JSDXC2-1700型動態繼電器的故障探究及改進
2022-08-27 02:11:42許鴻飛
鐵路通信信號工程技術 2022年8期
關鍵詞:信號
王 俊,劉 偉,許鴻飛
(1.中國鐵路上海局集團有限公司南京電務段,南京 210011;2.北京全路通信信號研究設計院集團有限公司,北京 100070)
駝峰控制系統對駝峰調車進路(DXJ)、道岔的鎖閉繼電器(SJ)、場聯的關鍵繼電器采用動態輸出驅動的方式進行控制,部分站場選用JSDXC2-1700型動態繼電器。
2018年7月26日,中國鐵路上海局集團有限公司(簡稱上海局)蕪湖東駝峰場遭遇雷擊后,現場使用的JSDXC2-1700型動態繼電器在計算機聯鎖沒有驅動的情況下直接吸起,系統報警控表不一致后,切斷計算機輸出電源,繼電器仍無法落下,引起故障報警。
1 JSDXC2-1700型動態繼電器工作原理
JSDXC2-1700 型動態繼電器原理如圖1所示。該繼電器包含雙路功能電路的動態驅動電路板部分和繼電器負載部分,雙路功能電路分別對應計算機控制系統的A、B機使用,兩路原理完全相同,兩光可控硅控制的繼電器負載工作電源部分共用,動態驅動電路板的輸入電源分別為計算機控制系統控制信號、繼電器工作電源,其負載為繼電器線圈如圖1中的J所示。
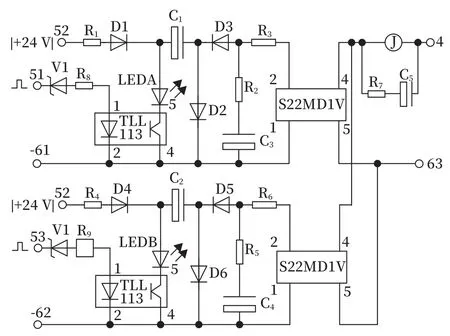
圖1 JSDXC2-1700 型動態繼電器原理Fig.1 Schematic diagram of JSDXC2-1700 dynamic relay
以其中一路繼電器電路為例,詳述繼電器工作原理:動態繼電器正常工作時需要3個輸入信號,分別是DC24 V,DC24 V、1 Hz方波信號和AC24V:DC24V為計算機控制系統開關電源;計算機控制系統輸出的控制電源為DC24 V、1 Hz方波信號,其低電平為0 V,高電平為24 V;AC 24 V為電源屏提供動態繼電器的負載線圈的工作電源。當需要繼電器吸起時,計算機控制系統向繼電器輸入方波信號,繼電器吸起;當3個電源中任一條件不滿足時,繼電器落下。
