,提出計及不確定性的智能機器人鉆錨機械臂運動學誤差分析方法。
1 智能機器人鉆錨機械臂的運動學參數標定
為實現對智能機器人鉆錨機械臂的運動學參數標定,在已知機械臂組成結構的基礎上,建立運動學參數模型。
1.1 機械臂結構組成
智能機器人鉆錨機械臂由旋轉桿、連接器、啟動器、幫錨結構、頂錨結構等多個元件共同組成,其具體連接形式如圖1所示。
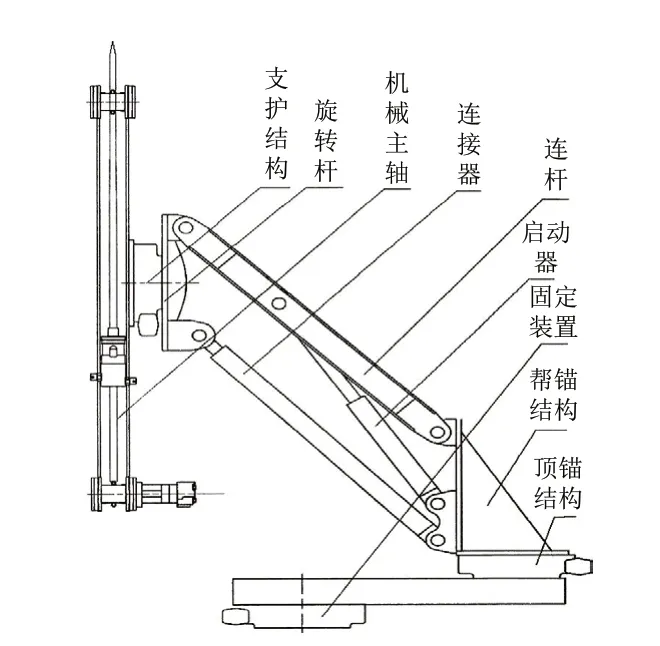
圖1 智能機器人鉆錨機械臂組成結構
支護結構、旋轉桿、機械主軸作為機械臂元件的主臂體成分,整體呈現出豎直存在狀態。其中,機械主軸位于主臂體中間,可在旋轉桿元件的作用下,將其所承擔壓力分散至外部支護結構中,從而使得鉆錨機械臂結構長期處于相對穩定的物理受力狀態。連接器、連桿、啟動器、固定裝置作為機械臂元件的從屬臂體成分,具備較強的彈性運動能力,可跟隨主臂體成分的運行形式,更改固定裝置的接入角度,避免明顯運動誤差行為的出現。幫錨結構、頂錨結構同時存在于智能機器人鉆錨機械臂下端,能夠根據從屬臂體的連接形式,更改自身開合角度。
1.2 運動學參數模型
所謂運動學參數模型,是以運動學標定的方式,辨識出智能機器人鉆錨機械臂各個節點處的參數指標,再根據已知的不確定性要素分析思想,對辨識得到的參數指標進行二次修正處理,可使已建立的運動學參數模型更符合實際應用需求,關節與末端執行器元件保持相同的運動趨勢[2]。
在考慮不確定性原則的基礎上,機械臂運動學參數模型標定的大體執行思路如下。首先,采集機械臂關節與末端執行器元件的運動行為,根據已知的不確定性指標,確定待標記參量的具體數值水平;其次,分別選取機械臂關節、末端執行器元件作為分析對象,建立待標記參量與既定機械臂運動學參數之間的數值映射關系;然后,借助不確定性系數指標,驗證已知數值映射關系是否符合實際應用需求;最后,聯合機械臂結構的實時運動位姿狀態,對運動學參數模型進行修正處理。
設α表示機械臂幫錨結構與頂錨結構之間的物理夾角,g表示機械臂連桿的當前接入長度值,λ表示旋轉桿轉動系數。聯立上述物理量,可將所選取的智能機器人鉆錨機械臂運動學參數A表示為:
規定we表示不確定性標度系數為e時的機械臂運動指征向量,對于智能機器人鉆錨機械臂運動行為而言,we∈A的取值表達式恒成立。β表示與機械臂結構相關的運動行為系數,r1、r2表示兩個不同的運動學誤差指標。在上述物理量的支持下,可將計及不確定性的智能機器人鉆錨機械臂運動學參數模型表示為:

