基于CAN-FD的全電子通信單元設計
2022-08-27 02:11:34孟雅婷梁玉琦
鐵路通信信號工程技術(shù) 2022年8期
關(guān)鍵詞:安全性結(jié)構(gòu)
孟雅婷,梁玉琦
(蘭州交通大學光電技術(shù)與智能控制教育部重點實驗室,蘭州 730070)
1 概述
隨著全電子計算機聯(lián)鎖單元的出現(xiàn),傳統(tǒng)安全型繼電器聯(lián)鎖的使用逐漸減少[1]。全電子執(zhí)行單元在全電子計算機聯(lián)鎖系統(tǒng)中實現(xiàn)傳統(tǒng)6502電氣集中聯(lián)鎖系統(tǒng)中執(zhí)行組電路的功能,主要工作是對現(xiàn)場設備的控制和信息采集,其中提供的通信接口也可實現(xiàn)與計算機聯(lián)鎖系統(tǒng)和鄰站之間的通信。目前存在的電子通信單元大多數(shù)采用可實時控制的串行通信網(wǎng)絡控制器區(qū)域網(wǎng)總線(Controller Area Network,CAN),它具有實時性高、開發(fā)周期短等特點。隨著現(xiàn)場對信號快速且穩(wěn)定傳輸?shù)囊笤絹碓礁撸勺兯俾实目刂破鲄^(qū)域網(wǎng)總線(Controller Area Network With Flexible Data-Rate,CAN-FD)進入大眾視野。它在繼承CAN總線優(yōu)點的同時,具備更高的傳輸速率和更長的報文有效數(shù)據(jù)。本文所設計的全電子通信單元對系統(tǒng)響應時間、總線負載和共因失效3方面進行了改善。
2 CAN-FD簡介
CAN在實際應用中的傳輸速率小于1 Mbit/s,在數(shù)據(jù)傳輸需求越來越高的今天,CAN的不足越來越明顯。Bosch在2011年發(fā)布CAN-FD,它不僅擁有CAN分布式實時監(jiān)控、雙線串行通訊協(xié)議、有效避免總線沖突和抗電磁干擾能力強等方面的優(yōu)勢,而且對網(wǎng)絡通信帶寬、傳輸速度和錯誤幀漏檢等方面做出改進。
2.1 CAN-FD的傳輸速率
CAN-FD和CAN的仲裁比特率相同,為最高1 Mbit/s,但數(shù)據(jù)比特率最高可達到8 Mbit/s,甚至更高。如圖1所示,仲裁階段和數(shù)據(jù)控制階段的波特率為1 Mbit/s,但中間的數(shù)據(jù)傳輸階段的波特率是可變的。