圖1中,4 和63 端子輸入的 AC24 V為動態繼電器的負載部分繼電器線圈的工作電源,電源的導通受到動態驅動電路中S22MD1V光可控硅輸出側控制。52、61端子輸入 DC24 V,51和 61端子輸入 DC24 V、1 Hz方波信號,61端子為DC24 V的公共負極。計算機控制系統工作,對動態繼電器輸入穩定DC24 V、1 Hz方波信號,當方波信號處于低電平時,TLL113光耦處于截止狀態,電容C1充電;當方波信號處于高電平時,TLL113光耦導通,C1通過光耦放電,導通光可控硅S22MD1V,同時給C3充電。當方波信號再次處于低電平,TLL113光耦截止,電容 C1充電時,電容 C3向光可控硅S22MD1V放電維持其導通,如此反復保持S22MD1V光可控硅的導通。S22MD1V光可控硅的輸出側的AC 24V被調整為正半波信號,維持動態繼電器的負載部分繼電器的吸起。
計算機控制系統切斷輸出DC24 V、1 Hz方波信號后,TLL113光耦截止,C1不再導通光可控硅S22MD1V工作。當C3放電結束后,S22MD1V光可控硅關斷,實現繼電器延時落下。
2 故障原因探究
對故障的JSDXC2-1700型動態繼電器進行電氣特性測試,繼電器線圈部分工作值與釋放值均符合產品標準規定。測試動態特性時,切斷DC24 V時繼電器斷電不落下,初步判斷JSDXC2-1700型動態繼電器內的動態驅動電路板上的S22MD1V光可控硅芯片因雷擊而損壞。
對發生故障的JSDXC2-1700型繼電器進行如下測試。
1)先進行繼電器工作交流電源測試,測試時僅對繼電器4、63端施加AC24 V信號,繼電器吸起。
2)分別取下其中一路S22MD1V光可控硅芯片對繼電器進行測試,當第一路光可控硅芯片單獨工作時造成繼電器不釋放,而使用第二路光可控硅芯片單獨工作時繼電器工作正常。
3)用萬用表初步測試故障芯片引腳電阻等參數,并與完好芯片對比,無異常。
4)分別測試兩塊光可控硅開啟電流。根據光可控硅的結構原理,S22MD1V內部結構如圖2所示。其開啟電流測試方法為:5、4 腳串入電阻接入DC7 V電壓,保證在電路導通的情況下發光二極管可以點亮,1、2 腳從0開始加電,直到發光二極管點亮,需要的電流即為開啟電流。經現場測試兩塊芯片開啟電流均在0.5 mA左右,無異常,符合技術指標規定。

圖2 S22MD1V光可控硅內部結構Fig.2 Internal structure diagram of S22MD1V silicon-controlled rectifier
