S1306工作面開采沉陷“天-地”協同監測方案研究
2022-08-31 07:32:10張曉巖
煤 2022年9期
張曉巖,路 鑫
(潞安化工集團有限公司 古城煤礦,山西 長治 046000)
古城煤礦自投產至今,全面的地表沉陷監測數據相對缺乏,工作面開采所引起的地表變形規律不夠明確,對厚煤層綜放開采條件下地面沉陷機理的研究不夠深入,從而導致適用于本礦區的地表移動角值參數及開采沉陷預計參數尚不完備。高精度的地面水準和位移監測是研究地表移動變形規律的重要手段,但傳統的“十字線”地表移動觀測站只能獲取主斷面上的“點狀”信息,不能完全反映整個盆地的移動變形特征,導致所求取的角量參數具有不確定性。
本文以古城煤礦S1306工作面為觀測工作面,對地表沉陷“天-地”(“天”指無人機低空雷達測量;“地”指傳統地面測量)協同監測的技術方案進行設計,以獲取高精度、面狀的地表變形信息。研究成果可為后續沉陷規律研究和預計參數反演提供數據基礎,亦對指導保護煤柱留設和“三下”壓煤開采、對礦區生態修復及環境后評價[1-3]。
1 工程概況
S1306工作面位于古城煤礦南部一采區,地勢平坦,地表多為農田;周邊村莊和公路較多,東以常廟線農村公路為界,南臨西酪余村,西側有王史村,北臨東李高村。工作面走向長約2 100 m,傾向寬約360 m,煤層平均厚度6.15 m,傾角約為5°,平均采深536 m;松散層厚度約90 m.綜合放頂煤開采,全部垮落法管理頂板。工作面井上下對照情況如圖1所示。
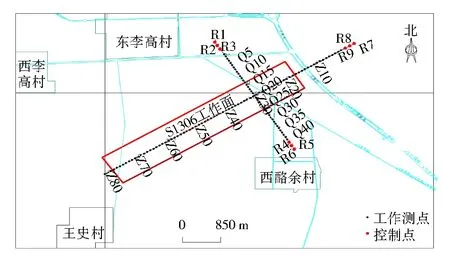
圖1 S1306工作面井上下對照圖及測點布置圖
2 地表巖移觀測方案
2.1 地表巖移觀測站設計
2.1.1 設計參數選取
根據礦區生產資料,結合本礦S1306工作面具體情況,并參考周邊煤礦(五陽煤礦)的地表實測沉陷參數,選取S1306工作面巖移觀測站的設計參數如表1所示。
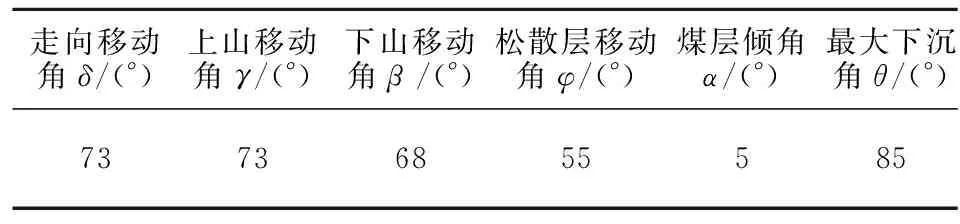
表1 S1306工作面地表移動觀測站設計參數
為確保觀測線沿煤柱一側的邊界不受開采影響,觀測線應有足夠的長度。因此,按煤礦測量規程取各種移動角的調整值:Δγ=Δβ=Δδ=20°.
2.1.2 觀測站位置設計
1) 傾向觀測線位置設計。為保證傾向觀測線通過充分采動區,觀測線到開切眼的距離D必須滿足公式(1)[4]:
D≥(H0-h)cot(δ-Δδ)+hcotφ
(1)
式中:H0為工作面平均采深;h為松散層厚度,取90 m;δ為走向移動角;Δδ為走向移動角修正值;φ為松散層移動角。
經計算得:D≥399 m,即傾向觀測線與開切眼的距離必須大于399 m.
