單行直插式木薯種植機(jī)的設(shè)計(jì)與優(yōu)化
2022-08-22 18:27:40石婷婷廖宇蘭彭緒友袁成宇
關(guān)鍵詞:方向
石婷婷,廖宇蘭,彭緒友,袁成宇
(海南大學(xué)機(jī)電工程學(xué)院,海口570228)
木薯、甘薯、馬鈴薯是世界3大薯類,木薯在惡劣條件下易活、繁衍能力較強(qiáng)。木薯由于其優(yōu)異的生物特性具有“淀粉之王”“先鋒作物”“饑荒儲(chǔ)糧庫(kù)”等美譽(yù)。木薯塊根富含非常高的營(yíng)養(yǎng)價(jià)值和實(shí)用價(jià)值,被廣泛地應(yīng)用于制糖、醫(yī)藥、化工、可降解塑料等多個(gè)行業(yè),在農(nóng)作物中有舉足輕重的地位。我國(guó)木薯主要種植在熱帶、亞熱帶地區(qū),是當(dāng)?shù)丶Z食儲(chǔ)備及工業(yè)原料的重要來(lái)源[1-4],在海南、廣東和廣西等省(區(qū))種植面積較大[5-6]。木薯的種植基本上先起壟,在壟上進(jìn)行種莖插植。由于熱帶、亞熱帶地區(qū)多為黏質(zhì)土壤,并且天氣多雨,因此木薯的種植較費(fèi)工時(shí)。現(xiàn)階段,常見(jiàn)的木薯扦插方式根據(jù)種莖方向分為3種:平放、直插和斜插。直插的方式出苗較早且整齊、入土深、結(jié)木薯多[7]。我國(guó)木薯產(chǎn)業(yè)機(jī)械化起步較晚,2008年我國(guó)才研制了雙行(CASSAVACN~2)和四行(CASSAVACN~4)木薯種植機(jī)[8]。2018年,中國(guó)熱帶農(nóng)業(yè)科學(xué)院農(nóng)業(yè)機(jī)械研究寬窄雙行起壟種植栽培機(jī),但該機(jī)器只適用于大塊農(nóng)地,不適用于小塊地的農(nóng)戶[9-10]。目前市面上沒(méi)有可商業(yè)化生產(chǎn)的機(jī)器[11-12],木薯機(jī)械化的程度不高、功能也較為單一。
結(jié)合種植農(nóng)藝要求和農(nóng)戶需求,木薯多采用單行種植方式,便于兼顧人工中耕施肥除草等管理[13]。木薯主要有單種、間套種和地膜栽培等種植方式,以單種較多[14],以直插種植效果最佳[15]。直插種植時(shí)先開(kāi)出種植溝,按株距將木薯莖段種于溝內(nèi),株距800 mm較為適宜,覆蓋約15 cm厚的淺土,種植深度50 mm,既可節(jié)省木薯種莖用量和提高播種效率,又可獲得較高的木薯產(chǎn)量及較好的生長(zhǎng)性能和品質(zhì)[15-16]。