圖1 可變速率示意Fig.1 Variable rate diagram
2.2 CAN-FD的有效數(shù)據(jù)場
CAN報文的有效數(shù)據(jù)場字節(jié)數(shù)為8,CAN-FD在此基礎上進行擴充,最大可達到64個字節(jié)。當數(shù)據(jù)長度碼DLC小于或等于7時,CAN-FD與CAN數(shù)據(jù)場情況一致,當DLC大于或等于8時,有一個非線性增長[2]。CAN和CAN-FD數(shù)據(jù)場對比如圖2所示,對于無鑰匙進入及啟動系統(tǒng)(Passive Entry Passive Start,PEPS),模塊的身份認證只需要一條報文即可完成。
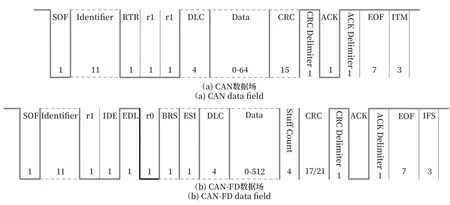
圖2 CAN和CAN-FD數(shù)據(jù)場對比Fig.2 Comparison between CAN and CAN-FD data fields
2.3 CAN-FD的CRC校驗場
傳統(tǒng)CAN保持通信同步的方式會造成循環(huán)冗余校驗碼的干擾,CAN-FD在此基礎上進行優(yōu)化,從之前的15位擴展到21位。CAN-FD的循環(huán)冗余校驗(Cyclic Redundancy Check, CRC)包括整個數(shù)據(jù)段和幀起始位的奇偶校驗保護位和填充位。對CRC的計算結(jié)果進行比較后,判斷是否可以正常接收。
2.4 CAN-FD的控制場
CAN-FD幀報文的控制場中增加了擴展數(shù)據(jù)長度位(Extended Data Length,EDL),比特率開關(guān)位(Bit Rate Switch,BRS)和錯誤狀態(tài)指示位(Error State Indicator,ESI)。EDL位實現(xiàn)CAN數(shù)據(jù)幀中保留位r的功能,即隱性為CAN-FD報文,顯性為CAN報文;BRS位實現(xiàn)位速率轉(zhuǎn)換,即隱性表示可變速率,顯性表示不轉(zhuǎn)換速率;ESI位可以快捷的知曉當前發(fā)送節(jié)點的狀態(tài)。
3 全電子執(zhí)行單元
基于二乘二取二的全電子計算機聯(lián)鎖系統(tǒng)已經(jīng)投入使用,其具有過流保護功能,實現(xiàn)了信號的控制、監(jiān)測、監(jiān)督一體化[3],且運行穩(wěn)定、可靠。全電子執(zhí)行系統(tǒng)實現(xiàn)“二取二”邏輯控制和閉環(huán)檢測,通過雙路冗余CAN總線執(zhí)行單元控制現(xiàn)場設備,配合地面安全平臺滿足應用場景的需要。作為執(zhí)行機構(gòu),電子執(zhí)行單元可以根據(jù)實際應用需求,配置不同的模塊以適應現(xiàn)場的情況[4]。各個執(zhí)行單元的硬件設計大多相似,均采用“二取二”結(jié)構(gòu)。執(zhí)行模塊主要由微控制器、通信電路、采集電路和其他輔助電路組成。
全電子計算機聯(lián)鎖系統(tǒng)在安全性、可靠性和實時性上的要求都十分高,其中安全性必須達到SIL4認證[5]。全電子執(zhí)行單元作為負責現(xiàn)場控制和采集的重要一環(huán),它的安全性和可靠性對整個聯(lián)鎖系統(tǒng)的意義重大。SIL4低操作模式下的平均失效概率范圍為10-5~10-4,高操作模式或連續(xù)操作模式下的平均失效概率范圍為10-9~10-8。
4 二取二安全冗余
冗余結(jié)構(gòu)已經(jīng)在信息通信系統(tǒng)中廣泛應用。冗余就是在某些部件或功能上進行必要的重復配置,以達到安全性和可靠性的提升。冗余結(jié)構(gòu)已經(jīng)被視為鐵路行業(yè)權(quán)衡計算機聯(lián)鎖系統(tǒng)的重要標準。常見的冗余結(jié)構(gòu)有雙機熱備冗余、二取二冗余和二者結(jié)合的二乘二取二冗余[6]。
4.1 雙機熱備冗余
雙機熱備指兩臺微控制單元(Micro Controller Unit,MCU)相互備份,完成相同的工作。如圖3所示,MCU A和MCU B同時進行邏輯運算,但是只有一臺設備向外傳輸指令。當系統(tǒng)開始工作時,其中一臺MCU開始正常工作,另一臺處于待機狀態(tài),一旦正常工作的MCU出現(xiàn)故障,另一臺開始運行,完成相同的工作,即故障檢查、邏輯運算和傳輸指令。雙機熱備冗余需要硬件和軟件配合才能實現(xiàn)兩系之間的自動切換,是技術(shù)層面上實現(xiàn)可靠性較難的一種冗余防止方式[7]。

圖3 雙機冗余結(jié)構(gòu)Fig.3 Dual redundancy structure
4.2 二取二冗余
“二取二”是十分典型的冗余結(jié)構(gòu),常用來實現(xiàn)故障-安全機制。MCU A和MCU B分別進行邏輯運算,只有當兩部分運算結(jié)果相同時才能輸出指令,是一種安全性較強的結(jié)構(gòu),如圖4所示。

圖4 二取二冗余結(jié)構(gòu)Fig.4 2 out of 2 redundancy structure
二取二冗余結(jié)構(gòu)與雙機熱備冗余結(jié)構(gòu)最大的區(qū)別是冗余目的。前者是為避免錯誤地執(zhí)行指令,優(yōu)先保證系統(tǒng)的安全性;后者的主、備兩系提高了系統(tǒng)的可靠性,避免正在運行的MCU出現(xiàn)故障時的宕機狀態(tài)。二取二邏輯主要通過與門和異或門實現(xiàn),如圖5所示。
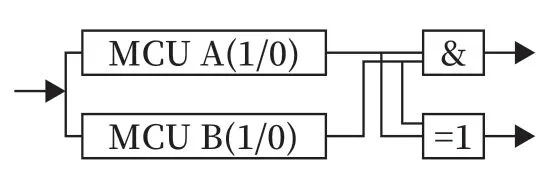
圖5 二取二冗余結(jié)構(gòu)邏輯示意Fig.5 2 out of 2 redundancy structure logic diagram
在每個冗余結(jié)構(gòu)的基本單位相同的前提下,設1個基本單位的失效率為λ,如圖6所示,雙機熱備冗余結(jié)構(gòu)的可靠度為y1=2e-λt-e-2λt,二取二冗余結(jié)構(gòu)的可靠度為y2=e-2λt;設基本單元的危險失效率是λD,如圖7所示,雙機熱備結(jié)構(gòu)的安全度為y1=e-2λDt,二取二冗余結(jié)構(gòu)的安全度為y2=2e-λDt-e-2λDt。從圖 6、7中可以看出,冗余結(jié)構(gòu)的安全性和可靠性是此增彼減的[8]。