2) 走向觀測線位置設計。S1306工作面煤層傾角α=5°,為盡可能保證走向觀測線通過最大下沉點,走向觀測線應從工作面中間向下山方向偏移。根據五陽煤礦實測最大下沉角,S1306工作面下山方向偏移量P應滿足公式(2):
P=(H0-h)cotθ
(2)
式中:H0為回采工作面平均開采深度;h為松散層厚度;θ為最大下沉角。
將參數值帶入公式(2)計算得:P=39 m.此外,由于S1306工作面傾向寬360 m<1.4H0,傾向方向未達到充分采動,所以走向觀測線設置為一條。
2.1.3 觀測線長度設計
1) 傾向觀測線長度設計。傾向觀測線長度必須保證覆蓋上山盆地半長、下山盆地半長和工作面的寬度,并有一定的安全距離,因回采工作面傾向方向未達到充分采動,所以布置整條觀測線,傾向觀測線最小長度可按公式(3)計算[5]:
L傾向=2hcotφ+(H1-h)cot(β-Δβ)+(H2-h)cot(γ-Δγ)+Lcosα
(3)
式中:φ為松散層移動角;H1、H2分別為上、下山方向采深;Lcosα為工作面水平投影寬度;其它符號含義與前述相同。
經計算,得到傾向觀測線長度約為1 224 m.從與走向觀測線交叉點開始,上山方向長度約為640 m,下山方向長度為584 m.
2) 走向觀測線長度設計走向觀測線要保證停采線方向延伸出沉陷盆地邊界范圍之外,工作面之內要測到最大下沉點,全長走向觀測線長度可用公式(4)計算[5]:
L走向=2hcotφ+2(H0-h)cot(δ-Δδ)+l1
(4)
式中:h為松散層厚度;φ為松散層移動角;H0為平均采深;δ和Δδ分別為走向移動角及其修改值;l1為工作面走向長度。
經計算得到,走向觀測線長度約為2 898 m,其中,工作面外側約782 m,工作面內側約2 111 m.
2.1.4 觀測點數目及密度的確定
觀測線上的測點數目及其密度,主要取決于開采深度和設站的目的。根據《煤礦測量規程》,采深大于400 m時,測點間距為35 m;控制點間距為50 m.經計算,需布置工作測點120個,傾向觀測線上布置40個測點,走向觀測線上布置80個測點;其中,控制點9個(走向3個,傾向6個)。測點具體位置如圖1所示。
2.2 觀測內容
地表移動觀測站的觀測工作主要包括:連接測量、全面觀測、日常觀測等。具體如下:
