地球同步轉移軌道數字式太陽敏感器視場局部修正*
2022-08-27 12:20:58葉立軍劉付成寶音賀西
飛控與探測 2022年3期
葉立軍,劉付成,寶音賀西
(1.清華大學 航天航空學院·北京·100084;2.上海航天控制技術研究所·上海·201109;3.上海市空間智能控制技術重點實驗室·上海·201109;4.上海航天技術研究院·上海·201109)
0 引 言
數字式太陽敏感器(本文簡稱數太)是一種經典的測量太陽方向矢量的敏感器,具備原理簡單、功耗低、質量小、視場大、可靠性高等優點,在衛星上具有廣泛的應用。雖然數太低測量噪聲小,但系統誤差大,因此需要對其進行修正后再使用。例如,在地球同步軌道(Geosynchronous Orbit, GEO)段,配合地球敏感器等其他單矢量姿態敏感器進行雙矢量定姿,確定衛星三軸姿態;地球同步轉移軌道(Geosynchronous Transfer Orbit, GTO)遠地點點火段,可作為衛星對地指向控制期間的姿態敏感器;還可以將其安裝于衛星巡航對日面附近,作為GTO巡航段對日控制期間的姿態敏感器。
對于某些GEO衛星,在其轉移軌道段進行遠地點點火時,為了提高衛星姿態控制指向精度,需細分為小步長控制技術(如控制周期約0.1s)。而小步長模式下,星載軟件可能無法完成星敏數據采集及星敏姿態解算,或者遠地點點火時姿態抖動劇烈可能引起星敏跟蹤相對困難,因此在轉移軌道遠地點點火模式下,可能用到數太+地敏的三軸姿態確定模式。
受內外方位參數不準確等影響,數太測量往往存在較大的系統偏差,引起衛星姿態指向控制誤差,導致燃料浪費,進而減少GEO衛星在軌工作壽命。對于一個總變軌燃料約2000kg的衛星,如果對應1°控制誤差導致約40kg的燃料浪費,若節省這部分燃料,衛星會額外獲得約1年位置保持所需速度增量,進而延長衛星使用壽命。因此,為了盡量節省轉移軌道期間燃料,需在遠地點點火前對數太系統誤差進行修正。
GTO衛星軌道一般為近地點約200km,遠地點約36000km的大橢圓軌道。由于近地點軌道高度過低,可能引起軌道快速衰減,一般在第一或第二個遠地點就需要執行遠地點點火,以抬高近地點軌道高度。因此,如何在衛星入軌后遠地點點火前不到6h時間內,快速獲得所需的數太校準的實測值和標稱值是需要解決的問題。
本文以工程實用為目標,通過姿態路徑規劃,使太陽在數太視場內繞指定局部區域(局部區域是指數太視場內特定兩維角度形成的相平面區域)的邊緣行進,獲取數太和對應的星敏數據作為修正樣本,以星敏數據為基準,采用二元三次多項式模型修正數太兩軸測量系統誤差,最后在指定的局部視場內任找一條太陽運行路徑,用于驗證在該局部區域內數太測量系統誤差的修正效果。
