基于STM32F103C8T6的藍牙智能垃圾桶設計
2022-08-24 11:18:58周朝霞
無線互聯科技 2022年12期
周朝霞
(廈門大學嘉庚學院,福建 漳州 361305)
0 引言
隨著科技的發展和人們生活水平的提高,人們越來越追求舒適、安全、節能、智能化的家居生活,而垃圾桶作為日常生活的必需品,越來越受到大眾關注[1]。
1 系統總體設計
本文設計的藍牙智能垃圾桶,以STM32F103C8T6單片機為主控芯片,外圍包括超聲波傳感器、紅外接收傳感器、HC05藍牙通信模塊、步進電機、直流電機、RGB燈。系統整體硬件框架如圖1所示[2-4]。
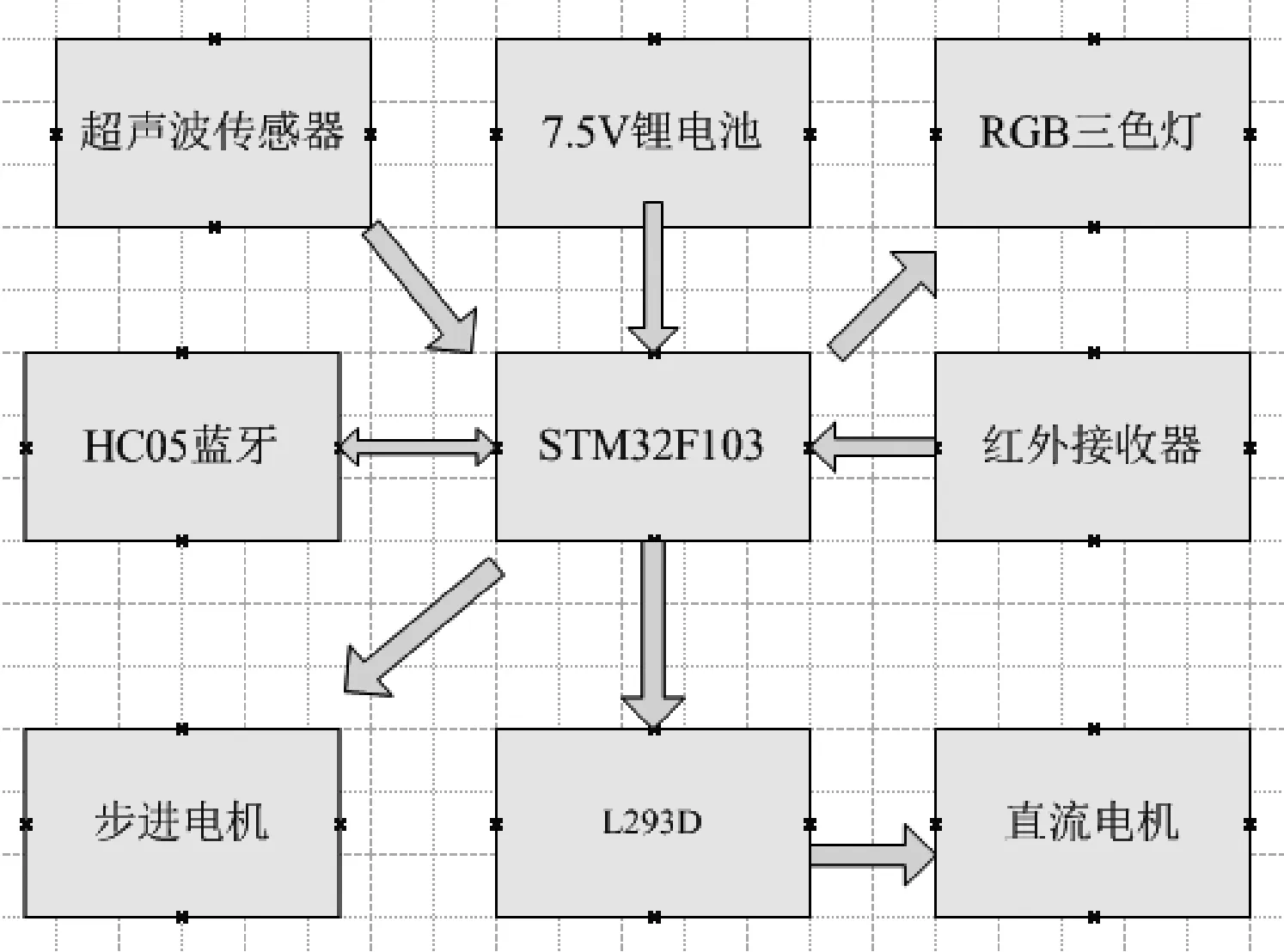
圖1 整體硬件框
2 系統功能和特色
(1)自動開關桶蓋功能:當扔垃圾時,無需接觸,超聲波傳感器自動感應人手,電機快速反應,迅速打開垃圾桶蓋;人手離開,延時20 s,垃圾桶蓋自動關閉。
(2)垃圾桶容量提醒功能:RGB三色顯示垃圾桶容量,當垃圾桶未滿30%時,顯示綠燈;當30%~70%時,顯示藍燈;當超過70%時,顯示紅燈。
(3)紅外遙控功能:用戶通過紅外遙控器控制垃圾桶的前進、后退、轉彎、開蓋、關蓋。
(4)手機藍牙控制功能:系統里嵌入HC05藍牙模塊,可遠程控制垃圾桶的移動、轉彎、自動開關蓋等功能,同時手機端也可顯示桶內垃圾容量。
3 系統硬件設計
3.1 STM32單片機
智能藍牙垃圾桶采用意法半導體(ST Microelect ronics)開發的增強型微控芯片STM32F103C8T6為主控器,是ARM Cortex-M3的內核,具有32位CPU、64 K的存儲器容量、72 MHz的系統時鐘、10×12 bit的模數轉換器A/D,片內外設主要有存儲器(DMA)、電機控制脈沖寬度調制(PWM)和溫度傳感器[5]。最小系統電路如圖2所示。