本文設(shè)計(jì)了具有七連桿機(jī)構(gòu)的單行木薯直插式種植機(jī),通過(guò)仿真分析進(jìn)行性能優(yōu)化,以滿足種植戶和種植農(nóng)藝的需求,從而實(shí)現(xiàn)木薯機(jī)械化種植。
1 材料與方法
1.1 種植機(jī)結(jié)構(gòu)和工作原理
單行起壟直插式木薯種植機(jī)主要結(jié)構(gòu)包括可伸縮萬(wàn)向聯(lián)軸器、三點(diǎn)懸掛裝置、培土機(jī)構(gòu)、機(jī)架、減速器、四爪夾持機(jī)構(gòu)、鎮(zhèn)壓裝置、機(jī)架高度調(diào)節(jié)裝置、分苗器、座椅等,本研究種植機(jī)結(jié)構(gòu)如圖1所示。

圖1 木薯種植機(jī)三維結(jié)構(gòu)Fig.1 Three dimensional drawing of cassava planter
木薯種植時(shí),拖拉機(jī)牽引木薯種植機(jī)前進(jìn)并為其提供動(dòng)力。分種裝置通過(guò)旋轉(zhuǎn)使木薯種莖落在下方的鴨嘴栽植器內(nèi),在七桿式種植機(jī)的帶動(dòng)下,將種莖豎直插在起好壟的泥土地里,種植機(jī)后方的覆土輪將土壓實(shí)。拖拉機(jī)動(dòng)力輸出軸驅(qū)動(dòng)木薯種植機(jī)的動(dòng)力輸入軸,通過(guò)種植機(jī)的二級(jí)減速箱獲得合適的轉(zhuǎn)速,二級(jí)減速箱由1對(duì)直齒和1對(duì)斜齒組成。二級(jí)減速箱的輸出軸帶動(dòng)2組鏈輪,分別為分種裝置和七連桿機(jī)構(gòu)提供動(dòng)力。為了減速和實(shí)現(xiàn)間隙運(yùn)動(dòng)配合七連桿機(jī)構(gòu)(圖2)種植,分種裝置使用槽輪機(jī)構(gòu)帶動(dòng)分種盤(pán)。七連桿機(jī)構(gòu)帶動(dòng)鴨嘴栽植器將木薯種莖豎直插在木薯田里,動(dòng)力路線如圖3所示。
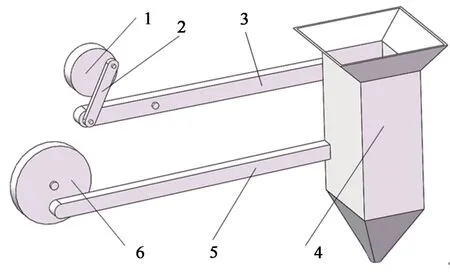
圖2 七桿式單行木薯種植機(jī)構(gòu)三維結(jié)構(gòu)Fig.2 Three dimensional structure of seven bar single row cassava planting mechanism
