基于全自動推夾器設備的設計與研究
2022-08-24 09:08:44黃浩釗張瑞龍
現代制造技術與裝備 2022年7期
張 樂 黃浩釗 張瑞龍
(西安交通工程學院,西安 710300)
隨著第六代辦公自動化的發展,辦公自動化開始普及。辦公自動化是將現代辦公與計算機相結合的新型辦公方式,辦公過程具有高效化和智能化的特點。辦公自動化或者數字化辦公可以優化現有的管理組織結構,調整管理體制,提高辦公效率,增加協同辦公能力,強化決策能力。隨著印刷數字化的爆發式發展,原有的印刷工藝和流程被顛覆[1]。近年來,印后裝訂技術發生了顯著轉變,即由手動和半自動化轉變為智能化、數字化以及自動化,速度由低速向高速發展[2]。例如,全自動推夾器實現了推夾器的自動化。
1 全自動推夾器設計方案
1.1 推夾器工作原理
得力8591A型推夾器在裝訂文件時,將裝訂夾安裝于裝夾口的內部通道,由推夾鈕將其推至出夾口通道,將裝訂的文件放置于出夾口并調整位置,同時將推夾鈕繼續推出,即可完成裝訂。
1.2 推夾器自動化方案
設計人員通過總結對比辦公領域中裝訂設備的優缺點,發現目前文件裝訂設備存在的問題和推夾器具有的巨大潛在優勢,因此改造和設計了全自動推夾器。與傳統的機械動力系統、傳動系統、執行系統相比,自動化推夾器的機械手應具有控制功能和檢測功能,可以實現推夾器的精準運動和作業[3]。最終,設定方案選擇以手動推夾器為原型進行設計制作。
全自動推夾器利用Arduino Nano開發板實現控制,將L293D驅動器作為橋梁來連接開發板和電機并加裝傳感器,以保證裝置運轉的智能性和穩定性。
2 全自動推夾器的自動化設計
2.1 硬件部分的設計
2.1.1 開發板
Arduino是經過二次封裝的單片機系統,具有成本低廉、開源、接口豐富、配套設備易獲取、體積小、計算能力強、兼容性好以及便于開發和使用等優點。設計人員利用推夾器輕便易攜帶的優勢,設計了符合要求的Arduino Nano電路,如圖1所示。
2.1.2 電機驅動芯片
因為開發板不能直接控制直流電機的正反轉,所以需要將電機驅動芯片作為橋梁來連接開發板和直流電機。L293D驅動器實物如圖2所示。
L293D驅動器驅動馬達的原理示意圖,如圖3所示。將馬達連接到控制器的兩個輸出引腳,并將對應的兩個輸入引腳分別作為高電平和低電平,此時電流便會流過馬達使其旋轉。
2.1.3 傳感器
全自動推夾器使用兩種設備來確保裝訂過程的穩定性和可靠性。第一種是光電感應模塊,用來感應裝訂文件。光電感應模塊感應到紙張深入時,會自動啟動全自動推夾器的裝訂流程。第二種是為了感應全自動推夾器內頂針的位置而添加的限位開關,用來保證全自動推夾器每次裝訂時都能將裝訂針推到指定位置。
2.2 軟件部分的設計
自動推夾器使用的是Arduino Nano開發板,采用C語言編寫程序。自動推夾器代碼編寫流程如圖4所示。
3 全自動推夾器結構設計
結構設計初期,先采用Autodesk Fusion 360軟件建模,模擬運轉全自動推夾器的整體結構,再確定全自動推夾器的機械結構模型[4-5]。根據人體力學設計的全自動推夾器具有良好的手握效果,可以減輕長時間帶來的疲勞感。全自動推夾器結構模型如圖5所示。
由圖5可知,設計的自動推夾器可分為外殼、機械結構和電路3大部分。
外殼即自動推夾器的“身體”。采用3D打印技術,一體化成型,結構簡單,外觀簡約。采用集成化設計,直接集成了機械結構的卡槽,并與其余兩個部件高度配合。
機械結構即自動推夾器的“心臟”。它包含所有的動力結構,具有結構簡單、運行穩定、壽命長以及耐磨損等特性。
電路部分即自動推夾器的“大腦”。它控制整個設備的運轉,使用Arduino開發板控制L293D電機驅動芯片,以保證電機穩定可靠。此外,3個位置傳感器可以確定電機位置,從而保證電機運轉的準確性。
4 全自動推夾器實驗分析
全自動推夾器按照整體方案設計3D建模打印外殼,并將主程序燒錄進開發板,安裝硬件部分,以達到預期目標。產品最終測試參數如表1所示。
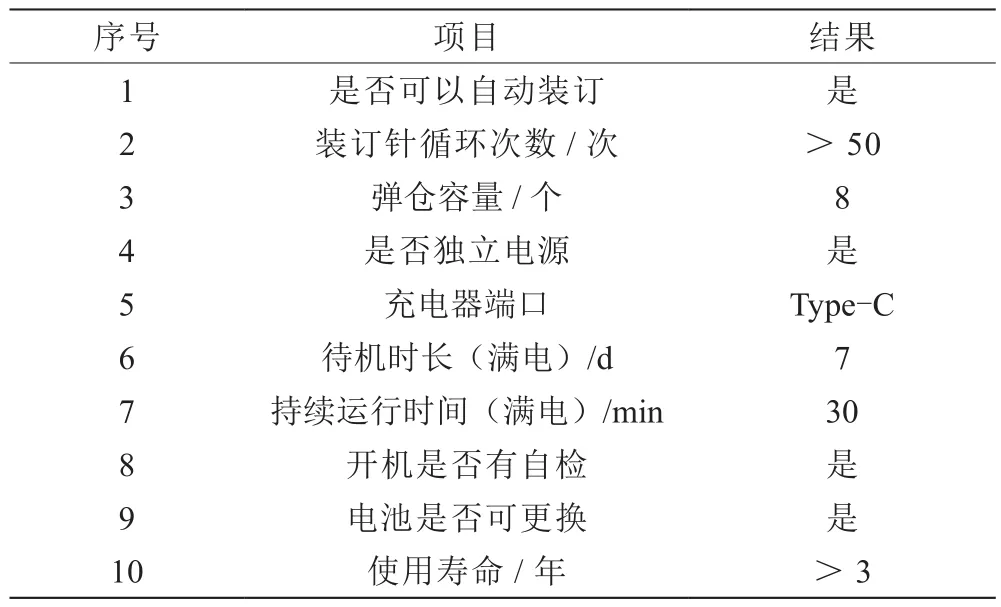
表1 產品最終測試參數表
5 結語
全自動推夾器作為自動化辦公的重要工具,具有節約環保的應用優勢,在實際應用中有利于節約資源和保護環境。同時,科學技術的發展進一步提升了制造機械驅動設備的技術水平。研發和應用高質量、小體積的驅動設備,可以有效節約生產資源。目前,相關人員已經改善了辦公領域的文件裝訂設備在使用時容易出現損傷紙張、使用不便以及效率低下等問題。實踐證明,設計的全自動推夾器已基本滿足辦公自動化的使用需求,達到了預期的設計目的。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
活力(2019年21期)2019-04-01 12:17:06
經濟技術協作信息(2018年15期)2019-01-23 07:05:28
電子制作(2018年11期)2018-08-04 03:26:08
中國教育技術裝備(2016年11期)2016-12-01 06:52:53
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
辦公自動化(2016年18期)2016-08-20 12:50:18
工業設計(2016年12期)2016-04-16 02:52:00