1 總體修正策略
數太視場局部修正的總體策略是,在巡航對日模式下衛星能源和星載計算資源充裕時,獲得數太修正所需樣本數據(包括星敏測量數據和數太測量數據),并對數太視場進行針對性的局部修正;當在遠地點點火模式下計算機計算資源緊缺而無法使用星敏姿態確定時,采用視場局部修正后的數太,由姿態基準與地平儀聯合姿態確定,可實現遠地點點火期間衛星較高精度的指向控制,并盡可能節省轉移軌道燃料消耗。
GEO衛星通常配置以整星姿態為基準的星敏感器,其精度一般可達0.01°,此外,星敏與數太之間熱變形誤差為0.01°量級,該誤差比數太測量誤差小1個數量級,因此可將星敏作為數太的標校基準。星敏視場與數太視場互不重疊,太陽在數太視場內運動,在此期間星敏必然不受太陽光干擾,可以正常工作,這是本文方法可行的基礎。
在巡航對日模式下(第一次遠地點點火前),衛星對能源需求少,抽出一段時間(如90min),讓衛星姿態稍微偏離標稱對日姿態,完成對數太局部視場修正所需數據采集,整個過程示意圖如圖1所示。

圖1 姿態路徑規劃示意圖Fig.1 Schematic diagram of attitude path planning
圖1中,衛星在巡航對日模式下,太陽穩定在標號為“0”的初始標稱姿態。通過依次設置目標姿態(通過設置不同的衛星俯仰和偏航兩軸姿態偏置角實現),控制衛星依次通過編號為①→②→③→④→①的目標姿態,上述機動執行完畢后,返回標號為“0”的初始標稱姿態。
這樣太陽在數太視場內的投影會劃過一個封閉曲線,且該封閉曲線形成的區域應完全包絡遠地點點火期間太陽在數太視場內的運行軌跡。盡量均勻地選取封閉曲線上的若干點(點的個數需大于二元次多項式修正算法參數的個數),每個點均同時包含星敏測量數據和數太測量數據,這些點就是數太修正的樣本。
數太視場局部修正的主要步驟示意如圖2所示。
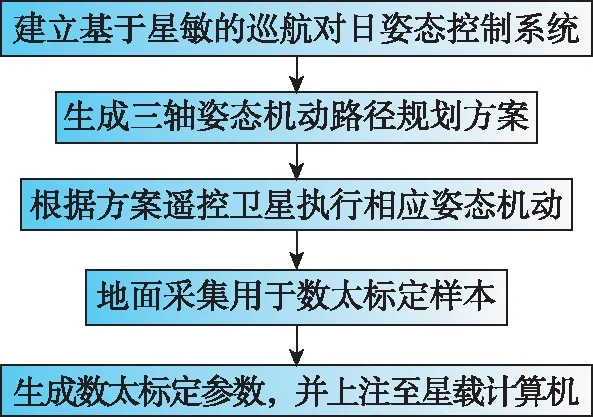
圖2 數太視場局部修正步驟Fig.2 Process of partial field of view calibration for DSS
圖2中,各步驟相應描述如下:1)建立巡航對日坐標系,并基于星敏計算巡航對日三軸姿態;2)根據遠地點太陽在數太視場中的運行路徑,規劃本次姿態機動路徑,簡單起見,可采用多邊形來規劃姿態機動路徑(如圖1中采用了四邊形規劃姿態機動路徑),路徑規劃問題就轉化為多邊形定點兩軸目標偏置姿態角計算問題;3)在巡航對日模式下,將幾組目標偏置姿態分別按①→②→③→④→①的順序依次上注,引導衛星按規劃好的路徑完成姿態機動;4)按等間距原則選取姿態機動路徑上的若干采樣點,得到同一時刻數太坐標系下太陽矢量(實測值)和基于星敏計算的太陽矢量(理論值);5)采用事先開發的數太修正程序,得到數太修正參數,并上注至星載計算機。