2.2.1 連接測量
與測區內已知控制點進行連測,以獲得觀測站控制點的平面位置和高程。在觀測點埋好10~15 d、點位固結之后,獨立進行兩次,點位中誤差需小于7 cm,高程測量按三等水準的精度要求進行。
2.2.2 全面測量
全面觀測是確定各測點的初始位置和高程。需連接測量后、地表開始移動之前,獨立進行兩次全面觀測,兩次觀測時間間隔小于5 d.兩次觀測的同一點高程差小于10 mm,同一邊的長度差不大于4 mm時,取平均值作為觀測站的原始觀測數據(又稱初次觀測)。
2.2.3 日常觀測
日常觀測工作,指的是首次和末次全面觀測之間適當增加的水準測量工作。在回采工作面推進0.2~0.5H0后,每隔4~5 d進行一次水準測量。在移動過程中,視地表下沉速度, 1~3個月觀測一次。實測按四等水準測量的精度要求進行。
觀測站的各項觀測,如表2所示。
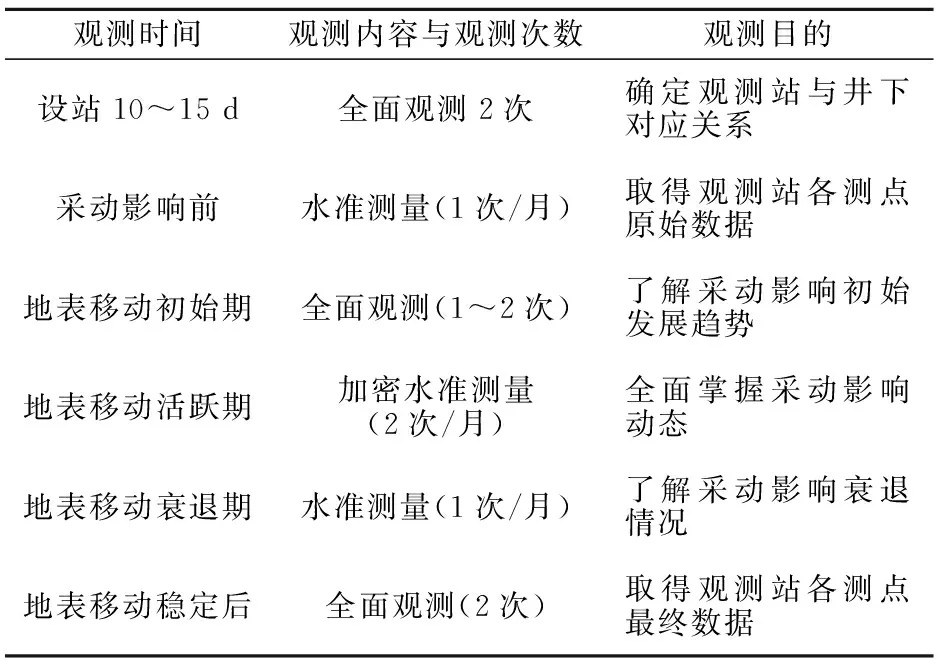
表2 觀測站觀測程序
3 無人機激光雷達監測方案設計
無人機(unmanned aerial vehicle,UAV)激光雷達監測原理與地面三維激光掃描原理相同,是以無人機作為觀測平臺,對同一位置地表在不同時段進行兩次掃描,獲得兩個時刻地表的數字高程模型(Digital Elevation Model, DEM),用兩期DEM相減,可以得到監測區域的地表的實測下沉值,同時根據動態求參原理,獲得地表移動變形參數[6]。其原理如圖2所示。
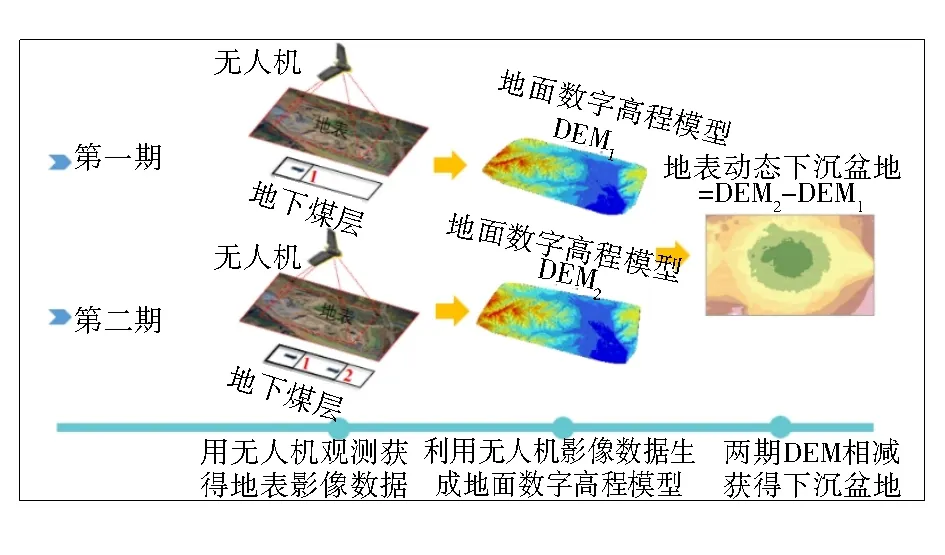
圖2 UAV-Lidar沉陷盆地獲取原理圖[6]
無人機飛行平臺擬選擇大疆M600Pro;激光雷達選擇智喙ARS-450i激光測量系統,它集成高精度激光掃描儀(測距精度5 mm)、GPS、IMU等傳感器,可獲取三維激光點云和定位定姿數據;通過配備的數據處理和應用軟件,可以快速生成DEM,制作3D模型。
3.1 飛行范圍確定
工作面開采引起地表沉降的范圍即為無人機激光雷達測區飛行范圍。利用測區地質資料及相關參數,結合收集的采掘工程平面圖、井上下對照圖等,規劃無人機地表監測范圍為3 761 m×1 623 m,約6.1 km2.