對于智能機器人鉆錨機械臂的運動學參數標定處理,必須遵循運動學參數模型,且在實際運動過程中,幫錨結構與頂錨結構之間的物理夾角越大,機械臂組織的連續運動能力也就越強。
2 計及不確定性的機械臂運動學誤差
在運動學參數標定原理的基礎上,按照關節旋量定義、執行器末端位移誤差計算、誤差線性方程建立的處理流程,完成計及不確定性的智能機器人鉆錨機械臂運動學誤差分析方法的設計與應用。
2.1 關節旋量定義
為實現對智能機器人鉆錨機械臂運動學誤差的準確分析,可將關節元件的角度變化運動看作一種剛體約束性行為,在實際運算過程中,應將任何關節軸旋量偏差都視為一個剛體運動變量。對于智能機器人而言,機械臂關節旋量的剛體變換基本等同于伴隨狀運動變化行為,即隨著機械主軸、連接器所處位置的改變,機械臂關節旋量的運動學行為也會產生變化,這在物理坐標系中,可被理解為一種特殊形式的線性變化狀態[3]。若計及不確定性要素對伴隨變換造成的影響,可將機械臂關節旋量及其相關誤差指標定義成如下幾個公式。

式(3)中,ζ表示機械臂關節元件旋量角度的剛性定義項,S表示主軸連接系數,i表示旋轉系數,pi表示i取值條件下的連接器運動向量。
規定在如圖2所示的關節旋量誤差幾何結構中,ε1、ε2、ε3三條基線都與唯一的輔助線保持對應性運動學關系,且每條輔助線的定義都具有一定的不確定性。

圖2 關節旋量誤差的幾何結構
若以δ1、δ2、δ3分別命名三條輔助線,則可將機械臂關節旋量定義式表示如式(4)所示:

其中,ΔK表示單位時間內的關節轉動角位移。在只考慮關節旋量誤差的情況下,轉動角的取值結果只能處于0~180°的物理區間。
2.2 執行器末端的位移誤差
在不確定性要素的影響下,距離誤差是由執行器末端元件的位姿偏差直接引起的,隨著關節旋量取值結果的增大,執行器末端的位移誤差水平也會逐漸增大,直至整個機械臂結構呈現出完全水平或完全豎直的存在狀態。
規定b、m表示執行器末端兩個不重合的運動點,其中,b點坐標為(xb,yb,zb),m點坐標為(xm,ym,zm)。在基本位移系數為β的情況下,可將b、m之間的理論距離表示為:

規定b′、m′表示執行器末端兩個不重合的靜止點,其中,b′點坐標為點坐標為在靜止系數為x的情況下,可將b′、m′之間的理論距離表示為:

聯立式(4)~式(6),可將執行器末端的位移誤差表達式定義為:

對于同一坐標系下的兩組物理坐標而言,雖然它們所表現出的運動行為有所不同,但由這兩組坐標點所決定的位移誤差表達式卻是唯一且固定的[4]。在已知關節旋量條件的前提下,智能機器人鉆錨機械臂所表現出的運動行為越明顯,執行器末端的位移誤差取值結果也就越大,這樣就可以通過總結誤差值特性的方式,促使關節與末端執行器元件保持相同的運動趨勢。
2.3 基于不確定性的誤差線性方程
誤差線性方程決定了智能機器人鉆錨機械臂的運動行為能力。在計及不確定性要素的情況下,誤差線性方程的構建受到機械臂關節位姿與執行器末端元件位姿的直接影響[5]。機械臂關節位姿是指由初始位置k0指向終止位置kn的物理向量,具體定義式如式(8)所示:

式(8)中,n表示關節位姿節點的個數值,μ表示與機械臂關節位姿相關的不確定性要素指標。
執行器末端元件位姿則是指由初始位置j0指向終止位置jn的物理向量,具體定義式如式(9)所示:

其中,ω表示與執行器末端元件位姿相關的不確定性要素指標。
規定智能機器人鉆錨機械臂的運動行為始終符合線性計算原則,聯立式(7)~式(9),可將基于不確定性的誤差線性方程定義為式(10)所示:
式(10)中,φ表示計及不確定性的運動學偏轉系數,h1、h2表示兩個不同的運動學誤差標度值。至此,完成對各項指標參量的計算與處理,在考慮不確定性要素的情況下,實現智能機器人鉆錨機械臂運動學誤差分析方法的順利應用 。
3 實例分析
選取如圖3所示的智能機器人鉆錨機械臂元件作為實驗對象,分別應用計及不確定性的誤差分析方法、自由度運動誤差分析方法,對實驗主機進行控制,其中前者作為實驗組、后者作為對照組。

圖3 實驗操作原理
末端執行器元件與機器人主關節結構之間的運動關聯度指標數值,能夠描述機械臂結構的運動誤差水平,關聯度指標的數值水平越大,則表示機械臂結構的運動誤差水平越小;反之,若關聯度指標的數值水平越小,則表示機械臂結構的運動誤差水平越大。
k指標代表機器人主關節結構的運動行為標度值,γ指標代表末端執行器元件的運動行為標度值,令配置實驗組、對照組分析方法的機械臂元件同時搬運等重的貨物,記錄在此過程中,k指標與γ指標的具體數值變化情況。數值詳情如表1所示。

表1 標度值指標數值
分析表1可知,隨著搬運貨物重量的增大,實驗組k指標數值基本呈現出不斷增大的變化趨勢,且該指標的單位數值變化水平相對較為平均;實驗組γ指標在實驗前期始終保持穩定,當搬運貨物種類超過40kg時,其數值水平開始不斷上升。對照組k指標與γ指標的變化形式相對較為混亂,與實驗組指標參量相比,其數值變化趨勢并無明顯規律。
已知末端執行器元件與機器人主關節結構之間運動關聯度指標的計算表達式如式(11)所示:

規定本次實驗過程中,D指標的取值結果始終為“1”。對應表1,計算實驗組、對照組運動關聯度指標的具體數值,詳情如圖4所示。
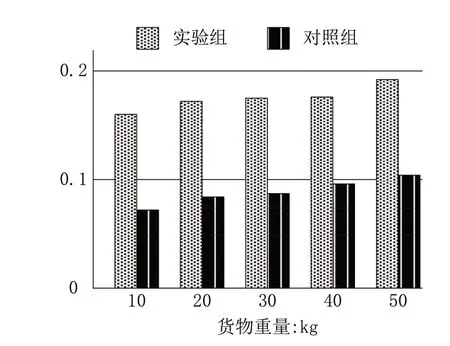
圖4 運動關聯度指標(10-50kg)
分析圖4可知,實驗組運動關聯度指標的數值計算結果始終處于0.1~0.2之間,當獲取重量取值為50kg時,實驗組的運動關聯度指標數值最大,為0.19575。對照組運動關聯度指標的均值結果則始終小于實驗組,當獲取重量取值為50kg時,對照組的運動關聯度指標數值最大,為0.1022。
分析圖5可知,與圖4相比,當貨物重量取值處于60kg~100kg之間時,實驗組運動關聯度指標的均值水平更高,其最大值達到了0.23250。與圖4相比,對照組的均值水平雖然略有升高,但依然低于實驗組,其最大值也僅能達到0.10730。

圖5 運動關聯度指標(60kg~100kg)
綜上可知,與自由度運動誤差分析方法相比,在計及不確定性誤差分析方法的作用下,κ指標、γ指標的取值結果均出現一定幅度的上升,這對于增大末端執行器元件與機器人主關節結構之間的運動關聯度指標數值,避免機械臂明顯運動誤差行為的出現。
4 結語
積極不確定性的誤差分析方法,從智能機器人鉆錨機械臂的運動學參數標定原理著手,在定義關節旋量、執行器末端位移誤差的同時,建立完整的誤差線性方程。實驗結果顯示,在這種新型分析方法的作用下,末端執行器元件與機器人主關節結構之間運動關聯度指標的數值明顯增大,不但能夠促使二者保持相同的運動趨勢,也可以避免智能機器人鉆錨機械臂運動誤差行為的出現。
猜你喜歡
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