一般來說,每次遠地點點火衛星在慣性空間的姿態指向變化很小,太陽在數太視場中的運行路徑比較固定,且近似為直線。在選擇數太修正視場時可充分兼顧所有遠地點點火,地面獲取樣本數據后,采用二元多次多項式修正算法,可得到點火期間數太修正參數。
若點火策略有變(便如在計劃外的非遠地點點火),或預計下一次遠地點點火時太陽在數太內的運行軌跡將超過設定的封閉區域,還可以根據需要再次采用本文方法,在點火前的巡航對日模式段重新進行數太視場局部修正。
2 二維曲面擬合修正算法
目前,針對探測器或鏡頭校準的文獻有很多。胡小亮等和徐芳等采用多項式變形修正算法實現圖像的全局高精度擬合;崔洪州等引入鏡頭畸變率的概念,將二維曲面擬合簡化為一維曲線擬合,大大減少了待修正參數,實現鏡頭畸變修正,但該方法僅適用于徑向畸變的探測器,不適用于多種系統誤差相互耦合的探測器畸變修正;丁瑩等采用標準網格模型求解包括徑向、離心以及薄棱鏡在內的多項鏡頭畸變系數,大大提高了修正精度,但該方法需要樣本數均勻覆蓋整個探測器,而本文背景下,系統使用數太前,可用于數太修正的時間短,無法獲取整個數太探測器的樣本數據,因此該方法不適用。
通過姿態規劃機動,獲取待修正區數太局部視場樣本數據,每個樣本數據包括數太實測值和理論值。采用二元多次多項式修正算法,可以確定理論值與實測值的對應關系,二元次多項式修正模型如下
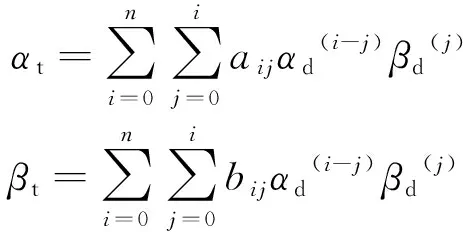
(1)
其中,(,)為基于星敏計算的數太兩軸角度;(,)為數太測量的兩軸角度;和為修正系數。
根據式(1),二元次多項式修正算法參數的個數為
=(+1)(+2)
(2)
根據式(2),與多項式次數呈平方關系,多項式次數越高,修正精度越高,但越大,計算量也相應越大。此外,本文采用數太視場局部修正方法,越大,樣本點本身修正精度越高,但遠離樣本點的姿態解算精度會被迅速放大。遠地點點火時,太陽處于樣本點所圍成的區域內部,對樣本點本身修正精度太高,反而可能引起內部區域修正精度下降。因此,不能過大,一般基于星上計算資源和精度需求綜合考慮選取。
3 修正樣本獲取
3.1 巡航對日姿態控制
巡航對日坐標系為參考坐標系,巡航對日坐標系到慣性系的3×3姿態轉移矩陣表示為

(3)
其中,,,分別表示巡航對日坐標系三軸在J2000坐標系下的單位矢量;下標I代表慣性系,下標J代表巡航對日坐標系。