5)對故障光可控硅芯片單獨測試。輸入端不加電,僅對輸出端5、4腳施加直流電,從0開始逐漸升高,當電壓達到28 V時,發光二極管點亮。測試電路如圖3所示。
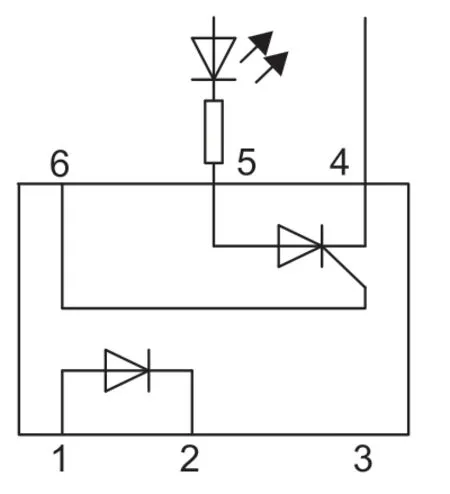
圖3 S22MD1V型光可控硅漏流測試Fig.3 Leakage current test of S22MD1V silicon-controlled rectifier
6)對完好芯片單獨測試。輸入端不加電,僅對輸出端 5、4 腳施加直流電,從0開始逐漸升高,漏流始終保持 0.2 μA,電壓達到55 V時,發光二極管不亮。根據以上測試結果,該繼電器故障原因為其中一路S22MD1V光可控硅芯片內部損壞。當輸入端電信號切斷時,交流信號無法對光可控硅輸出端進行切斷,造成芯片輸出端一直處于導通狀態,繼電器不能可靠釋放。
3 JSDXC2-1700型動態繼電器的驅動電路的改進
分析JSDXC2-1700型動態繼電器的動態電路板上的S22MD1V光可控硅芯片損壞后,導致當輸入端微機輸出電信號切斷時,無法切斷光可控硅輸出端繼電器工作電源,造成繼電器錯誤勵磁。因此必須對繼電器的驅動進行改進。
考慮到動態驅動繼電器與外部的接口條件,既要保證對既有的計算機聯鎖軟件不做大的修改,同時要減少外部配線的施工工作量,借鑒目前現場選用的DS6-DTH2-TW動態驅動盒+偏極繼電器的方式來實現相關繼電器的動態驅動輸出的驅動電路。在既有工程中實際應用的DS6-DTH2-TW動態驅動盒技術基礎上,對JSDXC2-1700型動態繼電器的動態驅動電路板進行適配性修改,改進方法如下。
1)采用目前在用的DS6-DTH2-TW駝峰動態驅動盒中動態驅動電路四路輸出的其中一路,替代JSDXC2-1700型動態繼電器中的動態驅動電路。
2)為直接替代既有在軌運行的JSDXC2-1700型動態繼電器,將在用的DS6-DTH2-TW駝峰動態驅動盒的繼電器負載工作電源的電源輸入DC25 V修改為AC24 V。同時將駝峰控制系統微機輸出的頻率由5 Hz方波信號(DC24 V)修改為1 Hz方波信號(DC24 V)。改進后的JSDXC2-1700型動態繼電器電路原理如圖4所示。
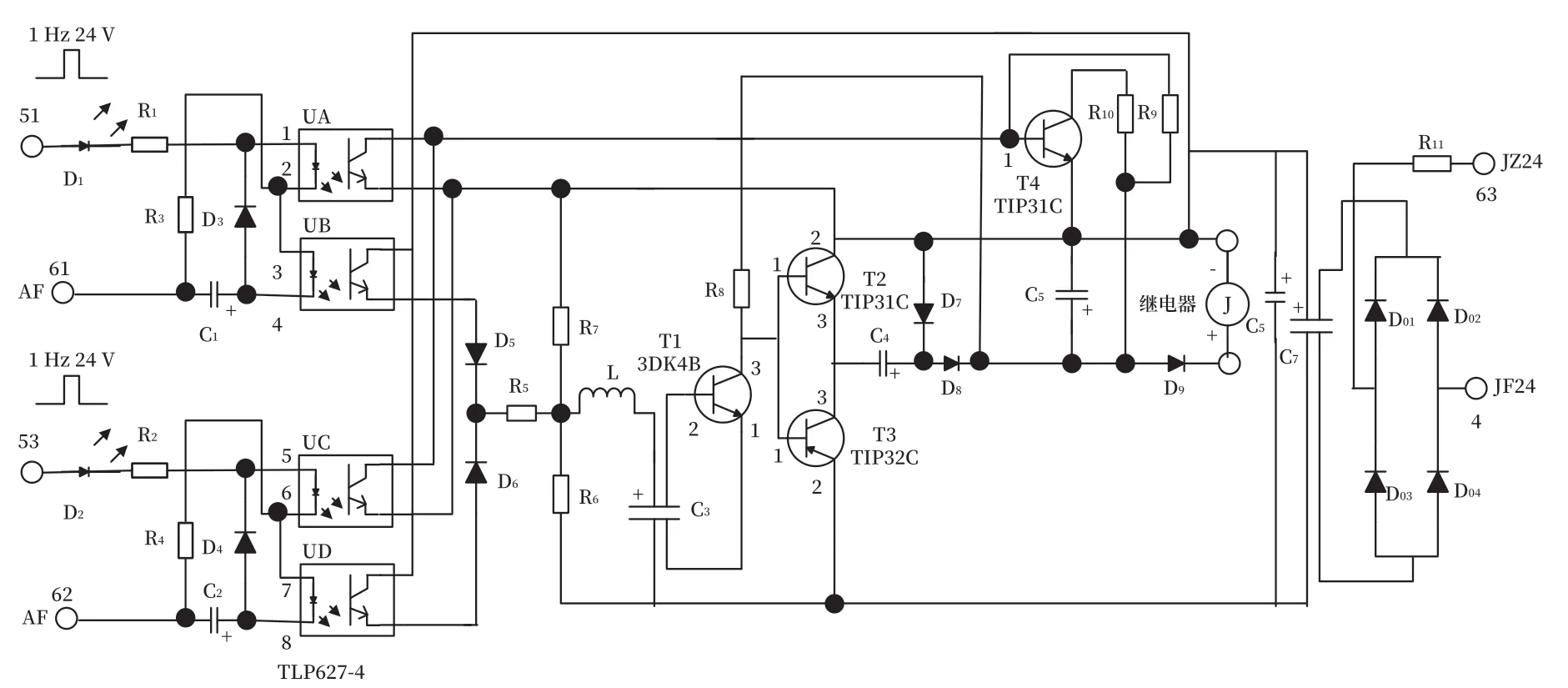