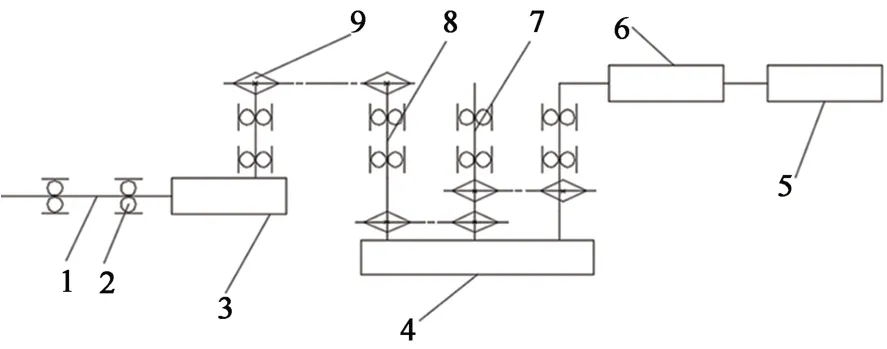
圖3 動(dòng)力傳動(dòng)路線Fig.3 Power transmission line
1.2 桿式栽種機(jī)構(gòu)的運(yùn)動(dòng)分析
以O(shè)點(diǎn)為坐標(biāo)原點(diǎn),水平方向?yàn)閄軸、豎直方向?yàn)閅軸建立直角坐標(biāo)系,如圖4所示。
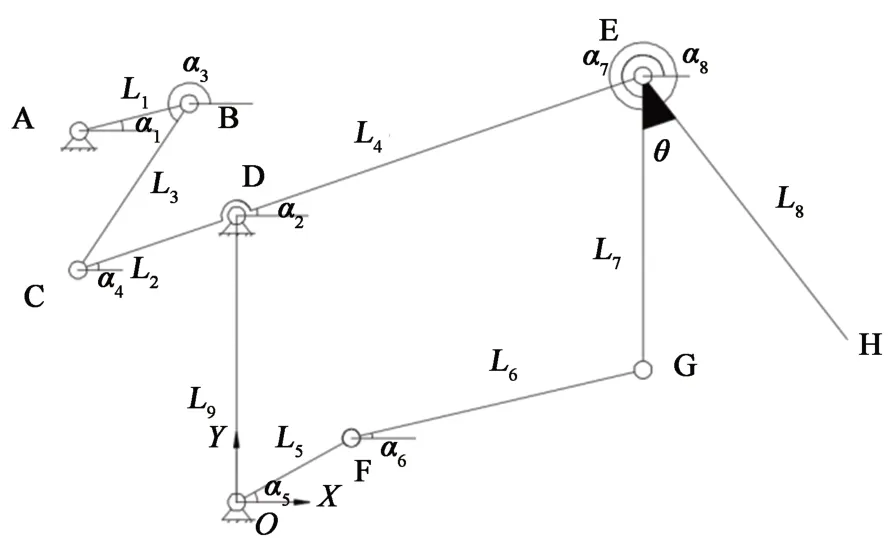
圖4 七桿式單行木薯種植機(jī)運(yùn)動(dòng)分析Fig.4 Kinematic analysis of seven bar single row cassava planter
1.2.1 位移方程 通過(guò)七桿機(jī)構(gòu)的相對(duì)運(yùn)動(dòng)關(guān)系建立運(yùn)動(dòng)學(xué)模型,各點(diǎn)位移方程如下。
①B點(diǎn)位移方程。

式中,XA為A點(diǎn)X方向位置,YA為A點(diǎn)Y方向位置;XB為B點(diǎn)X方向位置,YB為七桿機(jī)構(gòu)中B點(diǎn)Y方向位置;α1為A、B點(diǎn)之間夾角。
②C點(diǎn)位移方程。

式中,Xc為C點(diǎn)X方向位置,Yc為C點(diǎn)Y方向位置;XD為D點(diǎn)X方向位置,YD為D點(diǎn)Y方向位置;α2為C、D點(diǎn)之間夾角。
③E點(diǎn)位移方程。

式中,XE為E點(diǎn)X方向位置,YE為E點(diǎn)Y方向位置;;α4為E、D點(diǎn)之間夾角。
④F點(diǎn)位移方程。

式中,XF為F點(diǎn)X方向位置,YF為F點(diǎn)Y方向位置;XO為七桿機(jī)構(gòu)中O點(diǎn)X方向位置,YO為O點(diǎn)Y方向位置;α5為F、O點(diǎn)之間夾角。
⑤G點(diǎn)位移方程。

式中,XG為G點(diǎn)X方向位置,YG為G點(diǎn)Y方向位置;XF為F點(diǎn)X方向位置,YF為F點(diǎn)Y方向位置;XE為E點(diǎn)X方向位置,YE為E點(diǎn)Y方向位置;α7為E、G點(diǎn)之間夾角;α6為F、G點(diǎn)之間夾角。
⑥H點(diǎn)位移方程。