式(3)中各矢量表達式為

(4)
其中,=()為太陽矢量在J2000慣性坐標系下的單位矢量,下標S代表太陽;=(0 0 1)為J2000慣性坐標系軸。

在巡航對日模式下,巡航對日坐標系到衛星本體坐標系的四元數為
=??
(5)
其中,為巡航對日坐標系到慣性系的四元數,通過等價轉換得到;為星敏測量得到的慣性系到星敏系的四元數;為星敏到衛星本體的安裝四元數,下標T代表星敏坐標系,下標B代表衛星本體坐標系。
以為姿態基準,在控制作用下,使衛星三軸姿態保持在0附近,即實現基于星敏的巡航對日控制。
3.2 姿態機動路徑規劃
姿態機動路徑規劃,就是在巡航對日模式下,通過設置衛星三軸姿態偏置角,按時序依次驅動衛星姿態機動至相應規劃點,則太陽會以預期路徑附近在數太視場中運動。
在進行姿態路徑規劃時,需考慮以下幾點:第一,這個規劃的軌跡必須完全包圍遠地點點火時太陽在數太視場內的運行軌跡,其中遠地點點火時太陽運動軌跡由地面仿真生成;第二,490N點火弧段比較短(一般約12°),可近似為直線,本文采用四點規劃(凸四邊形區域)法對該軌跡進行覆蓋。
所謂的姿態機動路徑規劃,就是通過設計合適的目標姿態,使太陽落在數太視場內的指定區域。本文以衛星軸對日為例,旋轉衛星軸(通過設置俯仰偏置角)和衛星軸(通過設置偏航偏置角),即可實現太陽在數太視場內的改變。對于某個待規劃點,巡航對日軸在數太坐標系的矢量為
(6)
其中,為衛星本體系到數太坐標系的3×3姿態轉移矩陣,下標D代表數太坐標系;為待規劃點對應的俯仰偏置角;為待規劃點對應的俯仰偏置角。
根據之前給出的規劃點坐標和式(6),可解算出和。和也可視為目標姿態,采用巡航對日段姿態控制參數,以更新目標姿態后的為姿態基準,衛星三軸姿態收斂并保持到0附近的過程,即姿態按規劃路徑機動的過程。
3.3 數太修正用理論值計算
依次設置3.2節4個規劃點對應的俯仰和偏航姿態偏置角,使衛星執行相應的姿態機動。地面通過遙測獲取一系列采樣點,包括:數太測量值(,),星敏測量四元數,以及太陽在慣性系下的單位矢量,可計算出基于星敏的數太修正用理論值(,)
(7)

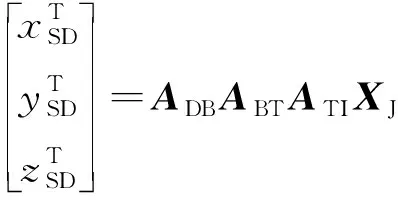
(8)
式中,是星敏坐標系到衛星本體坐標系的3×3姿態轉移矩陣;是等價轉換得到的J2000慣性系到星敏坐標系的3×3姿態轉移矩陣。
4 仿真與分析
數太畸變誤差包含了內外方位元素誤差,其中外方位元素誤差主要是安裝誤差;內方位元素誤差包括徑向畸變誤差和切向畸變誤差等。為了使修正前后效果更直觀,設計數太最大誤差約7°。