3.2 飛行參數設置
飛行參數主要有重疊度、飛行高度。根據攝影測量規范,并結合工作面的地形條件和精度要求,設計航向重疊率和旁向重疊率為均30%.地面分辨率設置為6 cm,利用相機的焦距(15 mm)和像元尺寸,得到本次項目設計的相對飛行高度為65 m.S1306工作面無人機激光雷達設計航線如圖3所示[7-9]。
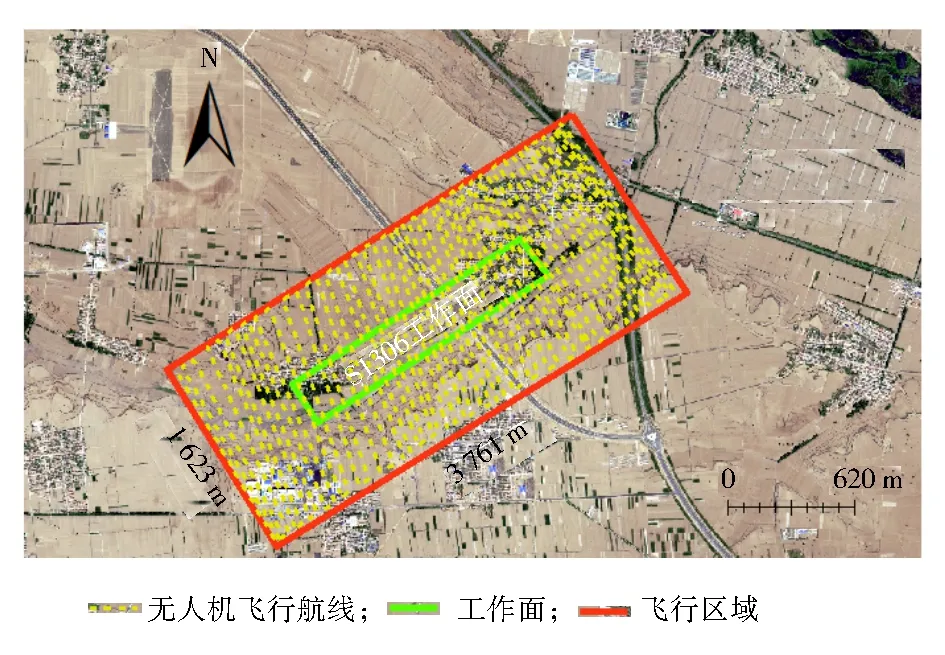
圖3 古城煤礦S1306工作面無人機激光雷達飛行范圍及航線
3.3 數據后處理
無人機外業結束后的數據后處理主要包括:POS解算、點云融合、點云濾波和DEM構建等內容,分述如下:
3.3.1 POS解算
主要是用基站收集的GNSS靜態數據和POS數據(移動站GNSS數據+IMU數據+里程計數據)組合解算,以輸出后期數據出來所需的高精度定位定姿數據[8]。
3.3.2 點云融合及精度驗證
點云融合是將機載激光雷達系統采集到的原始數據進行融合處理,生成平面坐標的點云文件,以進行后續的點云濾波及DEM構建。進行精度驗證,可保證點云數據的真實可用性。
3.3.3 點云濾波
其目的是提出三維點云數據中的非地面點,如植被點、建筑物點、車輛點、橋梁點和電力線點等,以構建生成DEM。目前主流的點云濾波算法有不規則三角網漸進加密、分層穩健線性內插、漸進窗口數學形態學濾波、基于坡度的濾波方法等。
3.3.4 構建DEM
利用前期處理得到的優質點云數據,采用規則格網或不規則三角網進行測區DEM的構建;兩期DEM相減即得到測區下沉盆地。
4 結 語
1) 本文通過設計觀測線位置、長度、數量,以及觀測方法等內容,建立了完整且可靠的傳統地表巖移觀測站,有利于后續獲取各種巖移參數,總結研究區地表的移動變形規律。
2) UAV激光雷達監測地表沉陷有重量輕、攜帶方便、成果處理效率高的優點,因此為了更全面地研究地表沉陷規律,本文詳細設計了UAV激光雷達監測方案,包括無人機飛行范圍劃定、飛行參數設置、實測步驟介紹以及最后數據處理流程等內容,其中后期數據處理的精確與否是獲得巖移規律和巖移參數的關鍵。
3) 監測礦區地表沉陷有多種方法,除了上述兩種之外,仍可以考慮利用InSAR大規模監測不同時間跨度的地表沉陷情況。關于綜合運用“空-天-地”三種監測技術來獲取巖移規律和地表移動參數,也是未來開采沉陷領域的重要趨勢。