式中,XH為H點(diǎn)X方向位置,YH為H點(diǎn)Y方向位置;XE為E點(diǎn)X方向位置,Y E為E點(diǎn)Y方向位置;α8為E、H點(diǎn)之間夾角。

⑦H點(diǎn)的動(dòng)位移。式中,XH為H點(diǎn)的X方向位置,YH為H點(diǎn)Y方向位置;Xh為h點(diǎn)位移后的位置,Yh為h點(diǎn)位移后的位置;t為時(shí)間;V為速度。
1.2.2 機(jī)構(gòu)空間運(yùn)動(dòng)約束關(guān)系 根據(jù)木薯種植機(jī)
(圖5)的尺寸大小和木薯種植要求,對(duì)豎插式木薯種植機(jī)的尺寸提出以下要求:為了保證木薯的出芽率,縮短出芽時(shí)間,適合海南磚紅壤壟作木薯種植深度為50 mm[13];為了保證種植機(jī)在田間具有良好的通過(guò)性,機(jī)具不與土壤的發(fā)生碰撞,種植機(jī)機(jī)架的高度H為400 mm[14];為了保證木薯種能夠順利落入鴨嘴栽植器中,要求種植機(jī)長(zhǎng)度L為700 mm;根據(jù)市面上一般種植機(jī)機(jī)架的高度,機(jī)構(gòu)L的高度為300 mm;為保證木薯苗能插入土壤里,鴨嘴栽植器的長(zhǎng)度G為600 mm。
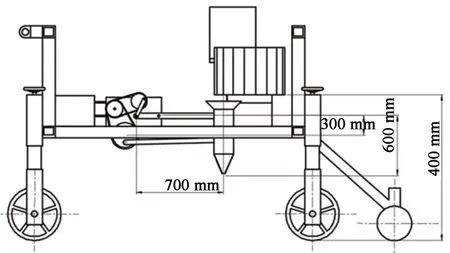
圖5 七桿式木薯種植機(jī)構(gòu)空間限制Fig.5 Space limitation of seven bar cassava planting mechanism
1.3 研究方法
利用Adams軟件對(duì)七連桿機(jī)構(gòu)中鴨嘴栽植器端點(diǎn)的運(yùn)動(dòng)軌跡進(jìn)行分析。在Adams軟件中,導(dǎo)入繪制好的三維模型,添加約束,施加驅(qū)動(dòng),并仿真導(dǎo)出端點(diǎn)位移數(shù)據(jù),通過(guò)后處理輸出軌跡。改變機(jī)構(gòu)的基本參數(shù),研究不同參數(shù)與種植機(jī)構(gòu)端點(diǎn)軌跡之間的關(guān)系。根據(jù)對(duì)七連桿參數(shù)分析以及木薯種植需求,選取曲柄AB長(zhǎng)度L1、搖桿CD長(zhǎng)度L2、連桿BC長(zhǎng)度L3、第2曲柄OF長(zhǎng)度L5、搖桿FG長(zhǎng)度L6、鴨嘴栽植器安裝位角度θ進(jìn)行仿真,分析機(jī)構(gòu)軌跡的變化對(duì)種植機(jī)構(gòu)端點(diǎn)軌跡的影響。