局部區域的選定與后續490N點火時的任務有關, GTO段490N遠地點點火時長一般不超過2h,對應點火弧段一般不超過15°,而數太視場為±60°,490N點火弧長在數太視場內占比很小,其運動軌跡一般也可近似為一條直線。本文將修正的局部區域適當放大到數太對角線區域,一方面是為了突出修正的適用范圍;另一方面為了增加姿態機動路徑長度,證明在指定時間內可以完成姿態機動任務。
在姿態機動過程中,地面通過遙測獲得一系列數太修正用樣本數據,如表1所示。

表1 數太修正用樣本數據Tab.1 Sample data for calibration of DSS
在數太探測器視場內,這些樣本點如圖3所示。

圖3 星敏感器測量四元數與衛星姿態角的變化Fig.3 Comparison of dark original color statistic distribution
圖3中,理論(紅色星號)代表基于星敏測量計算出的太陽在數太探測器坐標中的位置;測量(藍色圓圈)代表數太測量太陽在數太探測器坐標中的位置。可以看出,由于數太徑向畸變誤差的原因,與理論太陽位置相比,數太實際測量太陽位置更加靠近數太視場中心。
基于式(1),采用最小二乘法,擬合得到二元三次多項式修正參數,如表2所示。
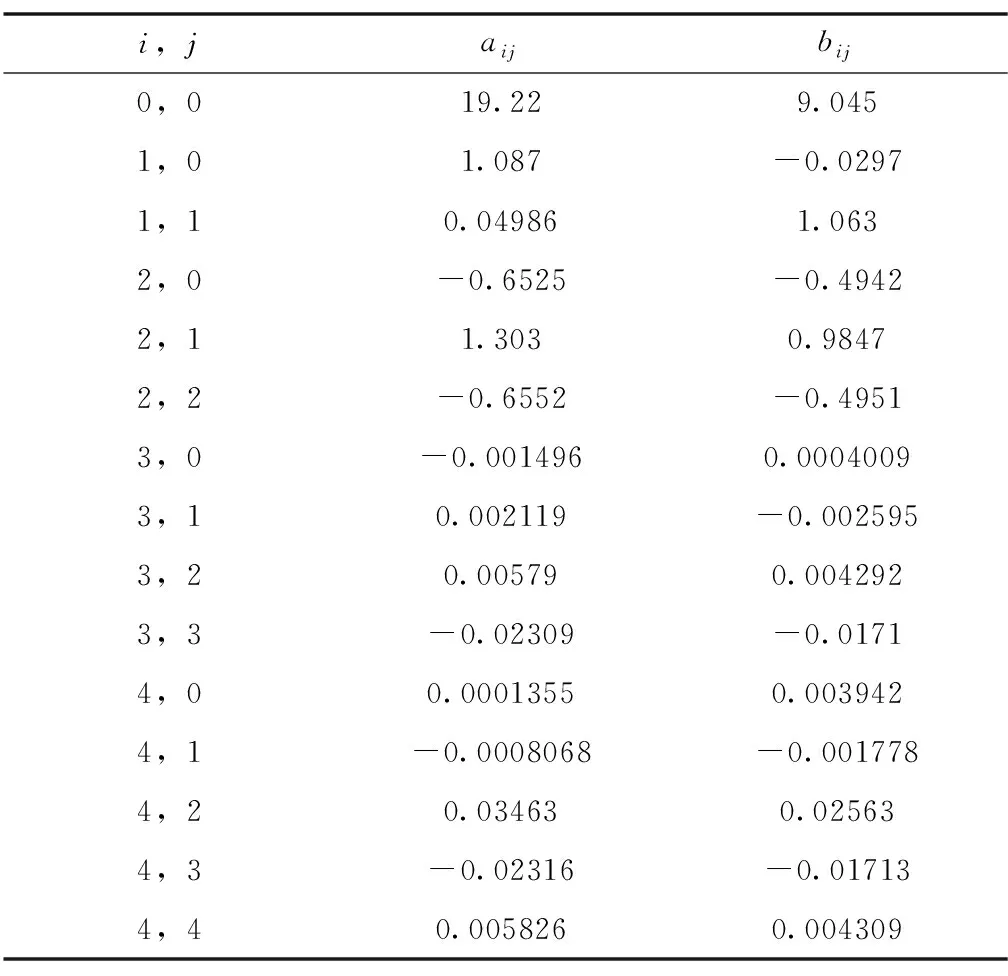
表2 多項式修正參數Tab.2 Parameters for polynomial correction
基于局部視場樣本數據得到修正參數,計算數太全視場內修正誤差,如圖4所示。
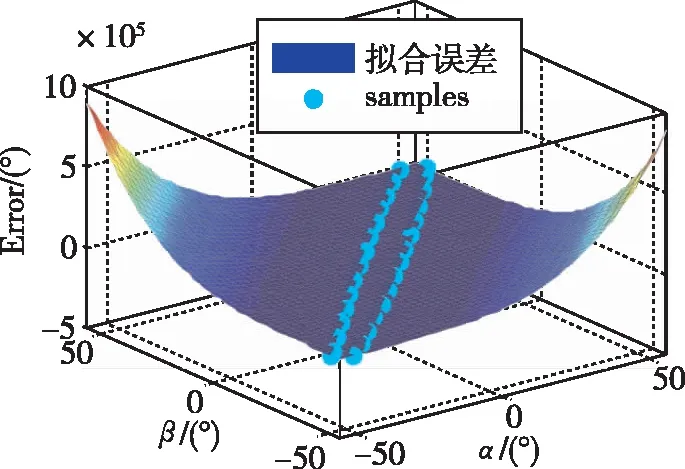
圖4 數太全視場修正誤差二維曲面圖Fig.4 Full field correction error surface diagram of DSS
由圖4可以看出,經修正,在修正區域內誤差較小,而修正區域外誤差急劇變大,視場邊緣處誤差甚至達到850000°。也就是說,本文方法僅適用于數太視場局部修正。
為了驗證局部區域的修正效果,除了控制衛星沿規劃路徑運行一圈,以驗證路徑上修正誤差情況外,還在規劃路徑內部額外規劃一條路徑,用于驗證局部區域內部修正后誤差,修正效果如圖5所示。

圖5 星敏感器測量四元數與衛星姿態角的變化Fig.5 Comparison of dark original color statistic distribution