圖2 最小系統電路
3.2 超聲波模塊
設計選用HS-SR04超聲波模塊實現桶蓋和物體的測距及桶蓋到桶底的測距,HS-SR04型超聲波模塊的工作原理是發送端發出超聲波信號后,以340 m/s的聲速向前面的目標定向發射,遇到障礙物后立刻反射回來,被HS-SR04型超聲波模塊的接收模塊接收。通過STM32單片機快速計算,按照“距離=時間×聲速”的計算公式,得出桶蓋與桶底之間的距離,實現垃圾桶容量的檢測。
3.3 藍牙模塊
本次設計使用HC-05無線藍牙模塊實現單片機和手機的無線通信,將其正常工作的頻段2.4 GHz ISM,GFSK作為它的調制方式。主控芯片STM32F103 C8T6單片機通過串口連接HC-05,安卓手機端自帶藍牙,通過手機App與單片機藍牙設備建立配對,藍牙模塊將接收的數據傳送給單片機,單片機處理后控制電機的運轉和桶蓋的開關[7]。工作原理如圖3所示。

圖3 藍牙工作原理
3.4 電機模塊
本設計選用L293D驅動芯片控制兩個獨立運轉的直流電機,該驅動芯片采用單H橋集成電路,具有很強的驅動能力和工作電壓高、輸出電流大、響應頻率高、穩定性好等特點,一個L293D芯片有4個輸出端,能夠同時控制兩直流電機的正轉、反轉及停止[8]。
3.5 電源模塊
電源是整個硬件電路的重要組成部分,它為系統提供穩定的工作電壓。如圖4所示,使用兩節3.7 V充電鋰電池串聯給系統供電,供電電壓為7.4 V,因STM32外圍硬件模塊的工作電壓是5 V。為保證電源正常運行,選用LM7805穩壓芯片對7.4 V的電壓進行降壓處理,將7.4 V電源電壓穩定到5 V。電源模塊結構如圖4所示。

圖4 電源模塊
3.6 手機藍牙App
4 系統軟件設計
軟件設計方面,系統初始化設定參數,超聲波測距檢測垃圾桶用量并用不同顏色RGB燈指示,超聲波測距判斷是否需打開桶蓋和是否有紅外遙控信號或手機藍牙指令,單片機接收到指令做相應處理并控制執行元器件做出反應。主程序流程如圖5所示。
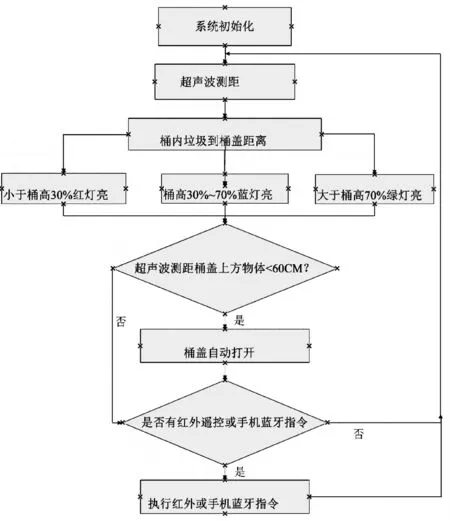
圖5 主程序流程
5 結語
本文設計的藍牙智能垃圾桶實物如圖6所示,4輪驅動小車安裝在桶底,4個電機的正負極銅片通過杜邦線和桶內底部的2個L293D驅動板連接,桶蓋下有1個超聲波傳感器,與主控單片機STM32F103C8T6相連,以測量垃圾桶的容量。垃圾桶的桶口安裝另一超聲波傳感器、紅外接收傳感器和1個RGB燈,該超聲波傳感器用來測量桶蓋上方物體距離,實現自動開蓋功能,紅外接收傳感器用來接收來自紅外遙控器的信號,實現紅外控制桶蓋的開啟與閉合、垃圾桶的前進后退轉彎,RGB燈用來提醒用戶垃圾容量。

圖6 自動開蓋
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
裝備制造技術(2019年12期)2019-12-25 03:06:46
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年12期)2018-08-01 00:48:04
家庭影院技術(2017年9期)2017-09-26 03:41:45