2 結(jié)果與分析
2.1 曲柄AB的長(zhǎng)度L1對(duì)端點(diǎn)軌跡之間的影響
L1與鴨嘴種植機(jī)端點(diǎn)軌跡的關(guān)系如圖6所示。可以看出,隨著曲柄AB長(zhǎng)度L1逐步加長(zhǎng),端點(diǎn)相對(duì)位移軌跡逐漸變尖,Y軸方向位移逐步變長(zhǎng);絕對(duì)位移軌跡中種植深度逐步加大,種植角度逐步呈現(xiàn)90°。軌跡最低點(diǎn)與X軸正方向夾角逐步減小。軌跡變化說(shuō)明L1變長(zhǎng)可以改變木薯種植深度,L1長(zhǎng)度為45 mm為最佳。
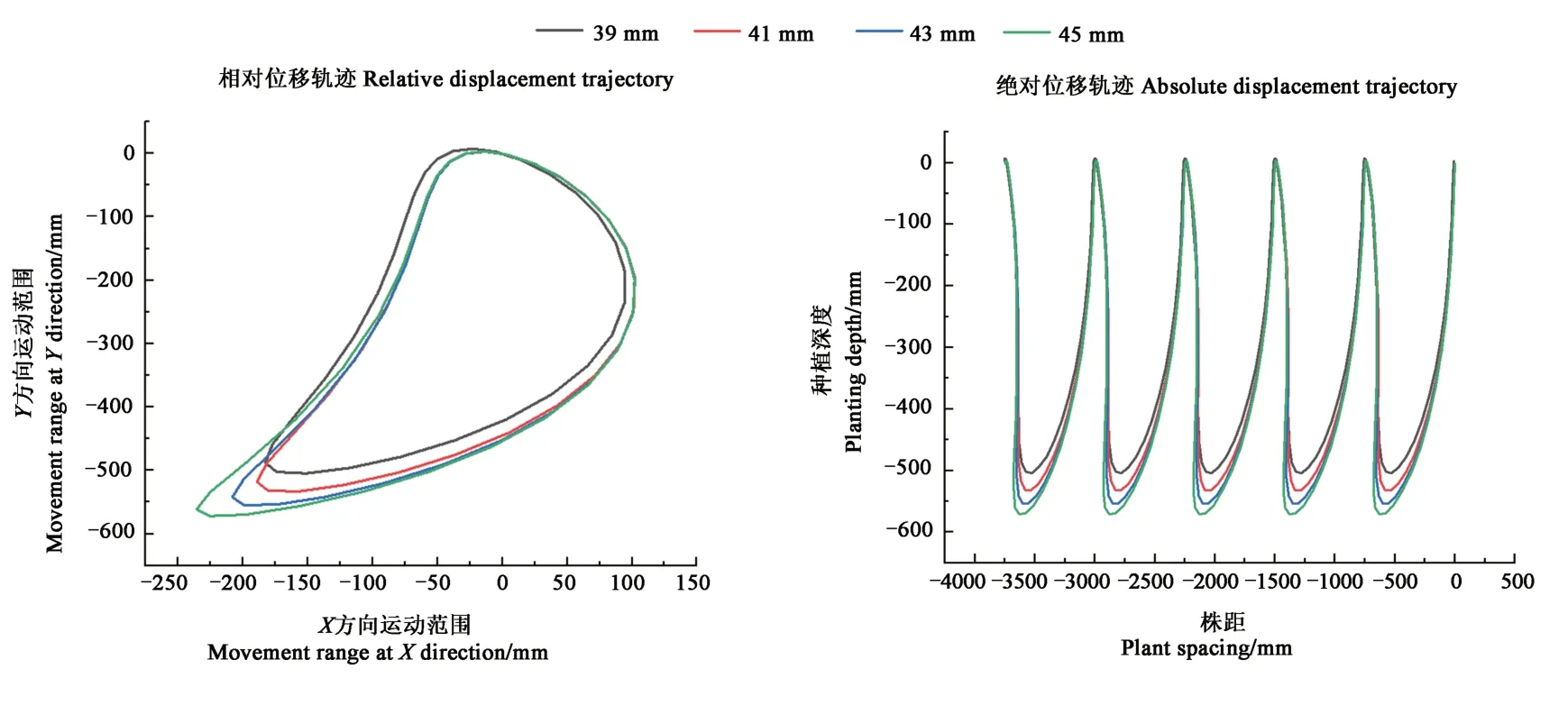
圖6 L1與栽種裝置位移軌跡的關(guān)系Fig.6 Relationship between L1 and displacement trajectory of planting device
2.2 搖桿CD長(zhǎng)度L2對(duì)端點(diǎn)軌跡的影響
L2與鴨嘴種植機(jī)端點(diǎn)軌跡的關(guān)系如圖7所示。可以看出,隨著搖桿CD的長(zhǎng)度L2逐步加長(zhǎng),端點(diǎn)相對(duì)位移軌跡逐漸變短,X、Y軸方向位移逐步變短,運(yùn)動(dòng)軌跡逐步向上傾斜;絕對(duì)位移軌跡中種植深度逐步減小,回程段角度逐步變大。軌跡最低點(diǎn)與X軸正方向夾角逐步增大。軌跡變化說(shuō)明L2變長(zhǎng)可以改變木薯種植深度以及鴨嘴種植機(jī)入土角度,由于軌跡端點(diǎn)角度不宜過(guò)于小,L2最佳長(zhǎng)度為130 mm。
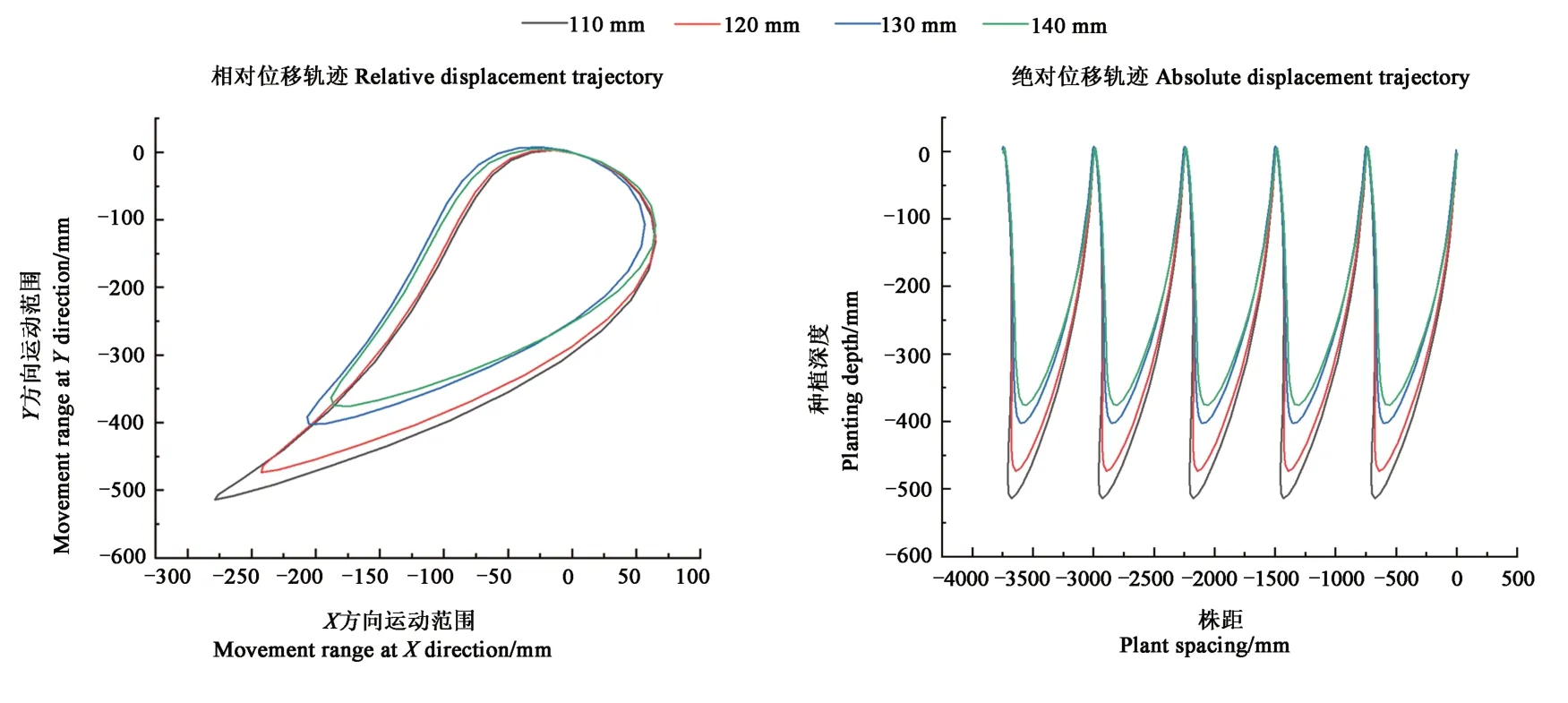
圖7 L2與栽種裝置軌跡之間的關(guān)系Fig.7 Relationship between L2 and planting device trajectory
2.3 連桿BC長(zhǎng)度L3對(duì)端點(diǎn)軌跡的影響
L3與鴨嘴種植機(jī)端點(diǎn)軌跡的關(guān)系如圖8所示。由圖8可知,隨著連桿BC長(zhǎng)度L3逐步加長(zhǎng),端點(diǎn)相對(duì)位移軌跡變化不大,運(yùn)動(dòng)軌跡逐步向左位移;絕對(duì)位移軌跡中種植間距變大。軌跡最低點(diǎn)與X軸正方向夾角逐步減小。軌跡變化說(shuō)明L3對(duì)木薯種植軌跡變化不大。