圖4 JSDXC2-1700型動態繼電器改進電路原理Fig.4 Schematic diagram of improved circuit of JSDXC2-1700 dynamic relay
3)改進后的JSDXC2-1700型動態繼電器的驅動電路板部分借鑒了DS6-DTH2-TW動態驅動單元盒,兩者之間的主要區別技術對比如表1所示。
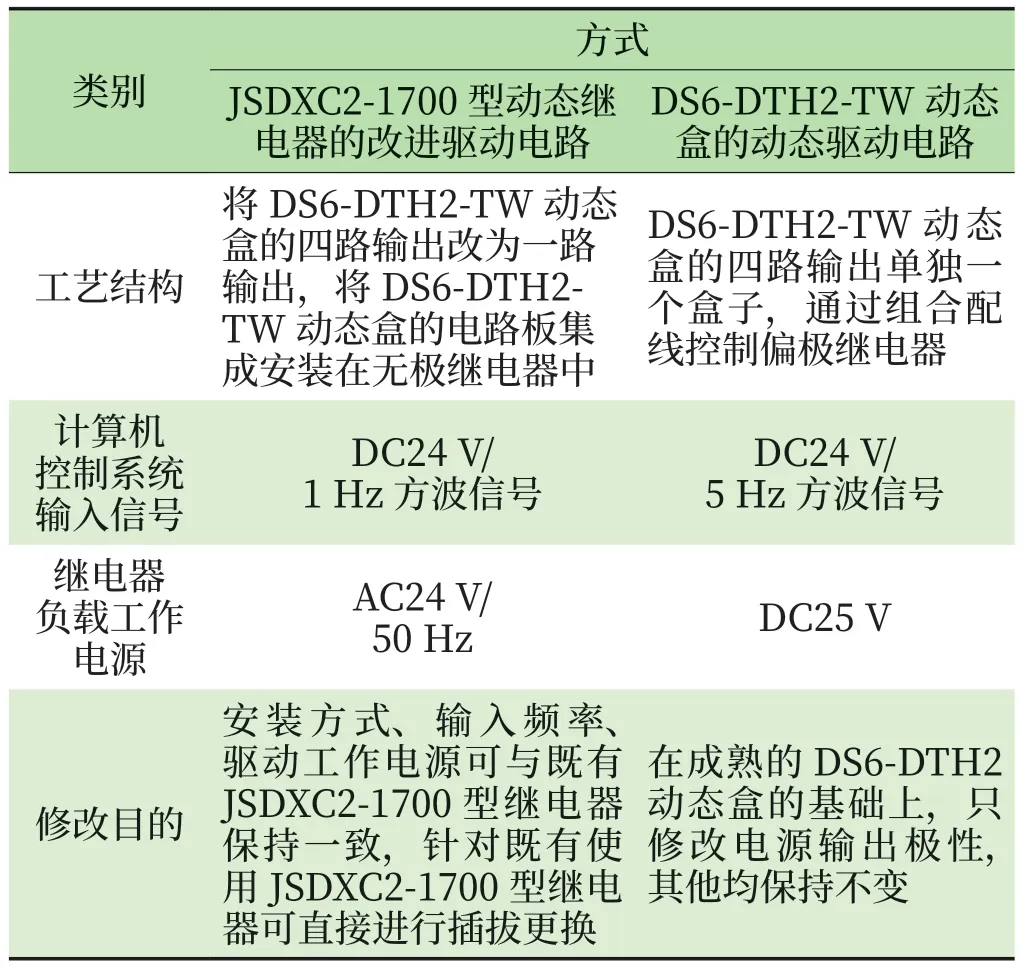
表1 JSDXC2-1700型動態繼電器的改進驅動電路技術對比Tab.1 Improved drive circuit technology comparison of JSDXC2-1700 dynamic relay
改進后的JSDXC2-1700型動態繼電器驅動電路功能示意如圖5所示。改進后的JSDXC2-1700型動態繼電器的動態驅動電路采用推挽電路為核心的電容泵式充電方式,驅動電路的原理更為可靠,不存在器件損壞造成故障升級的可能,克服繼電器錯誤吸起的故障。同時,負載的繼電器工作電源處理電路部分設計了針對工作電源的橋式整流和雙重濾波電路,繼電器工作電源可兼容AC24 V和DC25 V兩種制式,適應各類信號電源屏供電。改進后的JSDXC2-1700型動態繼電器電路能滿足既有站場中的駝峰控制系統的設計和控制要求。
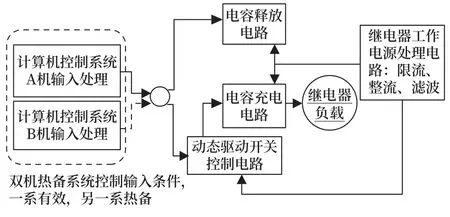
圖5 JSDXC2-1700型動態繼電器改進電路功能Fig.5 Improved circuit functions of JSDXC2-1700 dynamic relay
4 結語
JSDXC2-1700型動態繼電器改進電路修改完成后,經過技術評審、性能測試滿足現場實際需求,安全性和可靠性優于既有的JSDXC2-1700型動態繼電器,改進后的驅動電路不存在器件損壞造成故障升級的可能。自2019年8月,在上海局蕪湖東駝峰場進行現場更換應用,相關繼電器運行穩定。2021年7月,改進后的JSDXC2-1700型動態繼電器在上海局南京東駝峰、徐州北上行駝峰等站進行推廣使用,現場運用穩定。后續可在類似站場現場維護中推廣使用,對類似站場問題也可借鑒。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06