圖5中,基準(紅色實線)代表基于星敏測量計算出的太陽在數太探測器坐標系中的運行軌跡;修正前(藍色實線)代表數太測量太陽在數太探測器坐標中的運行軌跡;修正后(黑色點虛線)代表經視場局部修正后,數太測量太陽在數太探測器坐標中的運行軌跡。可以看出,在局部區域以外,數太修正誤差遠大于修正前數太誤差;但是在局部區域以內,數太修正誤差則遠小于修正前數太誤差。因此,本文介紹的數太視場局部修正僅適用于當太陽在規劃區內時的數太修正,一旦太陽運行軌跡處于規劃區以外,應立即停止數太修正。
進一步分析數太修正前誤差曲線,如圖6所示。
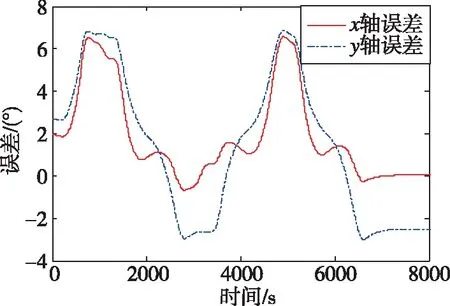
圖6 修正前數太兩軸姿態角測量誤差Fig.6 The measurement error of two axis attitude angle for DSS before correction
圖6中,軸誤差(紅色實線)代表數太修正前在數太軸姿態誤差;軸誤差(藍色點虛線)代表數太修正前在數太軸姿態誤差。可以看出,數太修正前兩軸最大誤差約7°。
數太修正后誤差曲線,如圖7所示。

圖7 修正后數太兩軸姿態角測量誤差Fig.7 The measurement error of two axis attitude angle for DSS after correction
圖7中,軸誤差(紅色實線)代表數太修正后在數太軸姿態誤差;軸誤差(藍色點虛線)代表數太修正后在數太軸姿態誤差。可以看出,數太修正前兩軸最大誤差約0.6°,且離規劃邊界越近,修正后誤差越小。
經過修正前后數太測量誤差對比,可以看出,修正后數太測量誤差比修正前減小約10倍,精度提升明顯。
5 結 論
本文討論了GTO段遠地點點火期間數太定姿條件,在GTO巡航段以星敏為姿態基準,采用姿態路徑規劃的方式獲取數太局部視場樣本數據并遙測下傳,地面采用二維曲面對樣本數據系統誤差進行擬合。仿真證明,在490N點火期間,采用擬合后的數太測量誤差減小了1個數量級。本文所提方法在工程應用中有以下幾點需要注意。
1)在視場局部修正區域內,修正后的數太兩軸姿態測量誤差比修正前小1個數量級左右,但在局部修正區以外,修正后的數太兩軸姿態測量誤差則遠大于修正前,因此,一旦太陽運行軌跡處于規劃區以外,應立即停止數太修正;
2)遠地點點火期間,太陽在衛星本體坐標系內運行軌跡固定,僅需針對其中一個數太進行規劃即可,無需對每個數太都進行規劃;
3)本文僅討論了采用本方法可以有效減小數太在490N點火時局部視場的系統誤差,但數太局部視場修正所需樣本數據最優選取辦法還有待研究;
4)采用姿態偏置實現太陽在數太視場中運動,此過程中,使太陽移動到目標點的三軸姿態偏置方法有無數種(衛星繞太陽矢量的軸是自由的),本文選取原則是姿態轉動角不偏置,工程上還可根據實際情況添加對該軸的約束。