圖8 L3與栽種裝置軌跡之間的關(guān)系Fig.8 Relationship between L3 and planting device trajectory
2.4 曲柄OF長(zhǎng)度L5對(duì)端點(diǎn)軌跡的影響
L5與鴨嘴種植機(jī)端點(diǎn)軌跡的關(guān)系如圖9所示。可以看出,隨著連桿OF的長(zhǎng)度L5逐步加長(zhǎng),端點(diǎn)相對(duì)位移軌跡變寬,運(yùn)動(dòng)軌跡逐步向左傾斜,軌跡端點(diǎn)逐步變鈍;絕對(duì)位移軌跡中種植段逐步垂直與地面,回程段夾角變小。軌跡最低點(diǎn)與X軸正方向夾角逐步減小。軌跡變化說(shuō)明L5變長(zhǎng)可以改變木薯種植軌跡端點(diǎn)角度,L5最佳長(zhǎng)度為50 mm。
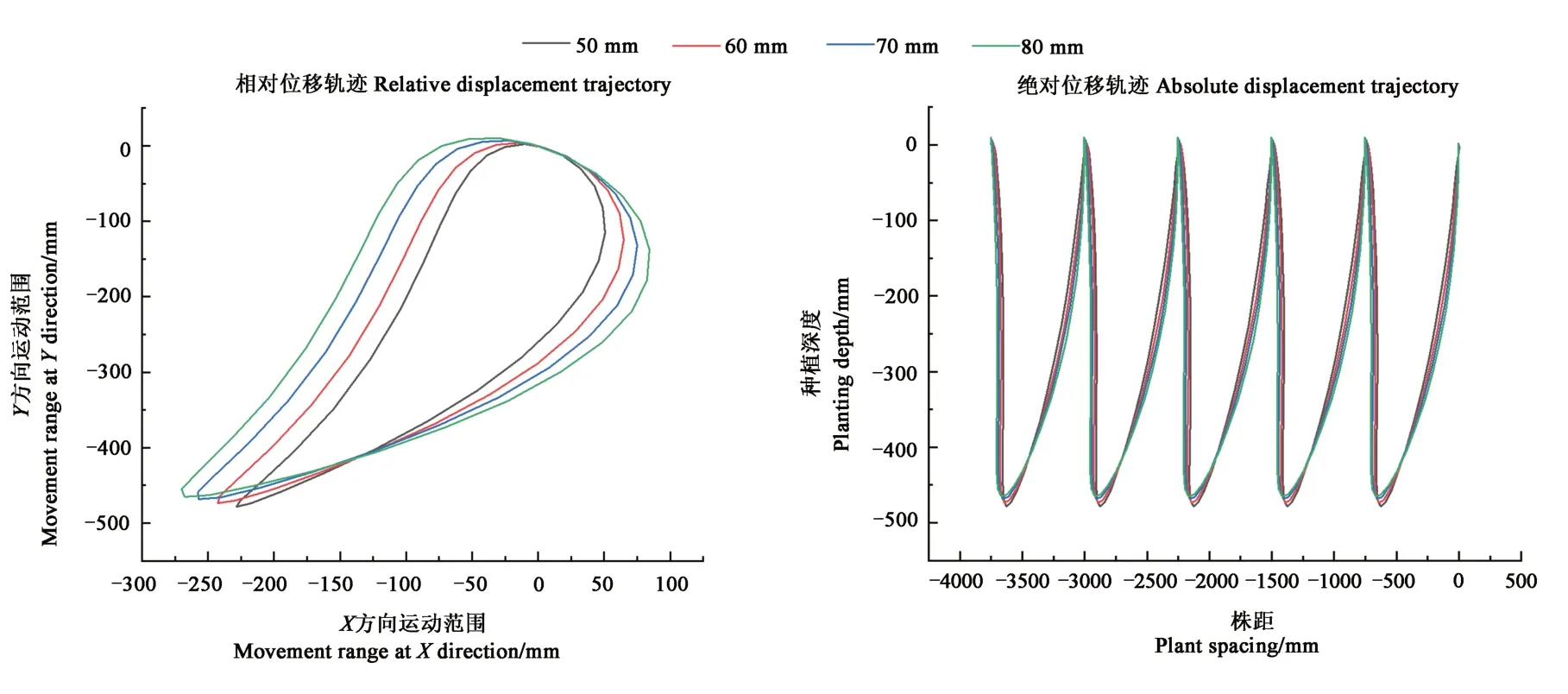
圖9 L5與栽種裝置軌跡之間的關(guān)系Fig.9 Relationship between L5 and planting device trajectory
2.5 搖桿FG長(zhǎng)度L6對(duì)端點(diǎn)軌跡的影響
L6與鴨嘴種植機(jī)端點(diǎn)軌跡的關(guān)系如圖10所示。可以看出,隨著搖桿FG的長(zhǎng)度L6逐步加長(zhǎng),端點(diǎn)相對(duì)位移軌跡逐漸變尖,X軸方向位移逐步變短,Y軸方向逐步變長(zhǎng);絕對(duì)位移軌跡中種植深度逐步加大,種植角度逐漸傾斜。軌跡最低點(diǎn)與X軸正方向夾角變大。軌跡變化說(shuō)明L6變長(zhǎng)可以改變木薯種植間距,種植間距過(guò)大會(huì)影響收益,L6最佳長(zhǎng)度為820 mm。
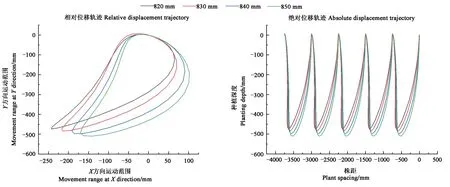
圖10 L6與栽種裝置軌跡之間的關(guān)系Fig.10 Relationship between L6 and planting device trajectory
2.6 鴨嘴栽植器安裝位角度θ對(duì)端點(diǎn)軌跡的影響