圖6 兩種冗余結(jié)構(gòu)的可靠性對比Fig.6 Reliability comparison of two redundancy structures

圖7 兩種冗余結(jié)構(gòu)的安全性對比Fig.7 Safety comparison of two redundancy structures
5 全電子通信單元
本文設計的是全電子執(zhí)行單元中的通信電路部分,主要實現(xiàn)功能包括與聯(lián)鎖機的交互、“二取二”邏輯、MCU之間的通信和鄰站間的互通。
當正在工作的設備發(fā)生故障,雙機熱備冗余結(jié)構(gòu)需要一定的故障容錯時間和設備轉(zhuǎn)換時間,會造成系統(tǒng)響應時間加長,甚至輸出錯誤指令,可靠性有所提升的同時降低了安全性。當所有數(shù)據(jù)集中在同一條總線上時,負載翻倍,系統(tǒng)的穩(wěn)定性也有所降低。在保證系統(tǒng)的安全性且增強系統(tǒng)可靠性的前提下,本文設計的全電子通信單元采用“二取二”冗余結(jié)構(gòu)。傳統(tǒng)的總線大部分采用CAN總線,其傳輸速率越來越不能滿足現(xiàn)場的需求,而且容易產(chǎn)生“丟包”“漏包”的情況,傳輸速率更高和報文有效數(shù)據(jù)長度更長的CAN-FD越來越頻繁的應用到各個領域。
如圖8所示,在該結(jié)構(gòu)中,由兩路MCU實現(xiàn)“二取二”安全邏輯,第三路MCU分別于兩路MCU和鄰站通信接口電路相連接,實現(xiàn)“二取二”比較、與鄰站間的通信以及與聯(lián)鎖機的交互。兩路CAN-FD總線以冗余方式與聯(lián)鎖機通信,第三路CAN-FD起到監(jiān)測作用。

圖8 全電子通信單元結(jié)構(gòu)Fig.8 Full electronic communication unit structure
聯(lián)鎖機以冗余的方式與兩條CAN-FD連接,重復的配置可以起到提高安全性和可靠性的目的。為減少總線負載壓力,主體部分新增MCU C,用來接收MCU A和MCU B“二取二”結(jié)果進而進行比較。MCU A和MCU B分別進行邏輯運算,將結(jié)果發(fā)送到MCU C中,只有在MCU A和MCU B中的運算結(jié)果一致時,MCU C才能傳輸指令。為防止共因失效,MCU A和MCU B應該采取不同型號的芯片。
車站信號設備包括信號機、軌道電路、道岔和零散電路。信號機狀態(tài)由信號控制模塊監(jiān)督。根據(jù)相關(guān)設備的狀態(tài)來控制信號機的點亮和熄滅,并采集相關(guān)狀態(tài)信息進行傳輸。軌道電路的作用是檢測列車的運行位置和傳輸行車信息,具體可以明確列車位置、檢測出清及占用和顯示地面有關(guān)信息。道岔有“定位”“反位”和“四開”三種形態(tài),與轉(zhuǎn)轍機密切相關(guān)。主要工作是控制轉(zhuǎn)轍機動作和采集轉(zhuǎn)轍機位置。零散模塊對零散電路進行控制,實現(xiàn)斷路器報警、電源監(jiān)督等功能。
6 總結(jié)
本文設計的全電子通信單元采用CAN-FD,提升了傳輸速率,改進的“二取二”冗余結(jié)構(gòu)在保證系統(tǒng)安全性的前提下,增強系統(tǒng)可靠性,減緩總線的負載壓力,實現(xiàn)控制監(jiān)測一體化,為鐵路信號設備的升級提供基礎。
猜你喜歡
現(xiàn)代儀器與醫(yī)療(2022年2期)2022-08-11 09:51:40
建材發(fā)展導向(2021年14期)2021-08-23 00:57:04
哲學評論(2021年2期)2021-08-22 01:53:34
建材發(fā)展導向(2021年23期)2021-03-08 01:05:44
中華養(yǎng)生保健(2020年5期)2020-11-16 01:44:32
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
信息安全與通信保密(2016年3期)2016-08-23 01:23:46
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50