鴨嘴種植機(jī)安裝角度與端點(diǎn)軌跡的關(guān)系如圖11所示。可以看出,鴨嘴栽植器的角度逐步變大,端點(diǎn)相對(duì)位移軌跡逐漸變鈍,軌跡逐步向下傾斜,軌跡逐步變寬;絕對(duì)位移軌跡中種植深度逐步加大,種植角度逐漸傾斜,種植間距逐步變大,軌跡逐步變寬。軌跡最低點(diǎn)與X軸正方向夾角變大。軌跡變化說(shuō)明鴨嘴栽植器的角度變大可以改變木薯種植軌跡端點(diǎn)角度以及種植深度,根據(jù)木薯種植規(guī)范要求,鴨嘴栽植器最佳角度為20°。
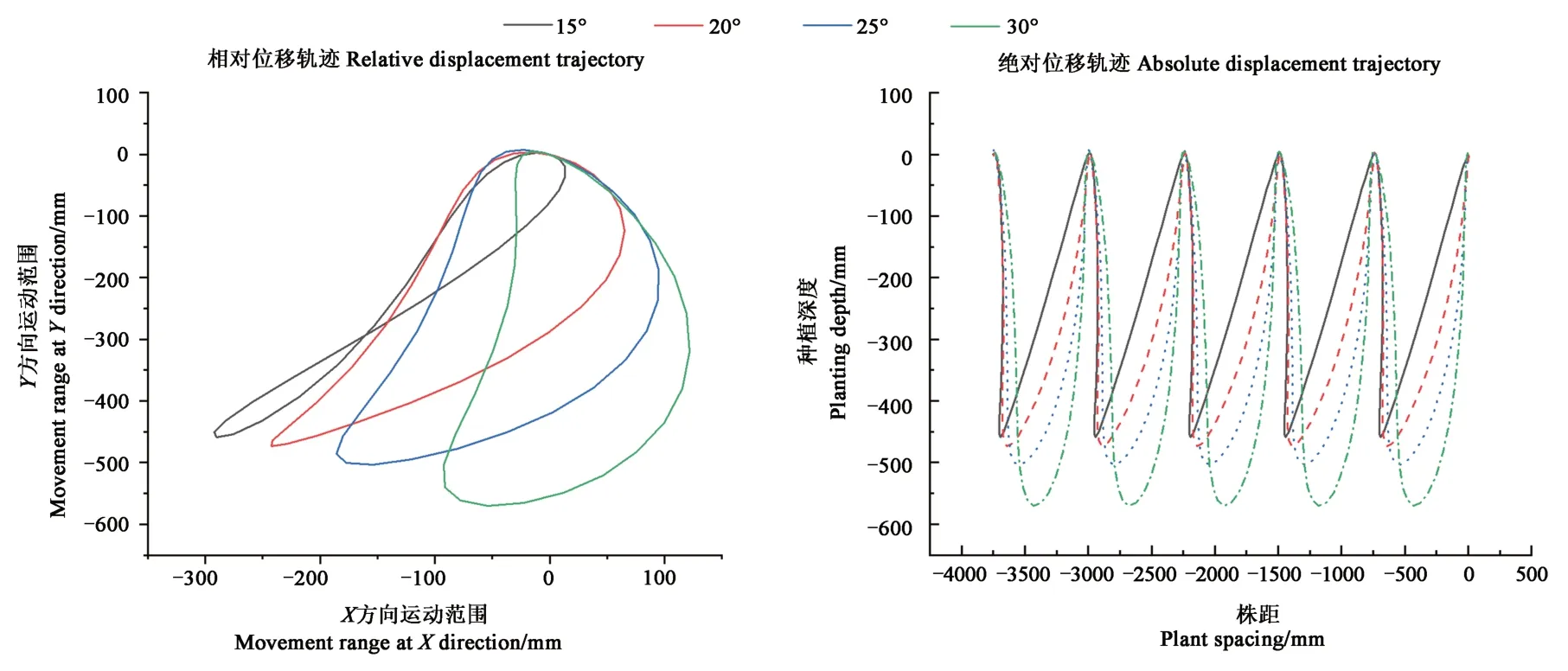
圖11 安裝角度與栽種裝置軌跡之間的關(guān)系Fig.11 Relationship between installation angle and planting device trajectory
2.7 優(yōu)化結(jié)果分析
七連桿機(jī)構(gòu)參數(shù)的敏感值如表1所示。通過(guò)表1,可以看出,L1、L3、L6、栽植機(jī)角度變化對(duì)七連桿機(jī)構(gòu)軌跡影響為正;L2、L5的變化對(duì)七連桿軌跡影響為負(fù)。
綜上所述,曲柄AB長(zhǎng)度L1、連桿BC長(zhǎng)度L3、連桿FG長(zhǎng)度L6、栽植機(jī)安裝角度θ與測(cè)量函數(shù)的關(guān)系為正相關(guān),即隨著L1、L3、L6和安裝角度的增大,鴨嘴栽植器的最低點(diǎn)隨之下降;遙桿CD的長(zhǎng)度L2、曲柄OF的長(zhǎng)度L5與測(cè)量函數(shù)的關(guān)系為負(fù)相關(guān),即隨著L2、L5長(zhǎng)度的增加鴨嘴栽植器的最低點(diǎn)會(huì)上升。并且通過(guò)表1可以看出,敏感值最大的為曲柄AB長(zhǎng)度L1,說(shuō)明曲柄AB尺寸變化對(duì)鴨嘴栽植器最低點(diǎn)的影響最大,連桿BC長(zhǎng)度L3敏感值最小,對(duì)鴨嘴栽植器最低點(diǎn)的影響最小。通過(guò)上文分析并考慮到現(xiàn)實(shí)因素,得出優(yōu)化結(jié)果;L1為47 mm、L2為130 mm、L3為90 mm、L4為800 mm;L5為60 mm、L6為820 mm、L7為360 mm、L8為600 mm;鴨嘴栽植器的安裝角度為20°。利用最優(yōu)解的機(jī)構(gòu)參數(shù),其軌跡如圖12所示。
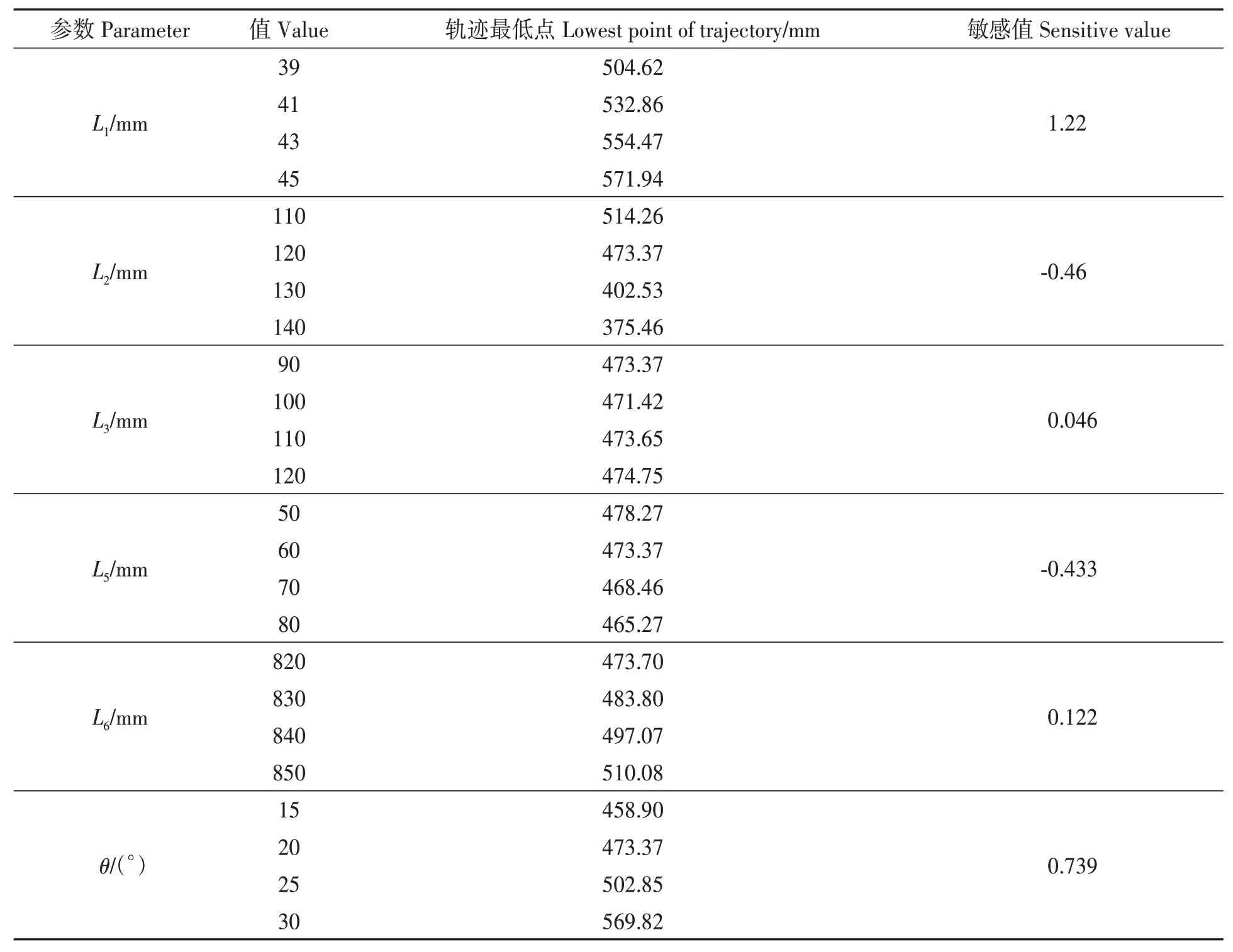
表1 七連桿機(jī)構(gòu)與栽種末端軌跡敏感值的關(guān)系Table 1 Relationship between seven link mechanism and sensitive value of planting end trajectory
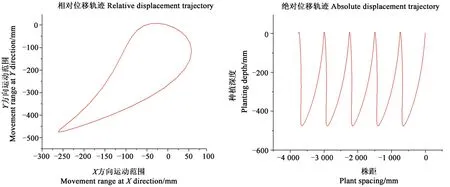
圖12 滿足木薯種植機(jī)要求的栽種裝置端點(diǎn)運(yùn)動(dòng)軌跡Fig.12 Motion track of end point of planting device meeting the requirements of cassava planter
3 討論
以鴨嘴栽植器的最低點(diǎn)為目標(biāo)檢測(cè)函數(shù)[17],使用Adams中的設(shè)計(jì)優(yōu)化,研究七桿式單行木薯種植機(jī)的每個(gè)參數(shù)的敏感值。敏感值體現(xiàn)了七連桿機(jī)構(gòu)中某一參數(shù)對(duì)目標(biāo)函數(shù)的變化影響,負(fù)數(shù)表明變量的變化與測(cè)量結(jié)果的變化是負(fù)相關(guān),正數(shù)表明變量的變化與測(cè)量結(jié)果的變化是正相關(guān)[18]。本研究為了獲得滿足木薯種植農(nóng)藝要求的栽種機(jī)構(gòu)最優(yōu)參數(shù),通過(guò)改變木薯種植機(jī)構(gòu)參數(shù)來(lái)獲得種莖豎插最優(yōu)方案,解決目前木薯在豎插種植方式的空白。
本文所設(shè)計(jì)的雙曲柄七桿式木薯種植機(jī)構(gòu),與傳統(tǒng)直插木薯種植機(jī)構(gòu)相比種植深度、種植間距更加符合木薯種植規(guī)范,種植機(jī)入土角度更適宜木薯生長(zhǎng),可以有效提升木薯產(chǎn)量。
猜你喜歡
計(jì)算機(jī)應(yīng)用(2023年1期)2023-02-03 03:09:28
音樂(lè)天地(音樂(lè)創(chuàng)作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
數(shù)學(xué)小靈通(1-2年級(jí))(2021年3期)2021-04-13 01:01:58
計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
數(shù)學(xué)小靈通·3-4年級(jí)(2017年11期)2017-11-29 01:35:50